
X/ENS Modélisation PSI 2019
| Thème de l'épreuve | Étude d'un véhicule sous-marin autonome : modélisation, identification et localisation |
| Principaux outils utilisés | dynamique des solides, modélisation des actions mécaniques, filtrage de signaux |
| Mots clefs | dynamique, lois de commande, mesures de capteur |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - -
Énoncé complet
(télécharger le PDF)







Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ECOLES NORMALES SUPERIEURES -- ECOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2019
JEUDI 25 AVRIL 2019 - 8h00 - 13h00
FILIERE PSI
COMPOSITION de MODELISATION
(XUCR)
Durée : 5 heures
L'utilisation des calculatrices n'est pas autorisée pour cette épreuve
Si, au cours de l'épreuve, un candidat repère ce qui lui semble être une erreur
d'énoncé, il le signale sur sa copie et poursuit sa composition en expliquant
les
raisons des initiatives qu'il est amené à prendre
Etude d'un véhicule sous-marin autonome :
modélisation, identification et localisation
1 Présentation de l'étude
1.1 Les enjeux liés aux drones sous-marins
L'impact et le potentiel des océans dans le déve-
loppement humain est indéniable : ils ont été tout au
long de l'histoire un élément clé pour les domaines
économique, militaire et scientifique. D'un point de
vue économique, les mers sont les fondations de l'in-
dustrie de la pêche mais elles sont aussi utilisées pour
établir les routes commerciales. Aujourd'hui, en temps
de forte croissance démographique, les mers et océans,
recouvrant environ 70% de la surface de la Terre, sont
considérés comme un enjeu majeur d'un point de vue
économique, écologique et géopolitique. La connais-
sance des océans, à travers les mesures physiques et
chimiques des eaux, permet aux chercheurs d'anticiper
l'évolution de notre environnement.
L'humanité a toujours exploité les ressources de
l'océan à l'aide de la technologie, dans un premier
temps avec des navires puis des sous-marins pour ar-
river désormais aux drones sous-marin. Aujourd'hui,
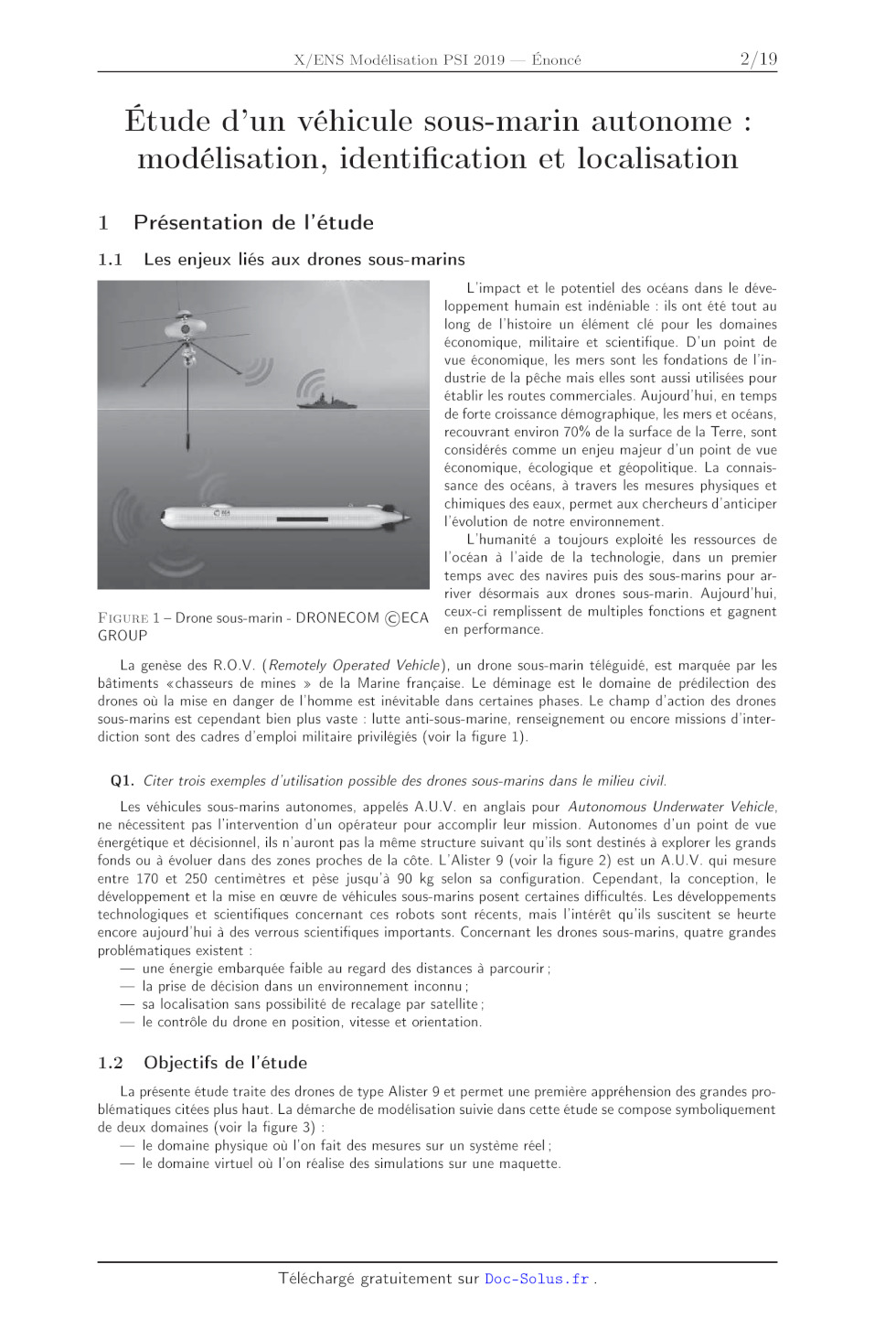
FIGURE 1 -- Drone sous-marin - DRONECOM ©ECA ceux-ci remplissent de multiples
fonctions et gagnent
GROUP en performance.
La genèse des R.O.V. (Remotely Operated Vehicle), un drone sous-marin
téléguidé, est marquée par les
bâtiments «chasseurs de mines » de la Marine française. Le déminage est le
domaine de prédilection des
drones où la mise en danger de l'homme est inévitable dans certaines phases. Le
champ d'action des drones
sous-marins est cependant bien plus vaste : lutte anti-sous-marine,
renseignement ou encore missions d'inter-
diction sont des cadres d'emploi militaire privilégiés (voir la figure 1).
Q1. Citer trois exemples d'utilisation possible des drones sous-marins dans le
milieu civil.
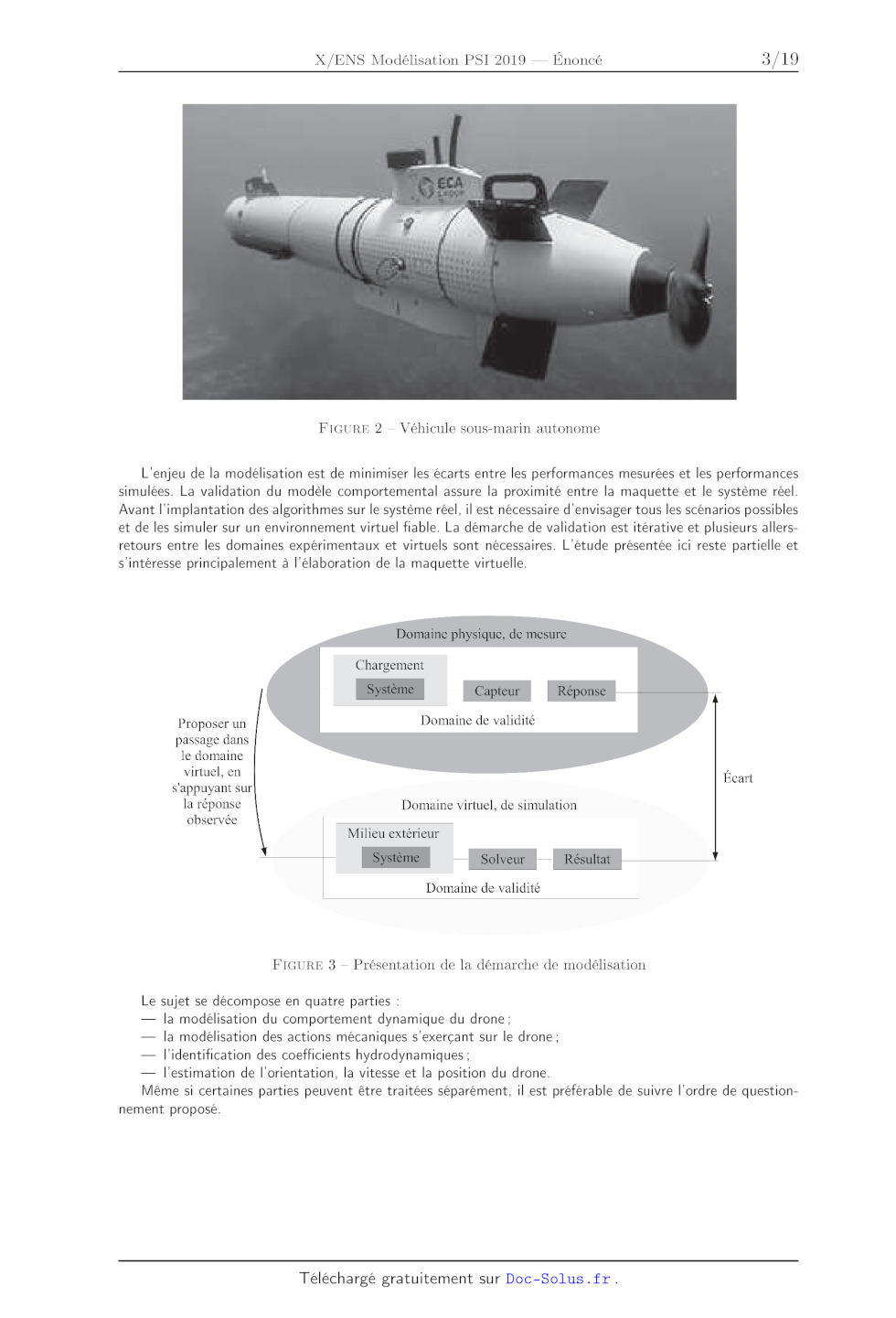
Les véhicules sous-marins autonomes, appelés A.U.V. en anglais pour Autonomous
Underwater Vehicle,
ne nécessitent pas l'intervention d'un opérateur pour accomplir leur mission.
Autonomes d'un point de vue
énergétique et décisionnel, ils n'auront pas là même structure suivant qu'ils
sont destinés à explorer les grands
fonds ou à évoluer dans des zones proches de la côte. L'Alister 9 (voir la
figure 2) est un A.U.V. qui mesure
entre 170 et 250 centimètres et pèse jusqu à 90 kg selon sa configuration.
