
X/ENS Modélisation PSI 2018
| Thème de l'épreuve | Bras exosquelette haptique |
| Principaux outils utilisés | électricité, électronique numérique, induction, asservissement, mécanique, représentation des nombres |
| Mots clefs | déformation, capteur de couple, pont de Wheatstone, échantillonnage, repliement de spectre, critère de Shannon, erreur de quantification, rapport signal sur bruit, conversion binaire, codeur inductif, haptique, exosquelette |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)


Énoncé obtenu par reconnaissance optique des caractères
!" !#
$#%&
!
! "
# % %
# % "" "
"" & '"%
( " %
# & '" " )
*
" " "
""" "
"
+
, "
"
( " &"
" &"
" , #./0
( "' "
% .% # " " 1
" " &"
2 3 %
%
& %
4,"% % 5 "
% 6" 8
% %
" 9 :9 :
.
# ! "# 7
" )
! # # # ! !!
5!3 6 !!5 6
! $ %! * ! # '"'#
!3 #! ! %!
&# $!
# !3 #2 ! 84 !
9 2 ! 84
& !! "
+ ! # !3
#: ! !
! & #
!3 & ! ! !3 & !
& # ! #
+ ! $ %!
! ! "
/ ( !
;$! !3 "#! !
$ %! * !! 3
& &
.
!
/
!! $ %! ! & &!
& < ! ! ! ! ! + & = !! = / ! & + ++ + = ! > ! ! ! >
< : # $ %! # ;# #! 7 ! # + ; ! ! # & & # / = ? ! 9 "$ ! = ! ( ! ! & & & @ ? > !
?
> !
! ,
& ,
! & ,
! & ,
!/ ! !
"/ ! @ ? > ! ? > !
+
+
++
! 9 !3 # $ '
