
e3a Physique et Chimie PSI 2016
| Thème de l'épreuve | Étude des caractéristiques d'un robot autonome |
| Principaux outils utilisés | ondes sonores, électricité, conversion d'énergie, programmation |
| Mots clefs | ultrasons, propagation, réflexion, transmission, vecteur de Poynting acoustique, effet Doppler, équation de d'Alembert, détection hétérodyne, filtres, robot, moteur à courant continu, écart-type, incertitude-type, régression linéaire |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)


Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
117
Tournez la page S.V.P.
2
« Un robot est une machine équipée de capacités de perception, de décision et
daction qui lui permettent dagir de manière autonome dans son environnement en
fonction
de la perception quil en a. » David Filliat ENSTA ParisTech
La robotique est donc un très bon exemple de domaine pluridisciplinaire qui
implique
de nombreuses thématiques. Le but de ce problème est détudier quelques
caractéristiques dun robot autonome. Il comporte deux volets : le premier
étudie les
propriétés de la télémétrie par ultrasons et le second a pour but de déterminer
les principaux
paramètres physiques du moteur qui alimente le robot.
PREMIERE PARTIE
TÉLÉMETRIE PAR ULTRASONS
A / DÉTECTEUR À ULTRASONS
La recherche du maximum dinformation sur lenvironnement est une quête
perpétuelle en
robotique.
Pour se faire, la télémétrie, qui consiste à mesurer des distances, est
extrêmement
importante. Elle permet au robot de déterminer la position des obstacles (ou
leur absence) et ainsi
de prendre la décision adéquate.
Dans un premier temps, on compare à laide du Cahier Technique suivant deux
types de
télémétrie.
Les différentes technologies de détecteurs
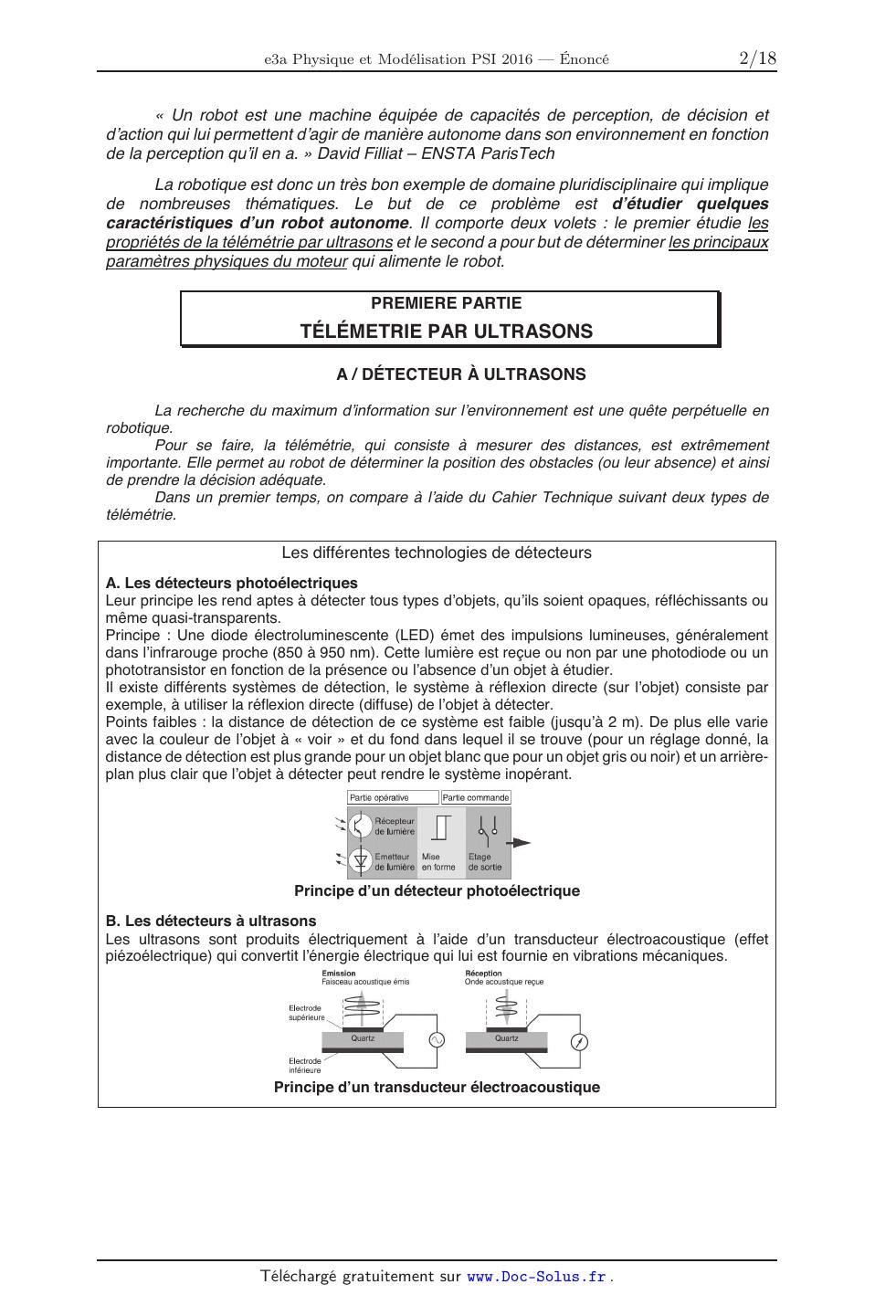
A. Les détecteurs photoélectriques
Leur principe les rend aptes à détecter tous types dobjets, quils soient
opaques, réfléchissants ou
même quasi-transparents.
Principe : Une diode électroluminescente (LED) émet des impulsions lumineuses,
généralement
dans linfrarouge proche (850 à 950 nm). Cette lumière est reçue ou non par une
photodiode ou un
phototransistor en fonction de la présence ou labsence dun objet à étudier.
Il existe différents systèmes de détection, le système à réflexion directe (sur
lobjet) consiste par
exemple, à utiliser la réflexion directe (diffuse) de lobjet à détecter.
Points faibles : la distance de détection de ce système est faible (jusquà 2
m). De plus elle varie
avec la couleur de lobjet à « voir » et du fond dans lequel il se trouve (pour
un réglage donné, la
distance de détection est plus grande pour un objet blanc que pour un objet
gris ou noir) et un arrièreplan plus clair que lobjet à détecter peut rendre le
système inopérant.
Principe dun détecteur photoélectrique
B. Les détecteurs à ultrasons
Les ultrasons sont produits électriquement à laide dun transducteur
électroacoustique (effet
piézoélectrique) qui convertit lénergie électrique qui lui est fournie en
vibrations mécaniques.
Principe dun transducteur électroacoustique
3
Le principe est de mesurer le temps de propagation entre le capteur et la
cible. Lavantage des
capteurs ultrasons est de pouvoir fonctionner à grande distance (jusquà 10 m),
mais surtout dêtre
capable de détecter tout objet réfléchissant le son indépendamment de la forme
et de la couleur.
Facteurs dinfluence : les détecteurs à ultrasons sont particulièrement adaptés
à la détection dobjet
dur et présentant une surface plane et perpendiculaire à laxe de détection.
Cependant le
fonctionnement du détecteur à ultrasons peut être perturbé par différents
facteurs :
! Les courants dair brusques et de forte intensité peuvent accélérer ou dévier
londe acoustique.
! Les gradients de température importants dans le domaine de détection : une
forte chaleur
dégagée par un objet crée des zones de température différentes qui modifient le
temps de
propagation de londe et empêchent une détection fiable.
! Les isolants phoniques : les matériaux tels le coton, les tissus, le
caoutchouc, absorbent le son.
! Langle entre la face de lobjet à détecter et laxe de référence du détecteur.