Cependant, la conception, le
développement et la mise en oeuvre de véhicules sous-marins posent certaines
difficultés. Les développements
technologiques et scientifiques concernant ces robots sont récents, mais
l'intérêt qu'ils suscitent se heurte
encore aujourd hui à des verrous scientifiques importants. Concernant les
drones sous-marins, quatre grandes
problématiques existent :
-- une énergie embarquée faible au regard des distances à parcourir ;
-- la prise de décision dans un environnement inconnu ;
-- sa localisation sans possibilité de recalage par satellite ;
-- le contrôle du drone en position, vitesse et orientation.
1.2 Objectifs de l'étude
La présente étude traite des drones de type Alister 9 et permet une première
appréhension des grandes pro-
blématiques citées plus haut. La démarche de modélisation suivie dans cette
étude se compose symboliquement
de deux domaines (voir la figure 3) :
-- le domaine physique où l'on fait des mesures sur un système réel ;
-- le domaine virtuel où l'on réalise des simulations sur une maquette.
FIGURE 2 -- Véhicule sous-marin autonome
L'enjeu de la modélisation est de minimiser les écarts entre les performances
mesurées et les performances
simulées. La validation du modèle comportemental assure la proximité entre la
maquette et le système réel.
Avant l'implantation des algorithmes sur le système réel, il est nécessaire
d'envisager tous les scénarios possibles
et de les simuler sur un environnement virtuel fiable. La démarche de
validation est itérative et plusieurs allers-
retours entre les domaines expérimentaux et virtuels sont nécessaires. L'étude
présentée ici reste partielle et
s intéresse principalement à l'élaboration de la maquette virtuelle.
Le
Proposer un
passage dans
le domaine
virtuel, en
s'appuyant sur
la réponse
observée
Domaine physique, de mesure
Chargement
Domaine de validité
Écart
Domaine virtuel, de simulation
Milieu extérieur
Domaine de validité
FIGURE 3 -- Présentation de la démarche de modélisation
sujet se décompose en quatre parties :
la modélisation du comportement dynamique du drone;
la modélisation des actions mécaniques s'exerçant sur le drone;
l'identification des coefficients hydrodynamiques ;
l'estimation de l'orientation, la vitesse et la position du drone.
Même si certaines parties peuvent être traitées séparément, il est préférable
de suivre l'ordre de question-
nement proposé.
2 Modélisation du comportement dynamique du véhicule
Cette partie est consacrée à la modélisation mécanique d'un drone sous-marin
autonome. Les équations du
modèle décrivent le comportement du drone dans l'espace et relient donc les 6
degrés de liberté. Cette partie
aborde plusieurs aspects distincts qui sont :
-- |a cinématique du véhicule ;
-- le comportement dynamique du véhicule ;
-- les actions mécaniques extérieures au véhicule.
2.1 Définitions des référentiels fixe et mobile
Afin d'étudier les mouvements du drone, il est important de définir différents
référentiels. Les notations
et la description de la position et de l'orientation du drone sont issues de la
norme établie par la S.N.A.M.E
(Society of Naval Architects and Marine Engineers) en 1950.
On définit le repère Ro(O, Xo, Yo, Zo) fixe par rapport à la terre. Comme
illustré sur la figure 4, ce repère Ro
est un repère galiléen tel que :
-- © soit le point de départ du mouvement ;
-- %9 soit l'axe longitudinal orienté vers le Nord géographique ;
-- ÿy0 soit l'axe transversal orienté vers l'Est ;
-- 2 soit l'axe dirigé vers le centre de la terre.
O ST
= DL
----
be nn.
FIGURE 4 - Définition des repères fixe et mobile
On appelle carène la partie immergée d'un vaisseau. Le point EUR désigne le
centre de carène, c'est-à-dire le
centre du volume d'eau déplacé par le drone. Pour notre étude de cas, le point
EUR est à l'intersection des plans
de symétries géométriques du système ; il est également l'origine du repère
mobile.
Comme illustré sur la figure 4, on définit le repère mobile R:1(C, 1, ÿ1, 21)
lié au véhicule en position de repos
par :
-- C le centre de carène du véhicule ;
-- %; l'axe longitudinal orienté vers le sens d'avancement ;
-- 1 l'axe transversal orienté vers le sens du glissement à droite ;
-- 71 l'axe dirigé vers la descente en profondeur.
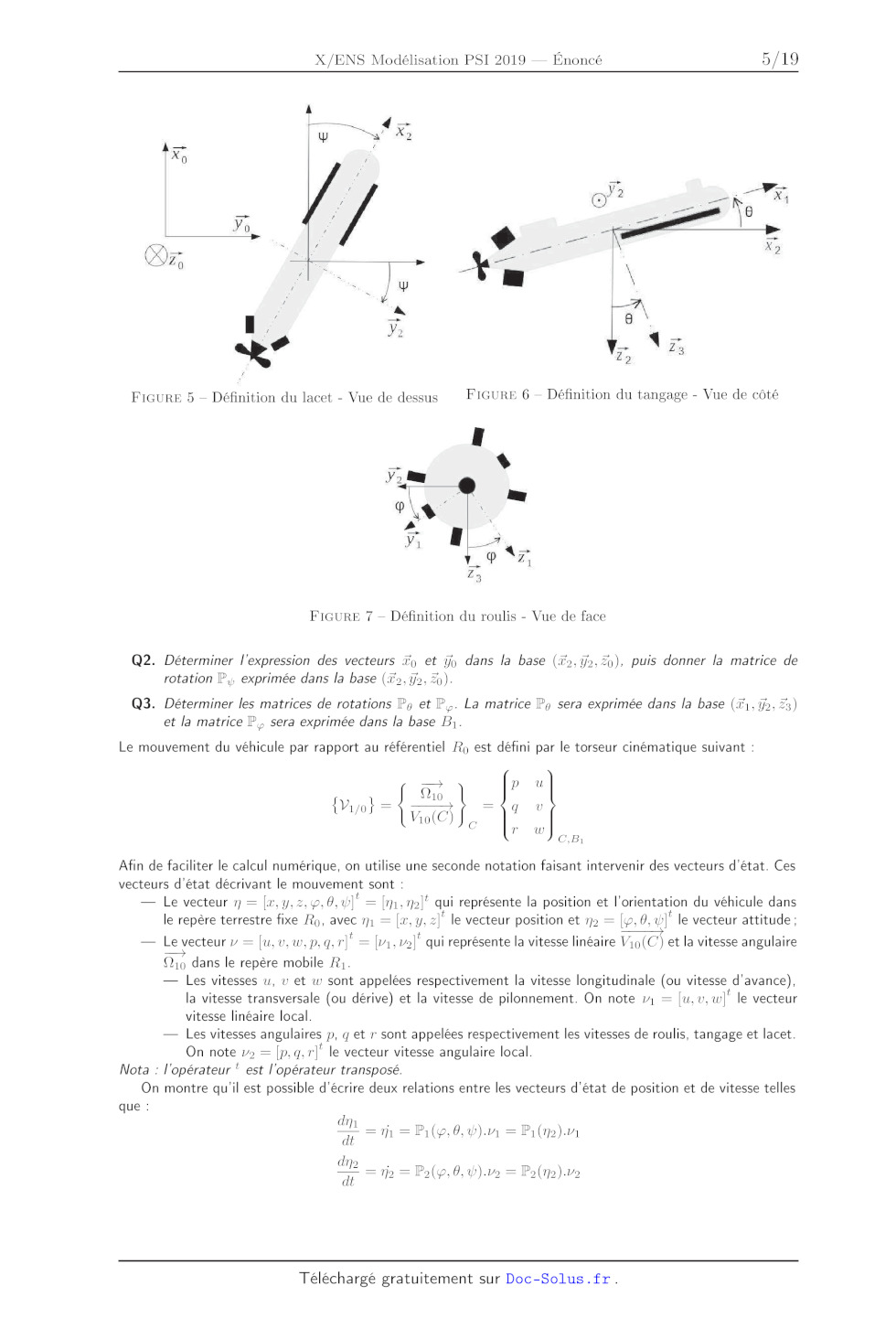
Afin de positionner dans l'espace le repère mobile par rapport au repère fixe,
six paramètres sont définis de la
façon suivante (et illustrés sur les figures 5, 6 et 7) :
-- 3 paramètres linéaires x, y et z représentant les coordonnées du vecteur
position OC dans le repère
fixe Ro
OÙ = x. Lo + Y.Yo + 2.20
-- 3 paramètres angulaires 4, 0 et 1 représentant l'orientation de la base
mobile B; = (X1,ÿ1,21) par
rapport à la base fixe Bo = (Xo, Yo, Zo). Ces angles w, 0 et 1 sont nommés
respectivement roulis,
tangage et lacet.
On appelle P5: la matrice de passage de la base Bo à la base B; :
P
Bo -- BP
La matrice P5: est définie par le produit matriciel des trois matrices de
passage liées aux angles de roulis, de
tangage et de lacet selon :
, 2 _ = _ O,ÿ: _ = _ À
Bo (Pr20), (T2, ÿ2, 20) (63), (T1, Yo, 23) (rh), Bi
Poi = Py.Po.P4
v-
22
FIGURE 5 - Définition du lacet - Vue de dessus FIGURE 6 -- Définition du
tangage - Vue de côté
FIGURE 7 -- Définition du roulis - Vue de face
Q2. Déterminer l'expression des vecteurs Xo et yo dans la base (ï2,ÿ2, Z), puis
donner la matrice de
rotation P,, exprimée dans la base (X2, ÿ2, Zo).
Q3. Déterminer les matrices de rotations Ps et P,. La matrice Po sera exprimée
dans la base (T1, ÿ2, 33)
et la matrice P,, sera exprimée dans la base B:.
Le mouvement du véhicule par rapport au référentiel Ro est défini par le
torseur cinématique suivant :
Où PT
10
V ZE Vio(C) ZE
T UÙ
Afin de faciliter le calcul numérique, on utilise une seconde notation faisant
intervenir des vecteurs d'état. Ces
vecteurs d'état décrivant le mouvement sont :
-- Le vecteur 7 -- x, y, 2,w, 0, 0l' = [m1,172]|" qui représente la position et
l'orientation du véhicule dans
le repère terrestre fixe Ro, avec m1 = |[x,y,2] le vecteur position et 72 = |,
06, pl' le vecteur attitude ;
-- Le vecteur 7 = [u,v,w, p, q, rl' = |v1, vo] qui représente la vitesse
linéaire V14(C°) et la vitesse angulaire
C',B:
(10 dans le repère mobile R:.