A ! B CDE B FCDGHIC B JKH B LMCNOPQCGH B QG B FKREHC B CE B CNSPTIC B
OPFFC
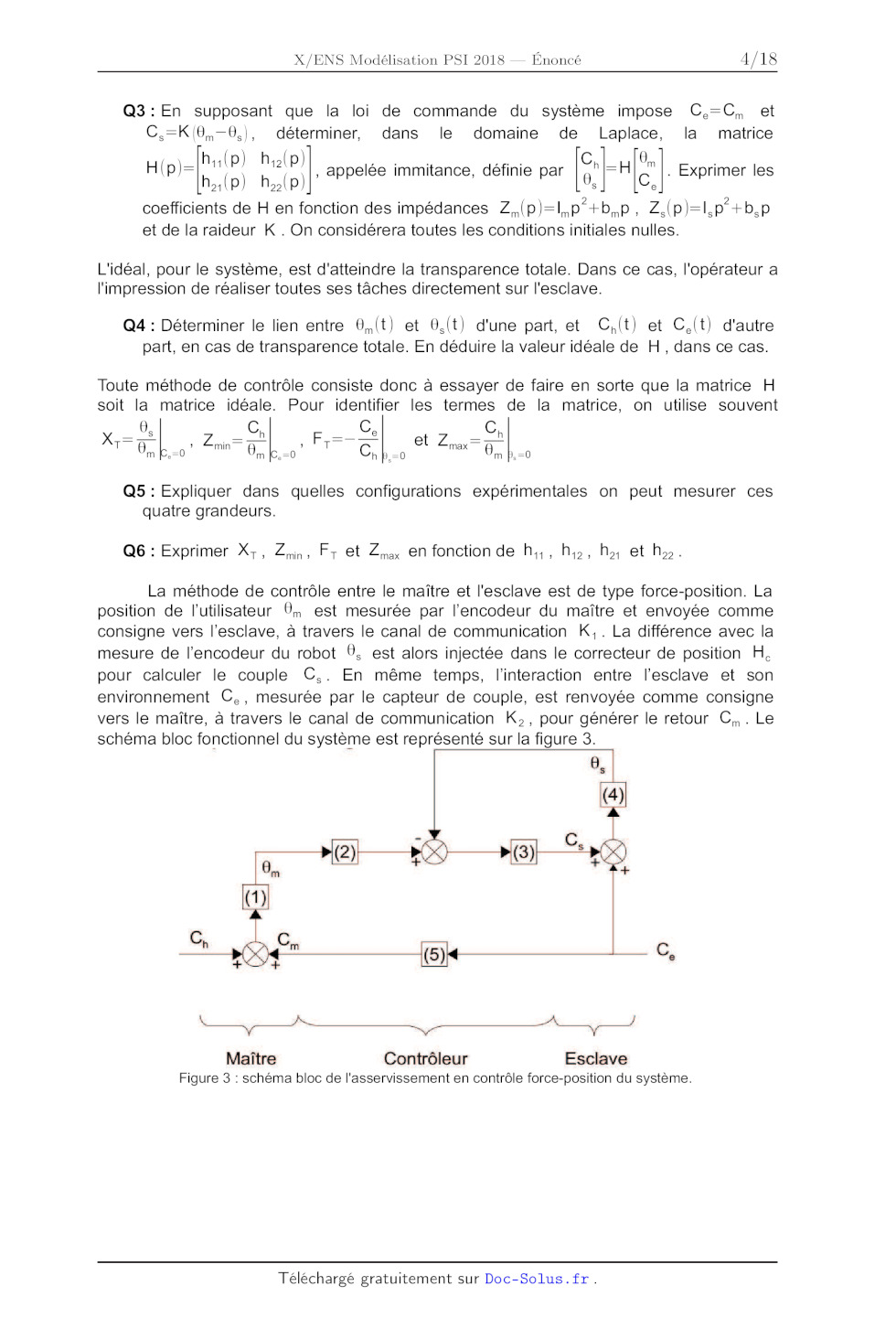
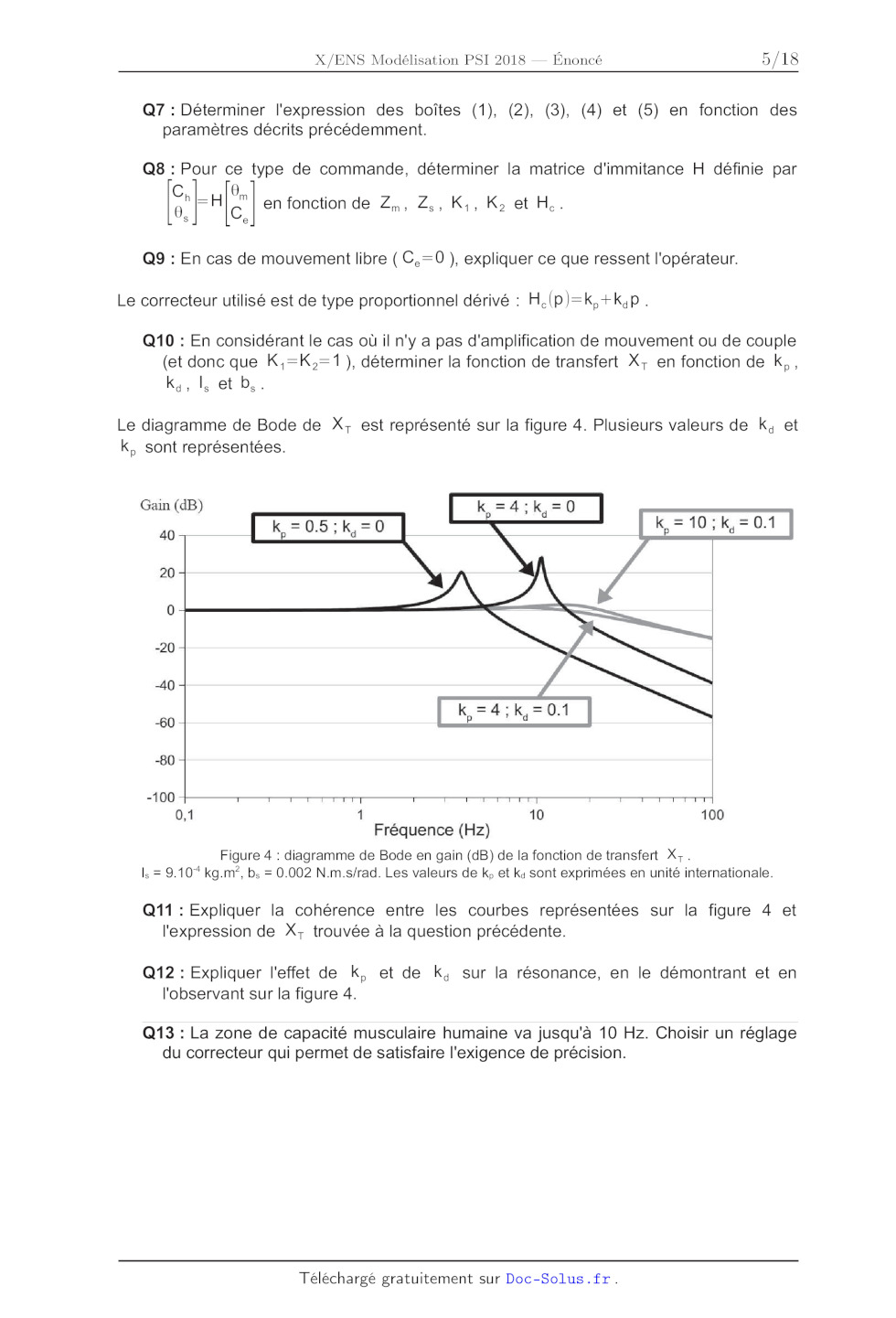
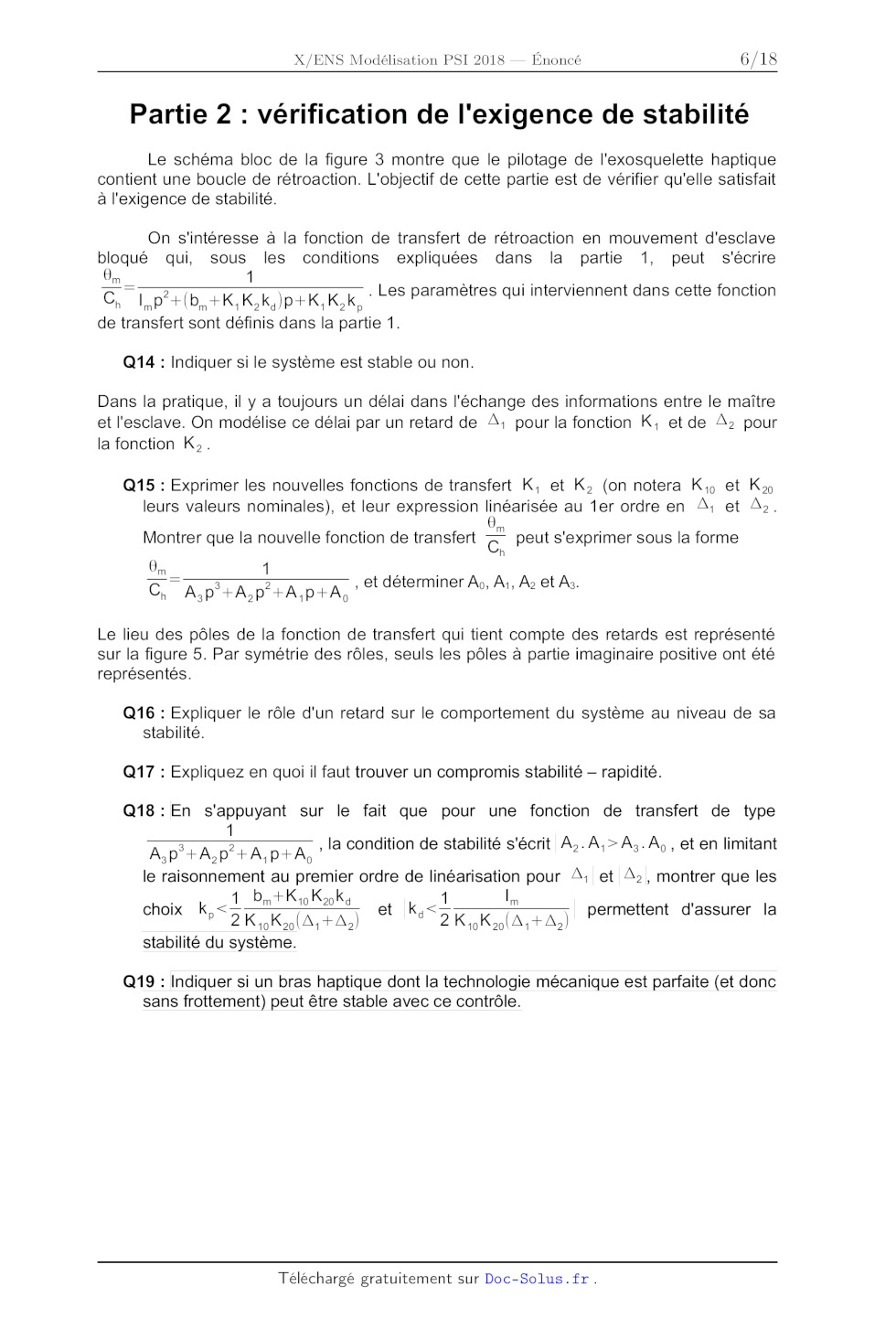
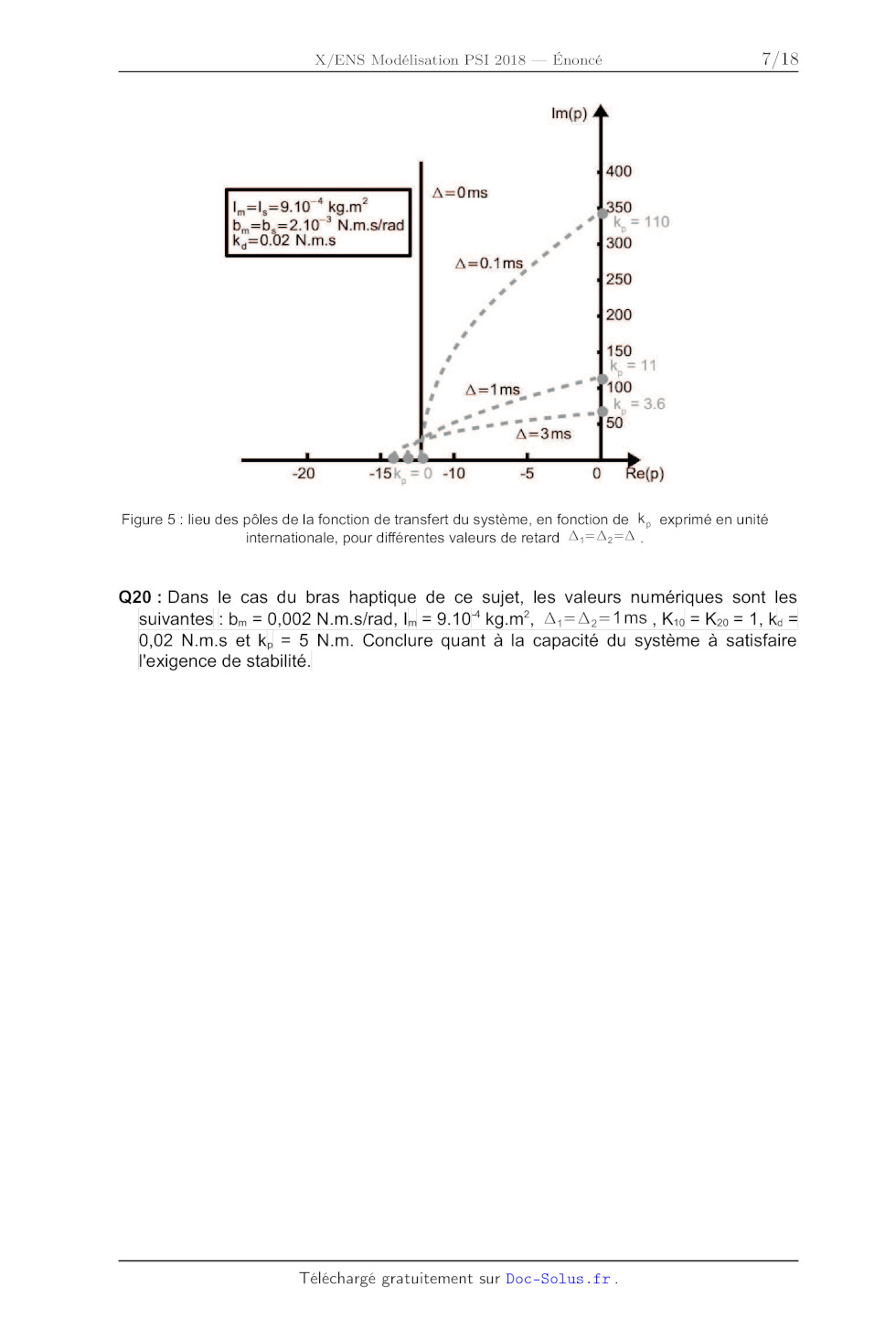
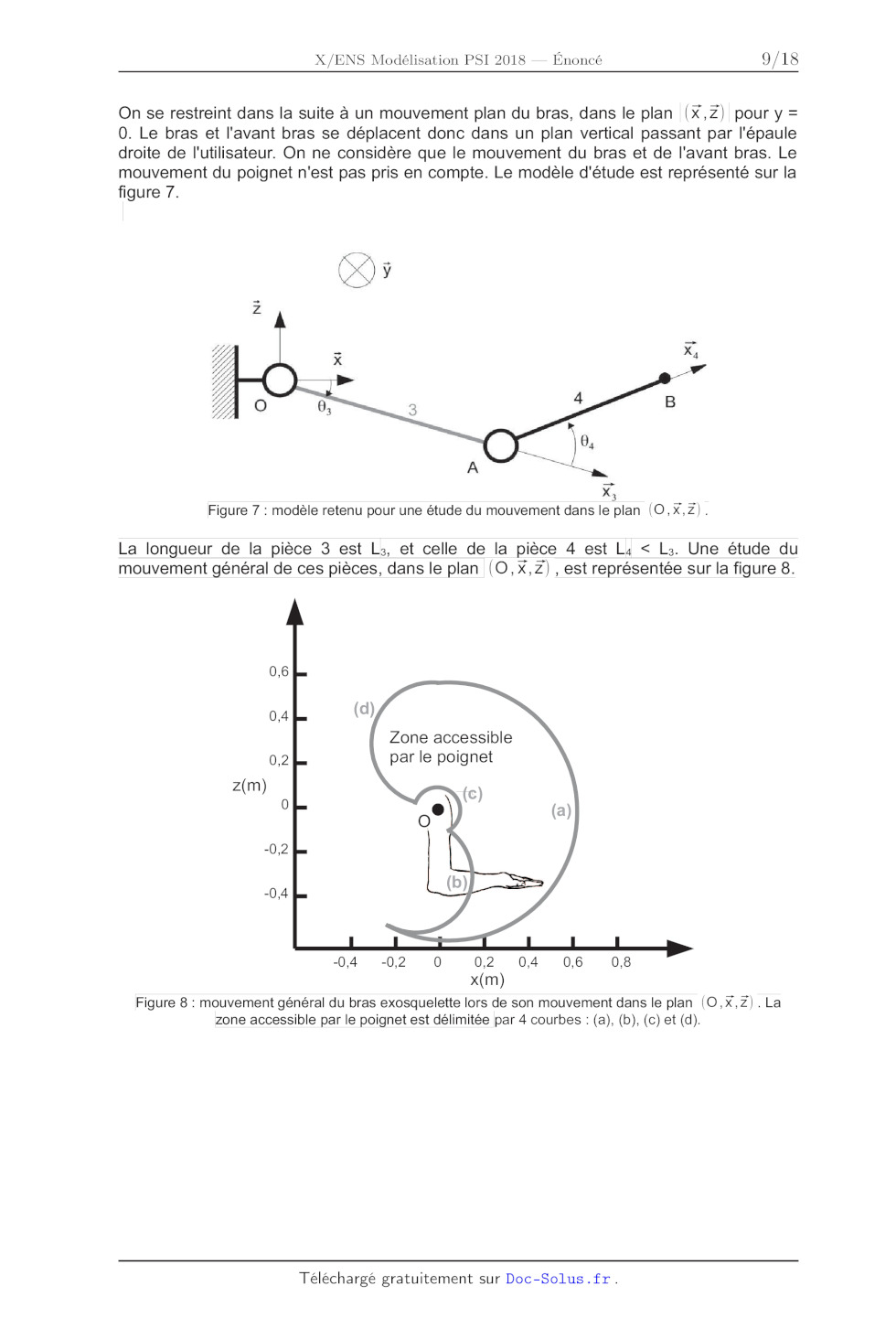
OPNDUVNCBSCHDBLMCDOLKSCWBXBEHKSCHDBLCBOKNKLBQCBOPFFGNUOKEUPN B < YBZKBQU[[IHCNOCBKSCOBLK !A B CDEBKLPHDBUN\COEICBQKNDBLCBOPHHCOECGHBQCBJPDUEUPN B = & Y B ]N B F^FC B ECFJDW B LMUNECHKOEUPN B CNEHC B LMCDOLKSC B CE B DPN ! & WBFCDGHICBJKHBLCBOKJECGHBQCBOPGJLCWBCDEBHCNSPTICBOPFFCBOPNDUVNC