Cahier Technique Schneider Electric n°209
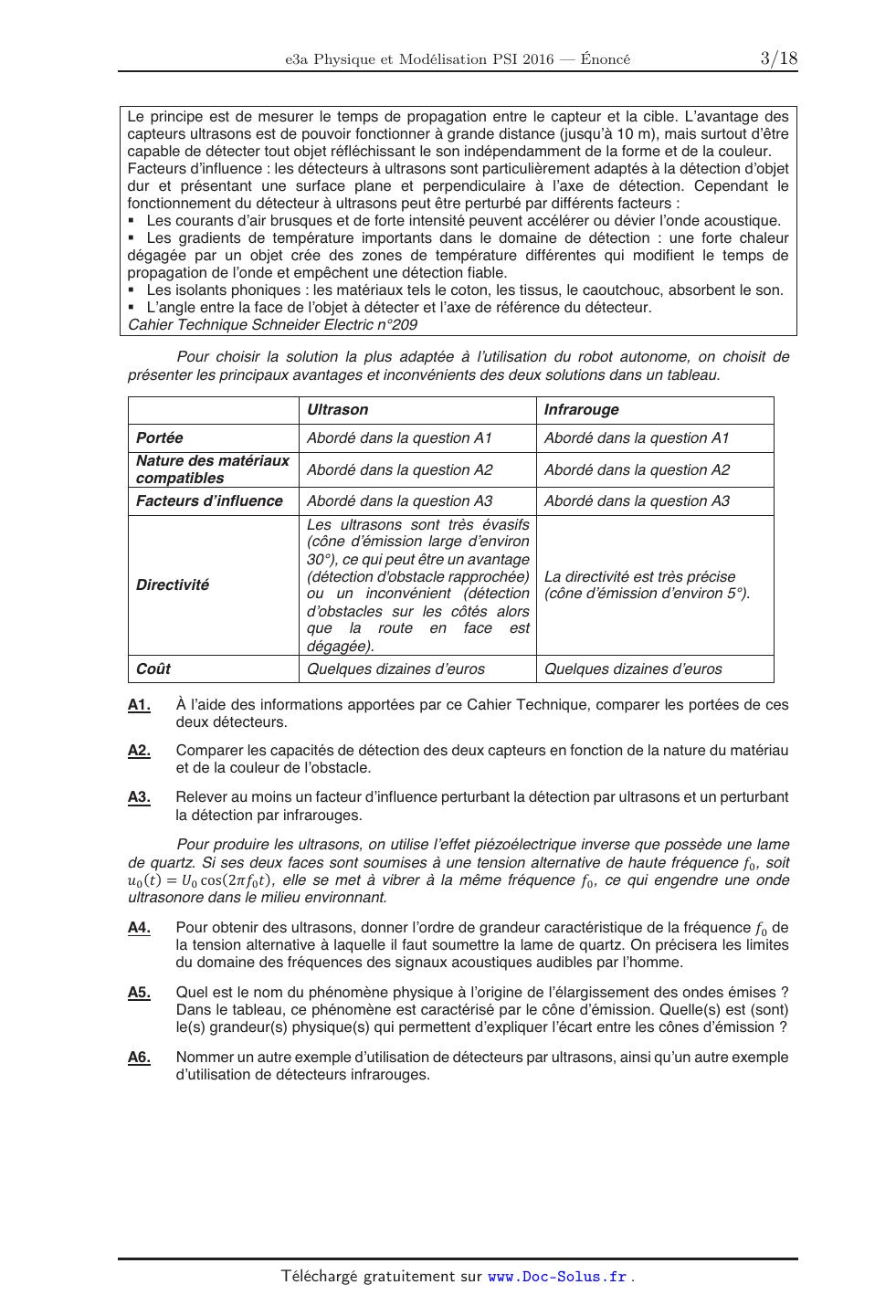
Pour choisir la solution la plus adaptée à lutilisation du robot autonome, on
choisit de
présenter les principaux avantages et inconvénients des deux solutions dans un
tableau.
Ultrason
Infrarouge
Portée
Abordé dans la question A1
Abordé dans la question A1
Nature des matériaux
compatibles
Abordé dans la question A2
Abordé dans la question A2
Facteurs dinfluence
Abordé dans la question A3
Abordé dans la question A3
Directivité
Les ultrasons sont très évasifs
(cône démission large denviron
30°), ce qui peut être un avantage
(détection d'obstacle rapprochée) La directivité est très précise
ou un inconvénient (détection (cône démission denviron 5°).
dobstacles sur les côtés alors
que la route en face est
dégagée).
Coût
Quelques dizaines deuros
Quelques dizaines deuros
A1.
À laide des informations apportées par ce Cahier Technique, comparer les
portées de ces
deux détecteurs.
A2.
Comparer les capacités de détection des deux capteurs en fonction de la nature
du matériau
et de la couleur de lobstacle.
A3.
Relever au moins un facteur dinfluence perturbant la détection par ultrasons et
un perturbant
la détection par infrarouges.
Pour produire les ultrasons, on utilise leffet piézoélectrique inverse que
possède une lame
de quartz. Si ses deux faces sont soumises à une tension alternative de haute
fréquence !", soit
#" $%& ' (" )*+$,-!" %&, elle se met à vibrer à la même fréquence !", ce qui
engendre une onde
ultrasonore dans le milieu environnant.
A4.
Pour obtenir des ultrasons, donner lordre de grandeur caractéristique de la
fréquence !" de
la tension alternative à laquelle il faut soumettre la lame de quartz. On
précisera les limites
du domaine des fréquences des signaux acoustiques audibles par lhomme.
A5.
Quel est le nom du phénomène physique à lorigine de lélargissement des ondes
émises ?
Dans le tableau, ce phénomène est caractérisé par le cône démission. Quelle(s)
est (sont)
le(s) grandeur(s) physique(s) qui permettent dexpliquer lécart entre les cônes
démission ?
A6.
Nommer un autre exemple dutilisation de détecteurs par ultrasons, ainsi quun
autre exemple
dutilisation de détecteurs infrarouges.
Tournez la page S.V.P.
4
Dans toute la suite de la première partie sur la télémétrie, on considère que
le détecteur par
ultrasons a été choisi et on cherche à comprendre les facteurs perturbant le
fonctionnement du
détecteur à ultrasons. Dans la sous-partie B, on étudie pourquoi « les forts
gradients de température
[...] empêchent une détection fiable » ; puis on sintéresse, dans la
sous-partie C, au problème « des
isolants phoniques » et pour finir, on analyse le problème de la détection
dobstacles mobiles dans
la sous-partie D.
B / CÉLÉRITÉ DE LONDE ULTRASONORE
On étudie la propagation dune onde ultrasonore produite dans lair.
Lair est assimilé à un gaz parfait, initialement au repos de vitesse
!" % #&$, et qui en labsence
de toute perturbation possède une masse volumique '" , une pression (" et à une
température )" .
On suppose que la lame de quartz, positionnée à labscisse * % &, transmet ses
vibrations
aux couches dair environnantes et crée ainsi une onde ultrasonore sinusoïdale
de fréquence +" se
propageant suivant ,-. /
0 à la célérité 3.
Le passage de londe perturbe léquilibre.
En un point 4 de lair dabscisse *, à linstant 5, on note ainsi :
· 61,*. 52 la pression avec :
61,*. 52 % (" 7 68 ,*. 52,
· '1,*. 52 la masse volumique avec :
1'1,*. 52 % '" 7 '8 ,*. 52.
· !$1,*. 52 % !1,*. 521/
où !8 ,*. 521est petit devant 3.
!$1,*. 52 % !
0
Lécoulement du fluide est considéré parfait et on néglige laction de la
pesanteur.
On donne la constante des gaz parfaits : 9 % :.;<1=> ?@A B8 > C B8 .
Dans toute la suite, on se place dans lapproximation acoustique. Cela signifie
que :
· on considère des ondes de faible amplitude, pour lesquelles la surpression 68
est très
petite par rapport à la pression (" de lair au repos : D68 D E (" ;
· on mène les calculs au premier ordre.
B1.
Lair étant assimilé à un gaz parfait de masse molaire 4F , à la température )"
supposée
(dans un premier temps) constante, retrouver lexpression de la pression 6 de
lair en fonction
de ', 4F , )" et 9. En déduire que lapproximation acoustique se traduit aussi
par la relation
'8 E '" .
Bilan de masse
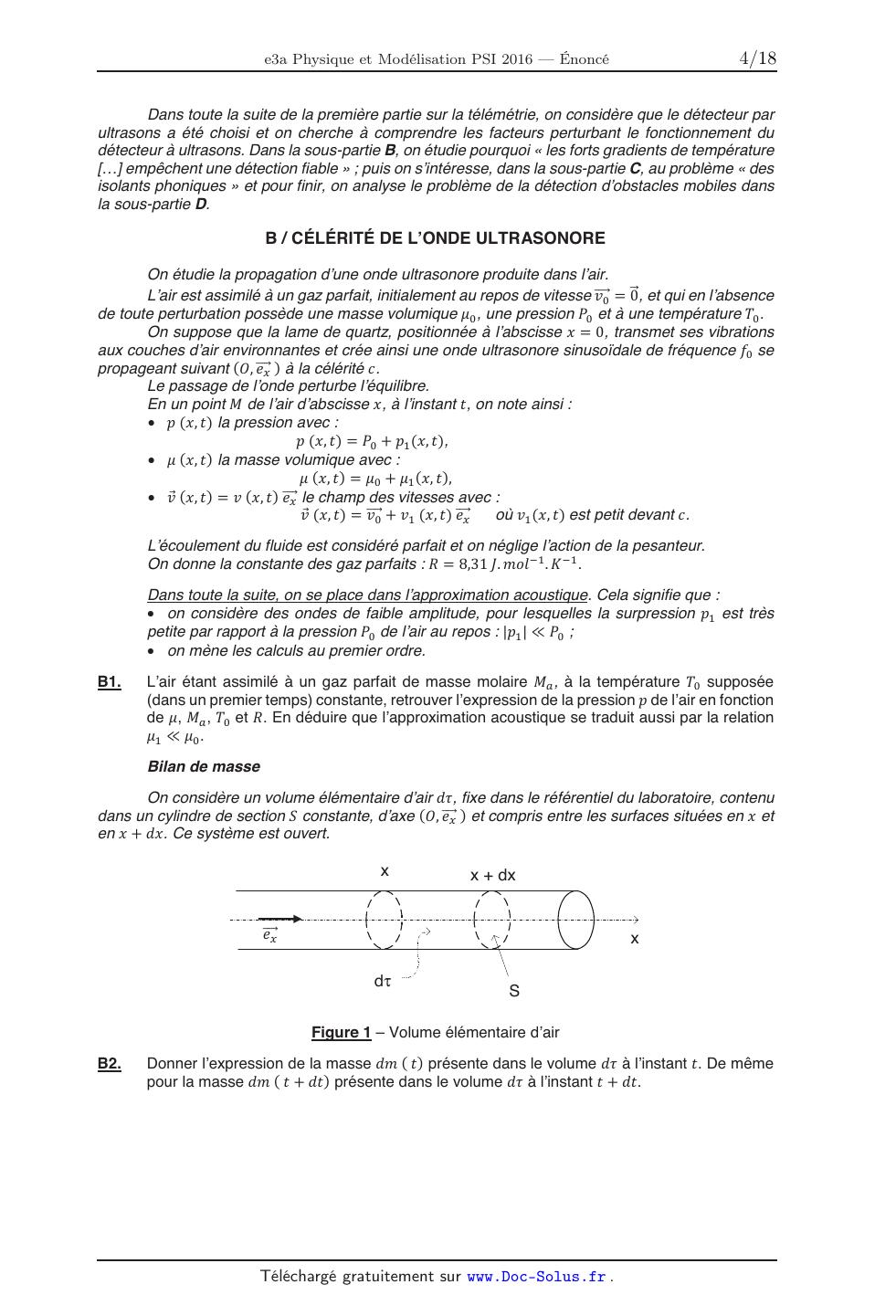
On considère un volume élémentaire dair GH, fixe dans le référentiel du
laboratoire, contenu
dans un cylindre de section I constante, daxe ,-.