-- Les vitesses u, v et w sont appelées respectivement la vitesse longitudinale
(ou vitesse d'avance),
la vitesse transversale (ou dérive) et la vitesse de pilonnement. On note 2 =
[u,v,wl]' le vecteur
vitesse linéaire local.
-- Les vitesses angulaires p, q et r sont appelées respectivement les vitesses
de roulis, tangage et lacet.
On note 2 -- Ip, q,r| le vecteur vitesse angulaire local.
Nota : l'opérateur * est l'opérateur transposé.
On montre quil est possible d'écrire deux relations entre les vecteurs d'état
de position et de vitesse telles
que :
d
-- 71 -- P;(%,06, d).v1 -- P;(72).71
d
-- -- 1992 -- P2(4%,0,1).10 -- P2(72).722
Q4. Déterminer l'expression de la vitesse V:0(C') en fonction des paramètres
11. En déduire l'expression de
la matrice P: (72) dans la base B:.
L'expression de la matrice de passage P> dans la base B; est donnée par :
1 sin(sp).tan(0) cos(o).tan(d)
Po(no) = [O0 cos(e) --sin(s)
0 sin(s)/cos(0) cos(s)/cos(à)
Afin de simplifier la modélisation du comportement dynamique, nous considérons
non plus un problème global
dans l'espace des six degrés de liberté mais deux sous-problèmes différents :
-- le comportement en plongée ;
-- le maintien de cap.
L'étude du maintien de cap impose une profondeur d'immersion constante À et une
attitude du drone le gardant
toujours dans un plan parallèle au plan (0, ïo, Yo). Sa vitesse dans la
direction d'avance x; est considérée comme
constante et égale à V.
Q5. Déterminer alors la forme des deux vecteurs d'état n et v caractérisant le
mouvement en maintien de
cap, ainsi que le système d'équation reliant les paramètres de position et de
vitesse locale.
Pour le reste de la modélisation du comportement dynamique du véhicule, nous
privilégierons le problème
découplé dans le plan de la plongée. Nous avons besoin de considérer alors les
variables suivantes :
-- x, la position horizontale du véhicule ; -- u, Sa vitesse d'avancement ;
-- 2, sa profondeur ; -- w, sa vitesse de descente ;
-- 0, son angle de tangage ; -- q, Sa vitesse de tangage.
Tous les autres paramètres seront considérés constants et nuls. Les vecteurs
d'état 7 et v sont donc respecti-
vement réduits à {x,z,0] et [u, w, q|.
2.2 Définition des caractéristiques inertielles
Avant tout choix architectural, un cahier des charges auquel le drone doit
répondre est fixé :
-- il doit être transportable par deux personnes ;
-- il doit avoir jusqu à 20 heures d'autonomie ;
-- sa maintenance et sa récupération doivent être facilitées ;
-- il doit être maniable à haute et basse vitesse (vitesse nominale de 1,5
m.s7! et vitesse maximale de
2,5 m.s" 1) :
-- il doit naviguer jusqu'à 200 mètres de profondeur.
Ces critères débouchent sur quelques caractéristiques du drone comme la
conception de poignée, la masse
maximale de 70 kg, la forme cylindrique allongée (200 cm de long pour un
diamètre de 22 cm), et également
sur le fait qu'une fois mis à l'eau et sans propulsion, le drone doit rester
dans la position stable, qui s'obtient
pour les angles 0 et & nuls. On rappelle que le centre de masse G du système
correspond au barycentre des
particules composant le système pondérées par leurs masses. On appelle m la
masse du véhicule et G son
centre de masse tel que :
CG = XGL1 + Ya.Y + Za.Z
Q6. Afin de faciliter la récupération du drone, il est nécessaire que sans
apport d'énergie le drone remonte
à la surface. Cette exigence est-elle vérifiée ? Vous justifierez bien votre
démarche de raisonnement.
Q7. Afin d'assurer la stabilité de l'engin lorsqu'il est au repos, déterminer
les conditions que doit vérifier
la position du centre de gravité par rapport au centre de carène (vous pourrez
vous appuyer sur un
schéma).
On appelle 7(G) la matrice d'inertie définie au centre de masse G du véhicule.
Cette matrice s'exprime
dans la base mobile (X1,Y1,21) par :
I(G)= | Ly Ly --lys
--l%z --Llyz Le
avec zx, lyy et L., les moments d'inertie et J,,, I, et 1, les produits
d'inertie.
Q8. L'opérateur d'inertie peut-il se simplifier au centre de gravité G ? Si
oui, donner la forme de sa matrice.
Par la suite, pour simplifier l'étude nous posons :
CÈ = Ze.z
Q9. Calculer Vio(G, la vitesse au point G du drone dans son mouvement par
rapport au repère fixe, en
fonction des paramètres u, w, q et Za.
Q10. Montrer que l'io(G), l'accélération au point G du drone dans son mouvement
par rapport au repère
fixe, peut s écrire sous la forme :
du dq . dw .,
Pio(G) = (a + Aya + Ban) T1 + (a + C,.q.u + DA} Z1
À,, B,, C, et D, sont à exprimer en fonction des données du problème.
Q11. Montrer que d10(C , le moment dynamique au point C du drone dans son
mouvement par rapport au
repère fixe, peut s'écrire sous la forme :
dq du .,
d10(C -- (as. 4 + Dee + 1) U1
A5, B$5 et C5 sont à exprimer en fonction des données du problème.
Le vecteur d'état v, réduit au vecteur [u,w,q|, exprime dans le repère local
l'évolution du mouvement
d'immersion. À partir du principe fondamental de la dynamique, il est possible
d'écrire le système d'équations
de mouvement sous la forme :
ME,.2 + Co(r).0 = fort
-- f.xt représente les actions mécaniques extérieures au système s'appliquant
au centre de carène C;
-- M, désigne une matrice représentant l'inertie du véhicule ;
-- C,;(v) désigne une matrice représentant des forces inertielles du
référentiel mobile.
Q12. Déterminer les expressions de M, et de C,(v) à partir des équations de la
dynamique du véhicule en
fonction de m, À,, B,, C,, D,, A5, Bs et Cs dans le cas du mouvement
d'immersion. Quelles sont
les propriétés vérifiées par les matrices M, et C,(r) ?
Afin de satisfaire la commande du comportement du drone, il est important de
modéliser l'ensemble des actions
mécaniques extérieures fx, ce qui est l'objet de la partie 3.
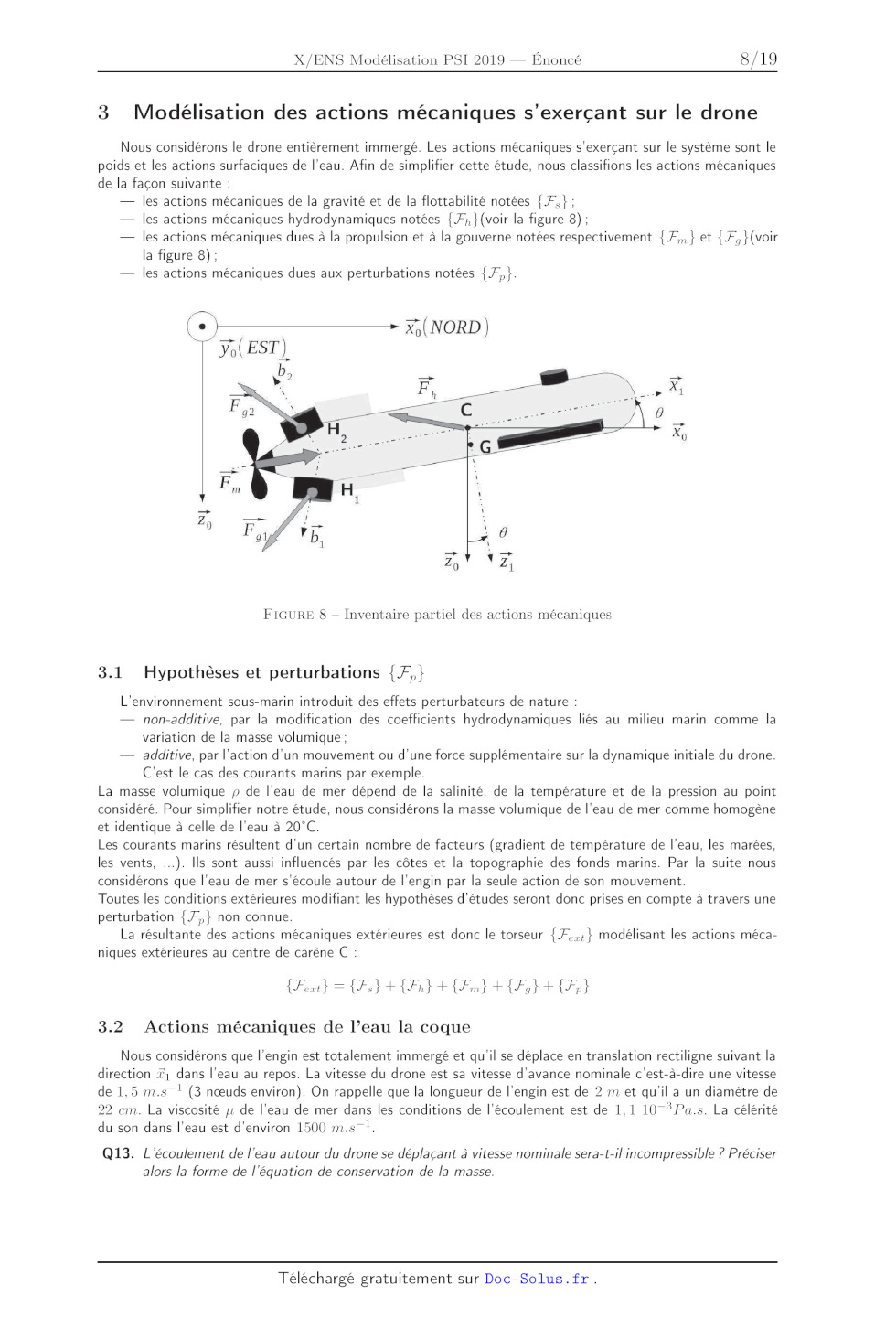
3 Modélisation des actions mécaniques s'exerçant sur le drone
Nous considérons le drone entièrement immergé. Les actions mécaniques
s'exerçant sur le système sont le
poids et les actions surfaciques de l'eau. Afin de simplifier cette étude, nous
classifions les actions mécaniques
de la façon suivante :
-- les actions mécaniques de la gravité et de la flottabilité notées {F,};
-- les actions mécaniques hydrodynamiques notées {F3 }(voir la figure 8) ;
-- les actions mécaniques dues à la propulsion et à la gouverne notées
respectivement {F,,} et {F, }(voir
la figure 8) ;
-- les actions mécaniques dues aux perturbations notées {7}.
