
X/ENS Physique PSI 2005
| Thème de l'épreuve | Imagerie radar par satellite |
| Principaux outils utilisés | mécanique du point, gravitation, formule de Fraunhofer, interférences à deux ondes |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - -
Énoncé complet
(télécharger le PDF)



Énoncé obtenu par reconnaissance optique des caractères
SCIENCES PHYSIQUES
DURÉE: 4 HEURES
Aucun document n 'est autorisé.
Pour les épreuves d'admissibilité, l'usage de calculatrices électroniques de
poche & alimentation
autonome, non imprimantes et sans document d'accompagnement, est autorisé, une
seule à la fois
étant admise sur la table ou le poste de travail, et aucun n 'échànge n 'est
autorisé entre les candidats.
IMAGERIE RADAR PAR SATELLITE
On se propose d'étudier deux méthodes d'imagerie radar, l'une basée sur la
difi'usion des
ondes radar et l'autre sur la possibilité d interférences entre les ondes
radar. L'antenne qui
émet les ondes radar sert aussi de récepteur. Elle est placée soit sur un avion
soit sur un
satellite.
Le problème est donc composé de quatre parties indépendantes :
-- partie I : Etude de la trajectoire d'un satellite terrestre,
-- partie Il : Etude de la diflusion des ondes radars,
- partie Il] : L'imagerie radar : résolution spatiale et distorsion,
- partie I V : L 'interférométrie radar.
Le texte comporte un certain nombre de questions qualitatives auxquelles on s
'ejÏorcera de
répondre avec concision : quelques lignes voire quelques mots suffisent
en'général.
Partie I : ETUDE DE LA TRAJECTOIRE D'UN SATELLITE TERRESTRE
Effectuer plusieurs images d'une même zone à des instants différents nécessite
une bonne
maîtrise des trajectoires des satellites. On se propose d'étudier certains
aspects du mouvement d'un
satellite (S) de masse m par rapport au référentiel géocentrique (Ro) considéré
comme galiléen. O
désigne le centre dela Terre et Oxoyozo est un trièdre lié au référentiel
géocentrique, Oxoyo est le
plan de l'équateur terrestre et 020 a la direction pôle Sud --- pôle Nord (cf.
Figure 1).
Données :
-- constante de la gravitation G = 6,67.10'11 m3s'2kg'l.
- masse de la Terre : M7-- = 5,98.1024 kg.
- ,u = GMT= 3,986.1014 m3s'2.
- R = rayon terrestre = 6378 km.
- 1 jour solaire = 86400 s.
- 1 année = 365,24 jours solaires.
Relations mathématigues :
-- Soit (il,, üa,û',) le repère lié aux coordonnées sphériques :
ÊgÎEËÏ(F)=ÊEÜ, +-l--Êîüo + _1 Êf--ü,
ôr r 69 rsm9 ô(ô
- Quelques dérivées particulières :
. 2 3
. sm a . cos a
smacosada=d cos%zsmada=d --
2 3
sin3 (2 cos3 a
sin'acosada=d 3 sin'ada=d --cosa+ 3
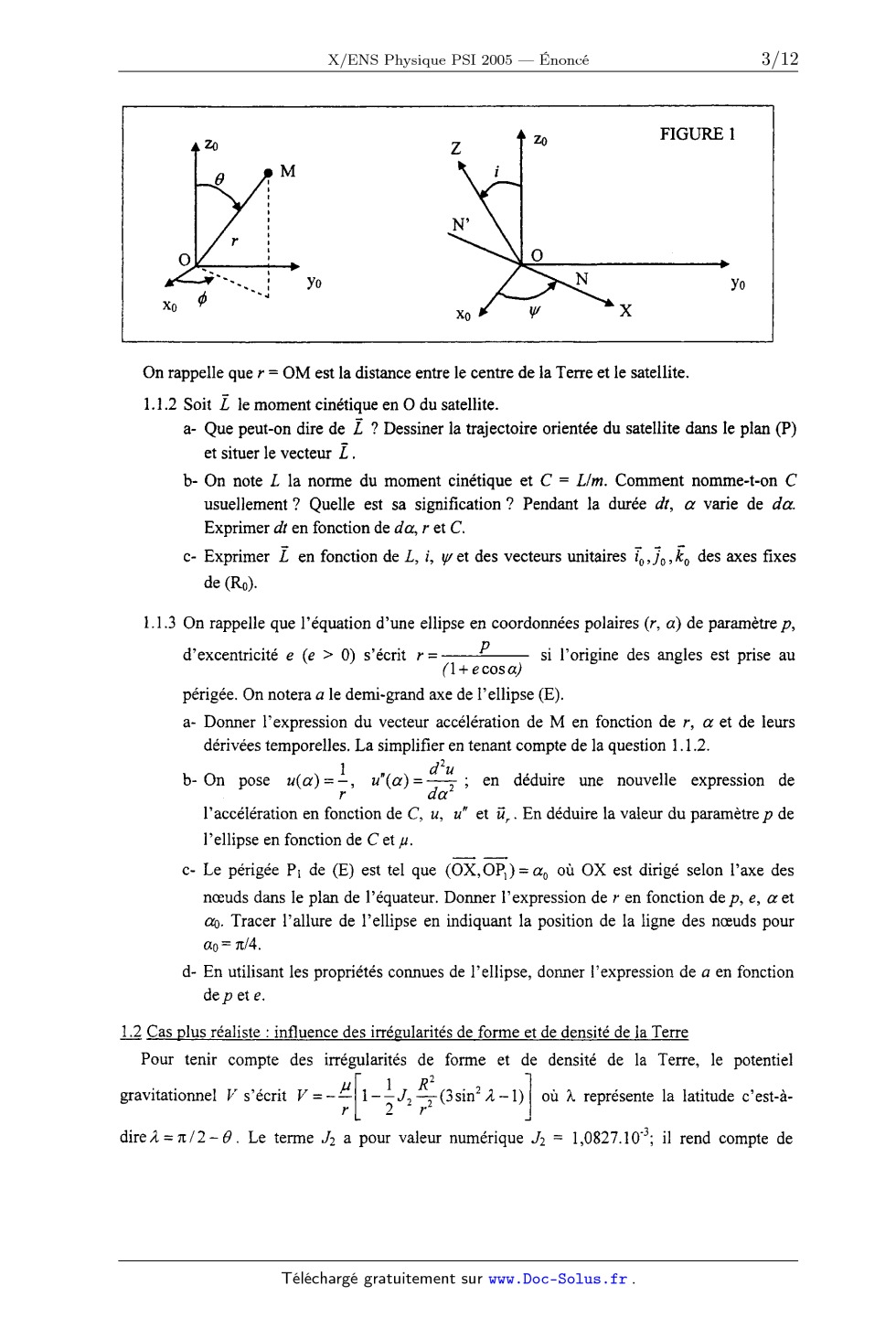
_1_,_1_ Cas élémentaire : la Terre est supposée sphérique
La position du satellite assimilé à un point M est définie par ses coordonnées
sphériques r, 9
et çôdans le repère (ü,,üg,üd) (voir Figure 1).