SCHDBLCBFKREHCWBXBEHKSCHDBLCBOKNKLBQCBOPFFGNUOKEUPN B < + WBJPGHBVINIHCHBLCBHCEPGHB & ! ! $ %! . . ! #! 9 ' 0 $ %! #; ! # 3 24 2+4 2.4 204 2_4 !% !! $( $ !! ! ! #!! = & = ! > ! > < < + = & %/! ! 2 & , 4 # $ = ` ` &/ a#$ #! ! ! 2 < < + 4 ! @ ? ` ` !!b @ ? 0( ` ` 0 !!b 2b4 @ ? c,'0`!+c,,,+d!` ` ! / 0 # @ ? " / # ` ` ! # 0 e ! !#",=e& ! # _ ' ! .! # # # "# :# " ! ! # # ! !% + & !< < + ` < < + ` ! $ %! ; $ # ! !3 #:! < + < + !/ ! < < + 2 < , < +, !4 + ! 1 # ! ! & ! & f . .f + +f f , !f,ff+ f. 9 ! _($! 9 9" ! "/ 9# ! ! $ %! #/ e ! ! g $/ # $ $ # f + f f . f , ! . f . f + +f f , ! ! + ! ! < , < +, ` ! ` ` ! # + < , < +, + + < , < +, + $ %! % ! 