> X (NORD)
--
Y t +
Zo Z;
FIGURE 8 -- Inventaire partiel des actions mécaniques
3.1 Hypothèses et perturbations {F,}
L'environnement sous-marin introduit des effets perturbateurs de nature :
-- non-additive, par la modification des coefficients hydrodynamiques liés au
milieu marin comme la
variation de la masse volumique ;
-- additive, par l'action d'un mouvement ou d'une force supplémentaire sur la
dynamique initiale du drone.
C'est le cas des courants marins par exemple.
La masse volumique p de l'eau de mer dépend de la salinité, de la température
et de la pression au point
considéré. Pour simplifier notre étude, nous considérons la masse volumique de
l'eau de mer comme homogène
et identique à celle de l'eau à 20°C.
Les courants marins résultent d'un certain nombre de facteurs (gradient de
température de l'eau, les marées,
les vents, ..). Ils sont aussi influencés par les côtes et la topographie des
fonds marins. Par la suite nous
considérons que l'eau de mer s'écoule autour de l'engin par la seule action de
son mouvement.
Toutes les conditions extérieures modifiant les hypothèses d'études seront donc
prises en compte à travers une
perturbation {F,} non connue.
La résultante des actions mécaniques extérieures est donc le torseur {F:,+}
modélisant les actions méca-
niques extérieures au centre de carène EUR :
Feat} = Ps} + Ph} + nm} + 19} + (Pp}
3.2 Actions mécaniques de l'eau la coque
Nous considérons que l'engin est totalement immergé et qu'il se déplace en
translation rectiligne suivant la
direction x, dans l'eau au repos. La vitesse du drone est sa vitesse d'avance
nominale c'est-à-dire une vitesse
de 1,5 m.57! (3 noeuds environ). On rappelle que la longueur de l'engin est de
2 m et qu'il a un diamètre de
22 cm. La viscosité 1 de l'eau de mer dans les conditions de l'écoulement est
de 1,1 10-*Pa.s. La célérité
du son dans l'eau est d'environ 1500 m.s--{.
Q13. L écoulement de l'eau autour du drone se déplaçant à vitesse nominale
sera-t-il incompressible ? Préciser
alors la forme de l'équation de conservation de la masse.
Q14. Déterminer le nombre de Reynolds R. relatif à cet écoulement. Quel est le
régime d'écoulement du
fluide ?
La pression de l'eau exerce sur la coque de l'engin des actions mécaniques. On
découpe cette interaction au
niveau de la surface de contact fluide solide en trois phénomènes :
-- la flottabilité Fo (au repos, elle correspond à la poussée d'Archimède) ;
-- l'action mécanique inertielle d'une masse d'eau déplacée F1:
-- le frottement hydrodynamique Fo.
Il est possible de modéliser ces actions mécaniques localement en la somme de
trois glisseurs au point M
appartenant à la surface de la coque comme suit :
dEy = --p.ñidS = dFyo + dFy1 + dE
Afin de proposer un modèle des différents phénomènes, nous étudions
l'écoulement d'eau autour de la
coque de l'engin. Pour cela, nous établissons le bilan de la quantité de
mouvement d'un fluide newtonien sur
un volume D dont le bord est noté OD :
_ | vds = | Pie | p(üs.n) tedS -- | pjÿdy -- | LA dV
D D OD D D
Q15. Déterminer à partir du bilan de la quantité de mouvement l'expression des
trois forces élémentaires
dFho, dFn1 et dFn2. Ces forces peuvent avoir une contribution volumique dV
et/ou surfacique dS.
Le terme hydrostatique de la pression entraîne une force de poussée verticale
correspondant à l'opposé du
poids du volume d'eau déplacé. Cette force de flottabilité s'exerce au centre
de carène EUR tandis que le poids
s exerce au point G. On pourra considérer que la masse d'eau déplacée est égale
à la masse de l'engin m.
Q16. Déterminer le torseur des actions mécaniques résultant du poids et de la
flottabilité de l'engin au point
C. En déduire alors le torseur {F;} exprimé au point C.
Afin d'obtenir les effets d'inertie de l'eau déplacée par l'engin, nous
intégrons l'équation locale suivante
associée à la pression p:1 :
OP --
Pr + Sgrad (&)° + p = C(t)
ce _ >
Cette équation est valable sur une ligne de courant et le potentiel ® est
défini par ü. = grad(®).
Q17. Citer les différentes hypothèses permettant d'écrire cette équation locale
à partir du bilan de la quantité
de mouvement sur le volume d'eau D.
L'intégration de l'expression locale des actions mécaniques permet de modéliser
globalement le premier
torseur hydrodynamique {F3,1 } réduit au point C. À l'aide d'un logiciel de
calcul et pour notre cas d'immersion,
les coefficients calculés en fonction de la masse d'eau m. sont :
--0, 1.me.ù + me.(w.Q) 0
{F1} -- 0 --Me (En) g + 0,9.m..w.u
--m..ù + 0,1.m.(u.Q) 0
C',B:
Les effets de la viscosité sur la coque produisent une force de portance et une
force de traînée. Le phénomène
de viscosité est modélisé, dans le cas d'immersion, par le torseur {F2} suivant
:
-- (Cu + Cuu lul) u 0
{Fh2} = 0 -- (Ca + Caa la) q
-- (Ci + Cow |W|) w 0
C',B:
Q18. Justifier la forme des frottements visqueux { F2}.
Nota : La recherche des coefficients d'amortissement de portance et de traînée
est réalisée par identification
du comportement. La partie 4 traite de ce sujet.
3.3 Actions mécaniques de commande (propulsion et gouverne)
Des pales formant une hélice sont fixées sur un arbre en rotation et permettent
de générer une force de
poussée selon la direction x. Une approximation de la force de poussée ainsi
que du couple résistant généré
est faite en supposant que l'on peut écrire :
En Im
{Propulsion} = 4 0 O0
Û Û CB:
avec
Fn = Pa (4) u, Tn = P, (42) w?,
où w, est la vitesse de rotation du moteur de l'hélice et u,, la vitesse
d'avance du drone.
Comme illustré sur la figure 9, la gouverne est composée de quatre ailerons
mobiles pouvant tourner d'un
angle 0; autour de l'axe (4, bi). Ces ailerons forment donc quatre surfaces
présentant un angle d'incidence
a; avec l'écoulement de l'eau de mer autour de la coque du drone.
£ :
%. FA L El « ) 3
-- * D. .
À F;(a;) -- F NH Y H,
| o, w À, | de af
hi #
Li _ a b.
b. À > 9
1 Y 1
FIGURE 9 -- Architecture des gouvernes
L'action mécanique de l'eau sur la gouverne est modélisée par un glisseur au
point À; et dont chaque
composante dans la base (ë. bi, Gi) est une fonction dépendant de l'angle
d'incidence à; :
--Fp (ai) di -- FL (ai) C |
H;
{Gouverne;} -- 5
Soit H un point de l'axe (C,%X1) tel que HC -- [x,. Les points H; sont repérés
à partir du point H par
HH = Rb..
Q19. Déterminer les composantes de la force et du moment en C de l'action
mécanique de l'eau sur la
gouverne 0 et sur la gouverne 1 dans la base (1. bo. bi) en fonction de Fh(ao),
Fr(ao), Fp(ai),
FL(a) et de R.
On suppose que le drone se déplace en translation rectiligne uniforme dans là
même direction que le Nord
et à une profondeur fixée. Il n'y a aucun élément pouvant perturber le
comportement du drone.
Q20. Déterminer le torseur des actions mécaniques globales de l'eau sur les
gouvernes au point C si l'angle
d'incidence à est identique pour les quatre gouvernes. Quel est le rôle des
forces de portance sur le
comportement dynamique du drone ?
Q21. Afin de garder un mouvement dans le plan (%1,21), déterminer les 3
relations que doivent vérifier les
actions mécaniques de portance et de traînée des gouvernes.
Q22. Est-il possible de piloter indépendamment tous les degrés de liberté du
drone dans le plan (X1, 21) ?
Justifier votre réponse.
©
4 Identification des coefficients hydrodynamiques
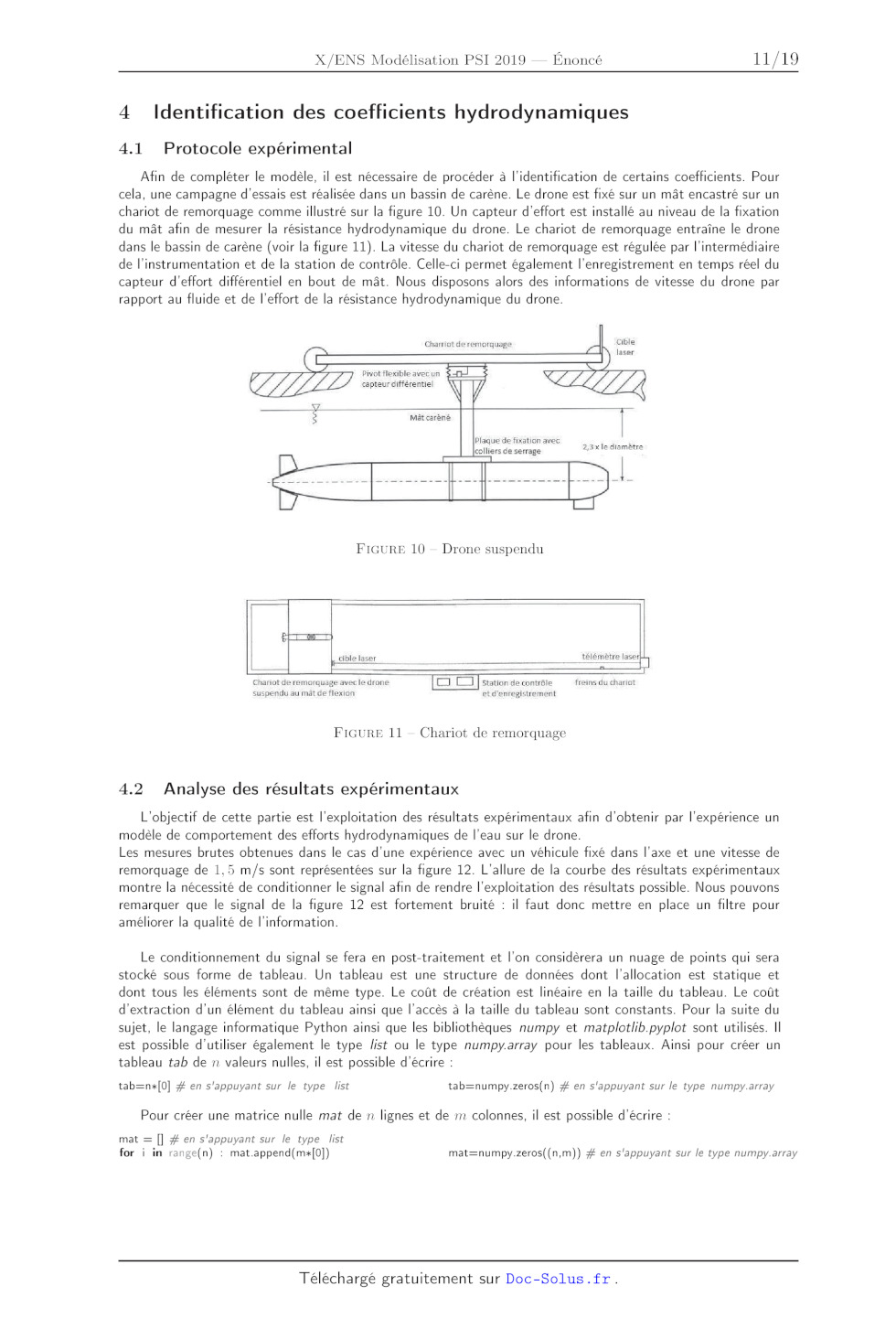
4.1 Protocole expérimental
Afin de compléter le modèle, il est nécessaire de procéder à l'identification
de certains coefficients. Pour
cela, une campagne d'essais est réalisée dans un bassin de carène. Le drone est
fixé sur un mât encastré sur un
chariot de remorquage comme illustré sur la figure 10. Un capteur d'effort est
installé au niveau de la fixation
du mât afin de mesurer la résistance hydrodynamique du drone. Le chariot de
remorquage entraîne le drone
dans le bassin de carène (voir la figure 11). La vitesse du chariot de
remorquage est régulée par l'intermédiaire
de l'instrumentation et de la station de contrôle. Celle-ci permet également
l'enregistrement en temps réel du
capteur d'effort différentiel en bout de mât. Nous disposons alors des
informations de vitesse du drone par
rapport au fluide et de l'effort de la résistance hydrodynamique du drone.
