
CCINP Modélisation et Ingénierie numérique PSI 2022
| Thème de l'épreuve | Modélisation de la prévention des tsunamis |
| Principaux outils utilisés | Mécanique du point, mécanique des fluides, induction |
| Mots clefs | Sismomètre, force de Laplace, fonction de transfert, tsunami, équation de propagation |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- -
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
SESSION 2022 C PSI3MO
CONCOURS
COMMUN
INP
ÉPREUVE SPÉCIFIQUE - FILIÈRE PSI
MODÉLISATION ET INGÉNIERIE NUMÉRIQUE
Durée : 4 heures
N.B. : le candidat attachera la plus grande importance à la clarté, à la
précision et à la concision de la rédaction.
Si un candidat est amené à repérer ce qui peut lui sembler être une erreur
d'énoncé, il le signalera sur sa copie
et devra poursuivre sa composition en expliquant les raisons des initiatives
qu'il a été amené à prendre.
RAPPEL DES CONSIGNES
-__ Utiliser uniquement un Stylo noir ou bleu foncé non effaçable pour la
rédaction de votre composition ; d'autres
couleurs, excepté le vert, peuvent être utilisées, mais exclusivement pour les
schémas et la mise en
évidence des résultats.
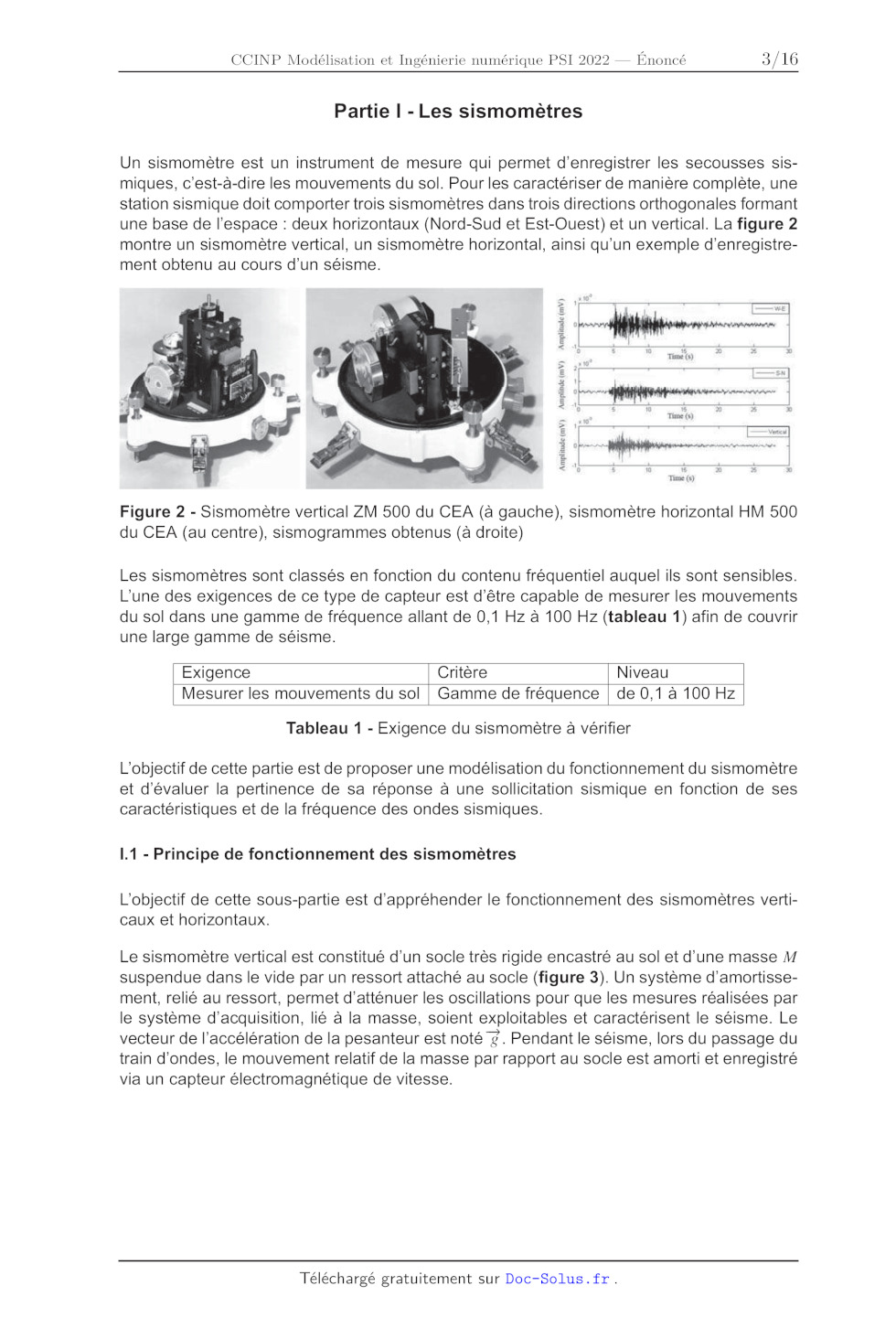
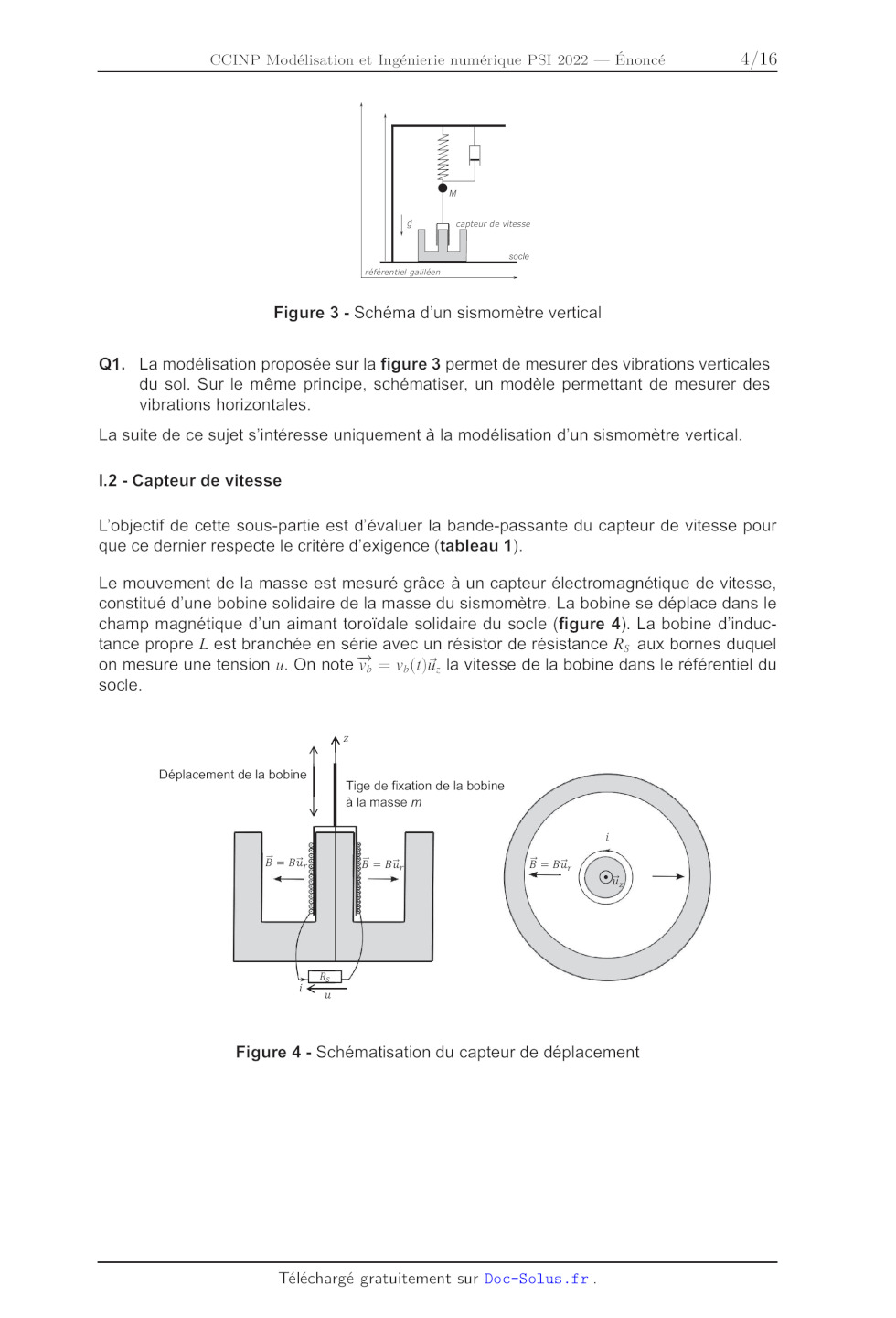
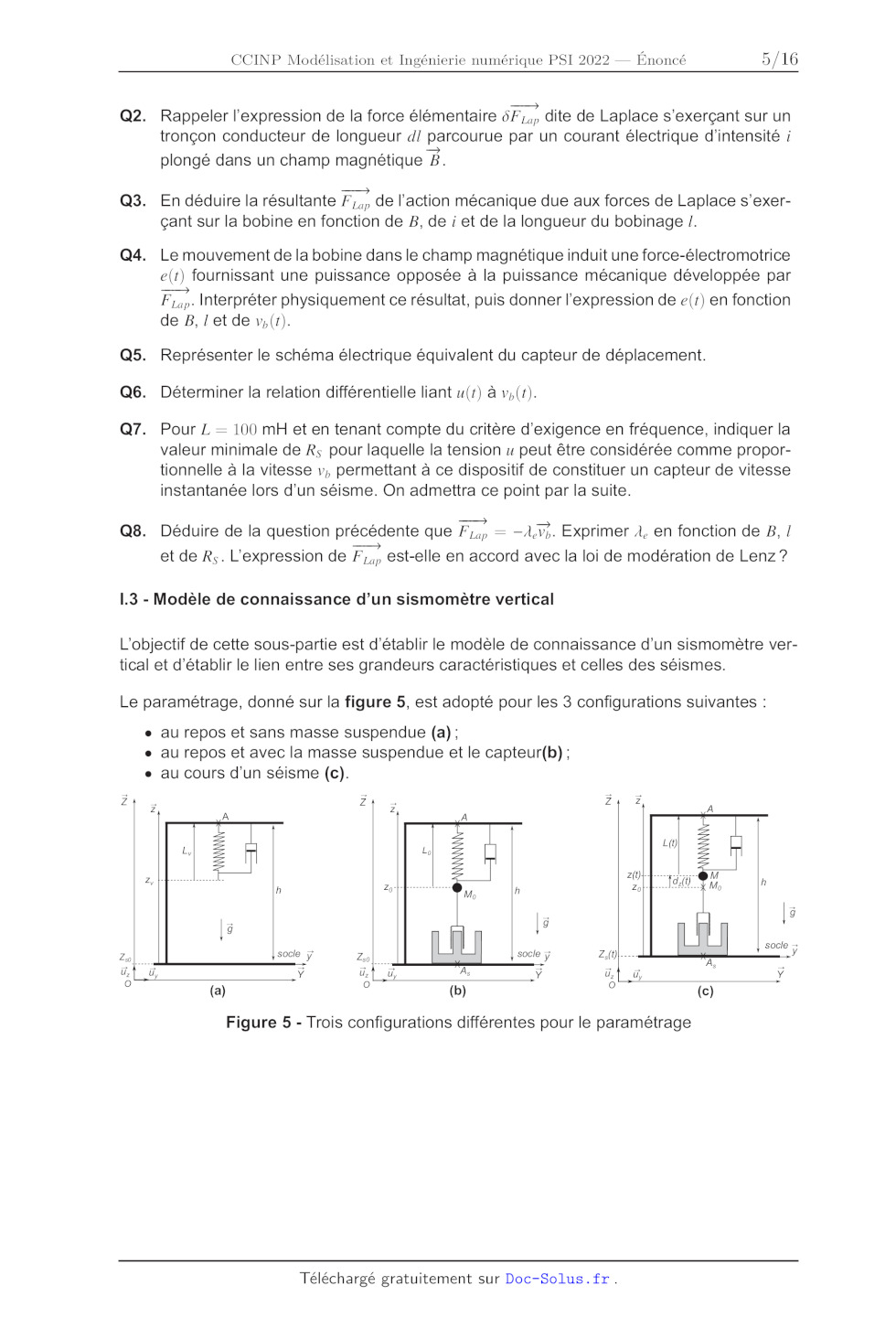
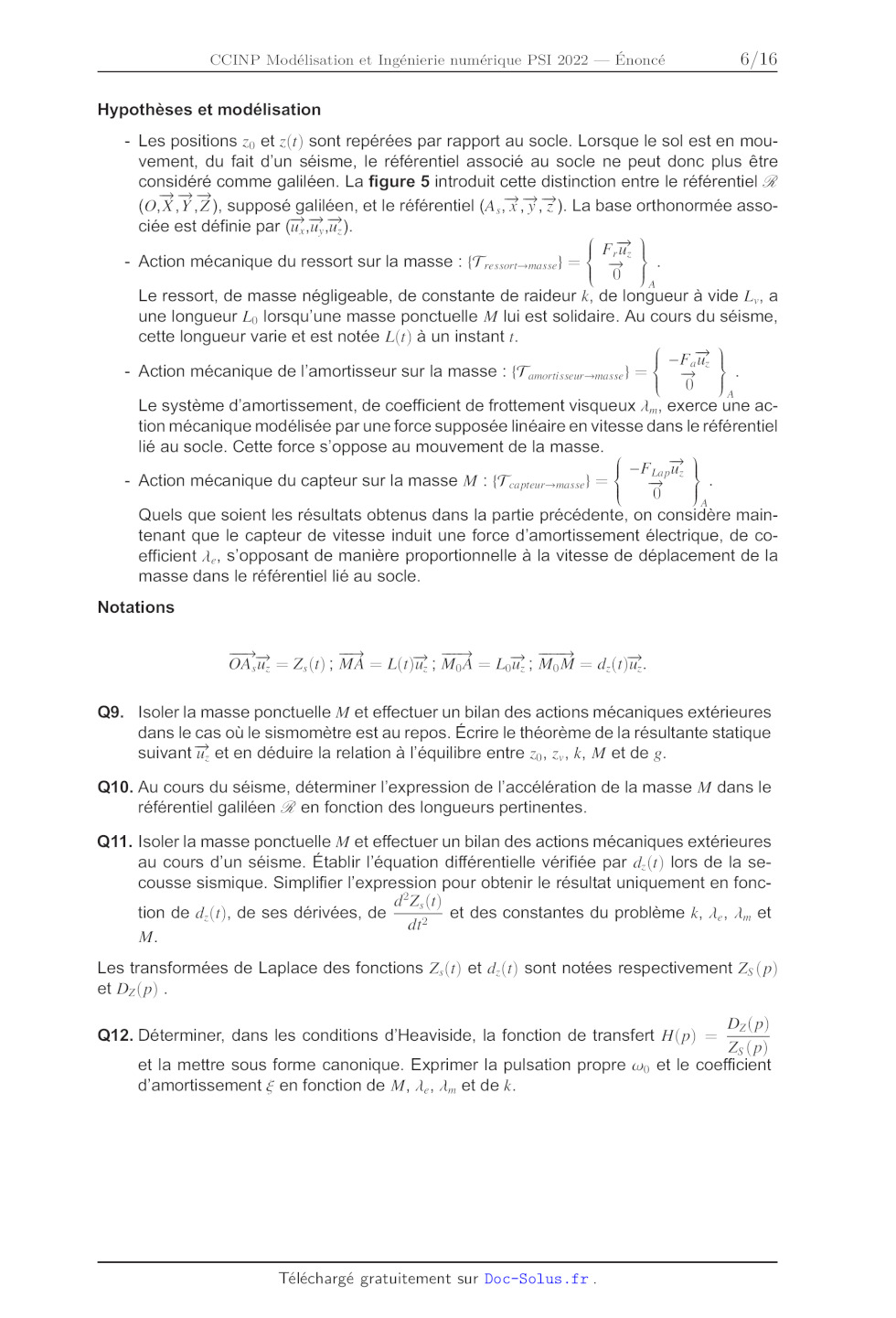
-< Ne pas utiliser de correcteur. -_ Écrire le mot FIN à la fin de votre composition. Les calculatrices sont interdites. Le sujet est composé de trois parties indépendantes. 1/16 Modélisation de la prévention des tsunamis Présentation générale Les tsunamis font partie des catastrophes naturelles les plus destructrices. Provoqués par de brutales perturbations de la couche d'eau de l'océan, les tsunamis sont des phénomènes correspondant à une série de vagues océaniques pouvant atteindre de grandes amplitudes en approchant des côtes. La majorité des tsunamis observés sont générés par des séismes (tremblements de terre) dont le foyer est situé sous l'eau et créant une perturbation verticale de la surface de l'eau. Il peut se passer plusieurs minutes, voire plusieurs heures entre le tremblement de terre et le moment où le tsunami atteint les côtes. Figure 1 - Tsunami créé