/0 et compris entre les surfaces situées en * et
en * 7 G*. Ce système est ouvert.
x
x + dx
/0
x
d
S
Figure 1 Volume élémentaire dair
B2.
Donner lexpression de la masse G?1,152 présente dans le volume GH à linstant 5.
De même
pour la masse G?1,15 7 G52 présente dans le volume GH à linstant 5 7 G5.
Tournez la page S.V.P.
......
m5 :: QOÊ3mä 8%:5=m no:om3mä $ Êm3mîm bmw :Ëmoeo=oe 3% 5 omoe ......Ë: Soc....
mSo:oäoe... o: ....8=
-l> 03
U.}
.b
N
Célérité (m/s)
who
HO ....w NO N... wo
Am3--OEEÊÆ îQ
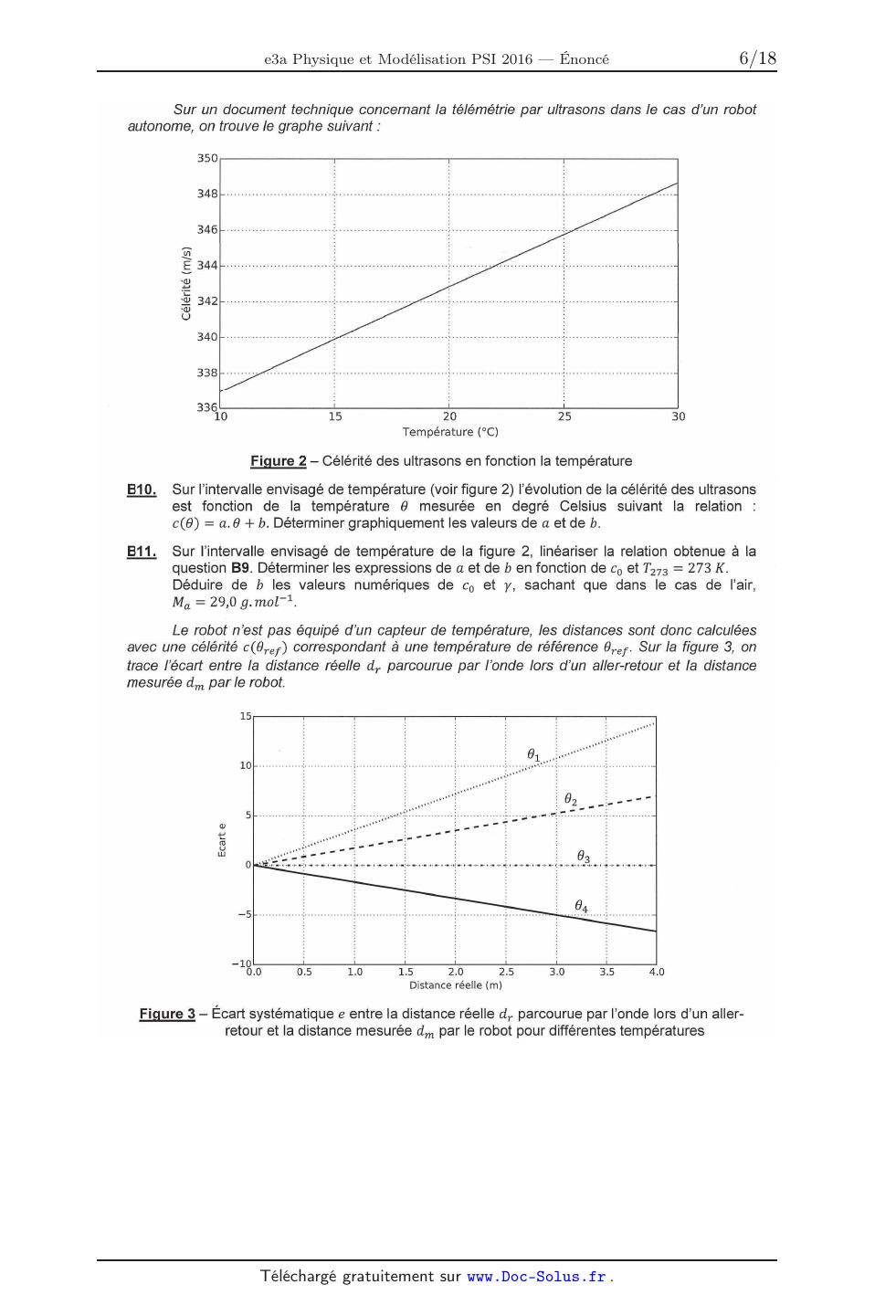
In:--m » | Om_m1ä amoe c=$m0:w @: 330203 _m 333868
3. m5 ___:OE2m__m m:<...mmom am 333888 ?o= mm:--@ B __m
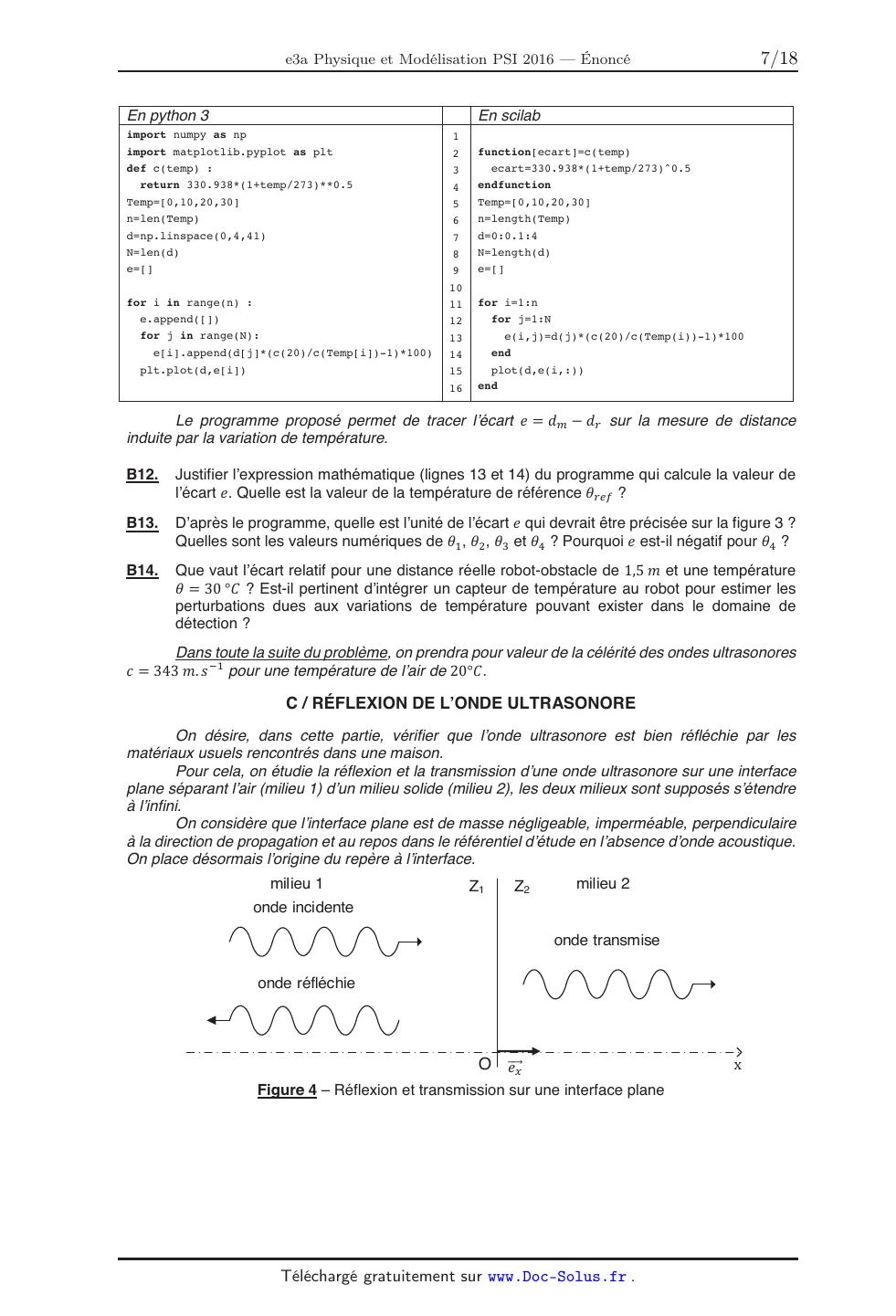
Figure 4 Réflexion et transmission sur une interface plane
Tournez la page S.V.P.
