
CCINP Modélisation et Ingénierie numérique PSI 2025
| Thème de l'épreuve | Modélisation d'un lève-fauteuil |
| Principaux outils utilisés | électrochimie, électronique de Puissance, moteur, cinématique, statique, asservissement, commande numérique |
| Mots clefs | moteur à courant continu, Mobilikit, courbes intensité-potentiel, hacheur, vérin, système à barres, profil de vitesse |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - -
Énoncé complet
(télécharger le PDF)



Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
SESSION 2025
PSI3MO
ÉPREUVE SPÉCIFIQUE - FILIÈRE PSI
____________________
MODÉLISATION ET INGÉNIERIE NUMÉRIQUE
Durée : 4 heures
____________________
N.B. : le candidat attachera la plus grande importance à la clarté, à la
précision et à la concision de la rédaction.
Si un candidat est amené à repérer ce qui peut lui sembler être une erreur
d'énoncé, il le signalera sur sa copie
et devra poursuivre sa composition en expliquant les raisons des initiatives
qu'il a été amené à prendre.
RAPPEL DES CONSIGNES
·
·
·
Utiliser uniquement un stylo noir ou bleu foncé non effaçable pour la rédaction
de votre composition ; d'autres
couleurs, excepté le vert, bleu clair ou turquoise, peuvent être utilisées,
mais exclusivement pour les schémas
et la mise en évidence des résultats.
Ne pas utiliser de correcteur.
Écrire le mot FIN à la fin de votre composition.
______________________________________________________________________________
Les calculatrices sont interdites.
Le sujet est composé de sept parties.
Énoncé : 17 pages
Annexes : 3 pages
1/20
Modélisation d'un Lève-fauteuil
Introduction - Présentation du Mobilikit
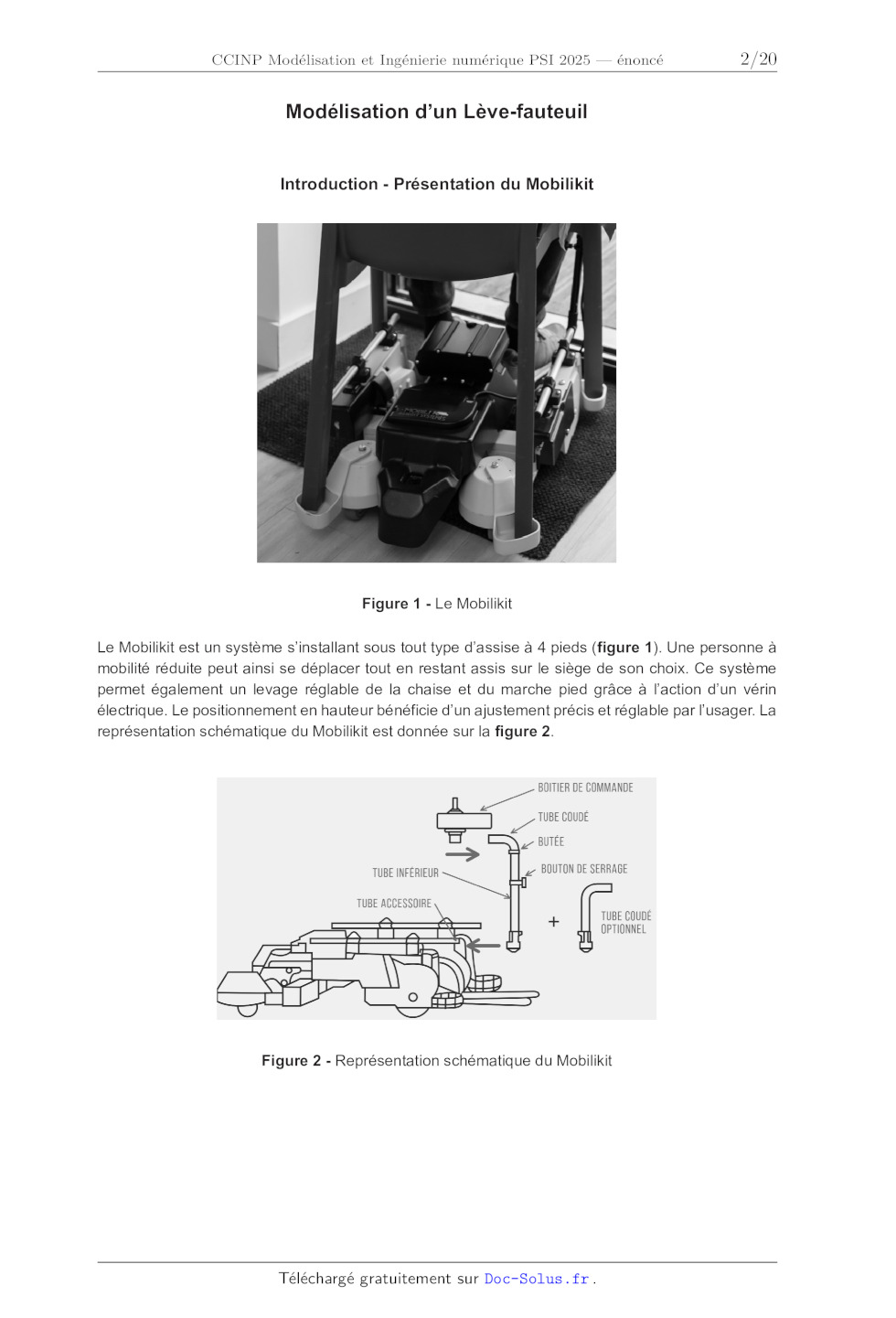
Figure 1 - Le Mobilikit
Le Mobilikit est un système s'installant sous tout type d'assise à 4 pieds
(figure 1). Une personne à
mobilité réduite peut ainsi se déplacer tout en restant assis sur le siège de
son choix. Ce système
permet également un levage réglable de la chaise et du marche pied grâce à
l'action d'un vérin
électrique. Le positionnement en hauteur bénéficie d'un ajustement précis et
réglable par l'usager. La
représentation schématique du Mobilikit est donnée sur la figure 2.
Figure 2 - Représentation schématique du Mobilikit
2/20
L'objectif du sujet est la modélisation des composants du système permettant
d'assurer la fonction
d'élévation, pour en comprendre le fonctionnement et valider les choix du
constructeur.
La partie I donne les propriétés de la batterie et met en évidence la chute de
tension à ses bornes
lorsqu'elle débite un courant.
La partie II présente le montage d'électronique de puissance permettant la
commande du vérin électrique à la montée et à la descente du fauteuil.
La partie III propose une modélisation du vérin électrique.
La partie IV étudie la commande du soulèvement de la chaise et du marchepied.
La partie V permet de valider les performances du vérin.
La partie VI permet de modéliser la vitesse de montée et de descente.
La partie VII va permettre de modéliser la commande du système de levage.
Partie I - Batterie du Mobilikit
Le Mobilikit étant un système autonome, il comporte une source d'énergie
embarquée qui alimente
le vérin électrique de levage ainsi que le moteur électrique qui assure
l'entraînement des roues. Les
concepteurs du Mobilikit ont choisi une batterie lithium-ion dont les
caractéristiques globales sont :
- la capacité correspondant à la charge électrique totale qu'elle peut débiter
C = 9,0 A·h
- la tension nominale U = 25 V
- l'énergie qu'elle est susceptible de délivrer E = 225 W·h.
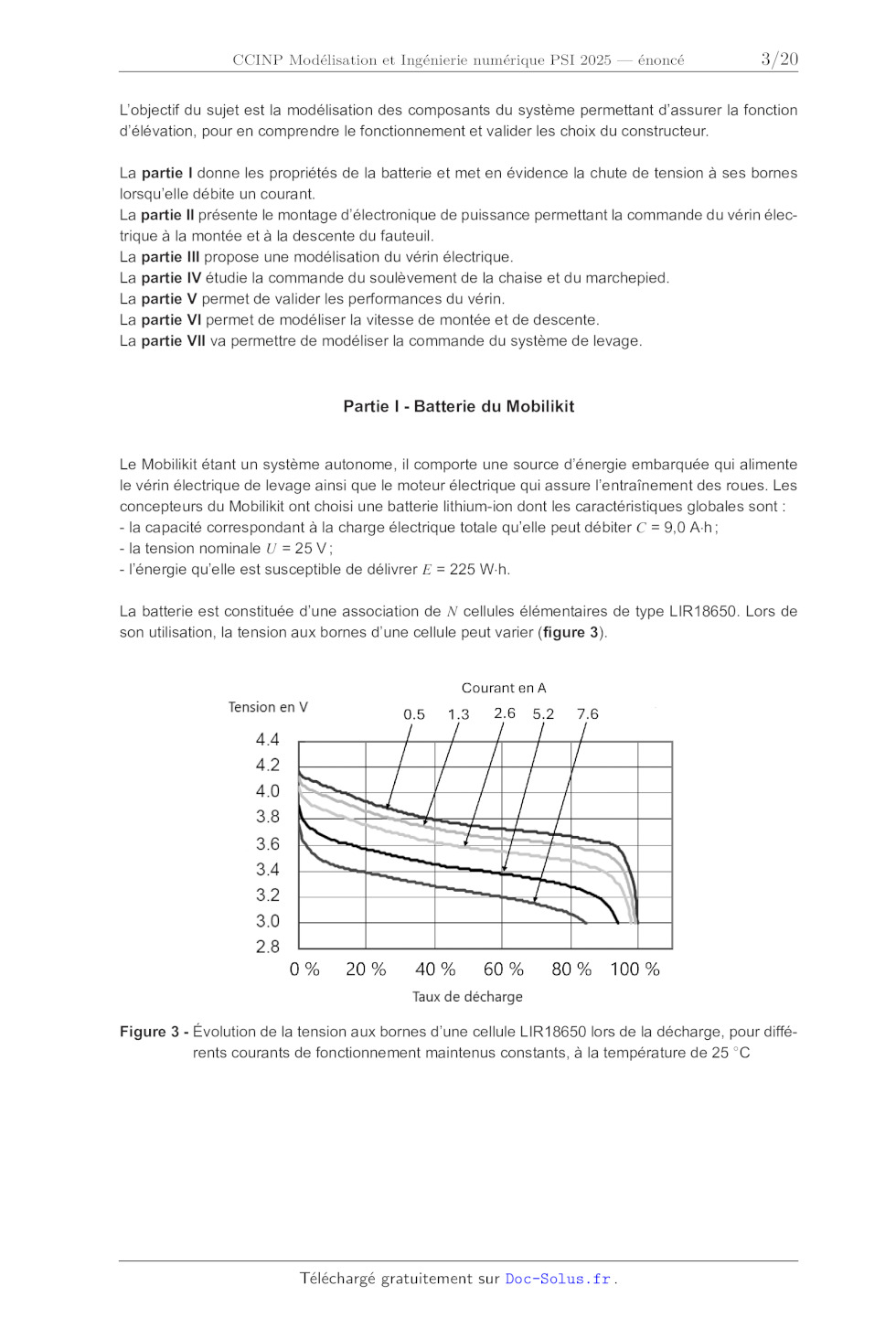
La batterie est constituée d'une association de N cellules élémentaires de type
LIR18650. Lors de
son utilisation, la tension aux bornes d'une cellule peut varier (figure 3).