par une faille sismique Des systèmes d'alerte permettent de prévenir la population dans les zones à risques. Ces systèmes d'alerte sont composés de stations munies de sismomètres et d'un réseau de bouées D.A.R.T. (Deep-ocean Assessment and Reporting of Tsunamis). Les données des sismomètres en réseau permettent de localiser le séisme et les données des bouées per- mettent de surveiller la propagation du tsunami en mer. Ce sujet propose d'aborder la modélisation de trois points clés des systèmes d'alerte des tsunamis : - La partie I modélise la détection d'un séisme par un sismomètre. - La partie Il s'intéresse à la modélisation du principe permettant de localiser un séisme à partir des données des sismomètres. - La partie III propose une modélisation simple de la propagation du tsunami permettant d'estimer son temps de propagation. 2116 Partie I - Les sismomètres Un sismomètre est un instrument de mesure qui permet d'enregistrer les secousses sis- miques, c'est-à-dire les mouvements du sol. Pour les caractériser de manière complète, une station sismique doit comporter trois sismomètres dans trois directions orthogonales formant une base de l'espace : deux horizontaux (Nord-Sud et Est-Ouest) et un vertical. La figure 2 montre un sismomètre vertical, un sismomètre horizontal, ainsi qu'un exemple d'enregistre- ment obtenu au cours d'un séisme. Amplitude (mV } 1: free 1 } c 10 4 x u Titre (5) x] Amplinde (mV) + ' 1r 2 ann 1. Le À | nr 1 l ; 10 ' À » Time (5) i | 'er ru f ë to 1e 0 2 Tune (s} Amplitude tm) Figure 2 - Sismomètre vertical ZM 500 du CEA (à gauche), sismomètre horizontal HM 500 du CEA (au centre), sismogrammes obtenus (à droite) Les sismomètres sont classés en fonction du contenu fréquentiel auquel ils sont sensibles. L'une des exigences de ce type de capteur est d'être capable de mesurer les mouvements du sol dans une gamme de fréquence allant de 0,1 Hz à 100 Hz (tableau 1) afin de couvrir une large gamme de séisme. Exigence Critère Niveau Mesurer les mouvements du sol | Gamme de fréquence | de 0,1 à 100 Hz Tableau 1 - Exigence du sismomètre à vérifier L'objectif de cette partie est de proposer une modélisation du fonctionnement du sismomètre et d'évaluer la pertinence de sa réponse à une sollicitation sismique en fonction de ses caractéristiques et de la fréquence des ondes sismiques. 