Charriot de remorquage Cible
= | laser
_ _ Ve
Pivot flexible avec un
ARLES capteur différentiel \ /
Mât carèné
Plaque de fixation avec
le diamë
colliers de serrage 2,3 x le diamètre
]
ns nt
ue où on ee el = On mn ee um ne mn ee mm
FIGURE 10 -- Drone suspendu
LES
. Cible laser télémètre laser
Chariot de remorquage avec le drone | CIE | Station de contrôle freins du
chariot
suspendu au mât de flexion et d'enregistrement
FIGURE 11 -- Chariot de remorquage
4.2 Analyse des résultats expérimentaux
L'objectif de cette partie est l'exploitation des résultats expérimentaux afin
d'obtenir par l'expérience un
modèle de comportement des efforts hydrodynamiques de l'eau sur le drone.
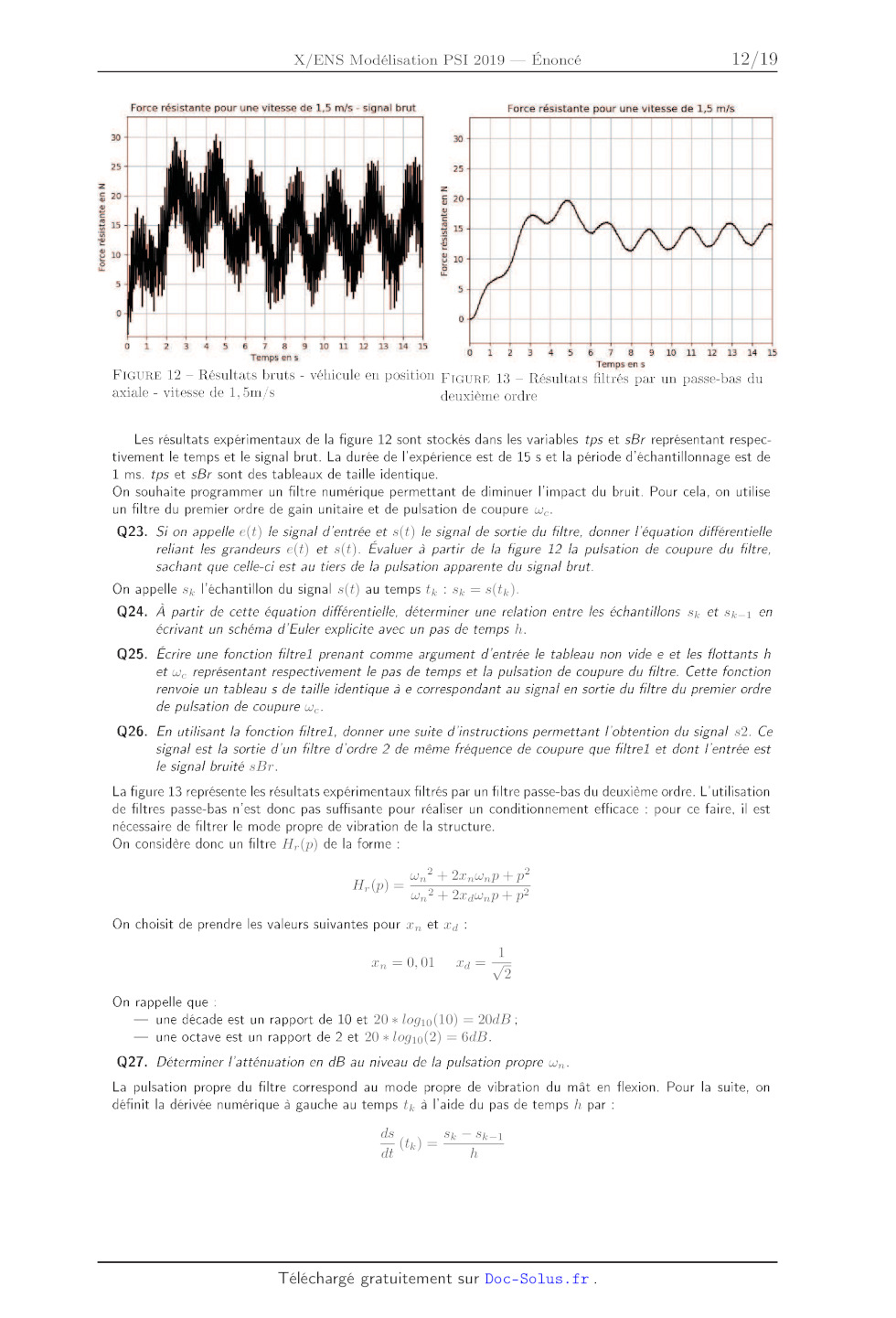
Les mesures brutes obtenues dans le cas d'une expérience avec un véhicule fixé
dans l'axe et une vitesse de
remorquage de 1,5 m/s sont représentées sur la figure 12. L'allure de la courbe
des résultats expérimentaux
montre la nécessité de conditionner le signal afin de rendre l'exploitation des
résultats possible. Nous pouvons
remarquer que le signal de la figure 12 est fortement bruité : il faut donc
mettre en place un filtre pour
améliorer la qualité de l'information.
Le conditionnement du signal se fera en post-traitement et l'on considèrera un
nuage de points qui sera
stocké sous forme de tableau. Un tableau est une structure de données dont
l'allocation est statique et
dont tous les éléments sont de même type. Le coût de création est linéaire en
la taille du tableau. Le coût
d'extraction d'un élément du tableau ainsi que l'accès à la taille du tableau
sont constants. Pour la suite du
sujet, le langage informatique Python ainsi que les bibliothèques numpy et
matplotlib.pyplot sont utilisés. I|
est possible d'utiliser également le type Jist ou le type numpy.array pour les
tableaux. Ainsi pour créer un
tableau tab de n valeurs nulles, il est possible d'écrire :
tab=n+[0] # en s'appuyant sur le type list tab=numpy.zeros(n) # en s'appuyant
sur le type numpy.array
Pour créer une matrice nulle mat de n lignes et de m colonnes, il est possible
d'écrire :
mat = [|] # en s'appuyant sur le type list
for i in (n) : mat.append(mx{0]) mat=numpy.zeros((n,m)) # en s'appuyant sur le
type numpy.array
10
Force résistante en N
Force résistante pour une vitesse de 1,5 m/s - signal brut Force résistante
pour une vitesse de 1,5 m/s
25 =
Force résistante en N
| T F 1 r T Fr T T r
ELEC LL EME | S ; ! 2 [ : S : , , ' , ,
"+ EL TT D LE D NN
Temps en s
Temps en s
FIGURE 12 -- Résultats bruts - véhicule en position FiGurE 13 -- Résultats
filtrés par un passe-bas du
axiale - vitesse de 1,5m/s deuxième ordre
Les résultats expérimentaux de la figure 12 sont stockés dans les variables tps
et sBr représentant respec-
tivement le temps et le signal brut. La durée de l'expérience est de 15 s et la
période d'échantillonnage est de
1 ms. tps et sBr sont des tableaux de taille identique.
On souhaite programmer un filtre numérique permettant de diminuer l'impact du
bruit. Pour cela, on utilise
un filtre du premier ordre de gain unitaire et de pulsation de coupure w..
Q23. Si on appelle e(t) le signal d'entrée et s(t) le signal de sortie du
filtre, donner l'équation différentielle
reliant les grandeurs e(t) et s(t). Evaluer à partir de la figure 12 la
pulsation de coupure du filtre,
sachant que celle-ci est au tiers de la pulsation apparente du signal brut.
On appelle s4 l'échantillon du signal s(t) au temps {x : sx = s(tx).
Q24. À partir de cette équation différentielle, déterminer une relation entre
les échantillons sx et sx_1 en
écrivant un schéma d'Euler explicite avec un pas de temps h.
Q25. Écrire une fonction filtrel prenant comme argument d'entrée le tableau non
vide e et les flottants h
et w. représentant respectivement le pas de temps et la pulsation de coupure du
filtre. Cette fonction
renvoie un tableau s de taille identique à e correspondant au signal en sortie
du filtre du premier ordre
de pulsation de coupure w..
Q26. En utilisant la fonction filtrel, donner une suite d'instructions
permettant l'obtention du signal s2. Ce
signal est la sortie d'un filtre d'ordre 2 de même fréquence de coupure que
filtrel et dont l'entrée est
le signal bruité sBr.
La figure 13 représente les résultats expérimentaux filtrés par un filtre
passe-bas du deuxième ordre. L'utilisation
de filtres passe-bas n'est donc pas suffisante pour réaliser un conditionnement
efficace : pour ce faire, il est
nécessaire de filtrer le mode propre de vibration de la structure.