1.1.1 Dans le cas où la Terre est considérée comme sphérique, préciser à quelle
condition
supplémentaire on peut écrire que la force gravitationnelle qu'elle exerce se
met sous la
forme :
-- m
"?
f=--#
r
u,.
Les conditions initiales étant convenablement choisies, la trajectoire du
satellite par rapport à
(Ro) est une ellipse (E) située dans le plan (P) faisant un angle i non nul
avec le plan de
l'équateur et le coupant suivant la droite NN' appelée ligne des noeuds. La
normale au plan (P)
est OZ. Les noeuds N et N' sont les intersections de (E) avec le plan de
l'équateur; au noeud
ascendant N, le satellite passe du Sud au Nord ; au noeud descendant N', il
passe du Nord au Sud.
La ligne des noeuds N'N a la direction de OX et fait un angle w avec la
direction Oxo. Dans le
plan (P), M est repéré par les coordonnées polaires r et a dans le repère (ii,,
üa ).
FIGURE 1
|
|
|
|
l
|
l
l
l
l
|
\
|
|
&
On rappelle que r = OM est la distance entre le centre de la Terre et le
satellite.
1.1.2 Soit L le moment cinétique en O du satellite.
a- Que peut-on dire de L ? Dessiner la trajectoire orientée du satellite dans
le plan (P)
et situer le vecteur L .
b- On note L la norme du moment cinétique et C = L/m. Comment nomme-t-on C
usuellement ? Quelle est sa signification ? Pendant la durée dt, a varie de da.
Exprimer dt en fonction de da, r et C.
--. --.
c- Exprimer L en fonction de L, i, w et des vecteurs unitaires Îè,jo ,k0 des
axes fixes
de (R0).
1.1.3 On rappelle que l'équation d'une ellipse en coordonnées polaires (r, a)
de paramètre p,
d'excentricité e (EUR > O) s'écrit r= p si l'origine des angles est prise au
( 1 + e cos a)
périgée. On notera a le demi-grand axe de l'ellipse (E).
a- Donner l'expression du vecteur accélération de M en fonction de r, a et de
leurs
dérivées temporelles. La simplifier en tenant compte de la question 1.1.2.
2
b- On pose u(a)=--l-, u"(a)=îî ; en déduire une nouvelle expression de
r a
l'accélération en fonction de C, u, u" et il, . En déduire la valeur du
paramètre p de
l'ellipse en fonction de C et ,u.
c-- Le périgée P1 de (E) est tel que (OÎ,OË) : ao où OX est dirigé selon l'axe
des
noeuds dans le plan de l'équateur. Donner l'expression de r en fonction de p,
e, a et
ao. Tracer l'allure de l'ellipse en indiquant la position de la ligne des
noeuds pour
ao = n/4.
d- En utilisant les propriétés connues de l'ellipse, donner l'expression de a
en fonction
de p et e.
_1_._2_ Cas plus réaliste : influence des irrégularités de forme et de densité
de la Terre
Pour tenir compte des irrégularités de forme et de densité de la Terre, le
potentiel
. . . 1 R2 . .
gravüatmnnel V s'écr1t V : --Lu--[l -- -2-J2 ---5--(3 sm2 À -- l)] où l
représente la lat1tude c'est-à-
r r
dire/l =7t/2--6. Le terme J2 a pour valeur numérique .]2 = 1,0827.10'3 ; il
rend compte de
l'aplatissement de la Terre aux pôles (ou du bourrelet équatorial). On admettra
que le terme
correctif a un effet quasi nul pendant une durée égale à la période T du
mouvement étudié en 1.1.
Pendant cette durée, l'orbite du satellite reste donc plane et elliptique avec
les propriétés établies
en 1.1. L'effet du terme correctif se traduit alors par un lent mouvement du
plan de l'orbite.
On posera pour alléger les calculs B = 3m,uJ2R2 et on admettra la relation
vectorielle :
. .. . . . . . . . . 2 ?
cosB sm6 u ,, = -(sm15mw sma cosa + sm1 c051 cos w sm a ) 10
+ (sini cos 1// sina cosa - sini cosi sim/f sin2a ) lo
1.2.1 Soit f la nouvelle force gravitationnelle subie par le satellite. On pose
-
f : frür +f9û9 +f,ü, . Exprimer fe et f,, en fonction de B, r et 9.
1.2.2 a- Soit Ü? le moment en O de la force gravitationnelle Î . A l'aide du
schéma de la
Figure 2, montrer que les contributions au moment global M 0 des forces subies
par
le satellite sont de même sens lorsque celui--ci se situe soit en A soit en B.
Pôle Nord
7
FIGURE 2
b- Exprimer XJ: en fonction de B, r, 9 et en utilisant la base des coordonnées
sphériques (ii,, {ie, ii,, ).
_
c-- Ecrire Mo sous la forme Mxio + M }, j0 +Mzk0 , les coordonnées Mx, My, Mz
étant
exprimées en fonction de B, r, i, guet a.
1.2.3 a- Soit (M,) -- 1 J;M,(oe(1))dr la valeur moyenne de M,, pendant la durée
T. Montrer
"ï
1 27r
: E? 0
b- Calculer (M,); montrer que sont indépendants de ao. En déduire
que l'on a : (M,) r'M,(a)da
que --ËÇ£-sinicosisinw.
17 P
Ba)
c-- Exprimer ---- en fonction de L, J2, R, a), a et e.
2Cp
1.2.4 a- En utilisant l'expression vectorielle de [: obtenue au 1.1.2.c,
calculer (%) puis
(Ro)
--
écrire, en posant <Î/ÏÇ> : (M, >Â, + ÎO + (Mz>k0 , la relation
vectorielle £l_L_ =.
'" (R.)
b- Montrer que i est constant.
c- Calculer d ({{/dt en fonction de a), R, a, J2, i et e.
d 3 R 2
d- Quand l'orbite est circulaire, on trouve: ---'£I- : ----w(--;) J'2 cosi.