Figure 3 - Évolution de la tension aux bornes d'une cellule LIR18650 lors de la
décharge, pour différents courants de fonctionnement maintenus constants, à la
température de 25 C
3/20
L'objectif de cette partie est d'évaluer et d'interpréter l'évolution de la
tension délivrée par cette batterie lors du fonctionnement. Le cahier des
charges indique une chute de tension limitée à 5 %.
Q1. Vérifier la cohérence entre les trois données C, U et E. Quel nombre N de
cellules élémentaires
faut-il associer en série pour obtenir une tension égale à la tension nominale
lors d'un fonctionnement
à 50 % de taux de décharge avec un courant de 2,6 A ? On s'appuiera sur les
courbes de la figure 3.
Q2. La notice du Mobilikit indique que l'appareil peut se déplacer à une
vitesse maximale Vmax de
4,0 km·h-1 et parcourir une distance maximale dmax de 12 km. Calculer la durée
de fonctionnement
t, puis l'intensité i du courant fournie par la batterie lors d'un déplacement
du Mobilikit de la distance
dmax , à la vitesse Vmax , en supposant la batterie complétement chargée.
Q3. Pour un taux de charge de 100 %, quel est l'ordre de grandeur de la
variation de tension aux
bornes de la batterie lorsque celle-ci passe d'un courant de fonctionnement de
0,5 A à un courant de
fonctionnement de 7,6 A ? Montrer que cette variation dépasse les 5 % souhaités.
Pour limiter la chute de tension dans la batterie, celle-ci comporte 4 lignes
de N cellules en série. Le
courant débité est ainsi divisé par 4. Cela limite la chute de tension et
permet de valider le cahier des
charges.
On se propose à présent d'interpréter qualitativement l'allure des courbes de
décharge à l'aide de la
notion de courbe intensité-potentiel.
Les couples oxdydant-réducteur intervenant dans la cellule lors de la décharge
sont Li+ /LiFePO4 (s)
à la cathode de potentiel E1 et Li+ /LiC6 (s) à l'anode de potentiel E2 . À
courant nul, les électrodes sont
à leur potentiel de Nernst, de la forme :
E1,eq = E1 + k log a1
et
E2,eq = E2 + k log a2
avec E1 le potentiel standard du couple Li+ /LiFePO4 (s), E2 le potentiel
standard du couple Li+ /LiC6 (s),
a1 et a2 les activités de l'ion lithium dans les compartiments cathodique et
anodique, et k une constante
positive dépendant de la température.
Q4. Justifier que E1 > E2 .
Q5. Comment évoluent les concentrations en Li+ à l'anode et à la cathode lors
de la décharge ?
Comment évoluent E1,eq et E2,eq ? Interpréter qualitativement l'allure des
courbes de décharge de la
figure 3, à courant fixé.
Q6. Tracer l'allure des courbes intensité-potentiel à l'anode et à la cathode,
en indiquant sur chacune
les espèces chimiques qui interviennent. On prendra E1,eq = 0,6 V et E2,eq = -
2,9 V. Les couples
seront considérés rapides et les paliers de diffusion non atteints. Placer un
point de fonctionnement
pour un courant i0 non nul. Comment évolue la force électromotrice E1 - E2
lorsque i0 augmente ?
Faire le lien avec la figure 3.
4/20
Partie II - Commande du vérin
L'utilisateur du Mobilikit dispose d'un joystick qui lui permet de régler le
positionnement de son siège
en pilotant le vérin par l'intermédiaire d'une carte électronique. Elle
comporte un hacheur réversible
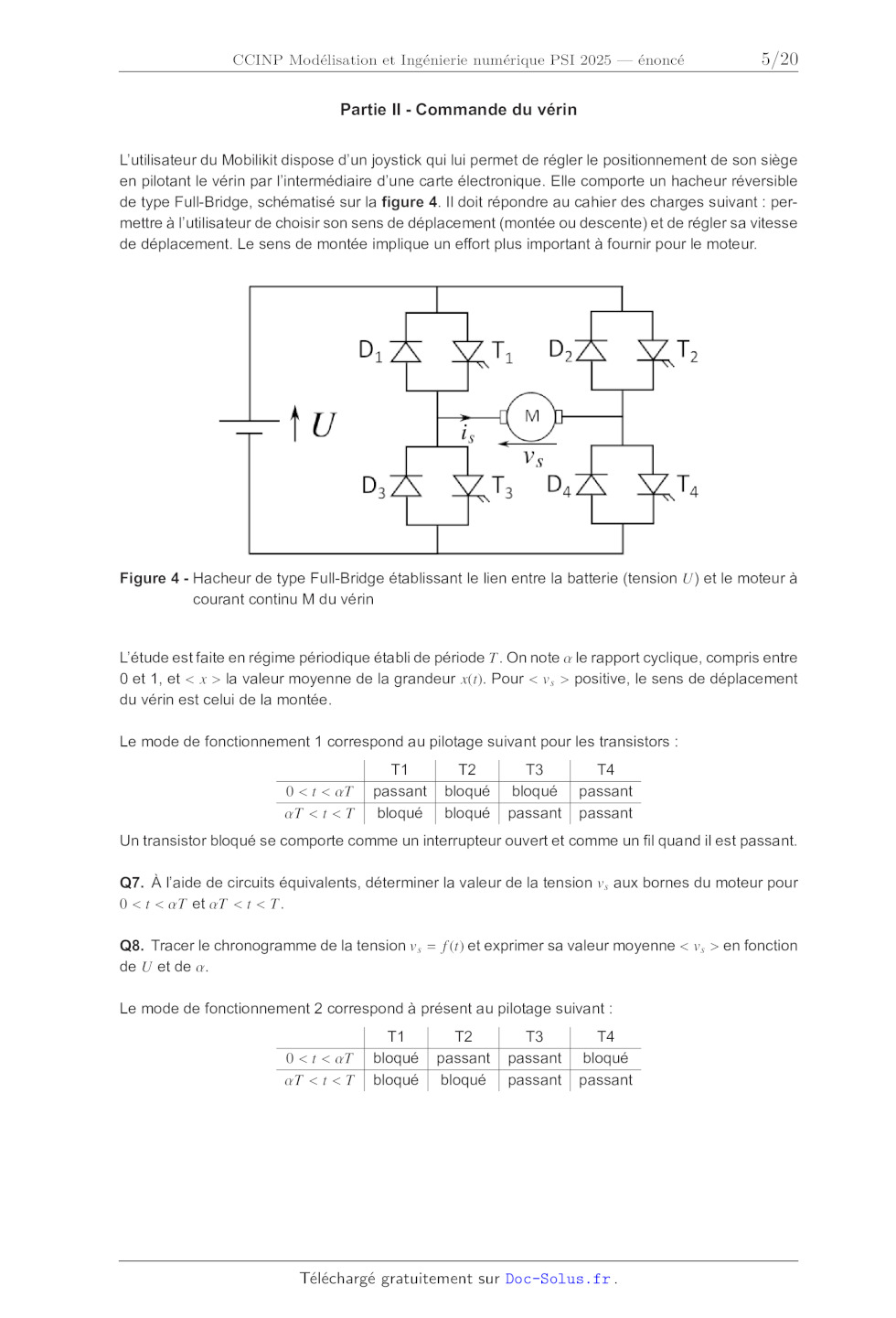
de type Full-Bridge, schématisé sur la figure 4. Il doit répondre au cahier des
charges suivant : permettre à l'utilisateur de choisir son sens de déplacement
(montée ou descente) et de régler sa vitesse
de déplacement. Le sens de montée implique un effort plus important à fournir
pour le moteur.
Figure 4 - Hacheur de type Full-Bridge établissant le lien entre la batterie
(tension U) et le moteur à
courant continu M du vérin
L'étude est faite en régime périodique établi de période T . On note le
rapport cyclique, compris entre
0 et 1, et < x > la valeur moyenne de la grandeur x(t). Pour < v s > positive,
le sens de déplacement
du vérin est celui de la montée.
Le mode de fonctionnement 1 correspond au pilotage suivant pour les transistors
:
0 < t < T T < t < T T1 passant bloqué T2 bloqué bloqué T3 bloqué passant T4 passant passant Un transistor bloqué se comporte comme un interrupteur ouvert et comme un fil quand il est passant. Q7. À l'aide de circuits équivalents, déterminer la valeur de la tension v s aux bornes du moteur pour 0 < t < T et T < t < T . Q8. Tracer le chronogramme de la tension v s = f (t) et exprimer sa valeur moyenne < v s > en fonction
de U et de .
Le mode de fonctionnement 2 correspond à présent au pilotage suivant :
0 < t < T T < t < T T1 bloqué bloqué T2 passant bloqué 5/20 T3 passant passant T4 bloqué passant Q9. Sans justification, tracer le chronogramme de v s pour le mode de fonctionnement 2. En déduire la valeur moyenne < v s > .
Q10. Considérons une phase de montée et une phase de descente de même vitesse.
Le rapport
cyclique sera-t-il identique ? Justifier.
Partie III - Étude du moteur du vérin électrique
Le moteur alimenté par le hacheur de la partie précédente est celui du vérin
électrique. Les concepteurs ont choisi le modèle de vérin électrique
RE1004-Strong3 dont le principe de fonctionnement est
le suivant : un moteur à courant continu (moteur cc), associé à un réducteur,
met en rotation une vis
qui entraîne un écrou lié au siège en translation.
L'objectif de cette partie est d'étudier les pertes du vérin à partir des
essais expérimentaux.