2 ! 4 * 9 h _ 9 $ %! ` ! + &; ! !c,,,+d! ! c,'0`!+ + ! <,c<+,c`c ,,+d! ` c_d!& " $ %!" # i ( )( # ! $! ZCBOPHJDBjGFKUNBCDEBOKHKOEIHUDIBJKHBGNCBQUDDTFIEHUCBCNEHCBDCDBkKNQCDBJKDDKNECDBFPEHUOC CEBDCNDPHUCLLCYBlPGHBLCBkHKDWBLKBkKNQCBJKDDKNECBFPEHUOCBCDEBLUFUEICBXBmGCLmGCDBnCHEoBEKNQUD .,=e ` 2 !4 0,,=e 2 4 " h ! ! ! h # , # ! i %& % i #$ # !; !$ 2 # 4 # 2 4 # !2 4 % # # & !. # )h %,+. 0! % %. %0 # & ! ! % !! h $ %!i # '"' ! % ; % % ! ! * "i p : "! ! e $c , # # # : %! ! # ! ! # ! ! %# i i ! % ! ! : e % . . % 0 0 q . r ! ! % : e p ,h ,0 *+ >
,+
e2!4
*+
,
*+
:
',+
*'+
',0
',0
',+
,
,+
,0
,h
,p
2!4
p ! ! ! ! : e
e ! 0 242424 24
"! ! #
242424 24
!
! !
! !!5! 65 !65!
6 52! 46
% . ! !. s. : s.
f . . ,
! # s. s . . b. ,
,
, &.
.
!0 s 0 f s0
f0 , ,
s 0 , b 0 ,
, , &0
0
.
+ .
%0!
. $ e.
0
! # s 0
+ 0
e ! % !
0 $ e0
i
"; ! ! : ! f
!
e e # b fb 0 0 ; !
! f %0 ! 2 !
! 4/ !
%
s7" ! "# * !
!*! $ !
! ! !
! ! ! !
! !
,
e2!4
_
,
_
; !
!
,
'_
(
',
'_
',
'_
,
_
,
_
2!4
! ! : e # ! ! #
! #!!
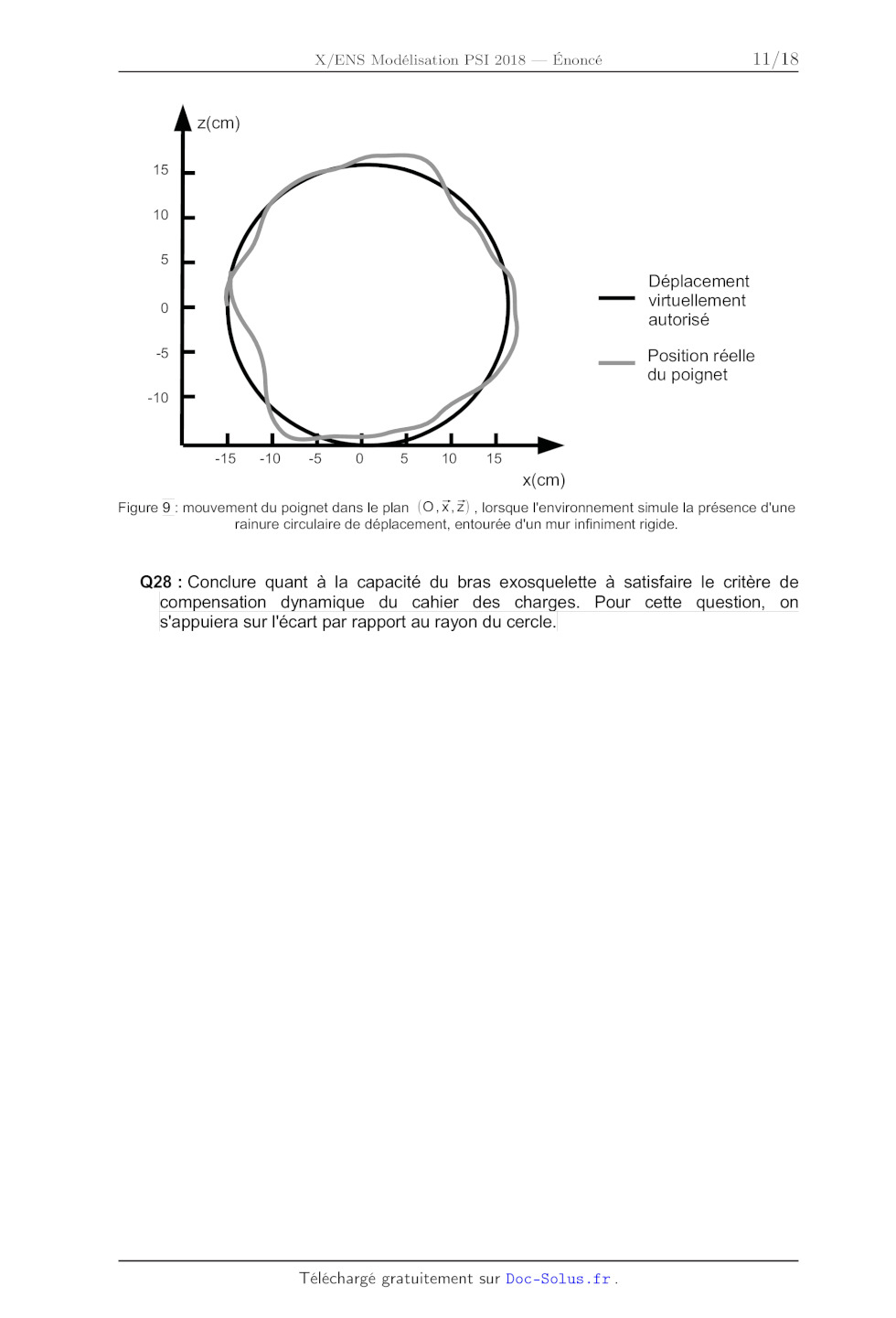
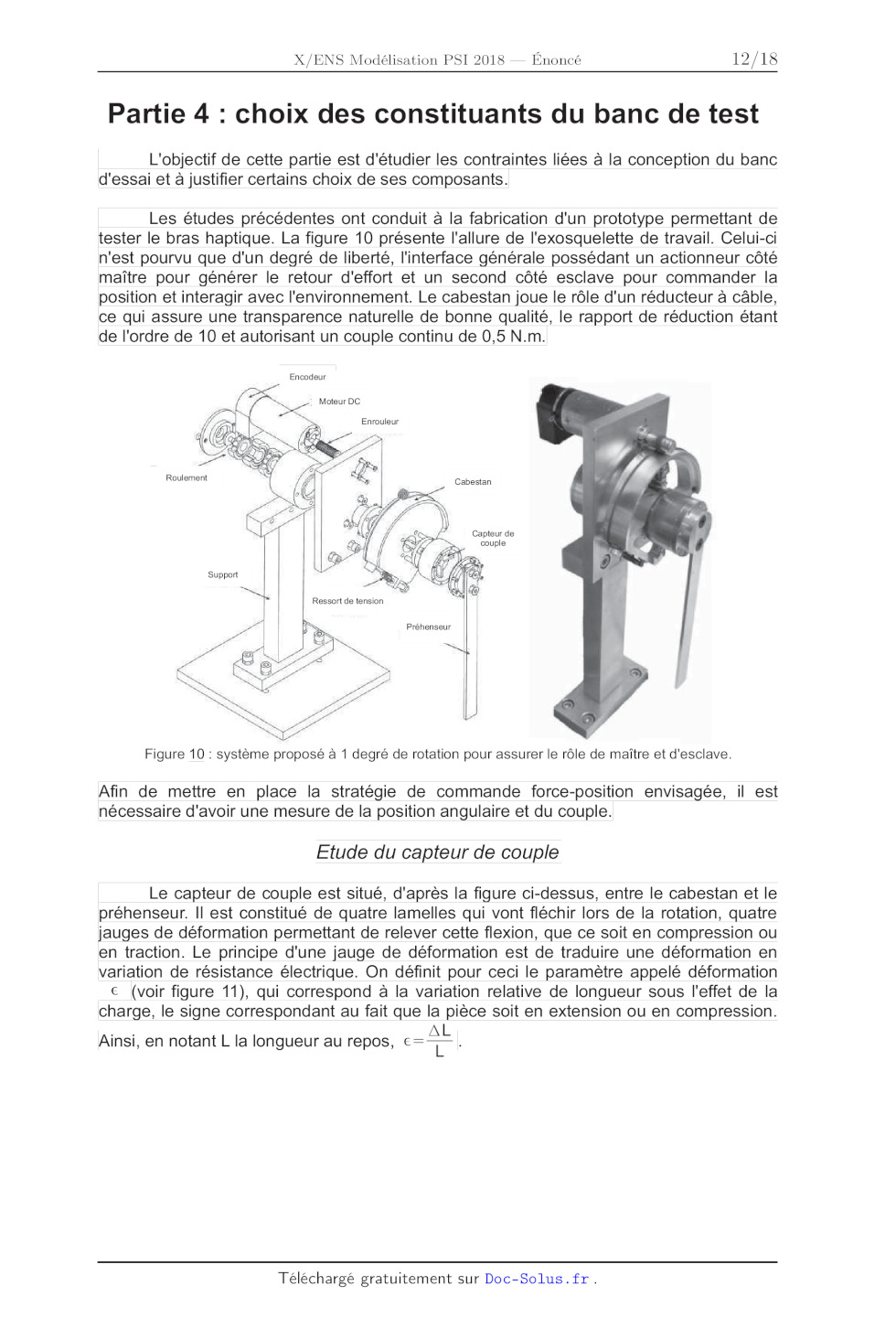
$& " " %
! $! (
# #
$
'
# # "
# " !
" #
$ !