Retrouver
rapidement l'équivalent de la troisième loi de Kepler dans le cas du mouvement
circulaire uniforme.
La vitesse angulaire étant exprimée en degrés par jour on a donc:
7
% : ----k(--IË-)2 cosi . Exprimer k en fonction de R, J2 et ,u puis calculer sa
valeur
a
numérique, le résultat devant être donné en degrés par jour.
e- A l'aide du schéma de la Figure 2 et de la relation vectorielle (%] : <ÜÇ>,
(&)
pouvait-on prévoir les résultats obtenus aux questions l.2.4.a et 1.2.4.b,
notamment
le sens du mouvement de précession de la ligne des noeuds ?
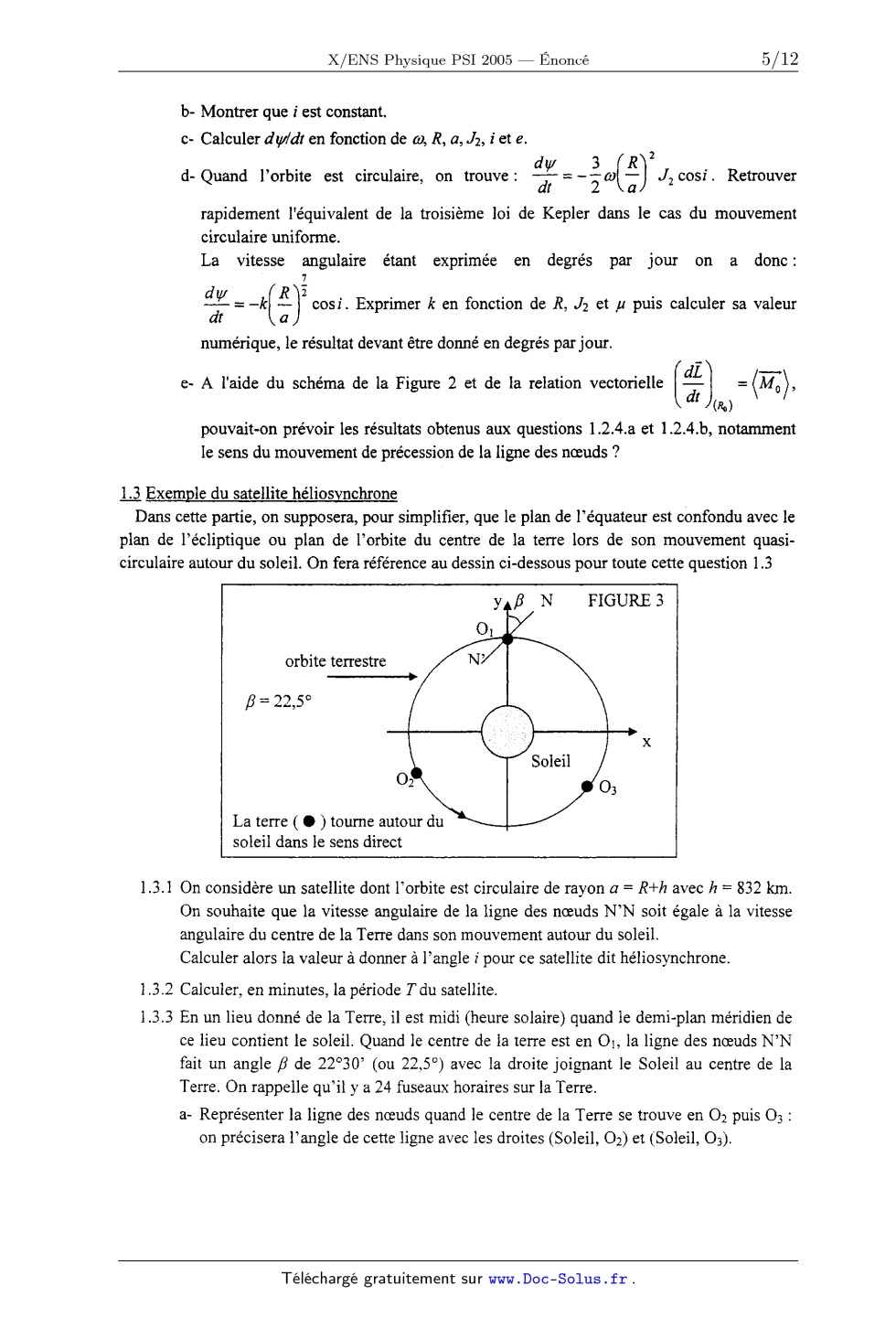
là Exemple du satellite héliosvnchrone
Dans cette partie, on supposera, pour simplifier, que le plan de l'équateur est
confondu avec le
plan de l'écliptique ou plan de l'orbite du centre de la terre lors de son
mouvement quasi--
circulaire autour du soleil. On fera référence au dessin ci-dessous pour toute
cette question 1.3
y ,8 N FIGURE3
orbite terrestre
-------->
5 = 22,5°
02
La terre ( . ) tourne autour du
soleil dans le sens direct
1.3.1 On considère un satellite dont l'orbite est circulaire de rayon a = R+h
avec h = 832 km.
On souhaite que la vitesse angulaire de la ligne des noeuds N'N soit égale à la
vitesse
angulaire du centre de la Terre dans son mouvement autour du soleil.
Calculer alors la valeur à donner à l'angle i pour ce satellite dit
héliosynchrone.
1.3.2 Calculer, en minutes, la période T du satellite.
1.3.3 En un lieu donné de la Terre, il est midi (heure solaire) quand le
demi-plan méridien de
ce lieu contient le soleil. Quand le centre de la terre est en 01, la ligne des
noeuds N'N
fait un angle fi de 22°30' (ou 22,5°) avec la droite joignant le Soleil au
centre de la
Terre. On rappelle qu'il y a 24 fuseaux horaires sur la Terre.
a- Représenter la ligne des noeuds quand le centre de la Terre se trouve en 02
puis 03 :
on précisera l'angle de cette ligne avec les droites (Soleil, 02) et (Soleil,
O3).
b-- Soit N'; le point lié à la Terre survolé par le satellite lors de son
passage en N' quand
0 est en 01. Quelle heure (solaire) est-il en N'1 lors du survol de ce point
par le
satellite '? Répondre aux mêmes questions quand la Terre est en 02 et en 03.
c- Le satellite étant destiné à photographier la surface de la Terre, quel est
l'intérêt de
disposer d'un satellite héliosynchrone ?
d- Quelle devrait être la période T' du satellite pour que le survol d'un lieu
donné de
l'équateur se produise tous les 11 jours '? On choisira pour T' la valeur la
plus proche
possible de T et légèrement inférieure. Donner les variations d'altitude et
d'angle 1"
correspondant à cette nouvelle valeur de la période. Commenter.