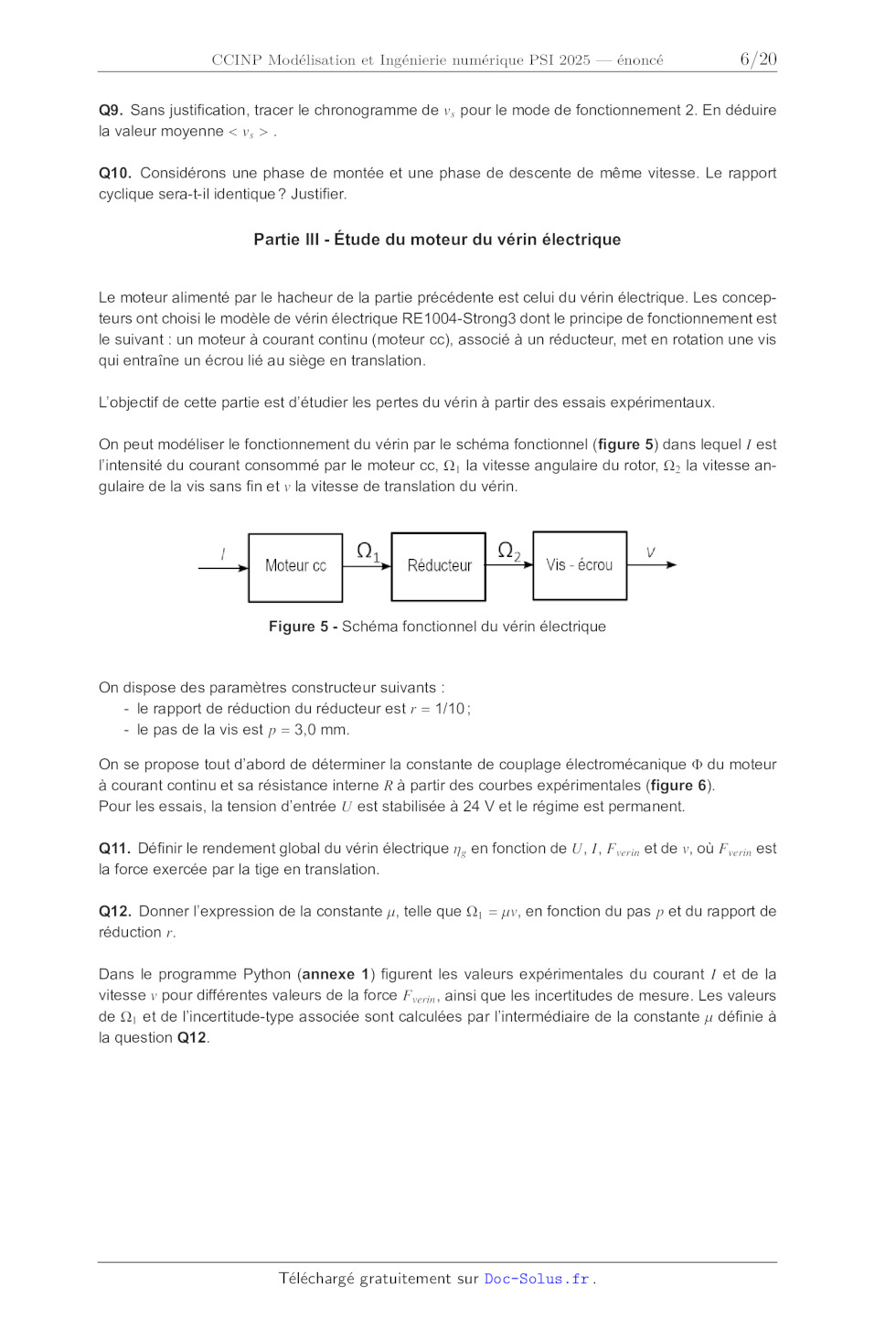
On peut modéliser le fonctionnement du vérin par le schéma fonctionnel (figure
5) dans lequel I est
l'intensité du courant consommé par le moteur cc, 1 la vitesse angulaire du
rotor, 2 la vitesse angulaire de la vis sans fin et v la vitesse de translation
du vérin.
Figure 5 - Schéma fonctionnel du vérin électrique
On dispose des paramètres constructeur suivants :
- le rapport de réduction du réducteur est r = 1/10
- le pas de la vis est p = 3,0 mm.
On se propose tout d'abord de déterminer la constante de couplage
électromécanique du moteur
à courant continu et sa résistance interne R à partir des courbes
expérimentales (figure 6).
Pour les essais, la tension d'entrée U est stabilisée à 24 V et le régime est
permanent.
Q11. Définir le rendement global du vérin électrique g en fonction de U, I,
Fverin et de v, où Fverin est
la force exercée par la tige en translation.
Q12. Donner l'expression de la constante µ, telle que 1 = µv, en fonction du
pas p et du rapport de
réduction r.
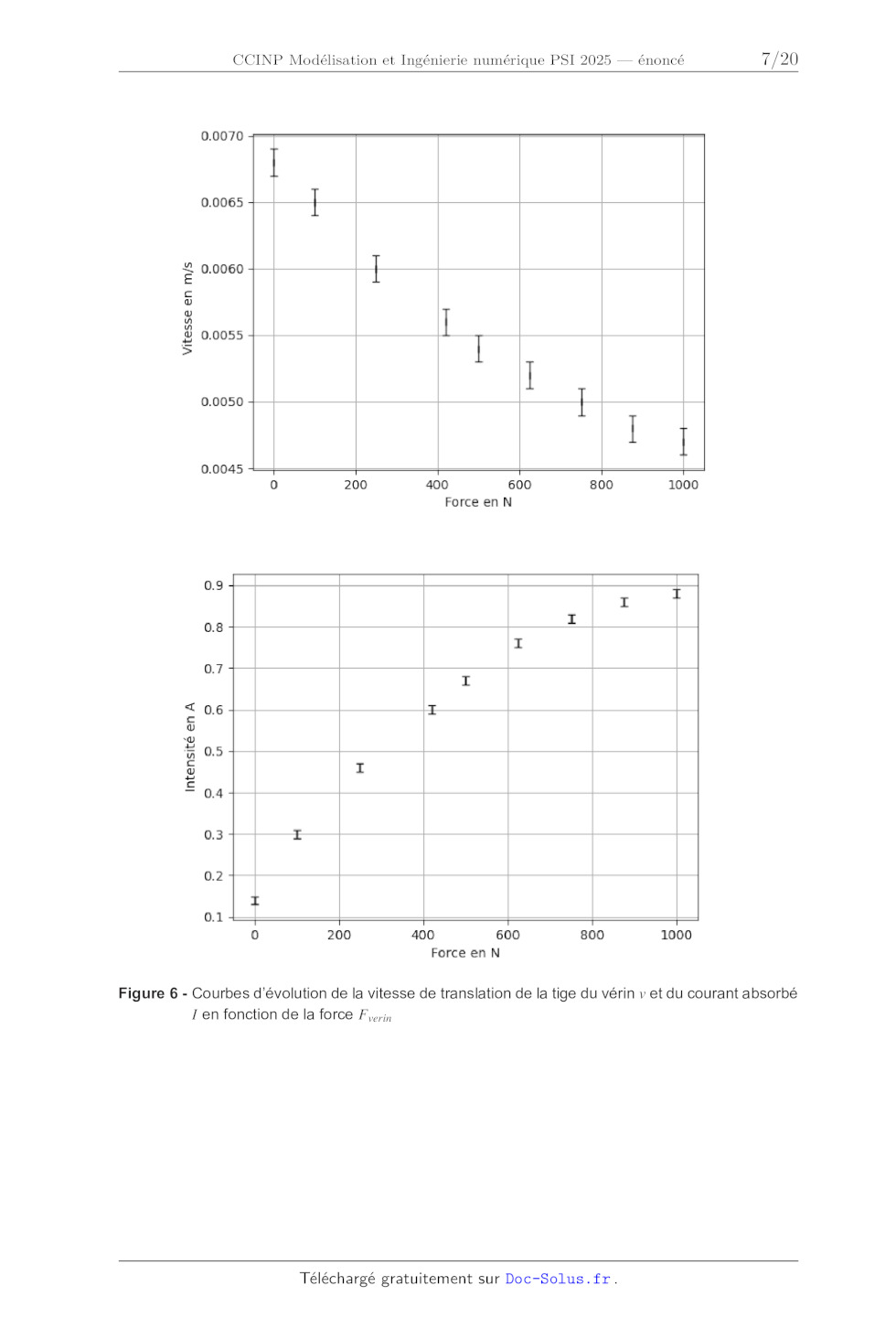
Dans le programme Python (annexe 1) figurent les valeurs expérimentales du
courant I et de la
vitesse v pour différentes valeurs de la force Fverin , ainsi que les
incertitudes de mesure. Les valeurs
de 1 et de l'incertitude-type associée sont calculées par l'intermédiaire de la
constante µ définie à
la question Q12.
6/20
Figure 6 - Courbes d'évolution de la vitesse de translation de la tige du vérin
v et du courant absorbé
I en fonction de la force Fverin
7/20
Q13. Donner le schéma électrique équivalent du moteur à courant continu
fonctionnant en régime
permanent (la force contre-électromotrice sera notée E ). En déduire
l'équation électrique du moteur,
puis la relation :
U R
- I
1 =
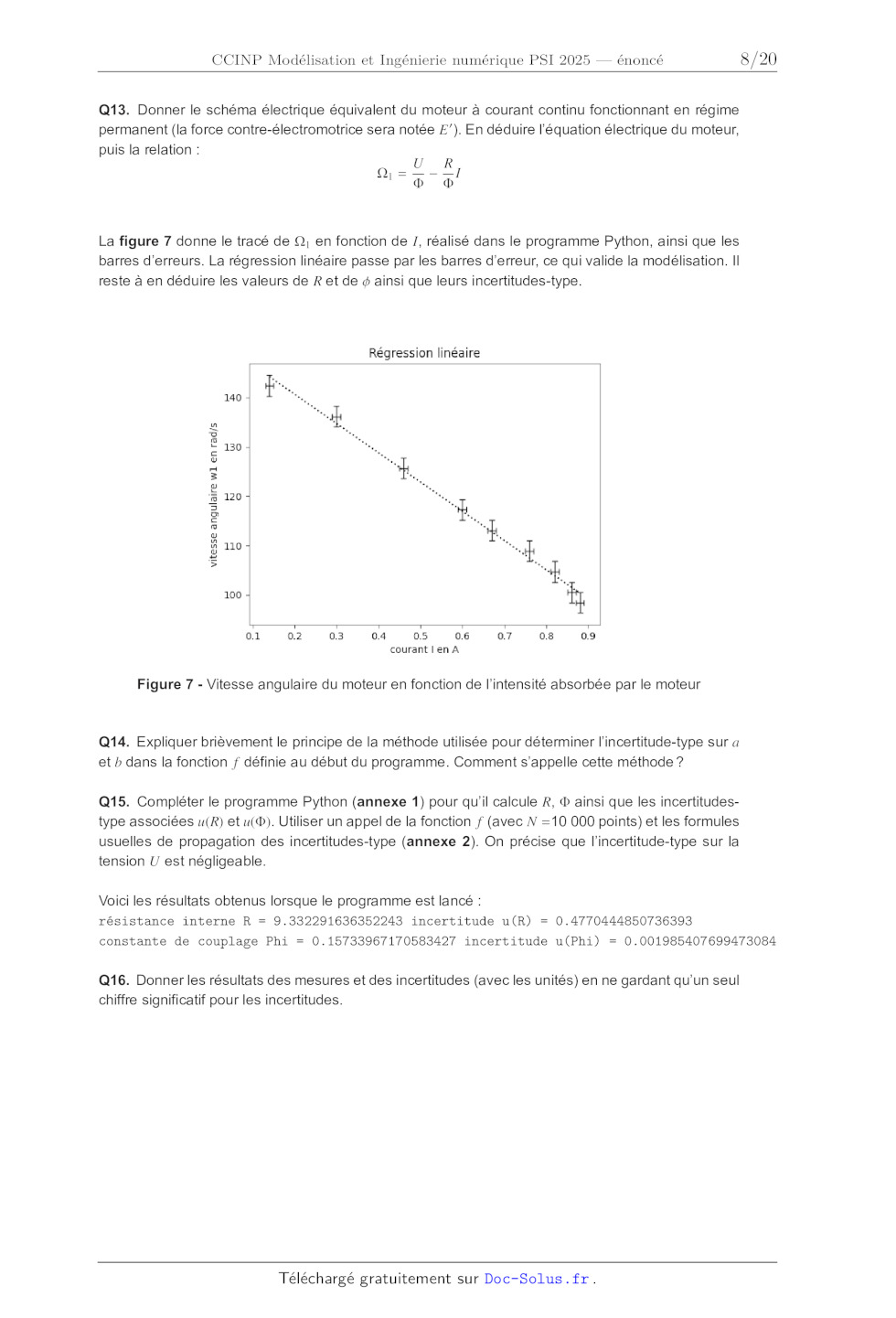
La figure 7 donne le tracé de 1 en fonction de I, réalisé dans le programme
Python, ainsi que les
barres d'erreurs. La régression linéaire passe par les barres d'erreur, ce qui
valide la modélisation. Il
reste à en déduire les valeurs de R et de ainsi que leurs incertitudes-type.