8
On considère le cas dondes planes progressives, harmoniques se propageant
suivant laxe
!"# $&&&&'()
% à la célérité *.
On adopte la notation complexe pour les surpressions instantanées et pour les
vitesses
instantanées.
De plus, on introduit limpédance acoustique +, dun milieu -, coefficient
supposé réel positif.
On a donc pour londe incidente :
· .', !/# 0) ( 1 ., !/# 0)($&&&&'% 1 .,2 34567!82 0 9 :, /);($&&&&'%
· <, !/# 0) 1 <,2 34567!82 0 9 :, /); 1 += > .,2 34567!82 0 9 :, /);( ;
pour londe réfléchie :
· &&&'!/#
.? 0) ( 1 .? !/# 0)($&&&&'% 1 .?2 34567!82 0 @ :? /);($&&&&'%
· .?2 34567!82 0 @ :? /); ;
et pour londe transmise :
· &&&'!/#
.A 0) ( 1 .A !/# 0)($&&&&'% 1 .A2 34567!82 0 9 :A /);($&&&&'%
· .A2 34567!82 0 9 :A /);( ;
où toutes les amplitudes .,2 , .?2 et .A2 sont des coefficients supposés réels.
C1.
Expliciter la condition aux limites à linterface pour la pression et montrer
quelle conduit à la
relation :
<,2 @
(R4)
C2.
Expliciter la condition aux limites à linterface pour la vitesse et montrer
quelle conduit à la
relation :
.,2 @ .?2 1 .A2 >
(R5)
C3.
Déduire des relations (R4) et (R5) les expressions des coefficients de
réflexion C 1
transmission 0 1
DHF
DGF
en amplitude, en fonction de += et de +B .
DEF
DGF
et de
On introduit le vecteur de Poynting acoustique réel I
&' associé au vecteur de Poynting
acoustique complexe I
&' défini par I
&' 1 .' où
KLI
KLI
&', MK
&', MK
C4.
C5.
C6.
Quelle est la signification physique du vecteur de Poynting I
&' ? Quelle est son unité usuelle ?
Exprimer Q et U en fonction de += et de +B .
En déduire que Q @ U 1 O. Que traduit cette relation ?
9
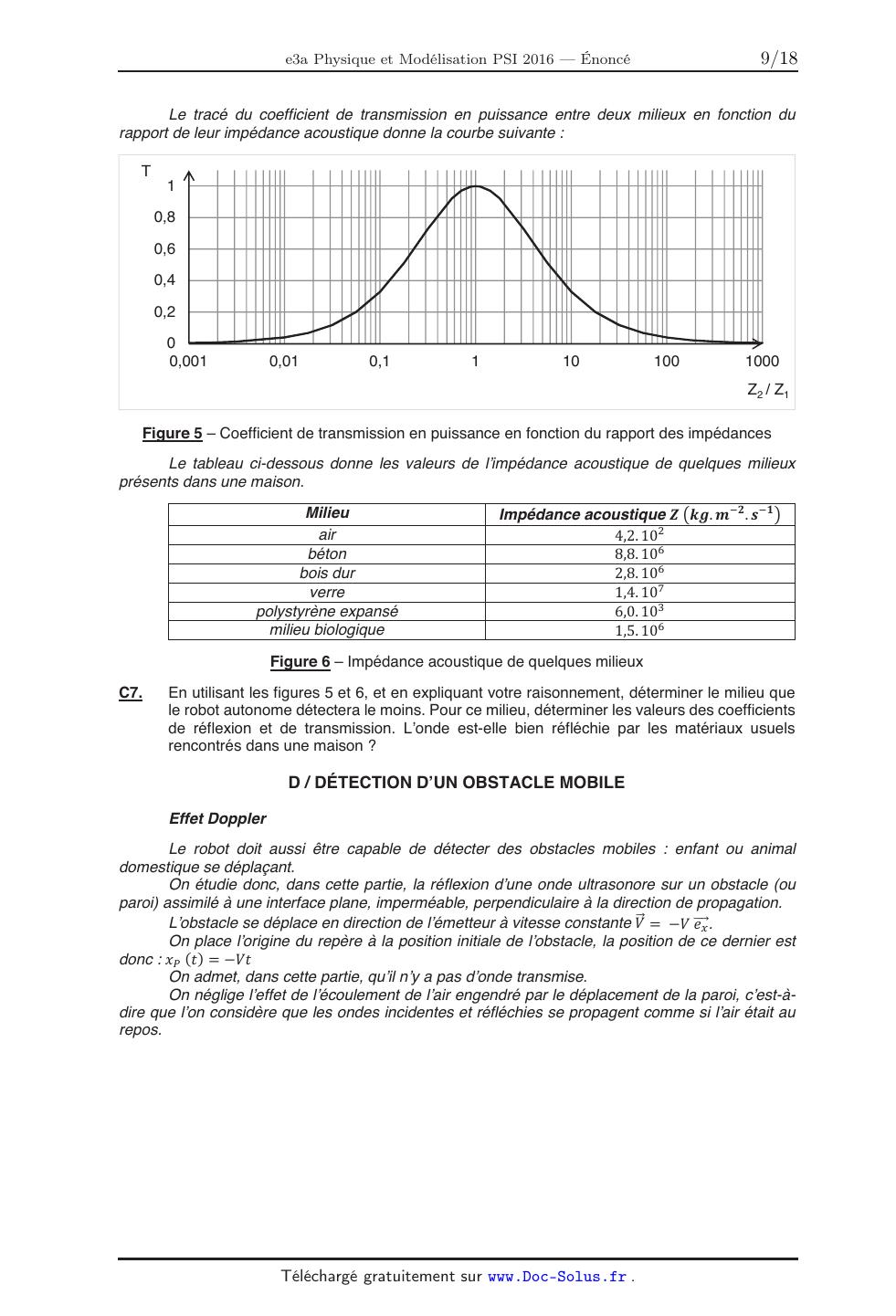
Le tracé du coefficient de transmission en puissance entre deux milieux en
fonction du
rapport de leur impédance acoustique donne la courbe suivante :
T
1
0,8
0,6
0,4
0,2
0
0,001
0,01
0,1
1
10
100
1000
Z2 / Z1
Figure 5 Coefficient de transmission en puissance en fonction du rapport des
impédances
Le tableau ci-dessous donne les valeurs de limpédance acoustique de quelques
milieux
présents dans une maison.
Milieu
air
béton
bois dur
verre
polystyrène expansé
milieu biologique
Impédance acoustique !"#$%& '() & *(+ ,
-./& 012
3.3& 014
/.3& 014
0.-& 015
6.1& 017
0.8& 014
Figure 6 Impédance acoustique de quelques milieux
C7.
En utilisant les figures 5 et 6, et en expliquant votre raisonnement,
déterminer le milieu que
le robot autonome détectera le moins. Pour ce milieu, déterminer les valeurs
des coefficients
de réflexion et de transmission. Londe est-elle bien réfléchie par les
matériaux usuels
rencontrés dans une maison ?