,
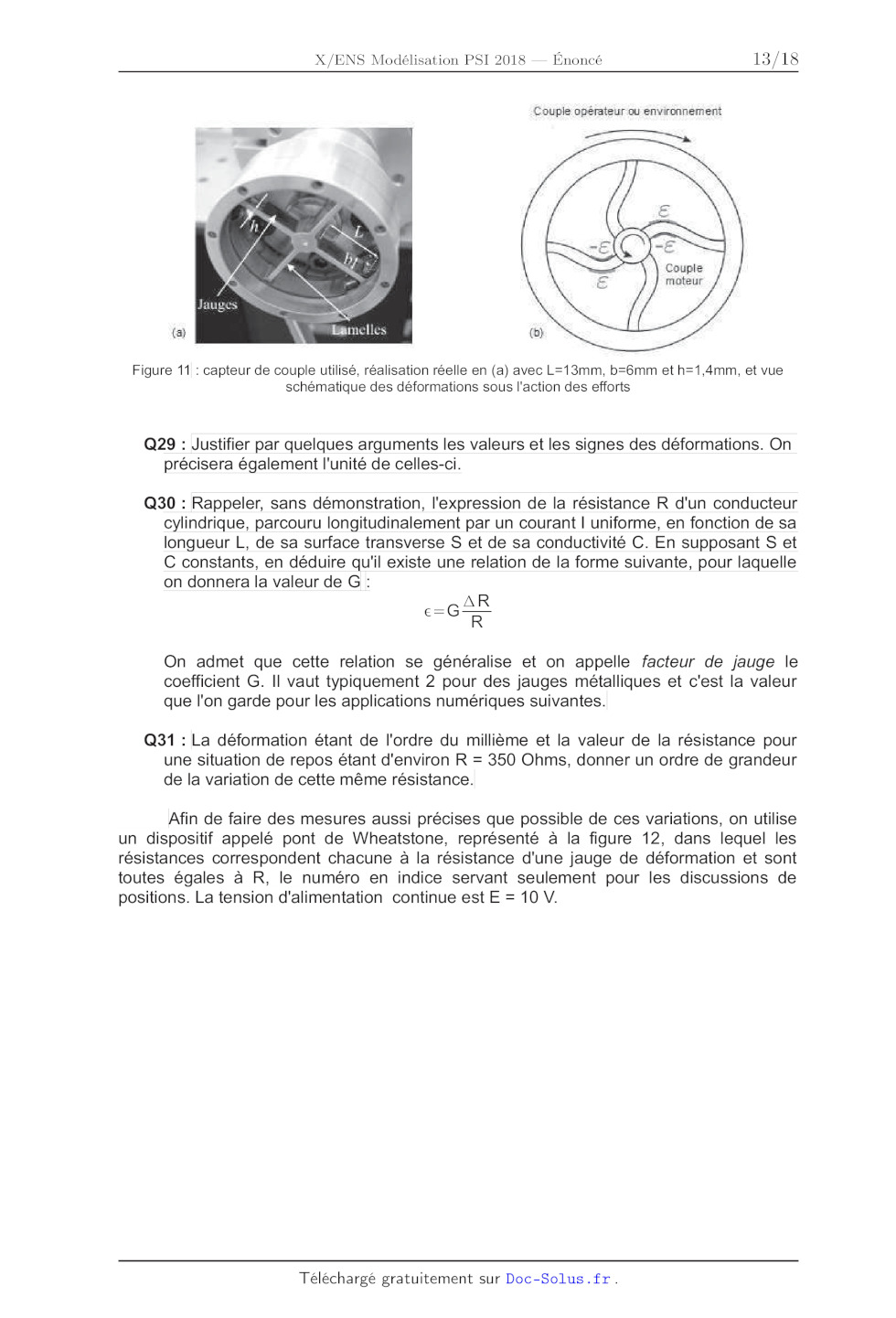
# # # 9
!3 # 9 !!