Figure 7 - Vitesse angulaire du moteur en fonction de l'intensité absorbée par
le moteur
Q14. Expliquer brièvement le principe de la méthode utilisée pour déterminer
l'incertitude-type sur a
et b dans la fonction f définie au début du programme. Comment s'appelle cette
méthode ?
Q15. Compléter le programme Python (annexe 1) pour qu'il calcule R, ainsi que
les incertitudestype associées u(R) et u(). Utiliser un appel de la fonction f
(avec N =10 000 points) et les formules
usuelles de propagation des incertitudes-type (annexe 2). On précise que
l'incertitude-type sur la
tension U est négligeable.
Voici les résultats obtenus lorsque le programme est lancé :
résistance interne R = 9.332291636352243 incertitude u(R) = 0.4770444850736393
constante de couplage Phi = 0.15733967170583427 incertitude u(Phi) =
0.001985407699473084
Q16. Donner les résultats des mesures et des incertitudes (avec les unités) en
ne gardant qu'un seul
chiffre significatif pour les incertitudes.
8/20
Pour évaluer les pertes en détail, on réalise un bilan de puissance global.
Pour cela, on définit les
puissances suivantes :
- Pe puissance électrique d'entrée,
- P s puissance mécanique de sortie,
- P J puissance dissipée par effet joule dans l'induit,
- P p la puissance dissipée par les pertes fer et par tous les frottements
mécaniques,
- em le couple électromagnétique,
- p le couple de pertes, modélisant les pertes fer et toutes les pertes par
frottement mécanique,
- u le couple utile, défini par la relation Pu = u 1 .
Q17. En appliquant le Théorème du Moment Cinétique (TMC) en régime permanent,
donner la relation entre les trois couples lorsque le moteur tourne à vitesse
constante.
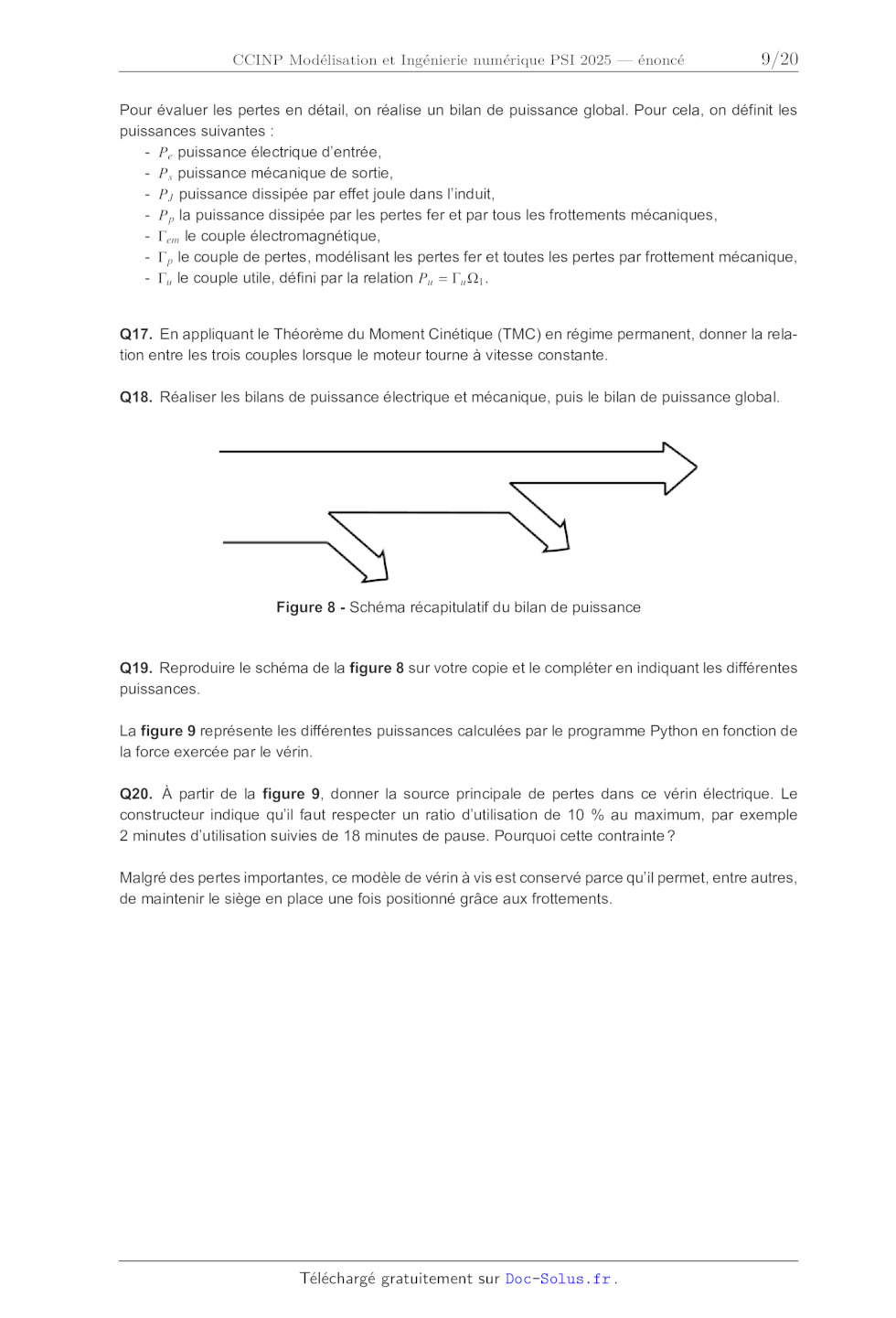
Q18. Réaliser les bilans de puissance électrique et mécanique, puis le bilan de
puissance global.
Figure 8 - Schéma récapitulatif du bilan de puissance
Q19. Reproduire le schéma de la figure 8 sur votre copie et le compléter en
indiquant les différentes
puissances.
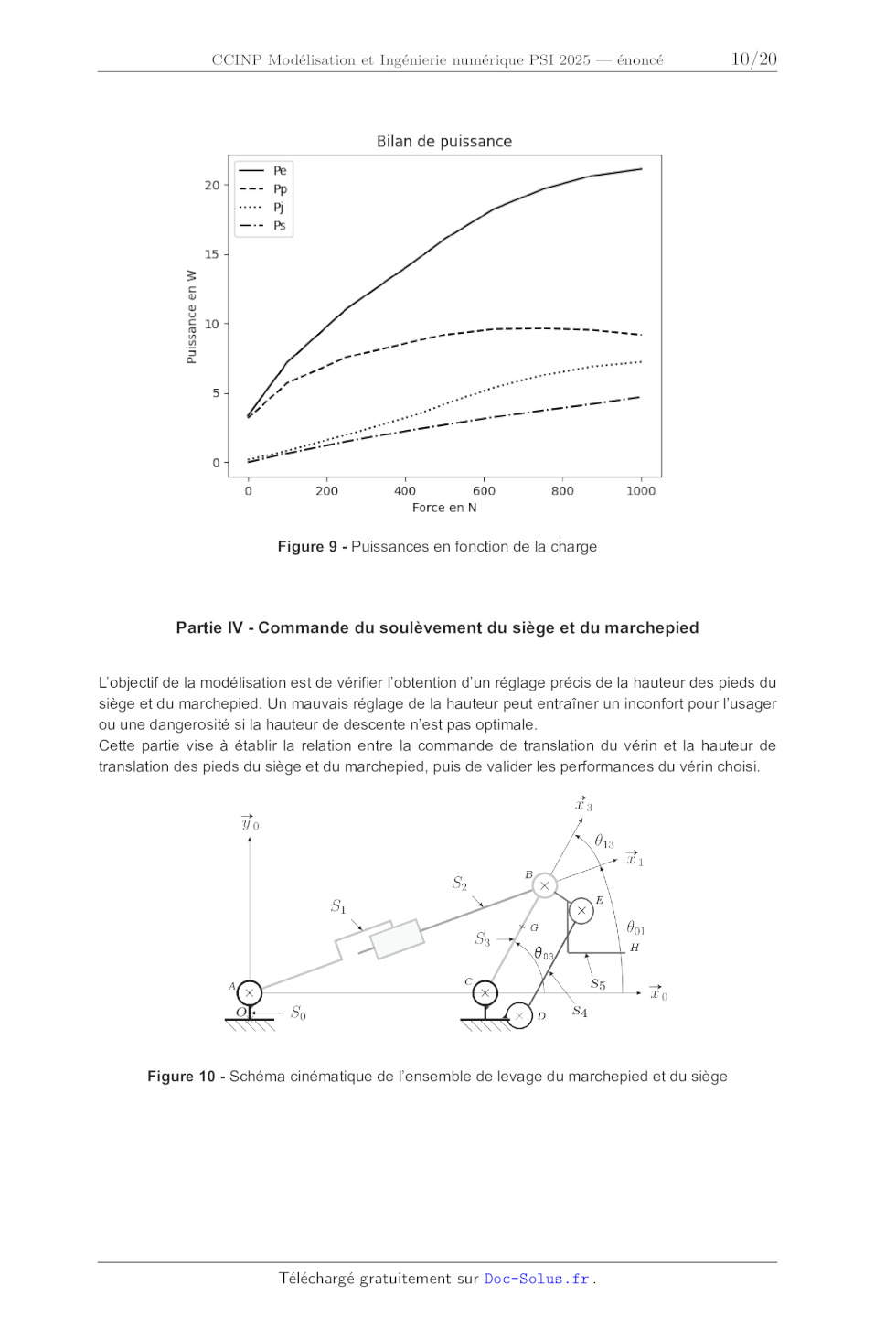
La figure 9 représente les différentes puissances calculées par le programme
Python en fonction de
la force exercée par le vérin.