Dans toute la suite du problème, on s'intéresse plutôt à des procédés
d'imagerie radar reposant
sur le principe suivant: une antenne émet des ondes électromagnétiques de
fréquence f et de
longueur d'onde /l de l'ordre de quelques centimètres, en direction de la
surface de la Terre, qui
absorbe l'onde et la réémet dans toutes les directions : on dit qu'il y a
diffusion. L'onde diffusée,
aussi appelée écho, est ensuite captée par l'antenne émettrice, jouant le rôle
de récepteur. L'antenne
est embarquée à bord d'un avion ou d'un satellite, ce qui permet de balayer la
surface de la Terre.
On admettra que les ondes électromagnétiques ont le même comportement que les
ondes
lumineuses mais, l'atmosphère et les nuages perturbant très peu les ondes
radar, on prendra un
indice n = 1.
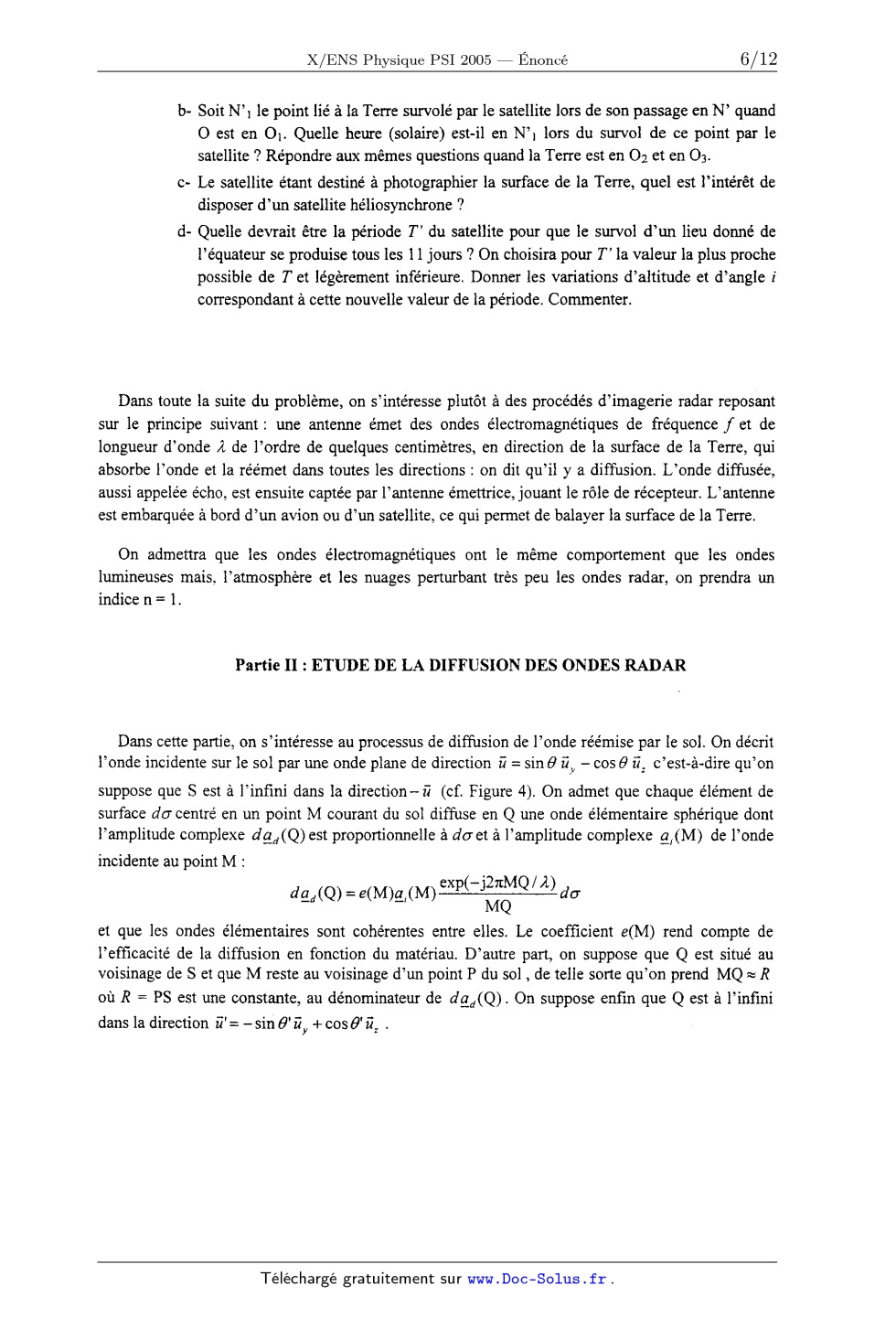
Partie II : ETUDE DE LA DIFFUSION DES ONDES RADAR
Dans cette partie, on s'intéresse au processus de diffusion de l'onde réémise
par le sol. On décrit
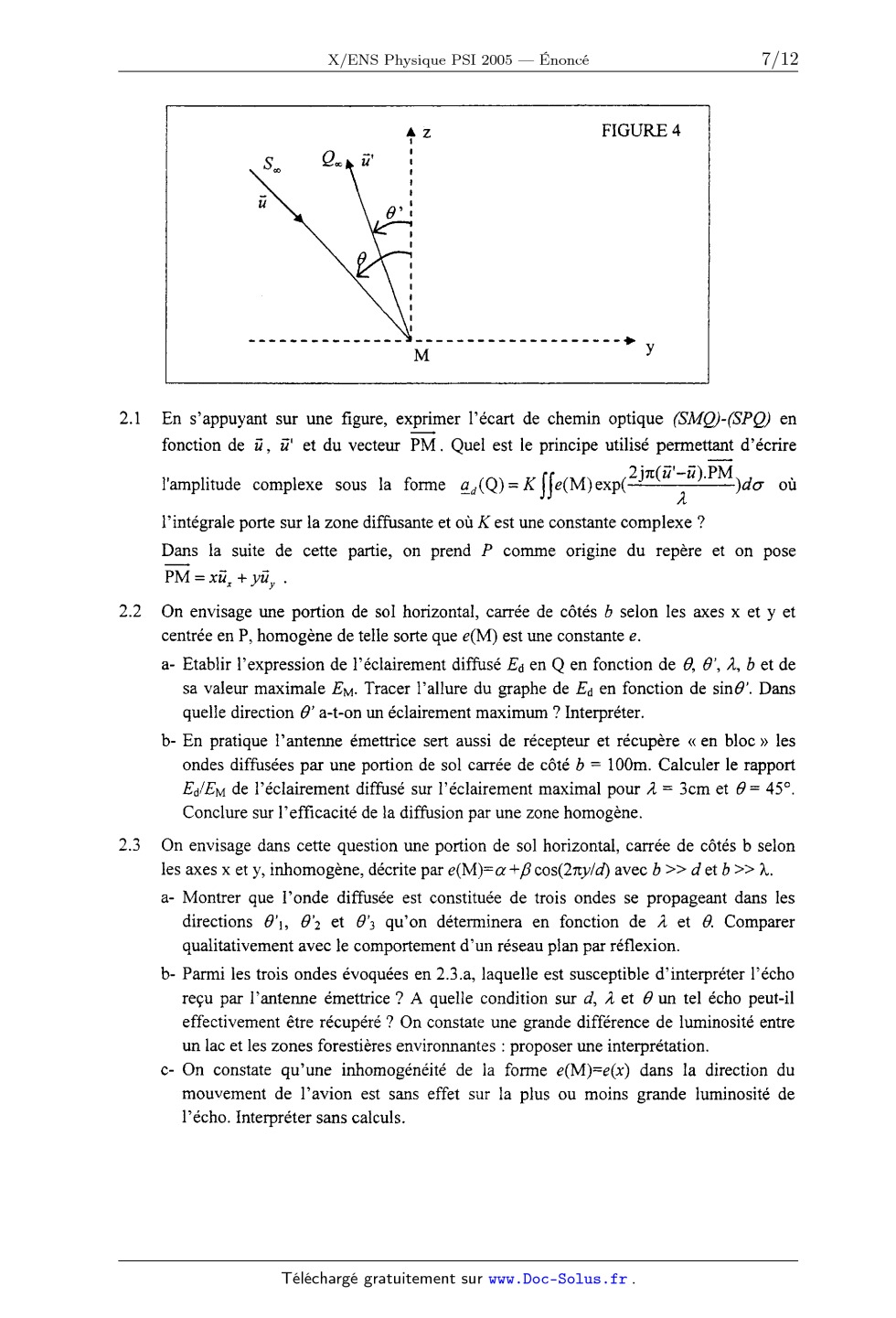
l'onde incidente sur le sol par une onde plane de direction 17 : sin 9 üy --
cos 9 il, c'est-à-dire qu'on
suppose que S est à l'infini dans la direction-- 13? (cf. Figure 4). On admet
que chaque élément de
surface da centré en un point M courant du sol diffuse en O une onde
élémentaire sphérique dont
l'amplitude complexe dgd(Q) est proportionnelle à do et à l'amplitude complexe
_q,(M) de l'onde
incidente au point M :
exp(--flnMQ/À) da
MQ
et que les ondes élémentaires sont cohérentes entre elles. Le coefficient e(M)
rend compte de
l'efficacité de la diffusion en fonction du matériau. D'autre part, on suppose
que Q est situé au
voisinage de S et que M reste au voisinage d'un point P du sol , de telle sorte
qu'on prend MQ % R
% (Q) = e(M)g_.(M)
où R = PS est une constante, au dénominateur de dgd(Q) . On suppose enfin que Q
est à l'infini
dans la direction ü' : ---siri t9' üy + cos 6" ii, .
2.1
2.2
2.3
FIGURE 4
N .
A
|
|
i
|
|
:
|
|
En s'appuyant sur une figure, exprimer l'écart de chemin optique (SMQ)-(SPQ) en