# ! 9# "7
# , ,_d!
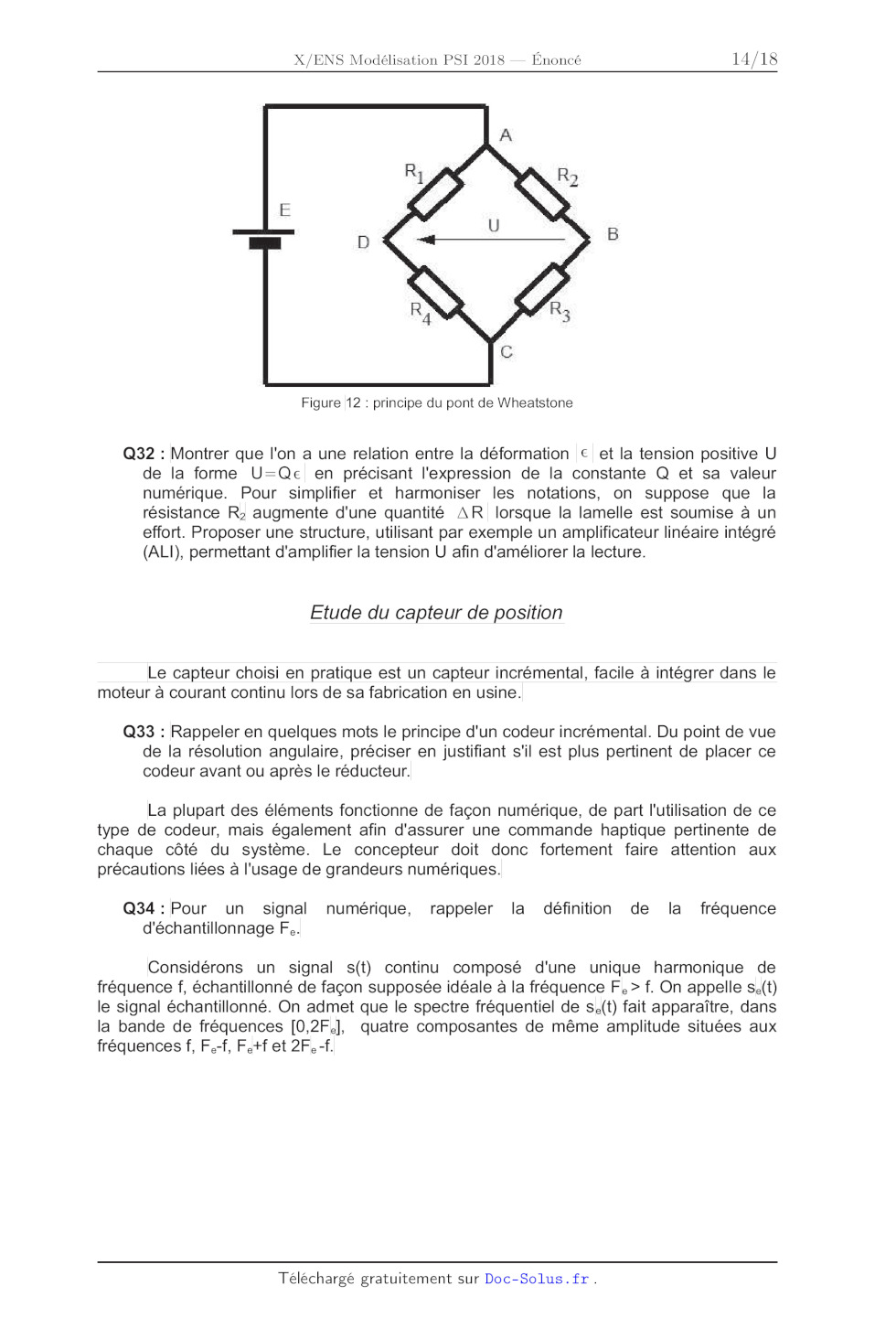
/
1 ;&
/
t !
&
&
)
t
(
, $ %!
"
9!3 #
f ! !! '
# !
# %'
!
! ! !
# ! !
: !% !
2 4 " #
% !
f
+
24c.!!ch!! c0!!
! ! #
%u ! ! :
! # '
&t ! # t#
$ ! !
) &/
)
& # !
s
t
s
t
: !
s $ ! + ! #
# !
! # !%!
# tc._,: !
!*!
f!
v " +
" # !
" t ! !
#! /c,w
.
+
v
1 # ! r
! rx # x
! ( ! !
t+ ! # t ! !"
(
! !
2f 4 ! #! r#!
! "
! "
t ! # ! ;
#
%
! y ! #
$ !! # !!
9 $ %! !
"#!
( !
#
& 2 4 ! # !
y
" z: 2 4
:! 2 4 3
{,+ | ! !*!!
'} +'
0
!( y # 2 4
#! { !1|
1q0/ ! #
7" '
# :! ! !
! # $ ! ! d !!
!% a #
";# . 5
JKDDKNEC B FPEHUOC B CDE B LUFUEIC B X B mGCLmGCD B nCHEo B EKNQUD B mGC B LK B
kKNQC B JKDDKNEC
., =e ` 2
!4 0,,=e 2 46
"
( `
! # !
%! ! ! :
!
'
.' ! 3 ( $!1
& '
% : !
e
& ! 7" !
p 24 * 2#
4 # ,,,,,,,, '24 ,,,,,,,2+4
,,,, ,,, # *
!
#/ ! 1 ( 24( #
24 ;
!d ! 2 4
$# !!#
# '"'c' ; #
%:
! ! !!
# " /
! $#1 '
+
(
+
_
.
& ! ! 2 4
#! 1 ! $; )
(/
t
!!
)
t +
/ d !
d ! t t bc, 2t4
; # !
2+4c,., 2.4c,0p(
!! !% #
$
#! p,b& ! !!
!
h
:# !"# (
%# y @ # 3 !% (:
# h ;
($ * ! !!
! :
# !*!# # " '
(
(,,(*-.+ ($ $ -
! # $ @' {'1}1|
"}1 '1 @
*-.+ ($ $ - !
(
# $ ! 2 ! # %. '+
}+4 "@ "
:
# #
# '"'
} e 2h + 4
' e f !
# ' +'+ .
(
, *-.+($ $ - !
# $ # !
,'*-.+ ($ $ -
!(
! # $ h !
3 % "# -
"& !!
! #
%#
i
( ! ! #
$ %! ! !! !
#/ %! #
9 !
r b t
"
/ !
# b; #!
!# b ) b)+/
#b)
#b)+
+ + / 1
! bt :
! :! r r+ !
! b
b 1 %
$t !$ %!
%/ r r+
!&/ !! ! "
1
1
"
!& !
p
/((
! % /? /t"
#r b
0123/45
/((
! % /? /t"
#r b
0123/45