Q20. À partir de la figure 9, donner la source principale de pertes dans ce
vérin électrique. Le
constructeur indique qu'il faut respecter un ratio d'utilisation de 10 % au
maximum, par exemple
2 minutes d'utilisation suivies de 18 minutes de pause. Pourquoi cette
contrainte ?
Malgré des pertes importantes, ce modèle de vérin à vis est conservé parce
qu'il permet, entre autres,
de maintenir le siège en place une fois positionné grâce aux frottements.
9/20
Figure 9 - Puissances en fonction de la charge
Partie IV - Commande du soulèvement du siège et du marchepied
L'objectif de la modélisation est de vérifier l'obtention d'un réglage précis
de la hauteur des pieds du
siège et du marchepied. Un mauvais réglage de la hauteur peut entraîner un
inconfort pour l'usager
ou une dangerosité si la hauteur de descente n'est pas optimale.
Cette partie vise à établir la relation entre la commande de translation du
vérin et la hauteur de
translation des pieds du siège et du marchepied, puis de valider les
performances du vérin choisi.
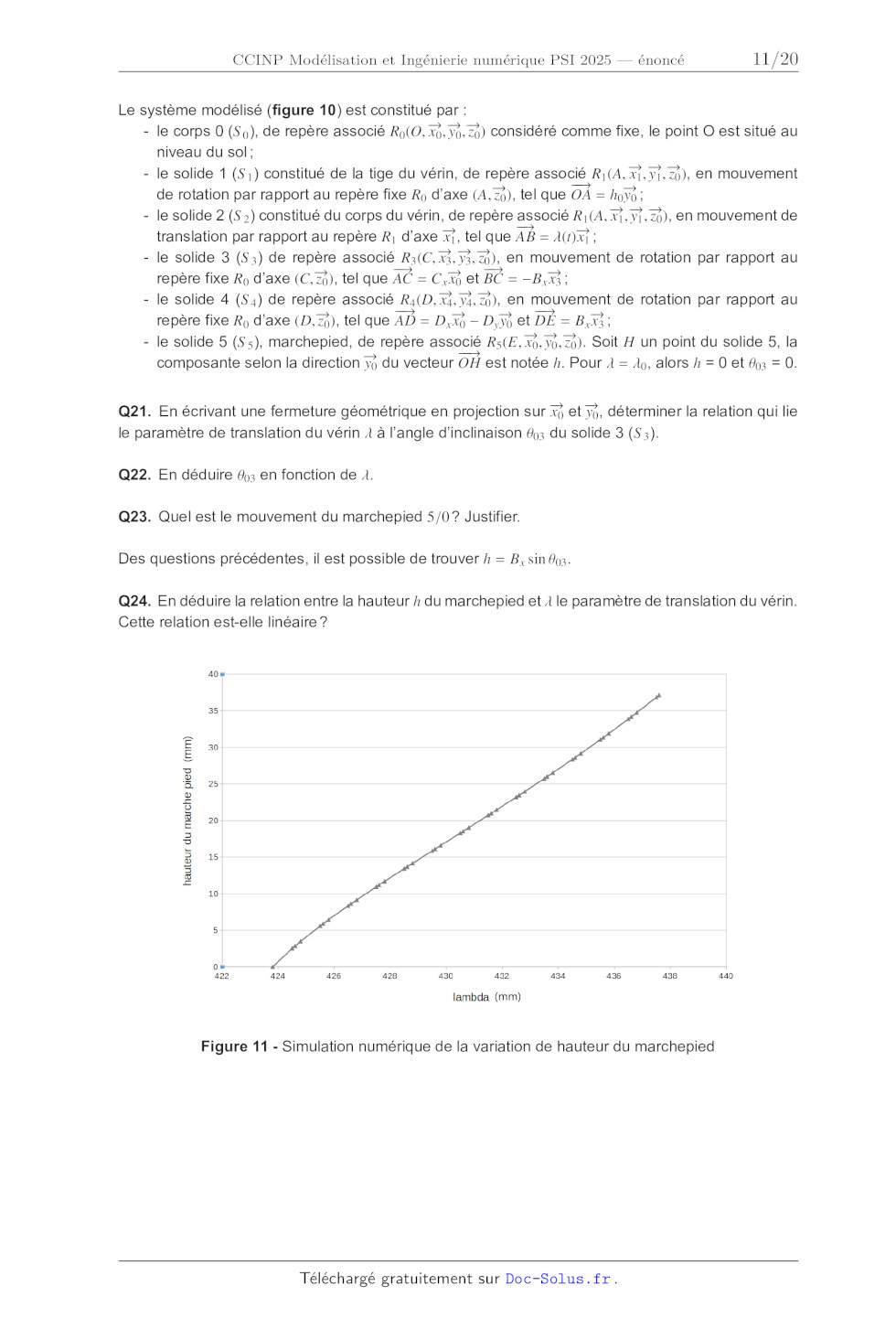
Figure 10 - Schéma cinématique de l'ensemble de levage du marchepied et du siège
10/20
Le système modélisé (figure 10) est constitué par :
-
-
-
- le corps 0 (S 0 ), de repère associé R0 (O,
x0 ,
y0 ,
z0 ) considéré comme fixe, le point O est situé au
niveau du sol
-
-
-
- le solide 1 (S 1 ) constitué de la tige du vérin, de repère associé R1 (A,
x1 ,
y1 ,
z0 ), en mouvement
--
-
-
de rotation par rapport au repère fixe R0 d'axe (A, z0 ), tel que OA = h0 y0
-
-
-
- le solide 2 (S 2 ) constitué du corps du vérin, de repère associé R1 (A,
x1 ,
y1 ,
z0 ), en mouvement de
-
-
-
-
translation par rapport au repère R1 d'axe x1 , tel que AB = (t) x1
-
-
-
- le solide 3 (S 3 ) de repère associé R3 (C,
x3 ,
y3 ,
z0 ), en mouvement de rotation par rapport au
--
--
-
-
-
repère fixe R0 d'axe (C, z0 ), tel que AC = C x x0 et BC = -Bx
x3
-
-
-
- le solide 4 (S 4 ) de repère associé R4 (D, x4 , y4 , z0 ), en mouvement de
rotation par rapport au
--
--
-
-
-
-
repère fixe R0 d'axe (D,
x0 - Dy
y0 et DE = Bx
x3
z0 ), tel que AD = D x
-
-
-
- le solide 5 (S 5 ), marchepied, de repère associé R5 (E, x0 , y0 , z0 ). Soit
H un point du solide 5, la
--
-
composante selon la direction
y0 du vecteur OH est notée h. Pour = 0 , alors h = 0 et 03 = 0.
-
-
Q21. En écrivant une fermeture géométrique en projection sur
x0 et
y0 , déterminer la relation qui lie
le paramètre de translation du vérin à l'angle d'inclinaison 03 du solide 3 (S
3 ).
Q22. En déduire 03 en fonction de .
Q23. Quel est le mouvement du marchepied 5/0 ? Justifier.
Des questions précédentes, il est possible de trouver h = Bx sin 03 .
Q24. En déduire la relation entre la hauteur h du marchepied et le paramètre
de translation du vérin.
Cette relation est-elle linéaire ?
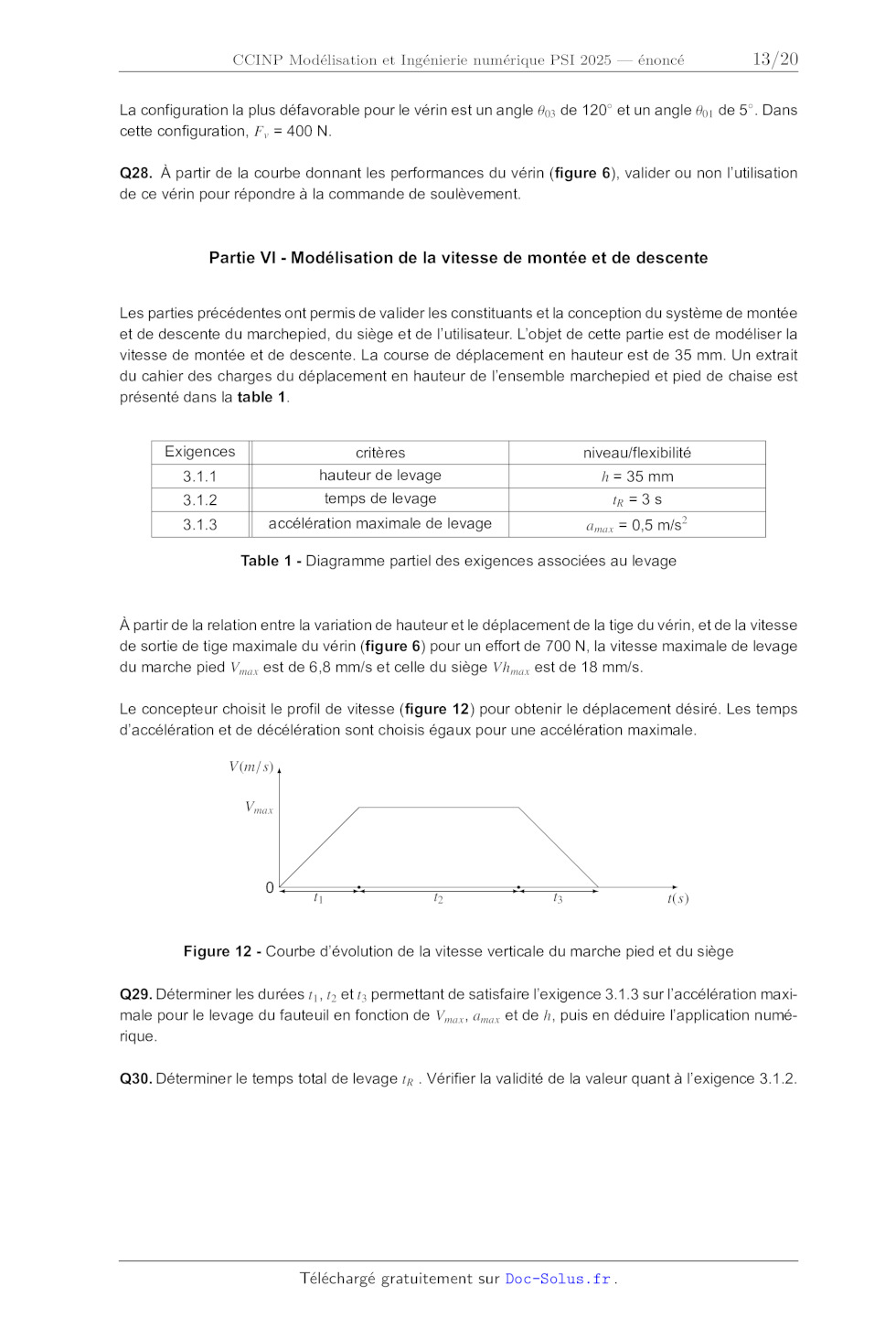
Figure 11 - Simulation numérique de la variation de hauteur du marchepied
11/20
Q25. Dans la pratique, la longueur du vérin varie entre 424 mm et 437,5 mm. À
partir de la simulation
extraite du modèle numérique du système (figure 11), sur quelle plage de
valeurs de (t) peut-on
linéariser ? Donner le coefficient de linéarité.