On considère donc un filtre H,(p) de la forme :
Un? + 2Xqwnp + p?
H,(p) =
On choisit de prendre les valeurs suivantes pour x, et xa :
1
Zn = 0,01 xj = --
V2
On rappelle que :
-- une décade est un rapport de 10 et 20 x l{og10(10) = 20dB;
-- une octave est un rapport de 2 et 20 * log1o(2) = 6dB.
Q27. Déterminer l'atténuation en dB au niveau de la pulsation propre w,.
La pulsation propre du filtre correspond au mode propre de vibration du mât en
flexion. Pour la suite, on
définit la dérivée numérique à gauche au temps {4 à l'aide du pas de temps À
par :
ds Sk -- Sk_]
(4) = ES
7 Ur) F
11
Force résistante en N
La fonction rejet(e,h,wn) permet la mise en place numérique du filtre de
fonction de transfert H,(p). L'ar-
gument d'entrée e est un tableau de taille n représentant le signal d'entrée
non filtré, h représente le pas de
temps et w, la pulsation propre associée à ce filtre. La fonction renvoie un
tableau noté s correspondant au
signal en sortie de filtre.
Nous considérons le programme incomplet de la fonction rejet suivant :
def rejet (e,h,wn):
xn , xd = 0.01, 1/2*x%0.5
a2=(wnxh)+xx2
n = len(e)
s = n*|[0]
#Æ partie de la fonction non présentée
#
s[0]=a0/b0xe[0]
S[1]=(---b1xs[0]+a0+e[1]+a1xe[0])/b0
for i in (2,n):
s[i]=(--b1xs[i---1]-b2xs[i-2]+a0xeli]|+alxe[i--1]+a2+e[i--2])/b0
return S
Q28. On souhaite compléter la fonction rejet en calculant les coefficients 20,
a1, bO, b1 et b2 manquants. À
partir de la fonction de transfert donnée et en considérant la dérivation
numérique à gauche, déterminer
les valeurs des coefficients 20, a1, b0, bI et b2 en fonction de wn, h, xd et
xn.
Force résistante pour une vitesse de 1,5 m/s Evolution de la resistance en
fonction de la vitesse
18
30 _-
16 i
25 4 NA 4 4 4 J | | Û | | 14 4 -
x
2 T
12 -
20 - EUR ,
u
EUR 10- +
S +
m :
8 - à
d
U
5 6- +
F4
e
4 -
" ;
Tr F -- T FT '+ FT T FF FT 7 T Tr + O0 + T T T T T
0 à, à 3 4 5 6 7 8 9 210 11 LE LD 18 L 0.0 0.3 0.6 0.9 1.2 L5
Temps en s Vitesse en m/s
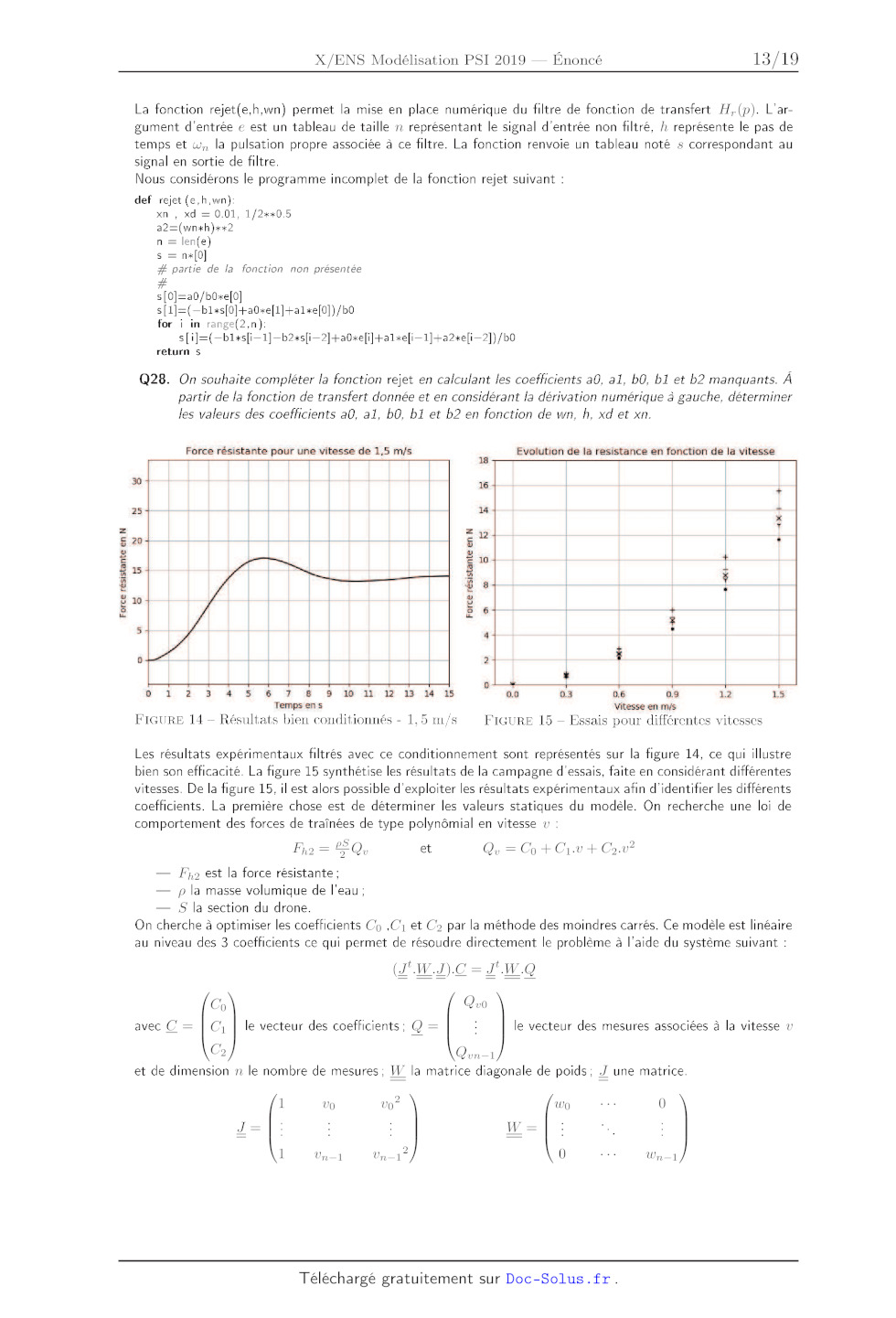
FIGURE 14 -- Résultats bien conditionnés - 1,5 m/s FIGURE 15 -- Essais pour
différentes vitesses
Les résultats expérimentaux filtrés avec ce conditionnement sont représentés
sur la figure 14, ce qui illustre
bien son efficacité. La figure 15 synthétise les résultats de la campagne
d'essais, faite en considérant différentes
vitesses. De la figure 15, il est alors possible d'exploiter les résultats
expérimentaux afin d'identifier les différents
coefficients. La première chose est de déterminer les valeurs statiques du
modèle. On recherche une loi de
comportement des forces de traînées de type polynômial en vitesse v :
Fh2 = PE Q et Qy = Co + C1.0 + Co.v°
-- F2 est la force résistante :
-- p la masse volumique de l'eau;
-- S la section du drone.
On cherche à optimiser les coefficients Co ,C1 et C2 par la méthode des
moindres carrés. Ce modèle est linéaire
au niveau des 3 coefficients ce qui permet de résoudre directement le problème
à l'aide du système suivant :
(JD). C = J'W.Q
Co Qv0
avec C = | Ci | le vecteur des coefficients ; Q -- : le vecteur des mesures
associées à la vitesse v
Co Qun--1
et de dimension n le nombre de mesures ; W la matrice diagonale de poids; J une
matrice.
I VO Vo? WU °* 0
J= |: | | W --
2
1 Un--1 Un--1 0 Un--1
12
Dans le cas présent, nous avons donc plusieurs groupes de mesures en fonction
des vitesses de 0 à 1,5 m/s
avec un pas de 0,3 m/s. Les valeurs de la force de résistance sont stockées
dans le tableau fh2 et celles de la
vitesse dans le tableau vh2 défini tel que :
vh2 = 5x[0 , 0.3, 0.6, 0.9 , 1.2 , 15]
Q29. Écrire une fonction jacob{T) avec un tableau T en argument d'entrée. Ce
tableau T est du même
format que celui de vh2. La fonction renvoie la matrice J du problème définie
plus haut.
Pour le calcul du poids w; S on s intéresse à la variance V; de l'ensemble des
points ayant la même
vitesse. Par exemple, w1 -- 7 est le poids du point d indice 1 avec l'ensemble
des points dont la vitesse est
de 0,3m/s.
On rappelle que la variance V d'un ensemble de données d; est définie par :
|
=
nm
V = (d; -- d)
Sir
SJ
Î
©
avec d la moyenne des d;.
Q30. Écrire une fonction variance(T) prenant en argument d'entrée un tableau T.
La fonction renvoie la
variance des valeurs du tableau. La complexité de la fonction doit être
linéaire en fonction de la taille
du tableau T.
On rappelle qu'à chaque valeur de vh2 correspond une valeur de fh2.
Q31. En utilisant la fonction variance, écrire une fonction poids(T,i) prenant
en argument d'entrée un tableau
T et un entier i. Le tableau T est du même format que le tableau fh2. La
fonction renvoie un flottant
représentant le poids w; de la mesure de l'indice i.
Q32. Le problème local est équivalent au système linéaire A.x -- bd. Expliciter
la matrice À, le vecteur x et
le vecteur b du problème en fonction de J, W, C et de Q.
Une fois les données À et b bien définies, il ne reste plus qu'à résoudre le
système pour déterminer les
coefficients qui nous intéressent.