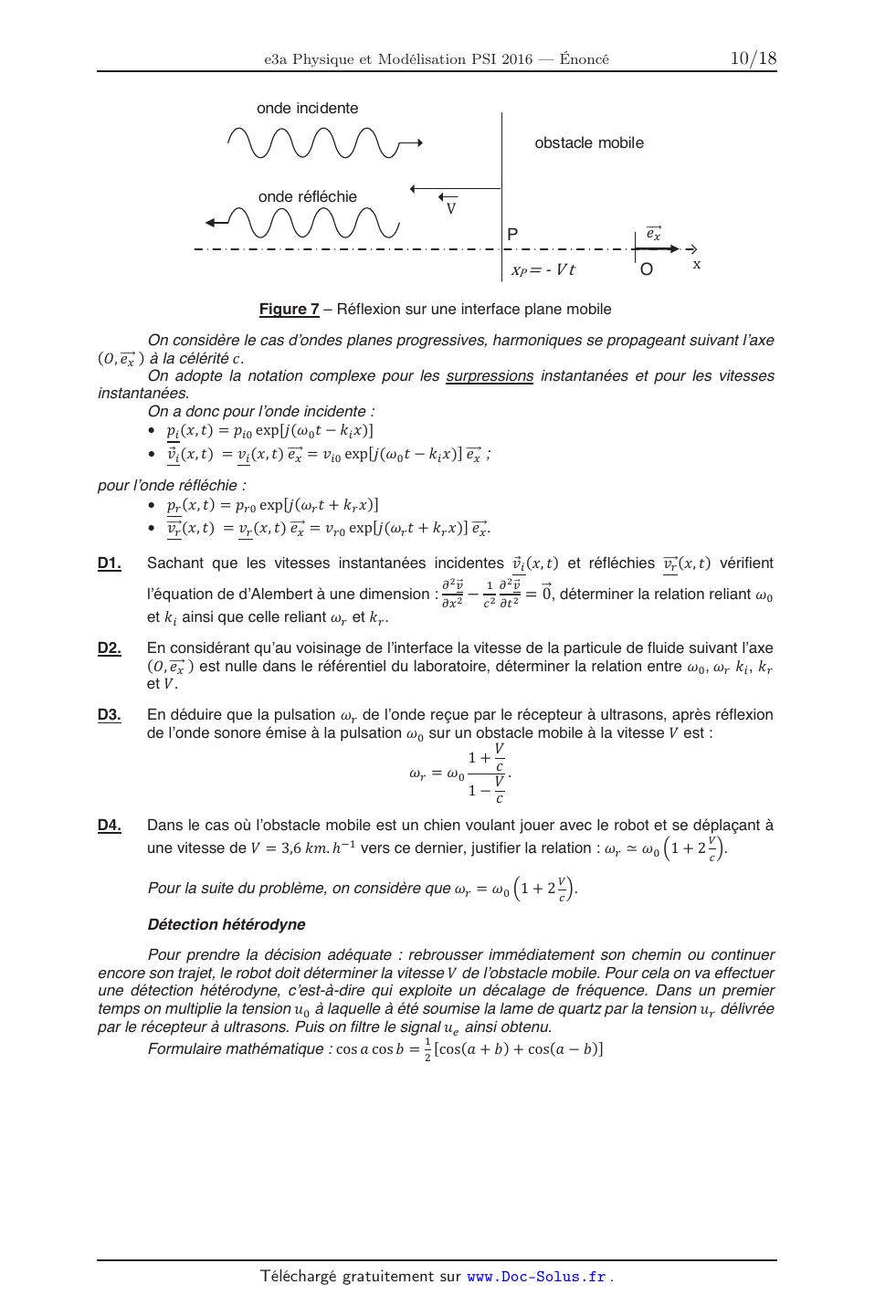
D / DÉTECTION DUN OBSTACLE MOBILE
Effet Doppler
Le robot doit aussi être capable de détecter des obstacles mobiles : enfant ou
animal
domestique se déplaçant.
On étudie donc, dans cette partie, la réflexion dune onde ultrasonore sur un
obstacle (ou
paroi) assimilé à une interface plane, imperméable, perpendiculaire à la
direction de propagation.
:; < " =9">::::;.
Lobstacle se déplace en direction de lémetteur à vitesse constante 9
?
On place lorigine du repère à la position initiale de lobstacle, la position de
ce dernier est
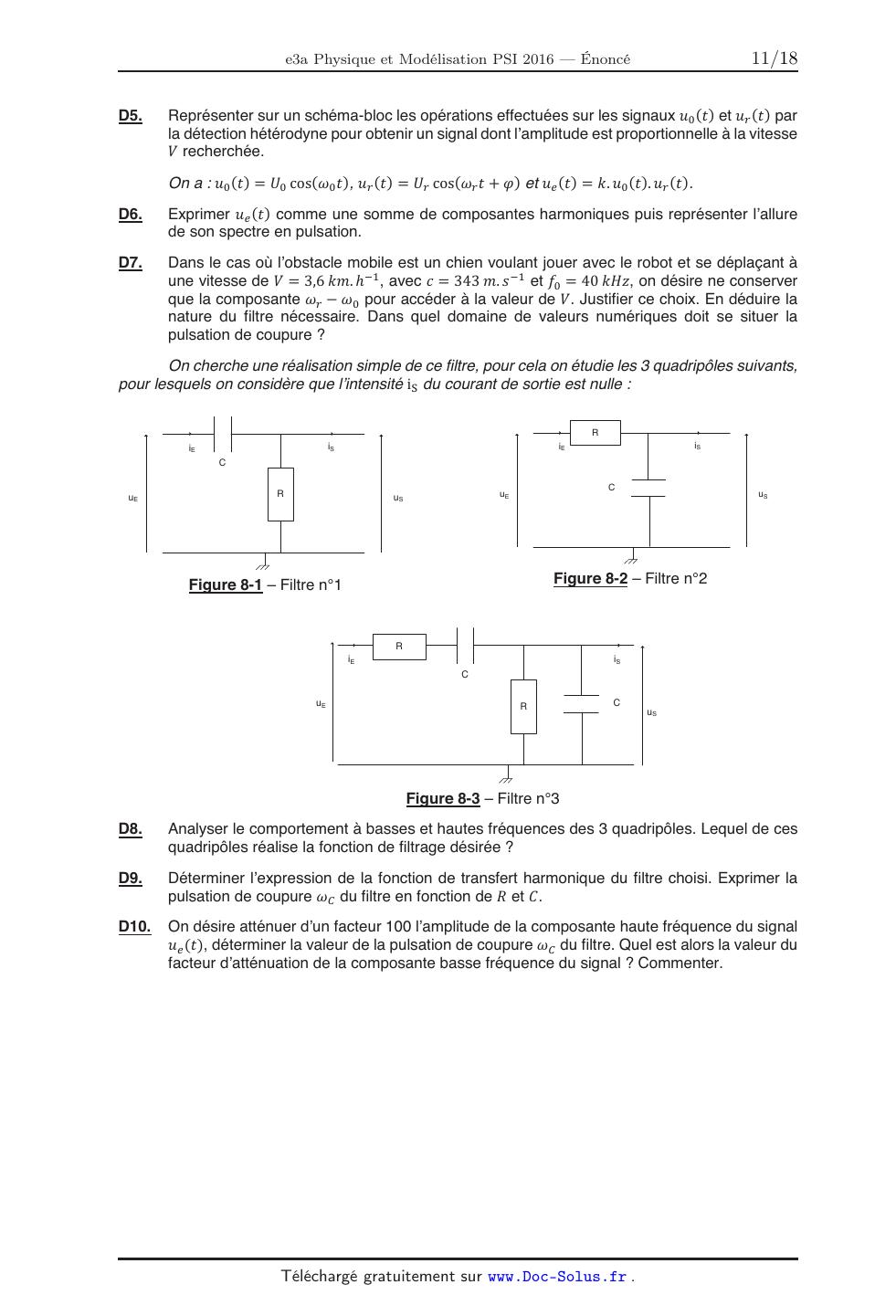
donc : @A "BCD < =9C" On admet, dans cette partie, quil ny a pas donde transmise. On néglige leffet de lécoulement de lair engendré par le déplacement de la paroi, cest-àdire que lon considère que les ondes incidentes et réfléchies se propagent comme si lair était au repos. Tournez la page S.V.P. 10 onde incidente obstacle mobile onde réfléchie " +, ----. P !#$%$&$"$'$ O ! Figure 7 Réflexion sur une interface plane mobile On considère le cas dondes planes progressives, harmoniques se propageant suivant laxe ()* +----.$/ , à la célérité 0. On adopte la notation complexe pour les surpressions instantanées et pour les vitesses instantanées. On a donc pour londe incidente : · 12 (3* 4/ % 125 6!789(:5 4 ; <2 3/= · >.2 (3* 4/ $ % >2 (3* 4/$+----., % >25 6!789(:5 4 ; <2 3/=$+----., ; pour londe réfléchie : · 1? (3* 4/ % 1?5 6!789(:? 4 @
---.(3*
4/ $ % >? (3* 4/$+----., % >?5 6!789(:? 4 @ .2 (3* 4/ et réfléchies
---.(3*
>? 4/ vérifient
léquation de dAlembert à une dimension :$
et <2 ainsi que celle reliant :? et " ( >>valeurs_R=calcul_R(serie1,serie2)
>>>moyenne(valeurs_R)
0.7667395640895386
>>>incertitude_type(valeurs_R)
0.002043940093438388
E9.
E10.
1
2
3
4
5
-->valeurs_R=calcul_R(serie1,serie2)
-->moyenne(valeurs_R)
0.7667396
-->incertitude_type(valeurs_R)
0.0020439
En déduire la valeur de # en précisant lincertitude élargie correspondant à un
niveau de
confiance de 95 %. Que représente lincertitude élargie ?
Du point du vue du codage des nombres flottants en machine, comment justifier
la différence
du nombre de chiffres significatifs fournis par scilab et python ?