Partie V - Validation des performances du vérin
Une modélisation cinématique du système a été réalisée dans la partie
précédente. L'objet de cette
partie est de valider les performances du vérin pour en permettre la commande.
L'étude sera d'abord
réalisée par une modélisation statique. La modélisation retenue pour le système
est représentée sur
la figure 10.
Le mécanisme est constitué d'un assemblage de solides indéformables (la
géométrie des pièces
peut être considérée comme invariante). La modélisation statique reprend le
schéma cinématique
pour modéliser le système. Il s'agit cette fois de modéliser les actions
mécaniques transmissibles.
Pour les calculs de pré-dimensionnement, l'ensemble S est constitué du solide S
3 , du solide S 4 , du
marche pied S 5 , des pieds et de la personne à soulever. Le centre de gravité
de cet ensemble est
noté G. Avec ces hypothèses, les actions de 5 3 et de 0 4 n'interviendront
pas dans le calcul.
Données :
- l'action de la pesanteur agissant sur l'ensemble S est modélisée par un
glisseur en G, tel que :
0
0
{
}
;
-M
g
0
T pesS =
tot
0
0 (
-
-
-
x ,
y ,
z )
G
0
0 0
-- 2 --
- Mtot = 100 kg et CG = CB
3
- l'action du vérin agissant sur le solide S 3 est modélisée par un glisseur en
B tel que :
0
F
v
{
}
;
0
0
Tverin3 =
0 0
-
-
(-
x1 ,
y1 ,
z1 )
B
-
-
--
-
-
- AC = C x et BC = -B x avec C = 450 mm et B = 40 mm
x 0
x 3
x
x
- 13 = 03 - 01
- pour le guidage du solide S 3 par rapport au corps S 0 , l'ensemble est
modélisé par une liaison
-
-
pivot d'axe (C,
z0 ), bloquant tous les mouvements hormis la rotation selon la direction
z0 . Cette
liaison est supposée sans frottement.
Q26. Établir le graphe des liaisons de l'ensemble du système, en déduire le
degré d'hyperstatisme
dans une hypothèse de problème plan. Conclure sur la résolution du problème.
Q27. Isoler S, écrire le théorème du moment statique en C et en déduire
l'action du vérin Fv en fonction de Mtot et des données du problème.
12/20
La configuration la plus défavorable pour le vérin est un angle 03 de 120 et un
angle 01 de 5 . Dans
cette configuration, Fv = 400 N.
Q28. À partir de la courbe donnant les performances du vérin (figure 6),
valider ou non l'utilisation
de ce vérin pour répondre à la commande de soulèvement.
Partie VI - Modélisation de la vitesse de montée et de descente
Les parties précédentes ont permis de valider les constituants et la conception
du système de montée
et de descente du marchepied, du siège et de l'utilisateur. L'objet de cette
partie est de modéliser la
vitesse de montée et de descente. La course de déplacement en hauteur est de 35
mm. Un extrait
du cahier des charges du déplacement en hauteur de l'ensemble marchepied et
pied de chaise est
présenté dans la table 1.
Exigences
3.1.1
critères
hauteur de levage
3.1.2
temps de levage
h = 35 mm
tR = 3 s
3.1.3
accélération maximale de levage
amax = 0,5 m/s2
niveau/flexibilité
Table 1 - Diagramme partiel des exigences associées au levage
À partir de la relation entre la variation de hauteur et le déplacement de la
tige du vérin, et de la vitesse
de sortie de tige maximale du vérin (figure 6) pour un effort de 700 N, la
vitesse maximale de levage
du marche pied Vmax est de 6,8 mm/s et celle du siège Vhmax est de 18 mm/s.
Le concepteur choisit le profil de vitesse (figure 12) pour obtenir le
déplacement désiré. Les temps
d'accélération et de décélération sont choisis égaux pour une accélération
maximale.
V(m/s)
Vmax
0
t1
t2
t3
t(s)
Figure 12 - Courbe d'évolution de la vitesse verticale du marche pied et du
siège
Q29. Déterminer les durées t1 , t2 et t3 permettant de satisfaire l'exigence
3.1.3 sur l'accélération maximale pour le levage du fauteuil en fonction de
Vmax , amax et de h, puis en déduire l'application numérique.
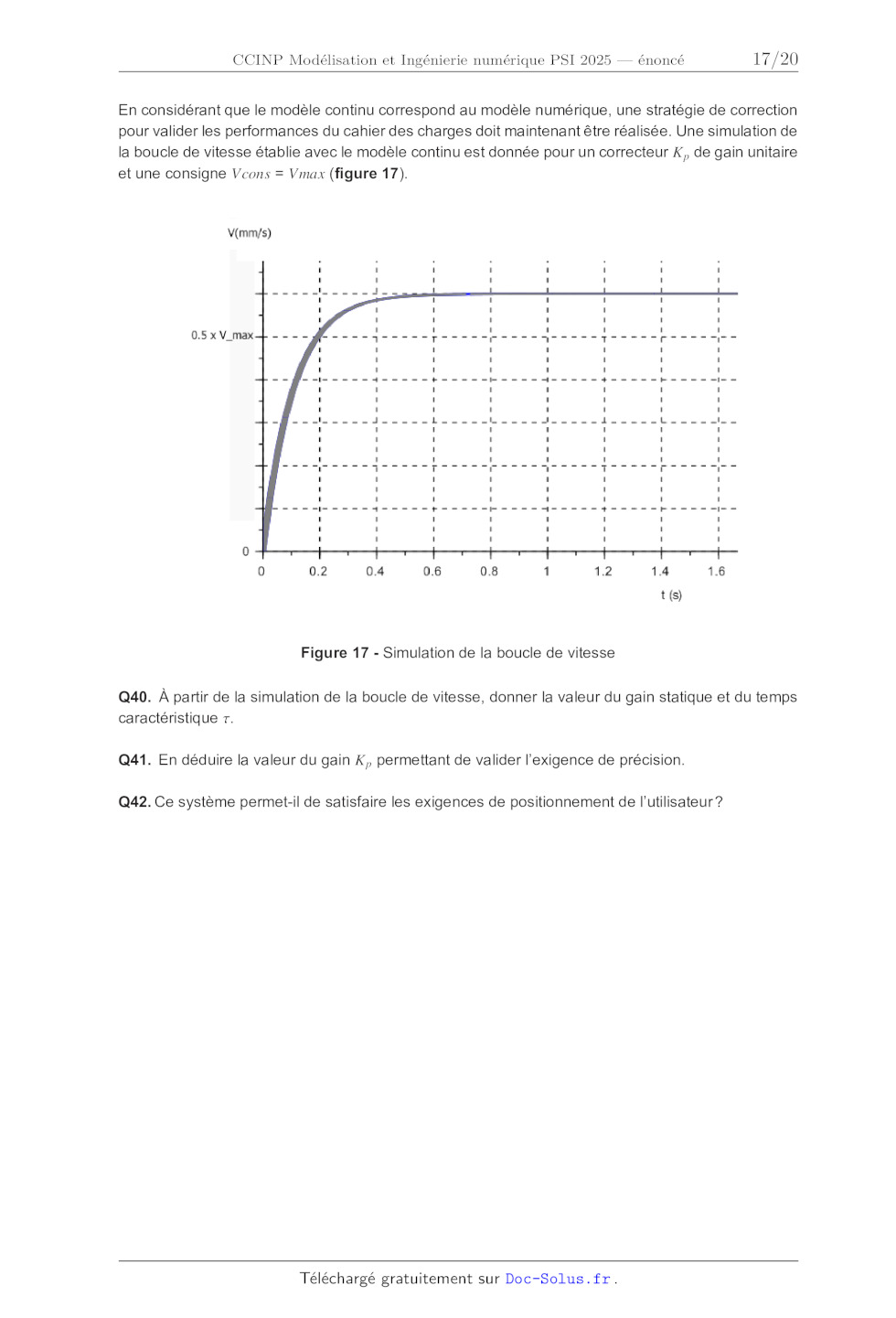
Q30. Déterminer le temps total de levage tR . Vérifier la validité de la valeur
quant à l'exigence 3.1.2.