1.1 - Principe de fonctionnement des sismomètres L'objectif de cette sous-partie est d'appréhender le fonctionnement des sismomètres verti- caux et horizontaux. Le sismomètre vertical est constitué d'un socle très rigide encastré au sol et d'une masse M suspendue dans le vide par un ressort attaché au socle (figure 3). Un système d'amortisse- ment, relié au ressort, permet d'atténuer les oscillations pour que les mesures réalisées par le système d'acquisition, lié à la masse, soient exploitables et caractérisent le séisme. Le vecteur de l'accélération de la pesanteur est noté £. Pendant le séisme, lors du passage du train d'ondes, le mouvement relatif de la masse par rapport au socle est amorti et enregistré via un capteur électromagnétique de vitesse. 3/16 capteur de vitesse socle référentiel galiléen Figure 3 - Schéma d'un sismomètre vertical Q1. La modélisation proposée sur la figure 3 permet de mesurer des vibrations verticales du sol. Sur le même principe, schématiser, un modèle permettant de mesurer des vibrations horizontales. La suite de ce sujet s'intéresse uniquement à la modélisation d'un sismomètre vertical. 1.2 - Capteur de vitesse L'objectif de cette sous-partie est d'évaluer la bande-passante du capteur de vitesse pour que ce dernier respecte le critère d'exigence (tableau 1). Le mouvement de la masse est mesuré grâce à un capteur électromagnétique de vitesse, constitué d'une bobine solidaire de la masse du sismomètre. La bobine se déplace dans le champ magnétique d'un aimant toroïdale solidaire du socle (figure 4). La bobine d'induc- tance propre L est branchée en série avec un résistor de résistance Rç aux bornes duquel on mesure une tension #. On note v, = v,(r)ü, la vitesse de la bobine dans le référentiel du socle. Déplacement de la bobine | Tige de fixation de la bobine à la masse m Figure 4 - Schématisation du capteur de déplacement 4116 Q2. QS. Q4. QS. Q6. Q7. Q8. Rappeler l'expression de la force élémentaire 6F,,, dite de Laplace s'exerçant sur un tronçon conducteur de longueur dl! parcourue