fonction de 27 , û' et du vecteur Pî\?Ï. Quel est le principe utilisé
permettant d'écrire
2 jn(ü'--ü).ëîxi
/l
l'intégrale porte sur la zone diffusante et où K est une constante complexe ?
l'amplitude complexe sous la forme g_d(Q)=Kfle(M)exp( )d0' où
Dans la suite de cette partie, on prend P comme origine du repère et on pose
PM : xux + yuy .
On envisage une portion de sol horizontal, carrée de côtés 17 selon les axes x
et y et
centrée en P, homogène de telle sorte que e(M) est une constante e.
a- Etablir l'expression de l'éclairement diffusé Ed en Q en fonction de EUR,
9', À, b et de
sa valeur maximale EM. Tracer l'allure du graphe de Ed en fonction de sin9'.
Dans
quelle direction 6 ' a-t-on un éclairement maximum '? Interpréter.
b- En pratique l'antenne émettrice sert aussi de récepteur et récupère << en bloc» les ondes diffusées par une portion de sol carrée de côté 2) = 100m. Calculer le rapport EC,/EM de l'éclairement diffusé sur l'éclairement maximal pour fl = 3cm et 9 = 45°. Conclure sur l'efficacité de la diffusion par une zone homogène. On envisage dans cette question une portion de sol horizontal, carrée de côtés b selon les axes x et y, inhomogène, décrite par e(M)=a +fl cos(2ny/d) avec !) >> d et
b >> X.
a-- Montrer que l'onde diffusée est constituée de trois ondes se pr0pageant
dans les
directions 6'1, 6'2 et 9'g qu'on déterminera en fonction de À et 9. Comparer
qualitativement avec le comportement d'un réseau plan par réflexion.
b- Parmi les trois ondes évoquées en 2.3.a, laquelle est susceptible
d'interpréter l'écho
reçu par l'antenne émettrice ? A quelle condition sur d, À et 9 un tel écho
peut--il
effectivement être récupéré ? On constate une grande différence de luminosité
entre
un lac et les zones forestières environnantes : proposer une interprétation.
c-- On constate qu'une inhomogénéité de la forme e(M)=e(x) dans la direction du
mouvement de l'avion est sans effet sur la plus ou moins grande luminosité de
l'écho. Interpréter sans calculs.