F/ ESSAI À VIDE EN FONCTIONNEMENT GÉNÉRATEUR
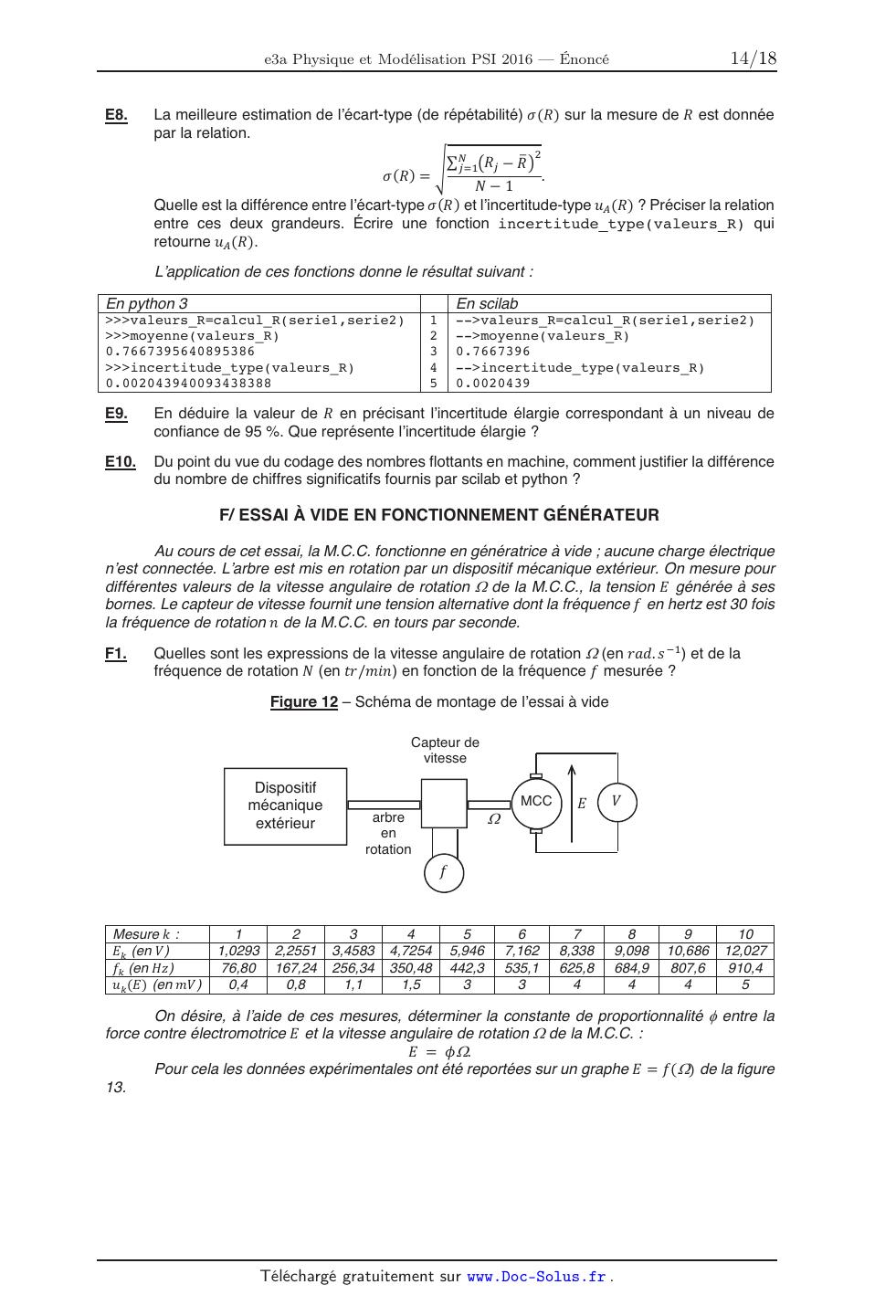
Au cours de cet essai, la M.C.C. fonctionne en génératrice à vide ; aucune
charge électrique
nest connectée. Larbre est mis en rotation par un dispositif mécanique
extérieur. On mesure pour
différentes valeurs de la vitesse angulaire de rotation ! de la M.C.C., la
tension 6 générée à ses
bornes. Le capteur de vitesse fournit une tension alternative dont la fréquence
7 en hertz est 30 fois
la fréquence de rotation 8 de la M.C.C. en tours par seconde.
F1.
Quelles sont les expressions de la vitesse angulaire de rotation ! (en 9:;3 < =0) et de la fréquence de rotation 1 (en >9?@A8) en fonction de la fréquence 7 mesurée ?
Figure 12 Schéma de montage de lessai à vide
Capteur de
vitesse
Dispositif
mécanique
extérieur
Mesure B :
6C (en D)
7C E(en FG)
4C "6$ (en @D)
1
1,0293
76,80
0,4
2
2,2551
167,24
0,8
arbre
en
rotation
3
3,4583
256,34
1,1
4
4,7254
350,48
1,5
MCC
!
6
D
7
5
5,946
442,3
3
6
7,162
535,1
3
7
8,338
625,8
4
8
9,098
684,9
4
9
10,686
807,6
4
10
12,027
910,4
5
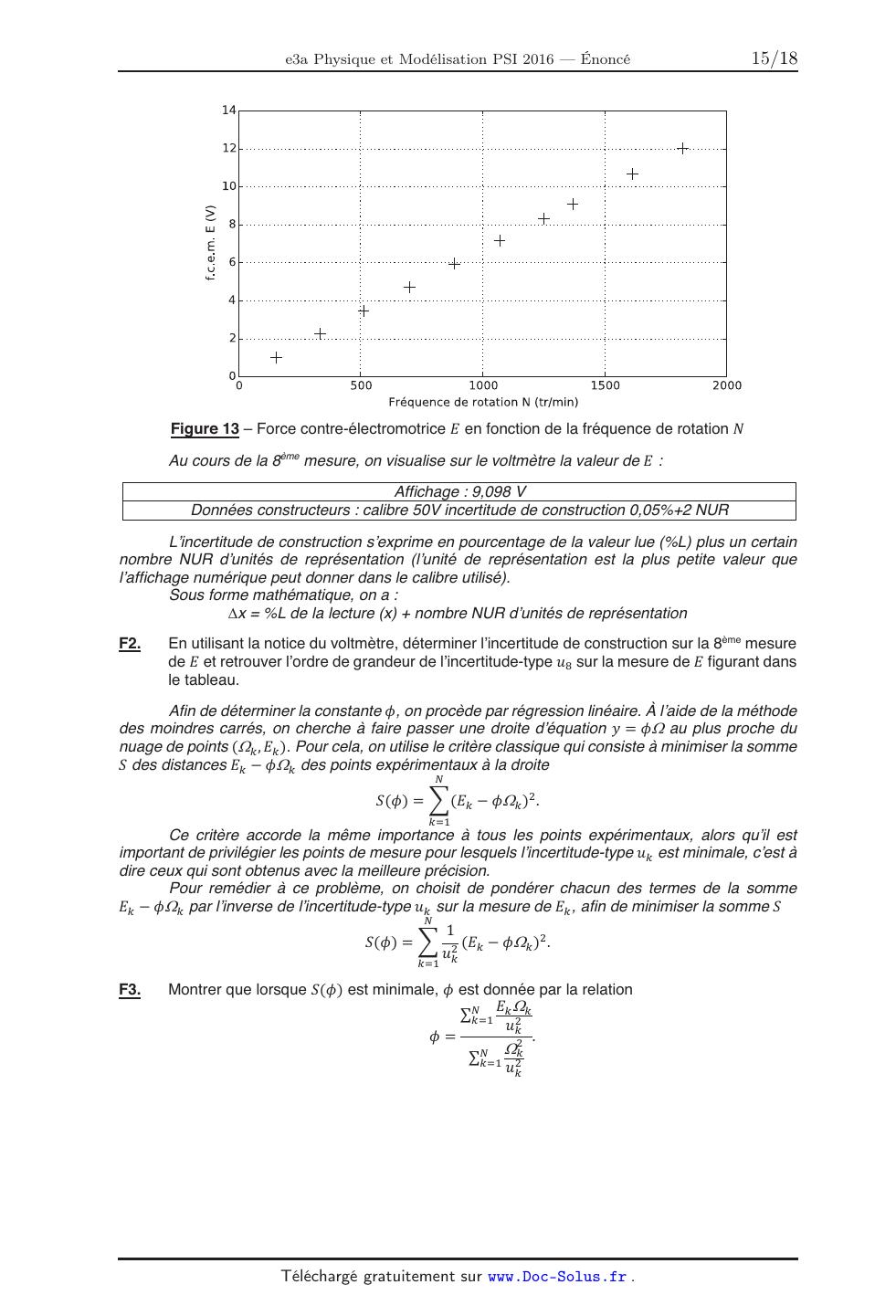
On désire, à laide de ces mesures, déterminer la constante de proportionnalité
" entre la
force contre électromotrice 6 et la vitesse angulaire de rotation ! de la
M.C.C. :
6E % EH!3
Pour cela les données expérimentales ont été reportées sur un graphe 6 % 7"!$
de la figure
13.
15
Figure 13 Force contre-électromotrice ! en fonction de la fréquence de
rotation "
Au cours de la 8ème mesure, on visualise sur le voltmètre la valeur de ! :
Affichage : 9,098 V
Données constructeurs : calibre 50V incertitude de construction 0,05%+2 NUR
Lincertitude de construction sexprime en pourcentage de la valeur lue (%L) plus
un certain
nombre NUR dunités de représentation (lunité de représentation est la plus
petite valeur que
laffichage numérique peut donner dans le calibre utilisé).
Sous forme mathématique, on a :
!x = %L de la lecture (x) + nombre NUR dunités de représentation
F2.