par un courant électrique d'intensité : plongé dans un champ magnétique B. En déduire la résultante F,,, de l'action mécanique due aux forces de Laplace s'exer- çant sur la bobine en fonction de B, de i et de la longueur du bobinage !. Le mouvement de la bobine dans le champ magnétique induit une force-électromotrice e(t) fournissant une puissance opposée à la puissance mécanique développée par Fan. Mterpréter physiquement ce résultat, puis donner l'expression de e(r) en fonction de B, let de v,(r). Représenter le schéma électrique équivalent du capteur de déplacement. Déterminer la relation différentielle liant u(r) à v,(r). Pour L -- 100 mH et en tenant compte du critère d'exigence en fréquence, indiquer la valeur minimale de À; pour laquelle la tension x peut être considérée comme propor- tionnelle à la vitesse v, permettant à ce dispositif de constituer un capteur de vitesse instantanée lors d'un séisme. On admettra ce point par la suite. Déduire de la question précédente que F,,, -- --A,v;. Exprimer 1, en fonction de B, 1 et de R;. L'expression de F,,, est-elle en accord avec la loi de modération de Lenz? 1.3 - Modèle de connaissance d'un sismomètre vertical L'objectif de cette sous-partie est d'établir le modèle de connaissance d'un sismomètre ver- tical et d'établir le lien entre ses grandeurs caractéristiques et celles des séismes. Le paramétrage, donné sur la figure 5, est adopté pour les 3 configurations suivantes : Z au repos et sans masse suspendue (a); au repos et avec la masse suspendue et le capteur(b) ; au cours d'un séisme (c). L, l N! NI NI z(t).-- h Zo- h zo!- _ E | |< socle = socle ÿ Zo socle ÿ Z(t)|---- ÿ ü, Y ë. | ü, Y ü,| où, Y > o--
(a) (c)
Figure 5 - Trois configurations différentes pour le paramétrage
9/16
Hypothèses et modélisation
Les positions z, et z(r) sont repérées par rapport au socle. Lorsque le sol est
en mour-
vement, du fait d'un séisme, le référentiel associé au socle ne peut donc plus
être
considéré comme galiléen. La figure 5 introduit cette distinction entre le
référentiel 7
= = -- ner PR ,
(O,X,Y,2), supposé galiléen, et le référentiel (A,, *,y,2). La base orthonormée
asso-
ciée est définie par (u,,u,,u:).