13
5 Estimation de l'orientation, la vitesse et la position du véhicule
Pour pouvoir piloter le sous-marin, il est nécessaire de connaître sa position,
sa vitesse et son orientation
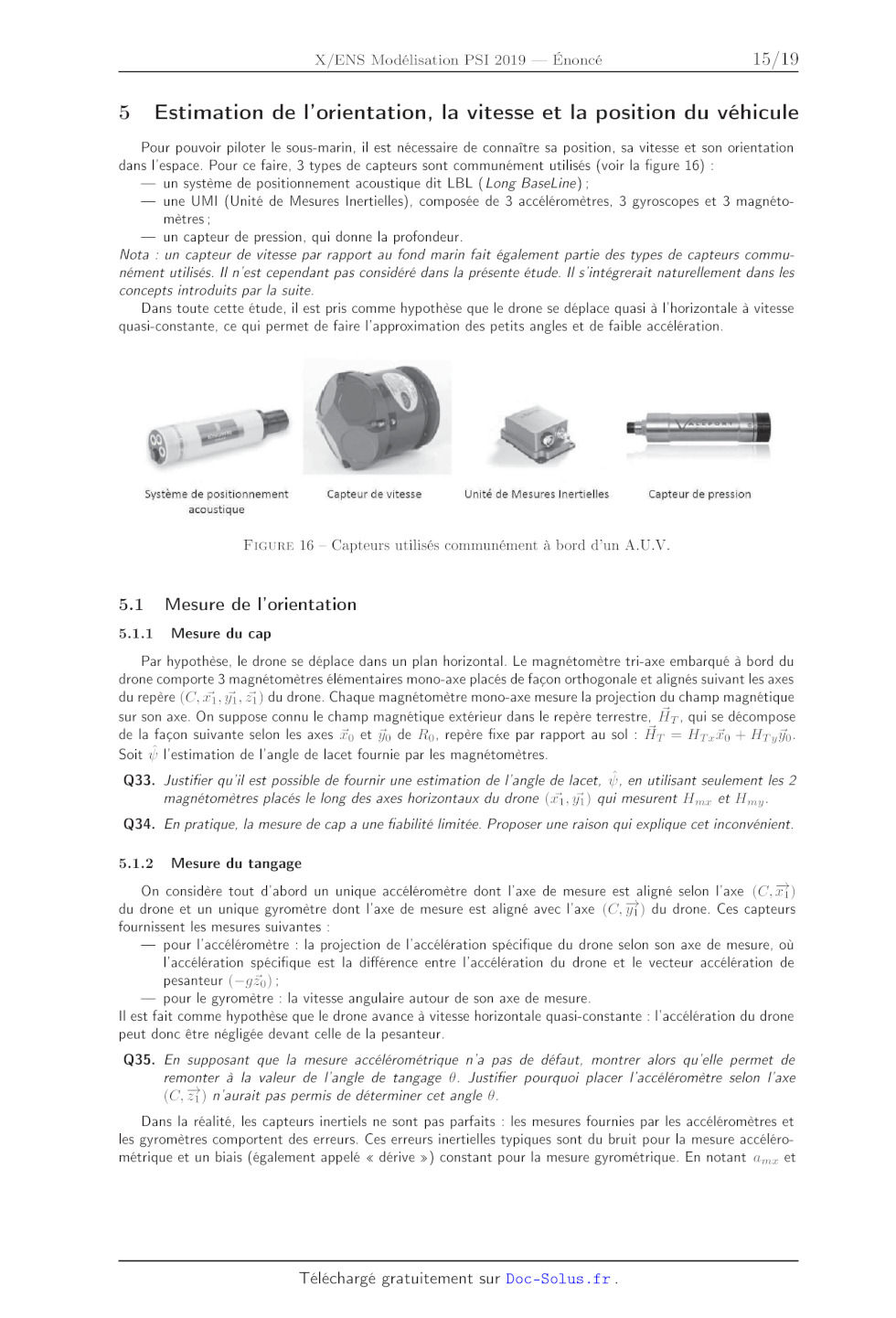
dans l'espace. Pour ce faire, 3 types de capteurs sont communément utilisés
(voir la figure 16) :
-- un système de positionnement acoustique dit LBL (Long BaseLine) ;
-- une UMI (Unité de Mesures Inertielles), composée de 3 accéléromètres, 3
gyroscopes et 3 magnéto-
mètres ;
-- un capteur de pression, qui donne la profondeur.
Nota : un capteur de vitesse par rapport au fond marin fait également partie
des types de capteurs commur-
nément utilisés. || n'est cependant pas considéré dans la présente étude. Il s
intégrerait naturellement dans les
concepts introduits par la suite.
Dans toute cette étude, il est pris comme hypothèse que le drone se déplace
quasi à l'horizontale à vitesse
quasi-constante, ce qui permet de faire l'approximation des petits angles et de
faible accélération.
MECTOUNT
Système de positionnement Capteur de vitesse Unité de Mesures Inertielles
Capteur de pression
acoustique
FIGURE 16 -- Capteurs utilisés communément à bord d'un A.U.V.
5.1 Mesure de l'orientation
5.1.1 Mesure du cap
Par hypothèse, le drone se déplace dans un plan horizontal. Le magnétomètre
tri-axe embarqué à bord du
drone comporte 3 magnétomètres élémentaires mono-axe placés de façon
orthogonale et alignés suivant les axes
du repère (C, 1, y1, Z1) du drone. Chaque magnétomètre mono-axe mesure la
projection du champ magnétique
sur son axe. On suppose connu le champ magnétique extérieur dans le repère
terrestre, Hr, qui se décompose
de la façon suivante selon les axes xo et ÿo de Ro, repère fixe par rapport au
sol : r = Hrz:%o + Hryÿo.
Soit 4 l'estimation de l'angle de lacet fournie par les magnétomètres.
Q33. Justifier qu'il est possible de fournir une estimation de l'angle de
lacet, 4, en utilisant seulement les 2
magnétomètres placés le long des axes horizontaux du drone (x1,y1) qui mesurent
H,; et Hyy.
Q34. En pratique, la mesure de cap à une fiabilité limitée. Proposer une raison
qui explique cet inconvénient.
5.1.2 Mesure du tangage
On considère tout d'abord un unique accéléromètre dont l'axe de mesure est
aligné selon l'axe (Ci)
du drone et un unique gyromèêtre dont l'axe de mesure est aligné avec l'axe (C,
Yi) du drone. Ces capteurs
fournissent les mesures suivantes :
-- pour l'accéléromètre : la projection de l'accélération spécifique du drone
selon son axe de mesure, où
l'accélération spécifique est la différence entre l'accélération du drone et le
vecteur accélération de
pesanteur (--g20) ;
-- pour le gyromètre : la vitesse angulaire autour de son axe de mesure.
l'est fait comme hypothèse que le drone avance à vitesse horizontale
quasi-constante : l'accélération du drone
peut donc être négligée devant celle de la pesanteur.
Q35. En supposant que la mesure accélérométrique n'a pas de défaut, montrer
alors qu'elle permet de
remonter à la valeur de l'angle de tangage 0. Justifier pourquoi placer
l'accéléromètre selon l'axe
(C, 71) n'aurait pas permis de déterminer cet angle 6.
Dans la réalité, les capteurs inertiels ne sont pas parfaits : les mesures
fournies par les accéléromètres et
les gyromèêtres comportent des erreurs. Ces erreurs inertielles typiques sont
du bruit pour la mesure accéléro-
métrique et un biais (également appelé « dérive ») constant pour la mesure
gyrométrique. En notant a, et
14
Im respectivement la mesure de l'accéléromètre et celle du gyromètre, le modèle
considéré en introduisant ces
défauts est le suivant :
Amx -- --90 + Ea
Am = Ô + qu
où EUR, correspond à du bruit haute fréquence à forte intensité et q, est une
constante, appelée dérive gyrosco-
pique (typiquement q, = 0,01°/5s).
Q36. Justifier simplement que l'exploitation de la mesure accélérométrique
seule ne permet pas de déterminer
le couple recherché {0 ; q = 0}. Justifier que l'exploitation de la mesure
gyroscopique seule ne le
permettrait pas non plus.
Afin d'estimer correctement les grandeurs Y et q qui servent dans les lois de
contrôle, on utilise un algorithme
de fusion de données appelé « observateur ». Cet algorithme utilise à la fois
les mesures accélérométriques et
les mesures gyroscopiques, entachées de leurs erreurs, pour estimer ÿ et q de
manière suffisamment précise pour
que les lois de contrôle puissent les exploiter (ces lois de contrôle
requièrent des mesures faiblement bruitées
et sans dérive). L'observateur Obso, utilisé ici pour le tangage, est illustré
sur la figure 17. Les variables Ô et
4 sont les estimations de Y et q fournies par l'observateur Obs,. Les équations
de l'observateur Obs, sont les
suivantes :
: dô
au 1 de -- li(Amx + 90)
: dû
à = 2 = l(ame + 90)
4 = Gm -- 4
où l1,l2 sont des constantes.
D>
Ur -------- -------->>
Obs,
Im ----
RQ >
FIGURE 17 -- Schéma entrées/sorties de l'observateur Obsg
Les erreurs de l'estimateur sont eo -- 0 -- 0 pour l'estimation du tangage et
e, = Q, -- q pour celle de la
dérive.
Q37. En ne considérant pas le bruit accélérométrique EUR,, donner l'équation
différentielle régies par eg en
fonction de g,l:,l2. Donner également celle entre e, et ea.
Q38. En déduire les conditions sur l: et l2 pour que l'observateur estime
asymptotiquement le tangage 0
sans erreur.
Q39. Montrer que l'observateur estime asymptotiquement la dérive sans erreur
pour ces mêmes conditions
sur l et l2. En déduire qu il permet d'estimer également la vitesse de rotation
q sans erreur asympto-
tiquement.
Q40. En utilisant la notation de Laplace aux équations de l'observateur, donner
la fonction de transfert entre
la transformée de Laplace du bruit e,(p) et celle de l'erreur de tangage eo(p)
en fonction de g, li, lo.
Q41. Grâce à une comparaison de fonction de transfert, justifier que
l'observateur permet également de filtrer
le bruit sur l'estimation de 0 par rapport à l'estimation qui aurait été
effectuée à partir uniquement de
la mesure accélérométrique : 0 -- TR.
5.2 Estimation de la vitesse verticale et de l'immersion
Dans cette partie, on cherche à estimer la vitesse verticale et l'immersion du
drone, respectivement w et
z. Le système de positionnement acoustique LBL et le capteur de vitesse ne sont
pas utilisés car leur précision
n'est pas suffisante pour les besoins de cette chaîne verticale du drone. Pour
ce faire, deux autres capteurs
sont donc utilisés. Tout d'abord un accéléromètre dont l'axe de mesure est
aligné selon l'axe (C, 77). Cet
accéléromètre fournit a, la projection de l'accélération spécifique du drone
selon son axe de mesure, où
l'accélération spécifique est la différence entre l'accélération du drone et le
vecteur accélération de pesanteur
15
9. La mesure du capteur d'immersion est également utilisée : z,,. Compte tenu
de l'approximation petits angles
faite, le système global d'équations s'écrit :
LU OET%
._ dz
=
Amz = Az -- (2)
Zm = À
où a, est l'accélération verticale du drone et g(z) la composante verticale de
la pesanteur d'équation g(2) = g0 + k.z
où g0 et k sont des constantes. Compte tenu des imperfections des capteurs, une
approche similaire à celle
étudiée au paragraphe 5.1.2 est utilisée, avec un observateur Obs, fournissant
les variables wù et 2 estimées
de w et z.
Q42.
Q43.
Q44.
Q45.
9.9
Donner les entrées et sorties de l'observateur Obs, de facon similaire à la
figure 17.