En utilisant la notice du voltmètre, déterminer lincertitude de construction
sur la 8ème mesure
de ! et retrouver lordre de grandeur de lincertitude-type #$ sur la mesure de !
figurant dans
le tableau.
Afin de déterminer la constante %, on procède par régression linéaire. À laide
de la méthode
des moindres carrés, on cherche à faire passer une droite déquation & ' %! au
plus proche du
nuage de points (!) * !) +. Pour cela, on utilise le critère classique qui
consiste à minimiser la somme
, des distances !) - %!) des points expérimentaux à la droite
1
,(%+ ' .(!) - %!) +/ 0
)23
Ce critère accorde la même importance à tous les points expérimentaux, alors
quil est
important de privilégier les points de mesure pour lesquels lincertitude-type
#) est minimale, cest à
dire ceux qui sont obtenus avec la meilleure précision.
Pour remédier à ce problème, on choisit de pondérer chacun des termes de la
somme
!) - %!) par linverse de lincertitude-type #) sur la mesure de !) , afin de
minimiser la somme ,
1
,(%+ ' .
)23
F3.
4
(! - %!) +/ 0
#)/ )
Montrer que lorsque ,(%+ est minimale, % est donnée par la relation
!) !)
51
)23
#)/
%'
0
!/)
1
5)23 /
#)
Tournez la page S.V.P.
16
Lincertitude-type sur la détermination de ! est donnée par
'
"# $!% &
!#)
*
()+, #
")
La fonction regression_linaire(x,y,u), définie ci-dessous, prend comme argument
trois listes de même taille contenant les valeurs expérimentales !) pour la
liste x, .) pour la liste y,
") pour la liste u.
En python 3
En scilab
def regression_lineaire(x,y,u):
c1=0
c2=0
n=len(x)
for i in range(n):
c1=c1+x[i]*y[i]/u[i]**2
c2=c2+(x[i]/u[i])**2
phi=c1/c2
u=1/c2**0.5
return [phi,u]
F4.
1
2
3
4
5
6
7
8
9
10
11
function[phi,u]=regression_lineaire(x,y,u)
c1=0
c2=0
n=length(x)
for i=1:n
c1=c1+x(i)*y(i)/u(i)^2
c2=c2+(x(i)/u(i))^2
end
phi=c1/c2,
u=(1/c2)^0.5
endfunction
On suppose que, suite à une erreur, les trois listes x, y et z ne possèdent pas
toutes le même
nombre déléments. Que se passe-t-il au moment de lexécution de la fonction si
la liste la
plus longue est x ?
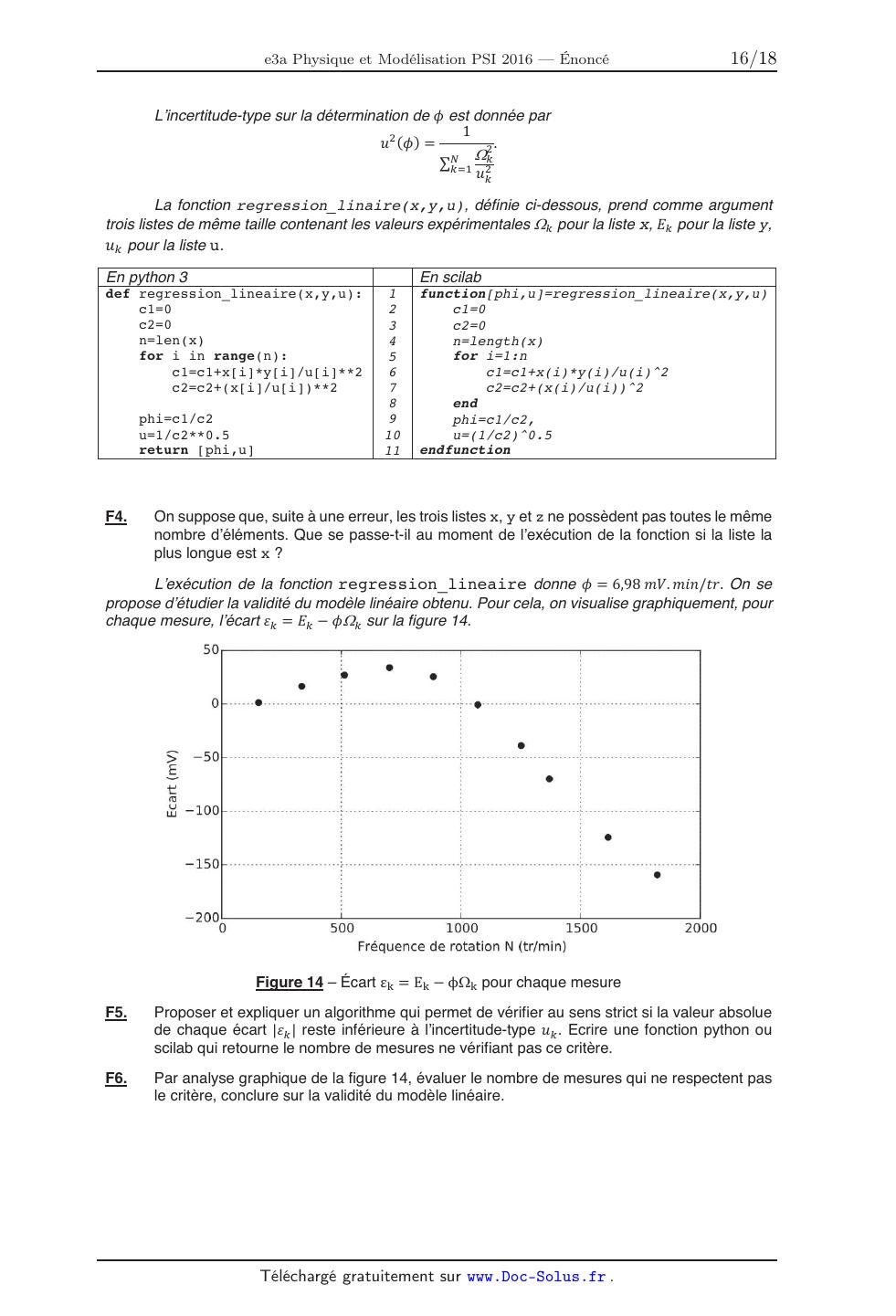
Lexécution de la fonction regression_lineaire donne ! & /012345- 46789:- On se
propose détudier la validité du modèle linéaire obtenu. Pour cela, on visualise
graphiquement, pour
chaque mesure, lécart ;) & .) < !!) sur la figure 14. Figure 14 Écart => & ?> < @!> pour chaque mesure
F5.
Proposer et expliquer un algorithme qui permet de vérifier au sens strict si la
valeur absolue
de chaque écart A;) A reste inférieure à lincertitude-type ") . Ecrire une
fonction python ou
scilab qui retourne le nombre de mesures ne vérifiant pas ce critère.
F6.
Par analyse graphique de la figure 14, évaluer le nombre de mesures qui ne
respectent pas
le critère, conclure sur la validité du modèle linéaire.