Action mécanique du ressort sur la masse : {T ssort-masse) = $
Le ressort, de masse négligeable, de constante de raideur k, de longueur a vide
Z,,a
une longueur Z, lorsqu'une masse ponctuelle M lui est solidaire. Au cours du
séisme,
cette longueur varie et est notée L(r) à un instant r.
| . | Fou
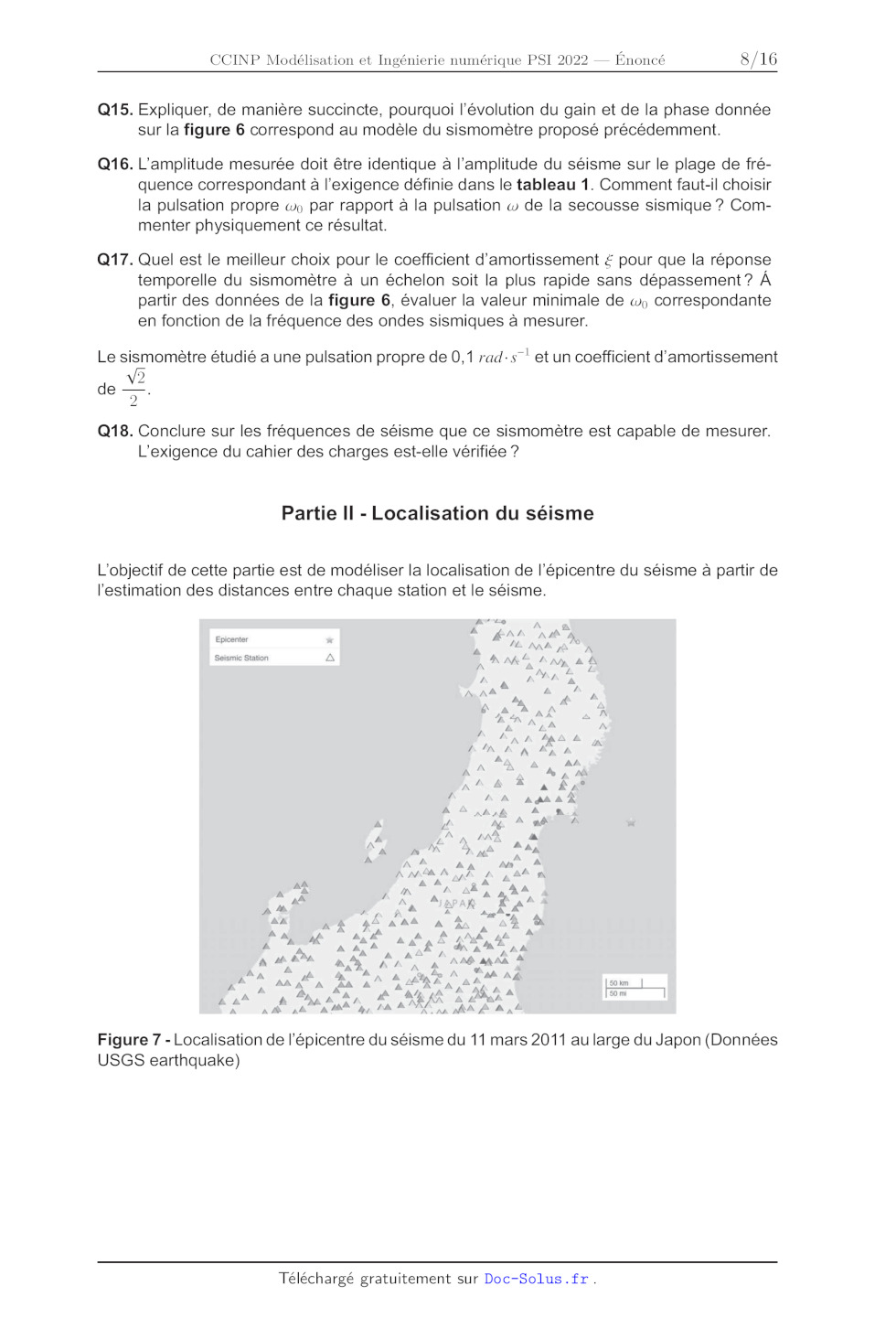
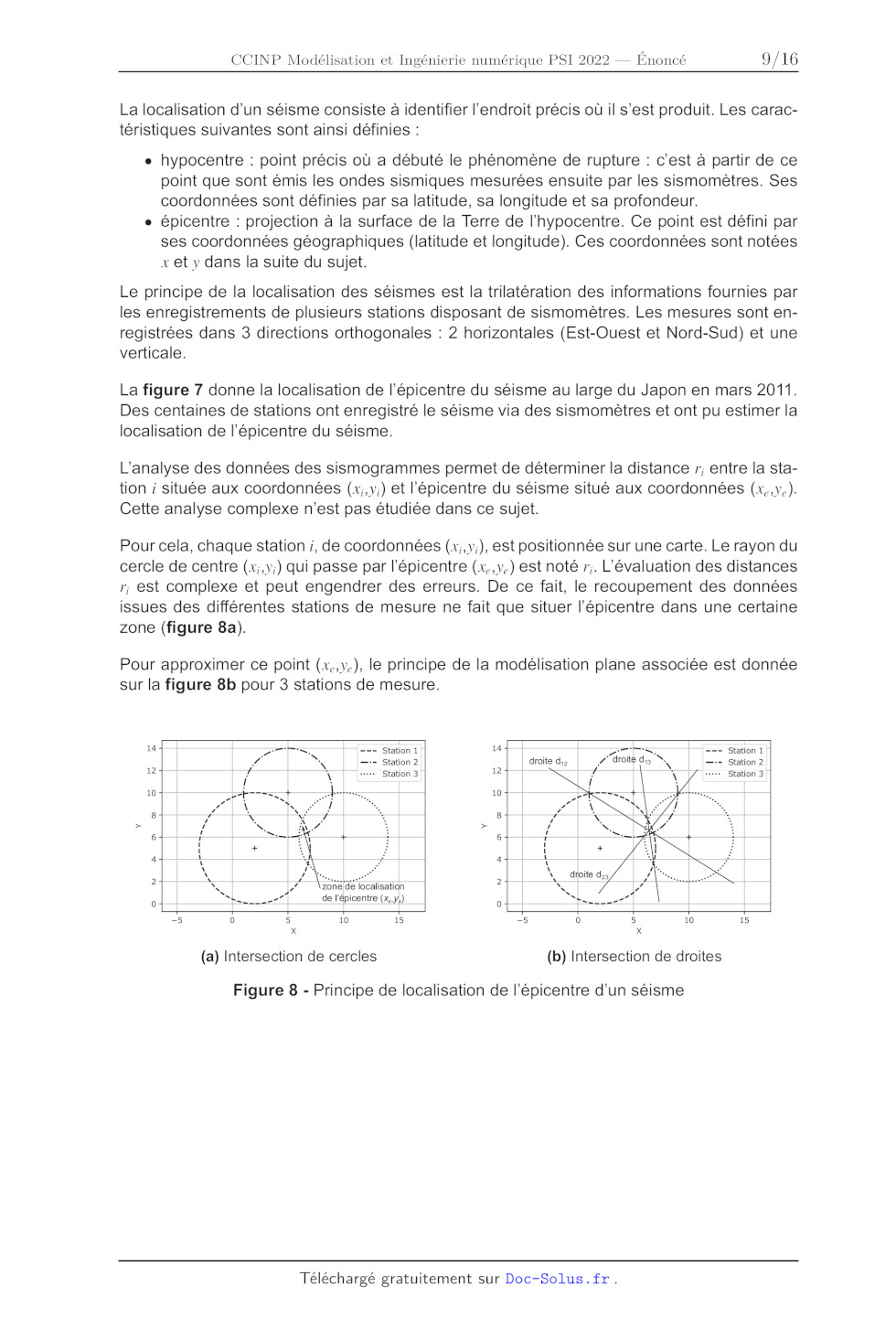
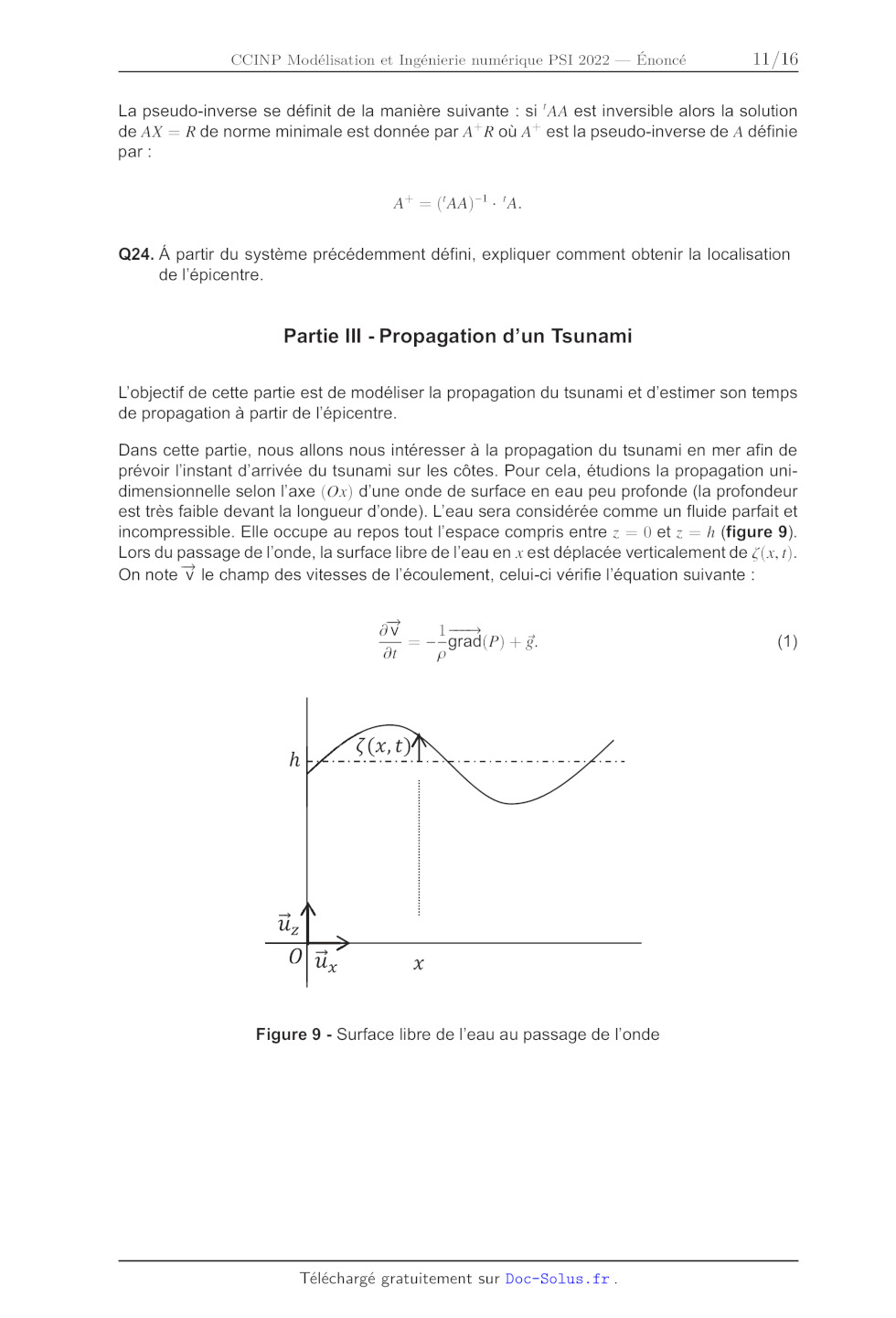
Action mécanique de l'amortisseur sur la masse : {Tnortisseur->masse} -- < Le système d'amortissement, de coefficient de frottement visqueux 1,,, exerce une ac- tion mécanique modélisée par une force supposée linéaire en vitesse dans le référentiel lié au socle. Cette force s'oppose au mouvement de la masse. --F rap Ex 0 A Quels que soient les résultats obtenus dans la partie précédente, on considère main- tenant que le capteur de vitesse induit une force d'amortissement électrique, de co- efficient 1, S'opposant de manière proportionnelle à la vitesse de déplacement de la masse dans le référentiel lié au socle. Action mécanique du capteur sur la masse M : {T pieur-masse} = Notations OA = Z,(t) : MÀ = L(® : MoÀ = Loi: MoM = d. (1m. Q9. Isoler la masse ponctuelle M et effectuer un bilan des actions mécaniques extérieures Q10. Q11. dans le cas où le sismomètre est au repos. Écrire le théorème de la résultante statique suivant % et en déduire la relation à l'équilibre entre zo, z,, k, M et de £. Au cours du séisme, déterminer l'expression de l'accélération de la masse M dans le référentiel galiléen Z en fonction des longueurs pertinentes. Isoler la masse ponctuelle M et effectuer un bilan des actions mécaniques extérieures au cours d'un séisme. Etablir l'équation différentielle vérifiée par d,(r) lors de la se- cousse sismique. Simplifier l'expression pour obtenir le résultat uniquement en fonc- d°Z,(t) TE et des constantes du problème k, 1,, 1, et tion de d,(r), de ses dérivées, de M. Les transformées de Laplace des fonctions Z,(r) et d,(r) sont notées respectivement Z;(p) et D;(p) . Q12. D;(p) Zs(p) et la mettre sous forme canonique. Exprimer la pulsation propre &, et le coefficient d'amortissement £ en fonction de M, À,, 1, et de k. Déterminer, dans les conditions d'Heaviside, la fonction de transfert H(p) -- 6/16 Quels que soient les résultats obtenus précédemment, on considère la fonction de transfert : _P" H(p) = D;(p) _ Of | s(p) 1+ Æ p° Oo Of Au cours des séismes entraïnant des tsunamis, le sol est soumis à une vibration verticale dépendante du temps. Le séisme présente une excitation du sol sinusoïdale de la forme : Z;s(t) = Z; CoS(wt) avec Z, l'amplitude des déplacements du sol et w la pulsation des oscillations. Q13. Déterminer le module et l'argument de la fonction de transfert harmonique H{jw). . , .. Distinguer les résultats en fonction de la valeur du ratio --. 