13/20
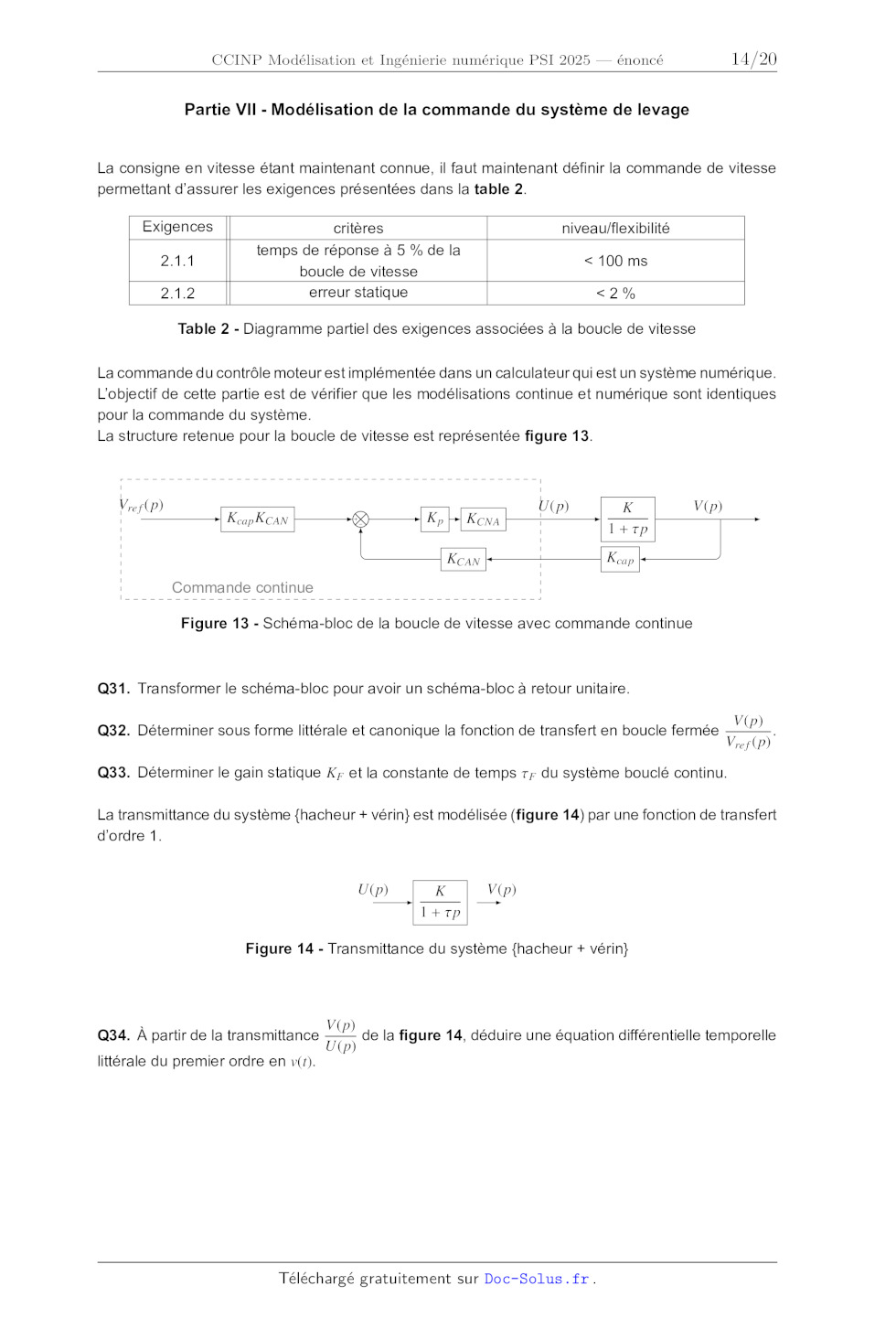
Partie VII - Modélisation de la commande du système de levage
La consigne en vitesse étant maintenant connue, il faut maintenant définir la
commande de vitesse
permettant d'assurer les exigences présentées dans la table 2.
Exigences
2.1.1
2.1.2
critères
temps de réponse à 5 % de la
boucle de vitesse
erreur statique
niveau/flexibilité
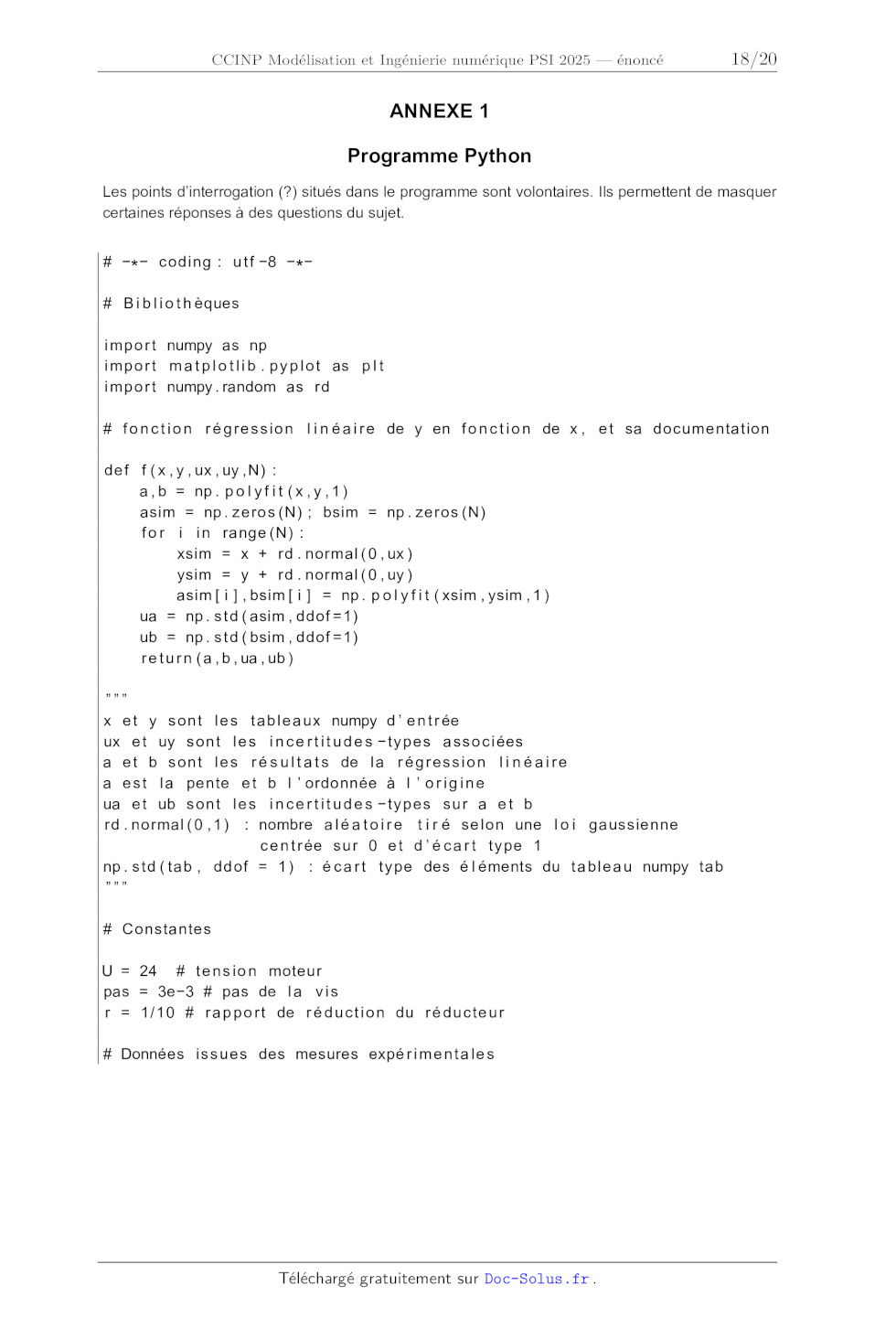
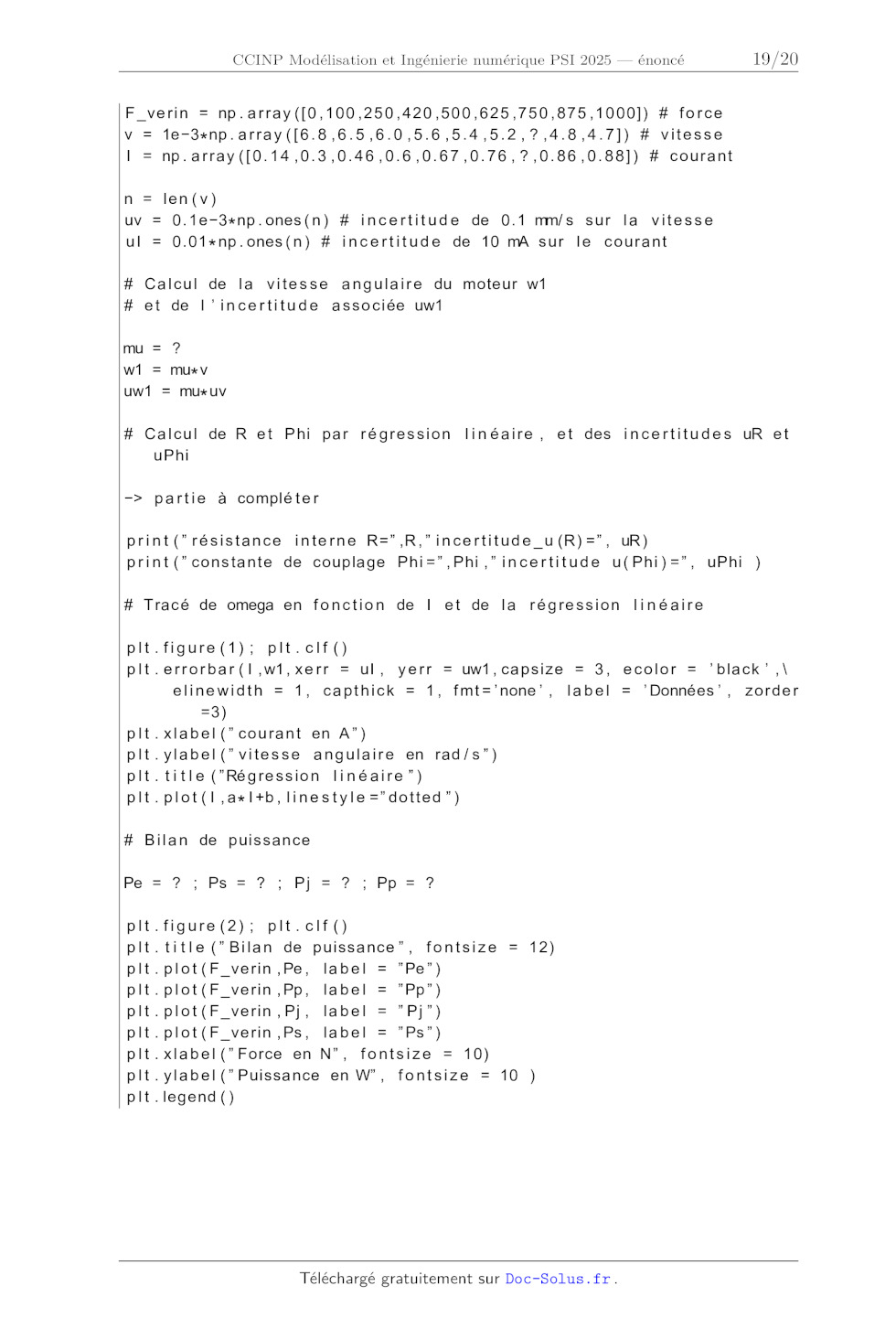
< 100 ms <2% Table 2 - Diagramme partiel des exigences associées à la boucle de vitesse La commande du contrôle moteur est implémentée dans un calculateur qui est un système numérique. L'objectif de cette partie est de vérifier que les modélisations continue et numérique sont identiques pour la commande du système. La structure retenue pour la boucle de vitesse est représentée figure 13. Vre f (p) Kcap KCAN + - Kp KCNA U(p) K 1 + p V(p) Kcap KCAN Commande continue Figure 13 - Schéma-bloc de la boucle de vitesse avec commande continue Q31. Transformer le schéma-bloc pour avoir un schéma-bloc à retour unitaire. Q32. Déterminer sous forme littérale et canonique la fonction de transfert en boucle fermée V(p) . Vre f (p) Q33. Déterminer le gain statique KF et la constante de temps F du système bouclé continu. La transmittance du système {hacheur + vérin} est modélisée (figure 14) par une fonction de transfert d'ordre 1. U(p) K 1 + p V(p) Figure 14 - Transmittance du système {hacheur + vérin} Q34. À partir de la transmittance littérale du premier ordre en v(t). V(p) de la figure 14, déduire une équation différentielle temporelle U(p) 14/20 Les différents signaux intervenant dans une commande numérique d'un processus continu sont définis sur la figure 15. va (t) vq (t) ve [k] t 0 t 0 Analogique Échantillonné t 0 Échantillonné avec bloqueur (BOZ) Figure 15 - Différents types de signaux L'échantillonnage de v(t) fournit la valeur v(kT e ) à la commande numérique à chaque instant d'échantillonnage. À chaque pas d'échantillonnage, le Bloqueur d'Ordre Zéro (BOZ) maintient la valeur de la tension u(kT e ) du kième échantillon sur une durée correspondant à la période d'échantillonnage T e . Pour la suite, on adopte les notations suivantes : - T e la période d'échantillonnage - v(kT e ) = vk la valeur de la vitesse dans le vérin à l'instant kT e , correspondant à la valeur au kième échantillon - v((k + 1)T e ) la valeur de la vitesse dans le vérin à l'instant (k + 1)T e , correspondant à la valeur au (k + 1)ième échantillon - u(kT e ) = uk la valeur de l'excitation à l'instant kT e . Cette valeur est constante pendant toute la période d'échantillonnage grâce au BOZ. t t Q35. La solution de l'équation différentielle est v(t) = Kuk (1 - e- ) + Vk e- . Écrire les équations obtenues pour t = (k + 1)T e et pour l'instant initial kT e . En déduire l'équation de récurrence en boucle ouverte sous la forme v((k + 1)T e ) + Av(kT e ) = Bu(kT e ) A et B seront explicitées en fonction de K et de . vre f (kT e ) Kcap KCAN + - Kp KCNA KCAN u(kT e ) équation récurrence Kcap v(kT e ) Kcap Carte de commande numérique Figure 16 - Schéma-bloc de la boucle de vitesse avec commande numérique 15/20 v(kT e ) Pour la suite et quelle que soit la valeur déterminée précédemment, la valeur de A sera choisie égale Te Te à -e- et celle de B à K(1 - e- ). Q36. À partir du schéma-bloc de la figure 16, montrer que l'équation de récurrence peut se mettre sous forme littérale du système en boucle fermée : v((k + 1)T e ) + A f v(kT e ) = B f vre f (kT e ) avec A f = A + BK p Kcna Kcap Kcan et B f = BK p Kcna Kcap Kcan Hypothèses : - à l'instant initial, v(kT e = 0) = v0 - un échelon d'excitation vre f (kT e ) = vcons u(kT e ) avec u(kT e ) échelon unitaire numérique - la solution k 0 à une excitation en échelon de cette équation de récurrence est la somme : · du régime transitoire de la forme K(-A f )k avec K une constante qui dépend de la condition initiale · du régime permanent pour k obtenu, sous réserve de convergence, à partir de l'équation de récurrence v((k + 1)T e ) = v(kT e ). Q37. Déterminer la solution de cette équation de récurrence à partir de l'état initial et de l'échelon d'amplitude de vitesse désirée. Le résultat sera donné, en fonction de k, v0 , A f , B f et de vcons , sous la forme v(kT e ) = régime transitoire + régime permanent. Q38. En analysant le régime transitoire de la solution de l'équation de récurrence, déterminer la condition nécessaire et suffisante permettant d'assurer la convergence donc la stabilité de la réponse en vitesse. Q39. Déterminer le gain statique du système bouclé numérique. La commande du système numérique est-elle identique à celle du modèle continu ? 