17
G/ ESSAI DE LÂCHÉ
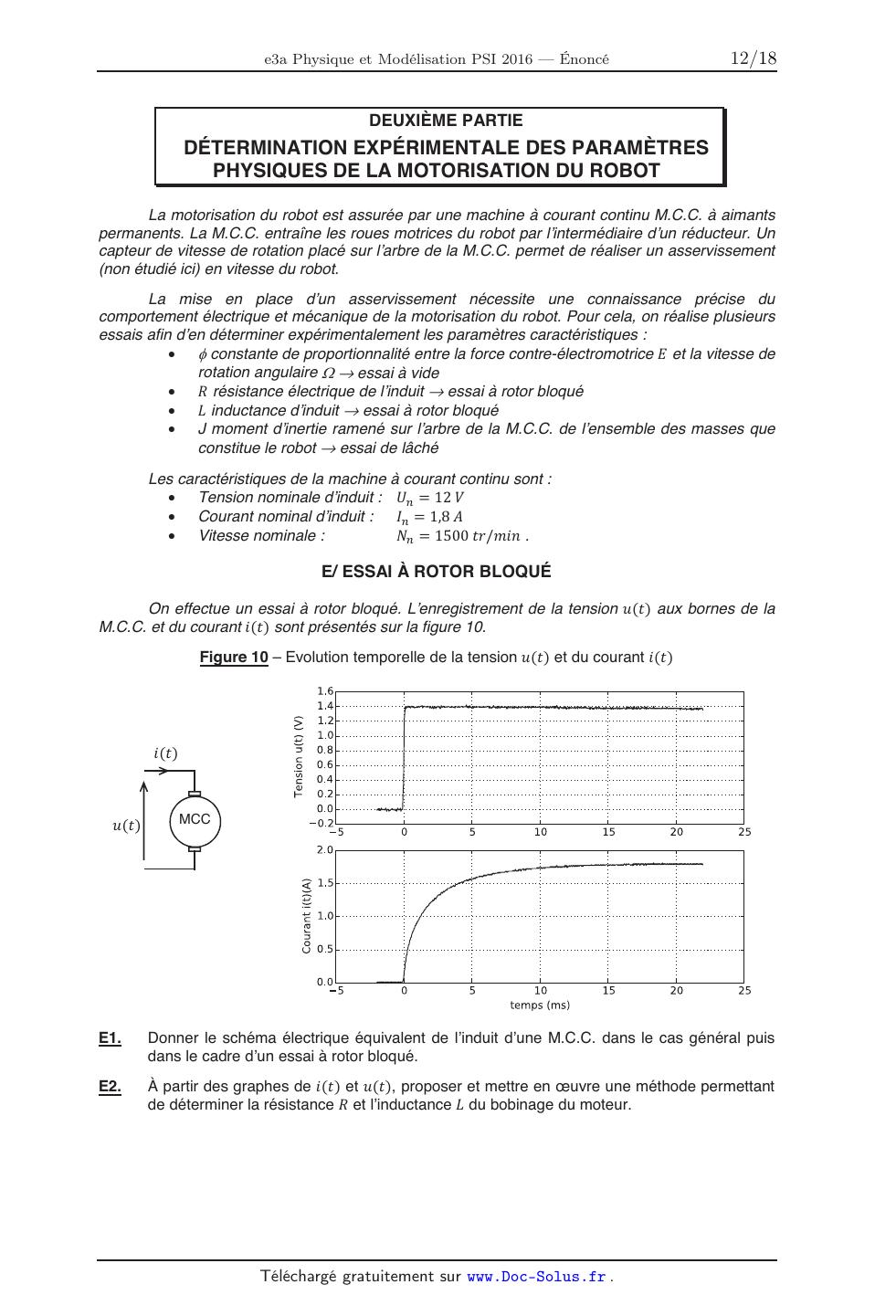
La machine à courant continu est alimentée par une source de tension et tourne
à sa vitesse
de rotation nominale. A linstant ! " #, la M.C.C. est déconnectée de la source
de tension. On
enregistre lévolution de sa vitesse angulaire de rotation !$%!&'
On note () " ()* + ,- le couple de frottement ramené sur larbre moteur, où ()*
est le couple
de frottement sec et , le coefficient de frottement visqueux. Le moment
dinertie ramené sur larbre
de la M.C.C. de lensemble des masses que constitue le robot est noté ..
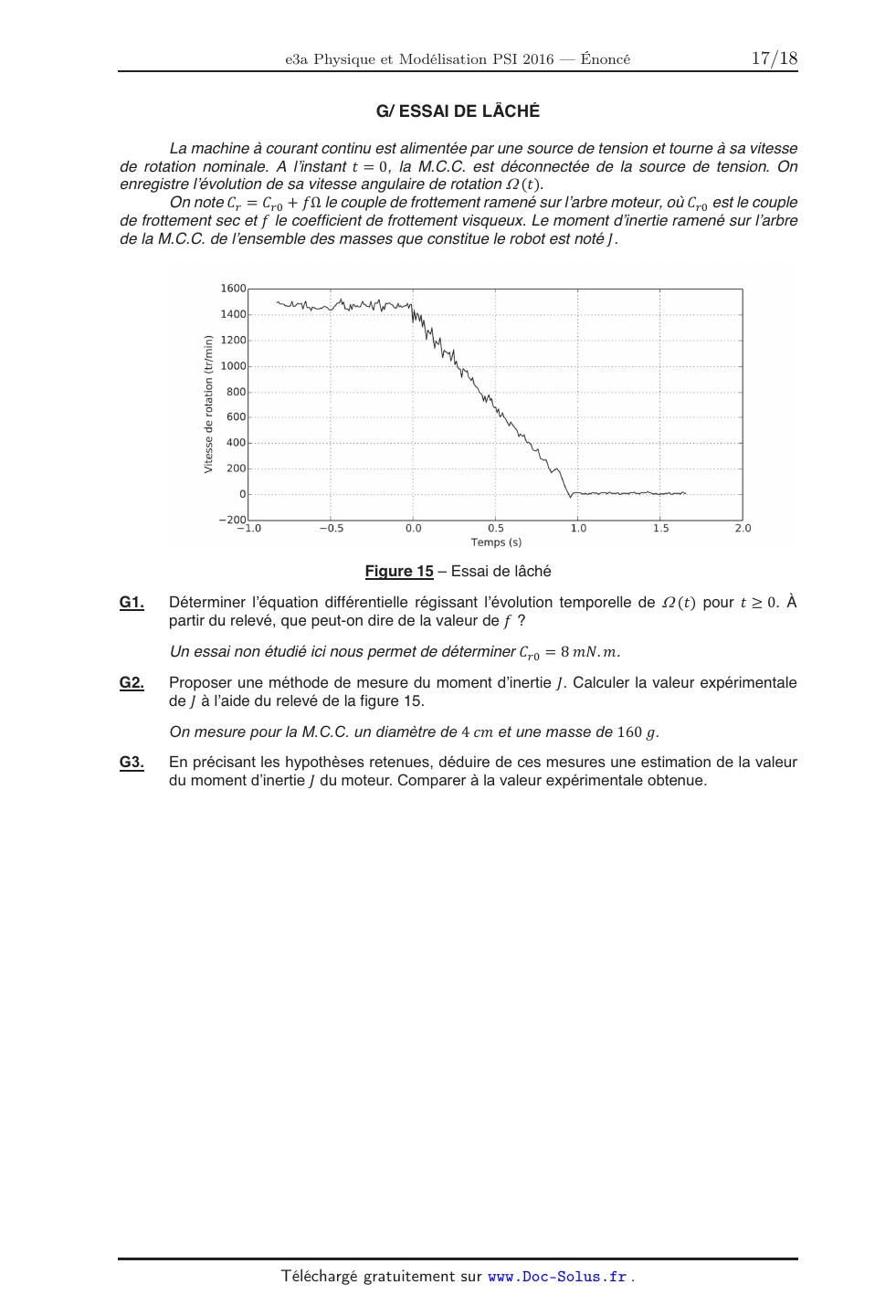
Figure 15 Essai de lâché
G1.
Déterminer léquation différentielle régissant lévolution temporelle de !$%!&
pour ! / #. À
partir du relevé, que peut-on dire de la valeur de , ?
Un essai non étudié ici nous permet de déterminer ()* " 0$12' 1.
G2.
Proposer une méthode de mesure du moment dinertie .. Calculer la valeur
expérimentale
de . à laide du relevé de la figure 15.
!"#$%&'(%#)*'(#+,#-././.#'"#01,$23(%#0%#3$41#%3#'"%#$,&&%#0%#56#$7.
!"#
!"#$%&'()*"+#,-)#./$0+.1)-)#%-+-"2-)3#4&42(%-#4-#'-)#5-)2%-)#2"-#-)+(5*+(0"#4-#,*#6*,-2%#
42#505-"+#47("-%+(-#.#42#50+-2%8#905$*%-%#:#,*#6*,-2%#-;$&%(5-"+*,-#0<+-"2-8 Tournez la page S.V.P. 18 TROISIÈME PARTIE ANNEXES EXTRAITS DE DOCUMENTATIONS POUR LIRE DANS UN FICHIER a) En Python f=open(name[ , mode[ , buffering ]]) Open a file, returning an File type object f. If the file cannot be opened, IOError is raised. name is the file name to be opened, and mode is a string indicating how the file is to be opened. The most commonly-used values of mode are 'r' for reading, 'w' for writing (truncating the file if it already exists), and 'a' for appending. f.readline() Reads a single line from the file ; a newline character (\n) is left at the end of the string, and is only omitted on the last line of the file if the file doesnt end in a newline. If f.readline() returns an empty string, the end of the file has been reached, while a blank line is represented by \n, a string containing only a single newline. f.readlines() Return a list of lines from the stream. f.close() When youre done with a file, call this function to close it and free up any system resources taken up by the open file. After calling f.close(), attempts to use the file object will automatically fail. b) En Scilab fd = mopen(file [, mode ]) opens a file in Scilab fd, a scalar : a file descriptor (its a positive integer). file : a character string containing the path of the file to open. mode : a character string specifying the access mode requested for the file. The parameter can have one of the following values : r : opens for reading (default). The file must exist, otherwise it fails. w : opens for writing. If the file exists, its contents are destroyed. a : opens for appending. It creates the file if it does not exist. mclose(fd) closes an opened file. fd, a scalar : the fd parameter returned by the function mopen is used as a file descriptor. txt = mgetl(file_desc [,m]) mgetl function allows to read a lines from an text file. file_desc, a character string giving the file name or an integer giving a logical unit returned by mopen. m, an integer scalar : a number of lines to read. Default value is -1. txt, a column vector of strings. If m is omitted or is -1 all lines till end of file occurs are read. If m is given mgetl tries to read exactly m lines. SYNTAXES PYTHON ET SCILAB En python, certaines des fonctions suivantes sont définies dans la librairie numpy. Convertir une chaîne de caractères en flottant Liste de valeurs équiréparties de 0 à 4 par pas de 0.1 Caractères spéciaux Tracé de y en fonction de x En python 3 En scilab float('14.32') float('-4.32\n') Evstr('14.32') linspace(0,4,41) 0:0.1:4 tabulation : \t Retour à la ligne : \n plot(x,y) plot(x,y) FIN DE LÉPREUVE