6 Q14. En régime permanent, la réponse du sismomètre est une fonction de forme similaire à l'excitation induite par le séisme. Donner la forme de la réponse d,(r) en fonction des caractéristiques du sismomètre (£, w.) et des caractéristiques du séisme (Z,, w). La figure 6 donne l'évolution du gain et de la phase de H{jw) en fonction du rapport 7 pour 6 différentes valeurs du coefficient d'amortissement £. --25 - --50 - --20 - -- 75 - --100 - Gain (dB) Phase (degrés) --125 - _60 - --150 - --175- --80 » 102 102 SE Figure 6 - Évolution du gain et de la phase de la fonction de transfert du sismomètre 716 Q15. Expliquer, de manière succincte, pourquoi l'évolution du gain et de la phase donnée sur la figure 6 correspond au modèle du sismomètre proposé précédemment. Q16. L'amplitude mesurée doit être identique à l'amplitude du séisme sur le plage de fré- quence correspondant à l'exigence définie dans le tableau 1. Comment faut-il choisir la pulsation propre &, par rapport à la pulsation w de la secousse sismique ? Com- menter physiquement ce résultat. Q17. Quel est le meilleur choix pour le coefficient d'amortissement £ pour que la réponse temporelle du sismomètre à un échelon soit la plus rapide sans dépassement ? À partir des données de la figure 6, évaluer la valeur minimale de &w, correspondante en fonction de la fréquence des ondes sismiques à mesurer. Le sismomètre étudié a une pulsation propre de 0,1 rad-s5"} et un coefficient d'amortissement v2 de --. 2 Q18. Concliure sur les fréquences de séisme que ce sismomètre est capable de mesurer. L'exigence du cahier des charges est-elle vérifiée ? Partie Il - Localisation du séisme L'objectif de cette partie est de modéliser la localisation de l'épicentre du séisme à partir de l'estimation des distances entre chaque station et le séisme. Epicenter | f2 / / À Z£ Seismic Station A NW Ak= À, Jp, À A / A 74 4 À tn V4 / 4 As, # 2 £" / LNhA À)» 4 A, A/ À, À À, / / À À / A / / À ç, gs / /! FE 4 A DT 4 & , ? 2 mA À ,,A A ,AËÀ Ss À À : s A / 7\ / 2 A À À ... À 4 À A # 1 Z ; % Cr À / £ 2 à A 24 A "A À À / 1 À A A / / / 2 \» À 22 2 / £ | / 4 À / y A À, À AA y #\ À À à À À y. A Y 2 2 à A 4 " LAN 2 A ss & : A,2 A À À «4 8 AR PA A 4. 1 : 2 Ch. 4 ë 48 À A4 À AAX À 24 A7 à ARA A A4 4 | 50 km / à L À » | 7x £ à / . / ne es A, | 4 A /y { Æ / Um 2 4 f À 4 / À À 4 = ( / VA À 2 L / / / / eu A [4 Figure 7 - Localisation de l'épicentre du séisme du 11 mars 2011 au large du Japon (Données USGS earthquake) 8/16 La localisation d'un séisme consiste à identifier l'endroit précis où il s'est produit. Les carac- téristiques suivantes sont ainsi définies : e hypocentre : point précis où a débuté le phénomène de rupture : c'est à partir de ce point que sont émis les ondes sismiques mesurées ensuite par les sismomètres. Ses coordonnées sont définies par sa latitude, sa longitude et sa profondeur. e épicentre : projection à la surface de la Terre de l'hypocentre. Ce point est défini par ses coordonnées géographiques (latitude et longitude). Ces coordonnées sont notées x et y dans la suite du sujet. Le principe de la localisation des séismes est la trilatération des informations fournies par les enregistrements de plusieurs stations