Partie III : IMAGERIE RADAR : RESOLUTION SPATIALE ET DISTORSION
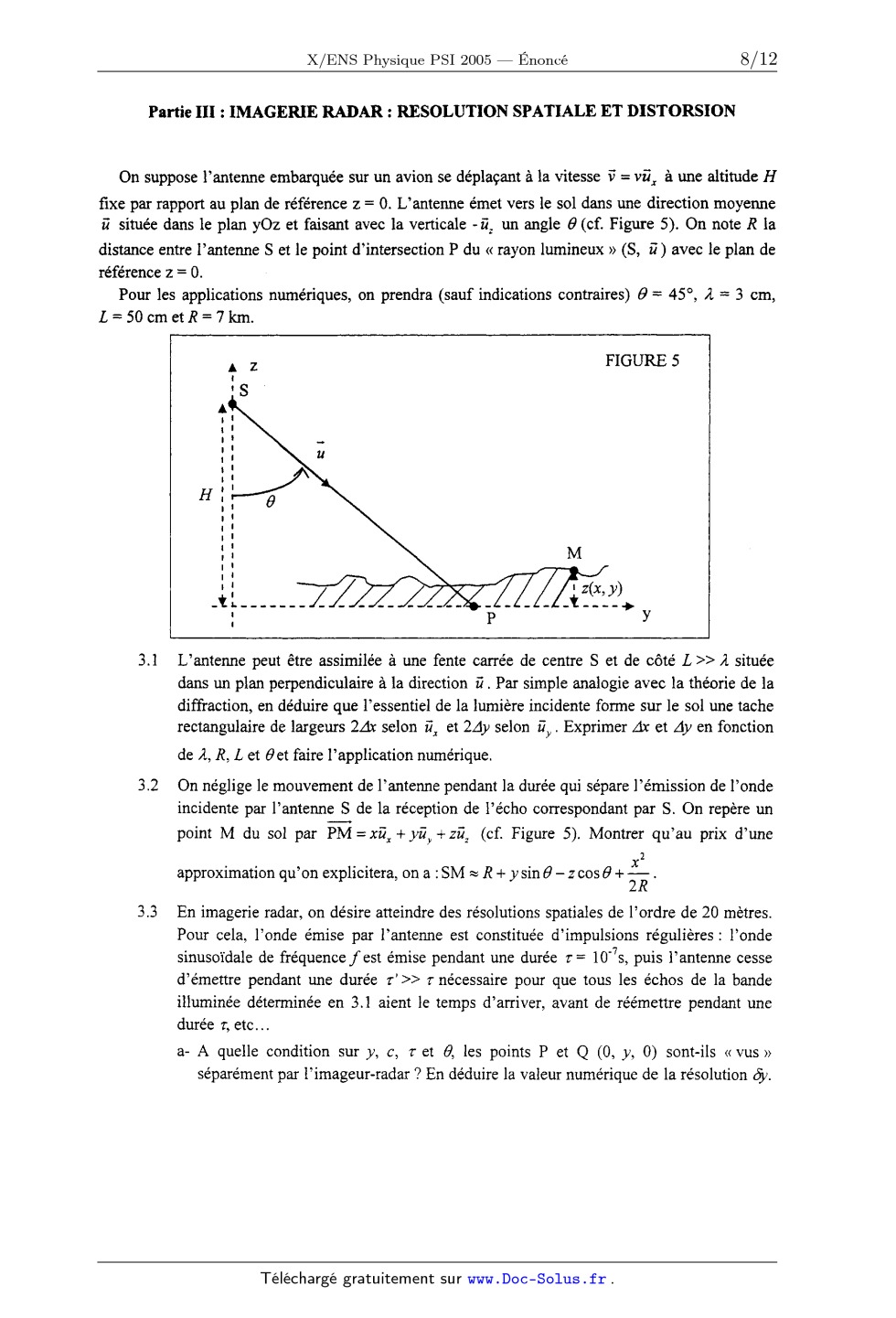
On suppose l'antenne embarquée sur un avion se déplaçant à la vitesse i3 = vii,
à une altitude H
fixe par rapport au plan de référence 2 = O. L'antenne émet vers le sol dans
une direction moyenne
--
u située dans le plan yOz et faisant avec la verticale --üz un angle 9 (cf.
Figure 5). On note R la
distance entre l'antenne S et le point d'intersection P du « rayon lumineux »
(S, 17) avec le plan de
référence 2 = 0.
Pour les applications numériques, on prendra (sauf indications contraires) 9 =
45°, Â = 3 cm,
L=50cmetR=7km.
3.1
3.2
3.3
::
A
t
L
:\
\
--r---------------
L'antenne peut être assimilée à une fente carrée de centre S et de côté L >> xl
située
dans un plan perpendiculaire à la direction 17. Par simple analogie avec la
théorie de la
diffraction, en déduire que l'essentiel de la lumière incidente forme sur le
sol une tache
rectangulaire de largeurs 2Ax selon 52, et 2Ay selon üy. Exprimer Ax et Ay en
fonction
de À, R, L et Het faire l'application numérique.
On néglige le mouvement de l'antenne pendant la durée qui sépare l'émission de
l'onde
incidente par l'antenne S de la réception de l'écho correspondant par 8. On
repère un
point M du sol par PM =xüx + yüy +züz (of. Figure 5). Montrer qu'au prix d'une
2
X
approximation qu'on explicitera, on a : SM % R + y sin 9 ---- z cos 9 + îR .
En imagerie radar, on désire atteindre des résolutions spatiales de l'ordre de
20 mètres.
Pour cela, l'onde émise par l'antenne est constituée d'impulsions régulières:
l'onde
sinusoïdale de fréquence f est émise pendant une durée r = 1075, puis l'antenne
cesse
d'émettre pendant une durée r'>> r nécessaire pour que tous les échos de la
bande
illuminée déterminée en 3.1 aient le temps d'arriver, avant de réémettre
pendant une
durée 1, etc. ..
a-- A quelle condition sur y, c, ? et 9, les points P et Q (0, y, 0) sont--ils
«vus >>
séparément par l'imageur-radar '? En déduire la valeur numérique de la
résolution ôy.
Comment faudrait-il choisir 7 pour réduire davantage 5y ? Quelle serait
l'influence
de ce choix sur l'énergie récupérée par le détecteur ?
b-- Evaluer numériquement le décalage temporel entre les échos diffusés par le
point
Q (Ax, O, 0) situé au bord de la tache illuminée par l'onde incidente (cf.
question 3.1)
et par le point P. Comparer ce décalage à r et en déduire sans nouveau calcul la
valeur littérale et numérique de la résolution 5x dans la direction du
mouvement de
l'avion.
c-- Quelle devrait être la longueur L' de l'antenne pour qu'on ait la même
résolution
spatiale selon ûx et üy ? Conclure sachant que l'antenne est embarquée sur un
avion.
d-- Montrer que pour une altitude H donnée, le choix de 9 est imposé par un
compromis
entre les résolutions cîx et ôy.
En pratique, le procédé de synthèse d'ouverture, qui ne sera pas étudié dans ce
problème, permet
d'atteindre des résolutions âc = ô_'y = 20m en utilisant des signaux modulés en
fréquence, même
avec des radars embarqués sur satellite (R = 832 km par exemple). Dans la suite
de cette partie, on
supposera la résolution parfaite âx = @» = 0.