Ecrire les équations de l'observateur Obs, en faisant intervenir 2 nouvelles
constantes : l3, la.
Montrer que cet observateur permet d'estimer asymptotiquement la vitesse et la
position sans erreur,
avec des conditions sur l3 et l4 à expliciter.
Lorsque le capteur d'immersion n est plus disponible, montrer que l'estimation
d'immersion diverge
avec une constante de temps T qui sera donnée en fonction de k.
Estimateur de la vitesse et de la position horizontales
Le drone se déplace à l'horizontale. Afin d'estimer la vitesse et la position
horizontales du drone dans le
repère Ro fixe par rapport à la terre, les mesures des accéléromètres
horizontaux combinés avec le système de
positionnement acoustique LBL sont utilisés. Ce système de positionnement est
constitué de transpondeurs
posés sur le fond, autour de la zone d'opération (jusqu'à 10 km), et dont on
connaît précisément les positions
absolues. Le drone sous-marin émet un signal acoustique (ping) et mesure le
temps de propagation des signaux
émis en réponse par les transpondeurs. Par triangulation, le véhicule peut
ainsi déterminer sa position. Ce
principe est illustré sur la figure 18, où le drone À communique avec les
transpondeurs B, EUR et D.
FIGURE 18 -- Principe du positionnement acoustique LBL
Q46. Donner 2 inconvénients ou limitations de ce principe de positionnement.
Q47. En supposant que les conditions de bonne utilisation sont remplies,
combien de balises doivent au
minimum être déployées pour que ce système fonctionne ? Justifier.
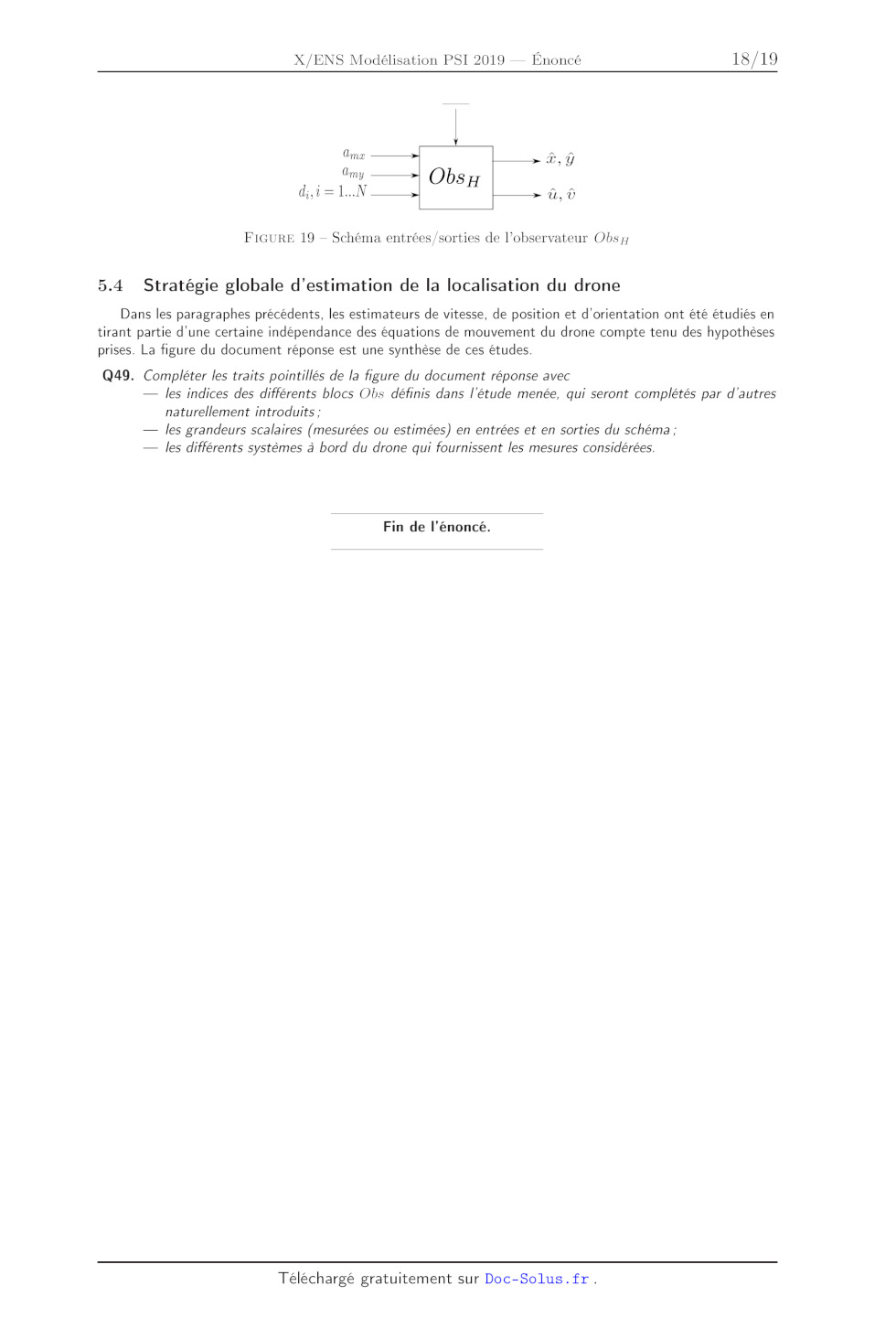
En analogie avec la chaîne verticale étudiée dans le paragraphe 5.2, un
observateur Obs7r est utilisé pour
estimer les vitesses et positions horizontales dans le repère Ro fixe par
rapport à la terre. Comme illustré sur
la figure 19, cet observateur combine les mesures des accéléromètres
horizontaux (@x, Gmy) et les mesures
des N transpondeurs (d;, 1
my -- Obs
di=1N H
&)
>
©)
>
---- 1
1
FIGURE 19 -- Schéma entrées/sorties de l'observateur Obsyx
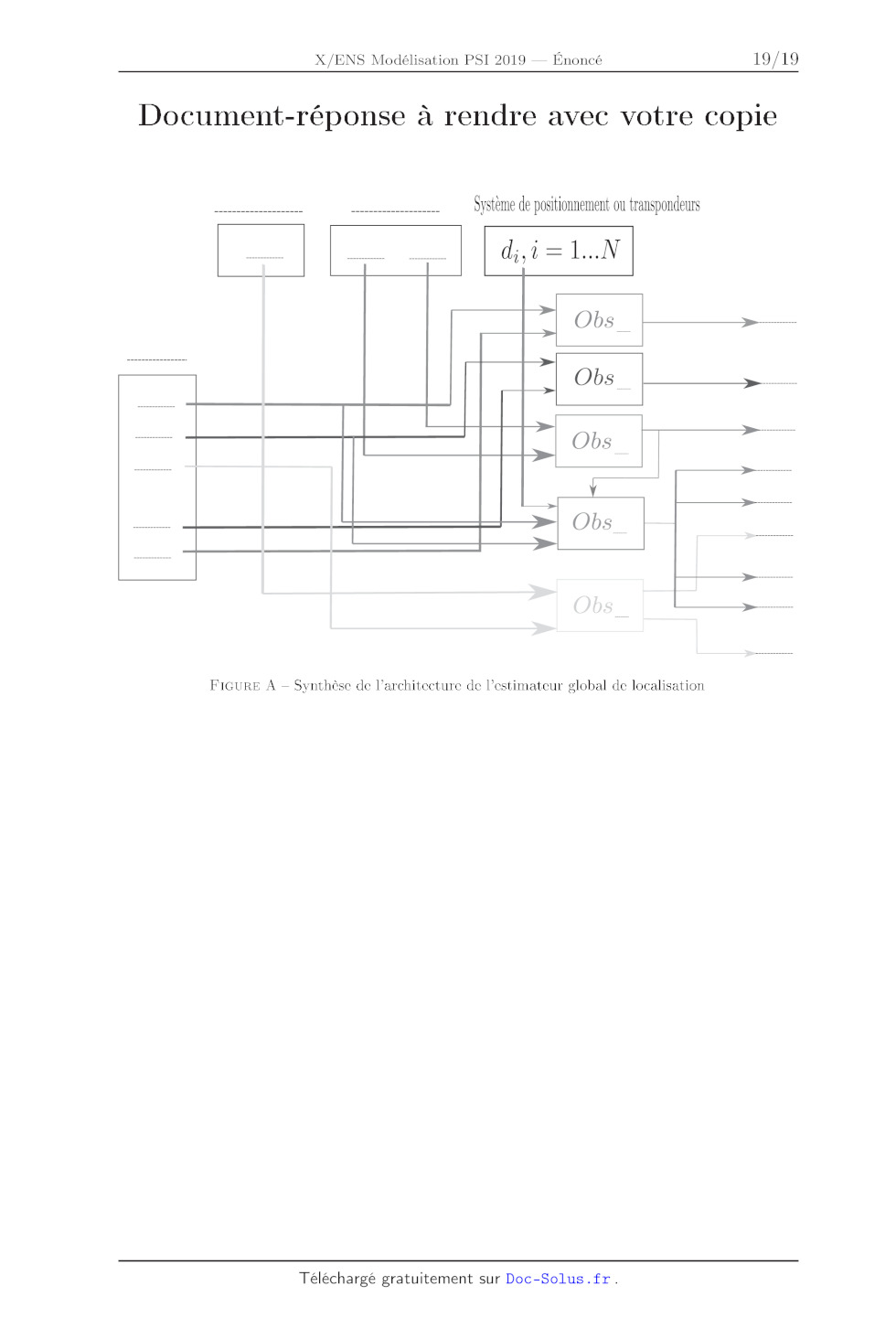
5.4 Stratégie globale d'estimation de la localisation du drone
Dans les paragraphes précédents, les estimateurs de vitesse, de position et
d'orientation ont été étudiés en
tirant partie d'une certaine indépendance des équations de mouvement du drone
compte tenu des hypothèses
prises. La figure du document réponse est une synthèse de ces études.
Q49. Compléter les traits pointillés de la figure du document réponse avec
-- les indices des différents blocs Obs définis dans l'étude menée, qui seront
complétés par d'autres
naturellement introduits ;
-- les grandeurs scalaires (mesurées ou estimées) en entrées et en sorties du
schéma ;
-- les différents systèmes à bord du drone qui fournissent les mesures
considérées.
Fin de l'énoncé.
17
Document-réponse à rendre avec votre copie
Cd Système de positionnement ou transpondeurs
FT di i=1.N
| Obs. D
s Obs ... D
>- D
TT Ta Obs
nn > . nn.
.
-- _--_--_--__ >| Obs
de TL >-
FIGURE À -- Synthèse de l'architecture de l'estimateur global de localisation