disposant de sismomètres. Les mesures sont en- registrées dans 3 directions orthogonales : 2 horizontales (Est-Ouest et Nord-Sud) et une verticale. La figure 7 donne la localisation de l'épicentre du séisme au large du Japon en mars 2011. Des centaines de stations ont enregistré le séisme via des sismomètres et ont pu estimer la localisation de l'épicentre du séisme. L'analyse des données des sismogrammes permet de déterminer la distance r; entre la sta- tion à située aux coordonnées (x;,y;) et l'épicentre du séisme situé aux coordonnées (x,,y.). Cette analyse complexe n'est pas étudiée dans ce sujet. Pour cela, chaque station :, de coordonnées (x:;,y;), est positionnée sur une carte. Le rayon du cercle de centre (x:;,y;) qui passe par l'épicentre (x,,y.) est noté r.;. L'évaluation des distances r; est complexe et peut engendrer des erreurs. De ce fait, le recoupement des données issues des différentes stations de mesure ne fait que situer l'épicentre dans une certaine zone (figure 8a). Pour approximer ce point (x.,y.), le principe de la modélisation plane associée est donnée sur la figure 8b pour 3 stations de mesure. 14 - --- Station 1 14 - PTT. --- Station 1 --.- Station 2 droite d2 7° droite d:3 A --.- Station 2 / 12 - \ mms Station 3 12 - J N Station 3 = À 20 +} | 7. 10 4 ET s° U..., + * °° . .... + * *. r ss + * + un \ . \ * - un LD ss uns * , un LL asus zone de localisation | EN de l'épicentre (x.,y.) _5 0 5 10 15 _5 0 5 10 15 (a) Intersection de cercles (b) Intersection de droites Figure 8 - Principe de localisation de l'épicentre d'un séisme 9/16 Pour obtenir un système linéaire à résoudre, les coordonnées de l'épicentre sont définies en créant des droites dont les équations sont données par la différence terme à terme des équations de deux cercles. L'intersection des droites va donner la position de l'épicentre. Q19. Dans le cas donné sur la figure 8a, écrire, de manière littérale, les équations de chaque cercle. Q20. Développer les équations des cercles des stations 1 et 2. Effectuer la différence terme à terme et en déduire l'équation de la droite d,, de la figure 8b. Effectuer l'application numérique. Q21. Dans le cas donné sur la figure 8b, écrire, de manière littérale, les équations de chaque droite. En déduire le système d'équations linéaire permettant de localiser l'épi- centre et le mettre sous la forme AX = R avec À une matrice 3x2, X le vecteur donnant les coordonnées de l'épicentre et R un vecteur de 3 composantes. Q22. Evaluer le rang du système précédent. Simplifier le système matriciel précédent en le mettant sous la forme 4'X -- R où la nouvelle matrice 4' est carrée de dimension 2 x 2. L'évaluation des distances r; peut présenter des incertitudes, ce qui va entraîner des incerti- tudes sur la localisation de l'épicentre. L'incertitude sur la distance est notée 6R et l'incertitude sur la position de l'épicentre est notée 5X. L'équation devient : A'(X + 6X) = (R + 6R). Il est possible de montrer que la variation de la localisation du séisme est