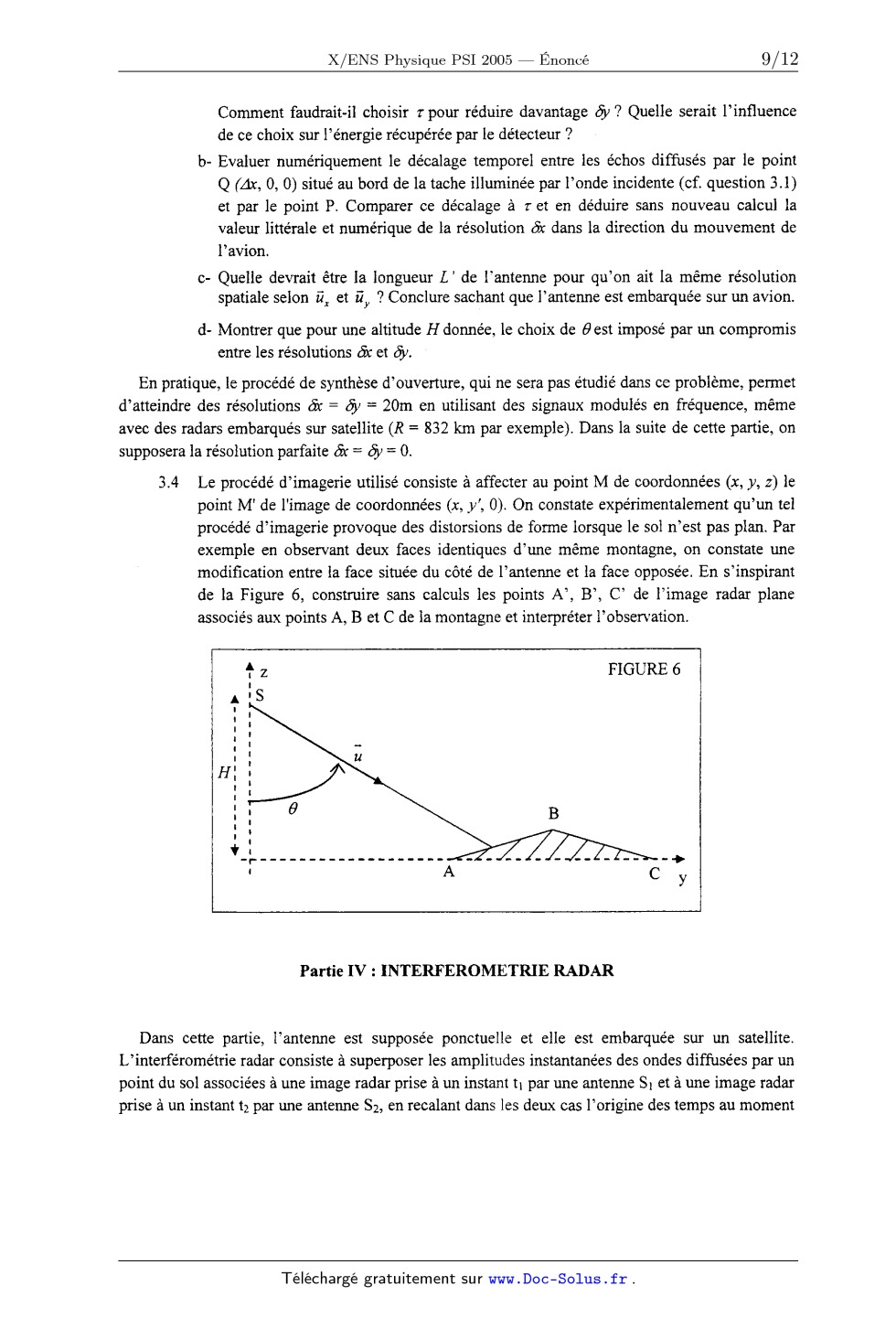
3.4 Le procédé d'imagerie utilisé consiste à affecter au point M de coordonnées
(x, y, z) le
point M' de l'image de coordonnées (x, y', 0). On constate expérimentalement
qu'un tel
procédé d'imagerie provoque des distorsions de forme lorsque le sol n'est pas
plan. Par
exemple en observant deux faces identiques d'une même montagne, on constate une
modification entre la face située du côté de l'antenne et la face opposée. En
s'inspirant
de la Figure 6, construire sans calculs les points A', B', C' de l'image radar
plane
associés aux points A, B et C de la montagne et interpréter l'observation.
FIGURE 6
Partie IV : INTERFEROMETRIE RADAR
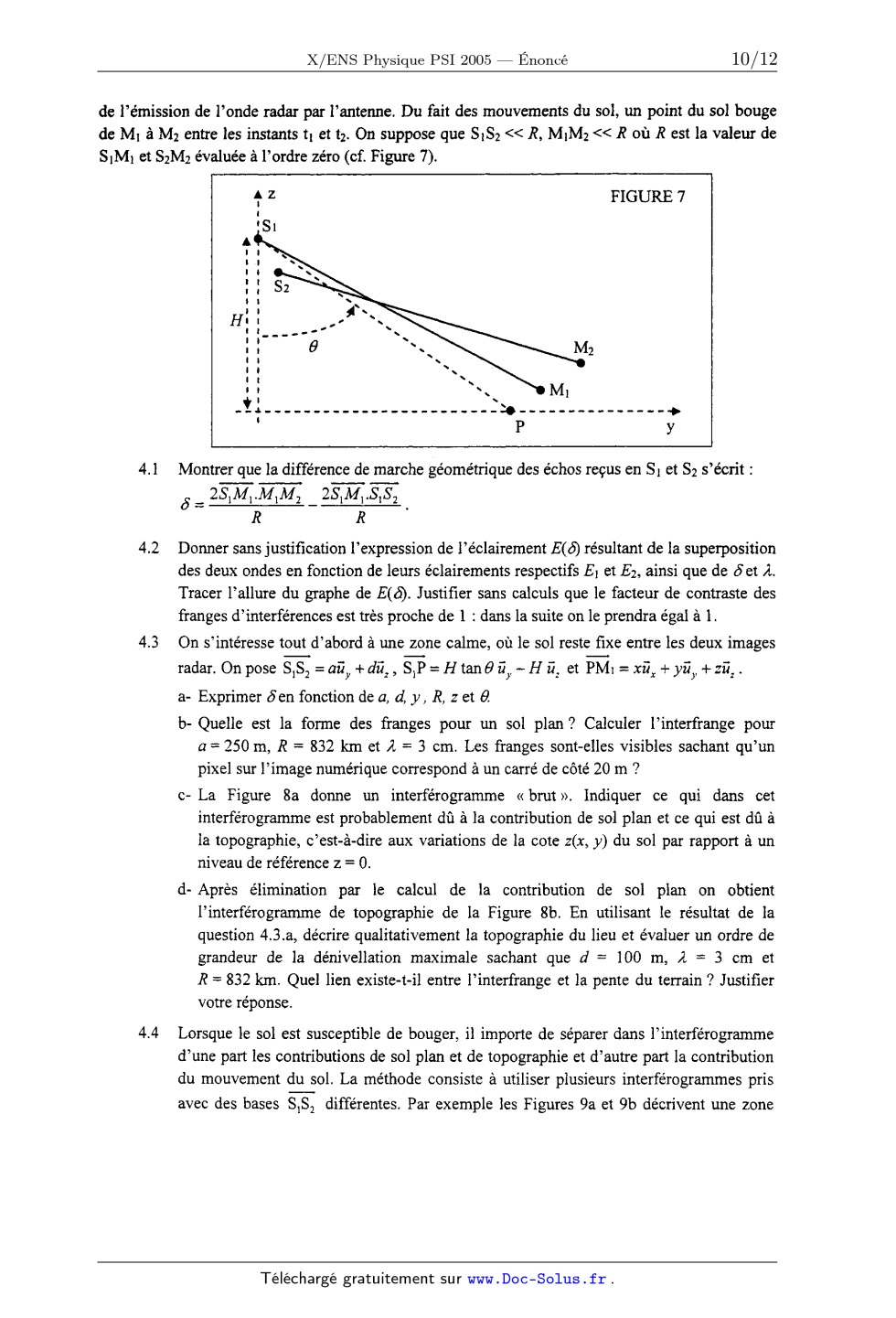
Dans cette partie, l'antenne est supposée ponctuelle et elle est embarquée sur
un satellite.
L'interférométrie radar consiste à superposer les amplitudes instantanées des
ondes diffusées par un
point du sol associées à une image radar prise à un instant tl par une antenne
81 et à une image radar
prise à un instant tz par une antenne 82, en recalant dans les deux cas
l'origine des temps au moment
de l'émission de l'onde radar par l'antenne. Du fait des mouvements du sol, un
point du sol bouge
de M; à M2 entre les instants tl et tz. On suppose que 8182 << R, M 1M2 << R où R est la valeur de SIM] et 82M2 évaluée à l'ordre zéro (cf. Figure 7). + z FIGURE 7 >
::
'f°"""
+!
+
..Ü
\< 4.1 Montrer que la différence de marche géométrique des échos reçus en S; et 82 s'écrit : 5 : 281M1.M1M2 __ 25.M1.SÎÊÇ _ R R 4.2 Donner sans justification l'expression de l'éclairement E(ô) résultant de la superposition des deux ondes en fonction de leurs éclairements respectifs E 1 et E2, ainsi que de 5 et À. Tracer l'allure du graphe de E(â). Justifier sans calculs que le facteur de contraste des franges d'interférences est très proche de 1 : dans la suite on le prendra égal à 1. 4.3 On s'intéresse tout d'abord à une zone calme, où le sol reste fixe entre les deux images radar. On pose 8,82 : aüy + düz , S,P : H tan9 ü}, --- H 172 et PM1 = xüx + yüy + züz . a-- Exprimer ôen fonction de a, d, y, R, 2 et 9. b-- Quelle est la forme des franges pour un sol plan '? Calculer l'interfrange pour a = 250 m, R = 832 km et 2. = 3 cm. Les franges sont-elles visibles sachant qu'un pixel sur l'image numérique correspond à un carré de côté 20 m ? c-- La Figure 8a donne un interférogramme << brut >>. Indiquer ce qui dans cet