16/20 En considérant que le modèle continu correspond au modèle numérique, une stratégie de correction pour valider les performances du cahier des charges doit maintenant être réalisée. Une simulation de la boucle de vitesse établie avec le modèle continu est donnée pour un correcteur K p de gain unitaire et une consigne Vcons = Vmax (figure 17). Figure 17 - Simulation de la boucle de vitesse Q40. À partir de la simulation de la boucle de vitesse, donner la valeur du gain statique et du temps caractéristique . Q41. En déduire la valeur du gain K p permettant de valider l'exigence de précision. Q42. Ce système permet-il de satisfaire les exigences de positionnement de l'utilisateur ? 17/20 ANNEXE 1 Programme Python Les points d'interrogation (?) situés dans le programme sont volontaires. Ils permettent de masquer certaines réponses à des questions du sujet. # -* - coding : u t f -8 -* - # B i b l i o t h èques i m p o r t numpy as np i m p o r t m a t p l o t l i b . p y p l o t as p l t i m p o r t numpy . random as r d # f o n c t i o n r é g r e s s i o n l i n é a i r e de y en f o n c t i o n de x , e t sa documentation d e f f ( x , y , ux , uy , N) : a , b = np . p o l y f i t ( x , y , 1 ) asim = np . zeros (N) bsim = np . zeros (N) f o r i i n range (N) : xsim = x + r d . normal ( 0 , ux ) ysim = y + r d . normal ( 0 , uy ) asim [ i ] , bsim [ i ] = np . p o l y f i t ( xsim , ysim , 1 ) ua = np . s t d ( asim , ddof = 1) ub = np . s t d ( bsim , ddof = 1) r e t u r n ( a , b , ua , ub ) """ x e t y s o n t l e s t a b l e a u x numpy d ' e n t r ée ux e t uy s o n t l e s i n c e r t i t u d e s - t y p e s a s s o c i ées a e t b s o n t l e s r é s u l t a t s de l a r é g r e s s i o n l i n é a i r e a e s t l a pente e t b l ' ordonnée à l ' o r i g i n e ua e t ub s o n t l e s i n c e r t i t u d e s - t y p e s s u r a e t b r d . normal ( 0 , 1 ) : nombre a l é a t o i r e t i r é s e l o n une l o i gaussienne c e n t r ée s u r 0 e t d ' é c a r t t y p e 1 np . s t d ( tab , ddof = 1 ) : é c a r t t y p e des é l éments du t a b l e a u numpy t a b """ # Constantes U = 24 # t e n s i o n moteur pas = 3e-3 # pas de l a v i s r = 1/10 # r a p p o r t de r é d u c t i o n du r é d u c t e u r # Données i s s u e s des mesures expé r i m e n t a l e s 18/20 F _ v e r i n = np . a r r a y ( [ 0 , 1 0 0 , 2 5 0 , 4 2 0 , 5 0 0 , 6 2 5 , 7 5 0 , 8 7 5 , 1 0 0 0 ] ) # f o r c e v = 1e-3 * np . a r r a y ( [ 6 . 8 , 6 . 5 , 6 . 0 , 5 . 6 , 5 . 4 , 5 . 2 , ? , 4 . 8 , 4 . 7 ] ) # v i t e s s e I = np . a r r a y ( [ 0 . 1 4 , 0 . 3 , 0 . 4 6 , 0 . 6 , 0 . 6 7 , 0 . 7 6 , ? , 0 . 8 6 , 0 . 8 8 ] ) # c o u r a n t n = len ( v ) uv = 0 . 1 e-3 * np . ones ( n ) # i n c e r t i t u d e de 0 . 1 mm/ s s u r l a v i t e s s e u I = 0.01 * np . ones ( n ) # i n c e r t i t u d e de 10 mA s u r l e c o u r a n t # C a l c u l de l a v i t e s s e a n g u l a i r e du moteur w1 # e t de l ' i n c e r t i t u d e a s s o c i ée uw1 mu = ? w1 = mu* v uw1 = mu* uv # C a l c u l de R e t Phi par r é g r e s s i o n l i n é a i r e , e t des i n c e r t i t u d e s uR e t uPhi -> p a r t i e à complé t e r
p r i n t ( " r é s i s t a n c e i n t e r n e R=" ,R , " i n c e r t i t u d
e _ u (R) =" , uR )
p r i n t ( " c o n s t a n t e de couplage Phi = " , Phi , " i n c e r t i t u
d e u ( Phi ) = " , uPhi )
# Trac é de omega en f o n c t i o n de I e t de l a r é g r e s s i o n l i n
é a i r e
plt . figure (1) plt . c l f ()
p l t . e r r o r b a r ( I , w1 , x e r r = uI , y e r r = uw1 , c a p s i z e
= 3 , e c o l o r = ' black ' , \
e l i n e w i d t h = 1 , c a p t h i c k = 1 , f m t = ' none ' , l a b e l =
' Données ' , z o r d e r
=3)
p l t . x l a b e l ( " c o u r a n t en A " )
p l t . y l a b e l ( " v i t e s s e a n g u l a i r e en rad / s " )
p l t . t i t l e ( " Ré g r e s s i o n l i n é a i r e " )
p l t . p l o t ( I , a * I +b , l i n e s t y l e =" d o t t e d " )
# B i l a n de puissance
Pe = ? Ps = ? P j = ? Pp = ?
plt . figure (2) plt . c l f ()
p l t . t i t l e ( " B i l a n de puissance " , f o n t s i z e = 12)
p l t . p l o t ( F_verin , Pe , l a b e l = " Pe " )
p l t . p l o t ( F_verin , Pp , l a b e l = " Pp " )
p l t . p l o t ( F_verin , Pj , l a b e l = " P j " )
p l t . p l o t ( F_verin , Ps , l a b e l = " Ps " )
p l t . x l a b e l ( " Force en N" , f o n t s i z e = 10)
p l t . y l a b e l ( " Puissance en W" , f o n t s i z e = 10 )
p l t . legend ( )
19/20
ANNEXE 2
Transmission des incertitudes pour un produit ou un quotient
Soient a et b deux grandeurs physiques et u(a) et u(b) les incertitudes-type
associées.
a
On définit p = a b et q = .
b
Les incertitudes sur p et q sont alors données par les expressions :
)2 (
)2
(
u(b)
u(a)
u(p) = p
+
a
b
u(a)
a
)2
(
u(b)
+
b
)2
FIN
20/20
I M P R I M E R I E N A T I O N A L E 25 1057 D'après documents fournis
u(q) = q
(