interférogramme est probablement dû à la contribution de sol plan et ce qui est
dû à
la topographie, c'est--à--dire aux variations de la cote z(x, y) du sol par
rapport à un
niveau de référence 2 = 0.
d- Après élimination par le calcul de la contribution de sol plan on obtient
l'interférogramme de topographie de la Figure 8b. En utilisant le résultat de la
question 4.3.a, décrire qualitativement la topographie du lieu et évaluer un
ordre de
grandeur de la dénivellation maximale sachant que d = 100 m, Â = 3 cm et
R = 832 km. Quel lien existe-t--il entre l'interfrange et la pente du terrain ?
Justifier
votre réponse.
4.4 Lorsque le sol est susceptible de bouger, il importe de séparer dans
l'interférogramme
d'une part les contributions de sol plan et de topographie et d'autre part la
contribution
du mouvement du sol. La méthode consiste à utiliser plusieurs interférogrammes
pris
___
avec des bases S.S2 différentes. Par exemple les Figures % et % décrivent une
zone
donnée avec d = 223 m et d = 130 m ; les Figures lOa et 10b décrivent une autre
zone
avec d= 54 m et d= 133m.
a- On remarque que sur les Figures 9 le nombre de franges n'évolue pas
lorsqu'on fait
varier d, alors que sur les Figures 10 ce nombre évolue. Dans lequel des deux
cas
peut--on conclure que les franges sont dues à un mouvement du sol ?
b- Après élimination par le calcul de la contribution de sol plan et de la
contribution de
topographie, l'interférogramme de la Figure 11a & été obtenu lors de l'étude
d'un
tremblement de terre. Montrer que seuls les déplacements le long de la ligne de
visée
sont perçus. Evaluer l'ordre de grandeur de l'écart maximum entre les
glissements de
terrain des différents points de la figure. En quoi l'interférogramme obtenu
après
traitement se rattache--t--il aux franges d'égale épaisseur ? A titre
indicatif, on donne
sur la Figure llb l'interférogramme obtenu par le calcul après modélisation du
tremblement de terre ; la parfaite coïncidence des Figures lla et 1 lb prouve à
la fois
l'efficacité de la détection interférométrique du séisme et de sa simulation.
FIGURES 83 à 11h
a: wm:©OE
m: mOEDOEOE
noe OEOEDOEOE
noe MOEDOEOE
.Çé;.....: $$$--... ...x;&....5 ...? ...:...3ZÏZ....Ï
.MËÜ4YJ.
"
. w
&
...,vv.uw
oe...æ ...
W
. < a... 4. mm MOEDOE moe MOEDOOE 7Ï: ." _ /. «..--... :. "; .....îï... ...:. .....-- .:.;-- ... .:.æ ,...