majorée par la variation de la distance r; grâce à l'expression : EX] _ ne = (IA AT [X1] ( ) I R]] [AT] où les normes utilisées ont été bien choisies. Le produit des normes ||4'|| :||47{|| s'appelle le conditionnement de la matrice 4'. La matrice A' est bien conditionnée lorsqu'une faible variation de R engendre une faible variation de X. Q23. Parmi les valeurs {--10 000, --1 000, ---1,1, 1 000, 10 000}, lesquelles sont plausibles et la- quelle entraînera le meilleur conditionnement de la matrice 4' ? Justifier. En pratique, il n'y a pas seulement 3 stations équipées de sismomètres qui permettent de donner des informations sur la localisation de l'épicentre. En effet, la figure 7 montre que plusieurs centaines de stations ont enregistré le séisme du 11 mars 2011 au Japon. Il est ainsi nécessaire d'analyser les données issues de toutes les stations qui ont détecté le séisme pour localiser l'épicentre du séisme le plus précisément possible. Dans ce cas, la matrice À possède 2 colonnes et de nombreuses lignes. La résolution du système AX -- R se fait par le calcul de la matrice pseudo-inverse de A. Cette pseudo-inverse permet de donner une solution de norme minimale à un système d'équations où il y a plus d'équations que d'inconnues. 10/16 La pseudo-inverse se définit de la manière suivante : si 'AA est inversible alors la solution de AX = R de norme minimale est donnée par A°R où A° est la pseudo-inverse de A définie par : AY = (AA): 'A. Q24. À partir du système précédemment défini, expliquer comment obtenir la localisation de l'épicentre. Partie III - Propagation d'un Tsunami L'objectif de cette partie est de modéliser la propagation du tsunami et d'estimer son temps de propagation à partir de l'épicentre. Dans cette partie, nous allons nous intéresser à la propagation du tsunami en mer afin de prévoir l'instant d'arrivée du tsunami sur les côtes. Pour cela, étudions la propagation uni- dimensionnelle selon l'axe (Ox) d'une onde de surface en eau peu profonde (la profondeur est très faible devant la longueur d'onde). L'eau sera considérée comme un fluide parfait et incompressible. Elle occupe au repos tout l'espace compris entre z -- 0 et z -- h (figure 9). Lors du passage de l'onde, la surface libre de l'eau en x est déplacée verticalement de {'(x, t). -- 5 ne or 0m 2 On note V le champ des vitesses de l'écoulement, celui-ci vérifie l'équation suivante : y _ _1 rad(P) + g (1) À U;z >
=
Où, x
Figure 9 - Surface libre de l'eau au passage de l'onde
11/16
Données numériques et notations
Q25.
Q26.
Q27.
- intensité du champ de pesanteur terrestre g = 10 ms";
- masse volumique de l'eau p = 1,0-10° kg-m°":
- longueur d'onde d'un tsunami 17 = 100 km en haute mer;
- amplitude &,., d'un tsunami en haute mer : quelques décimètres ;
- période d'un tsunami en haute mer, Tr = 30 min.
Justifier, à partir des ordres de grandeur proposés, qu'il est difficile de
détecter un
tsunami en haute mer.
"cu u r sg À
Justifier que le champ des vitesses vérifie V = v,(x,z,t)ü, + v,(x, z, t)u..
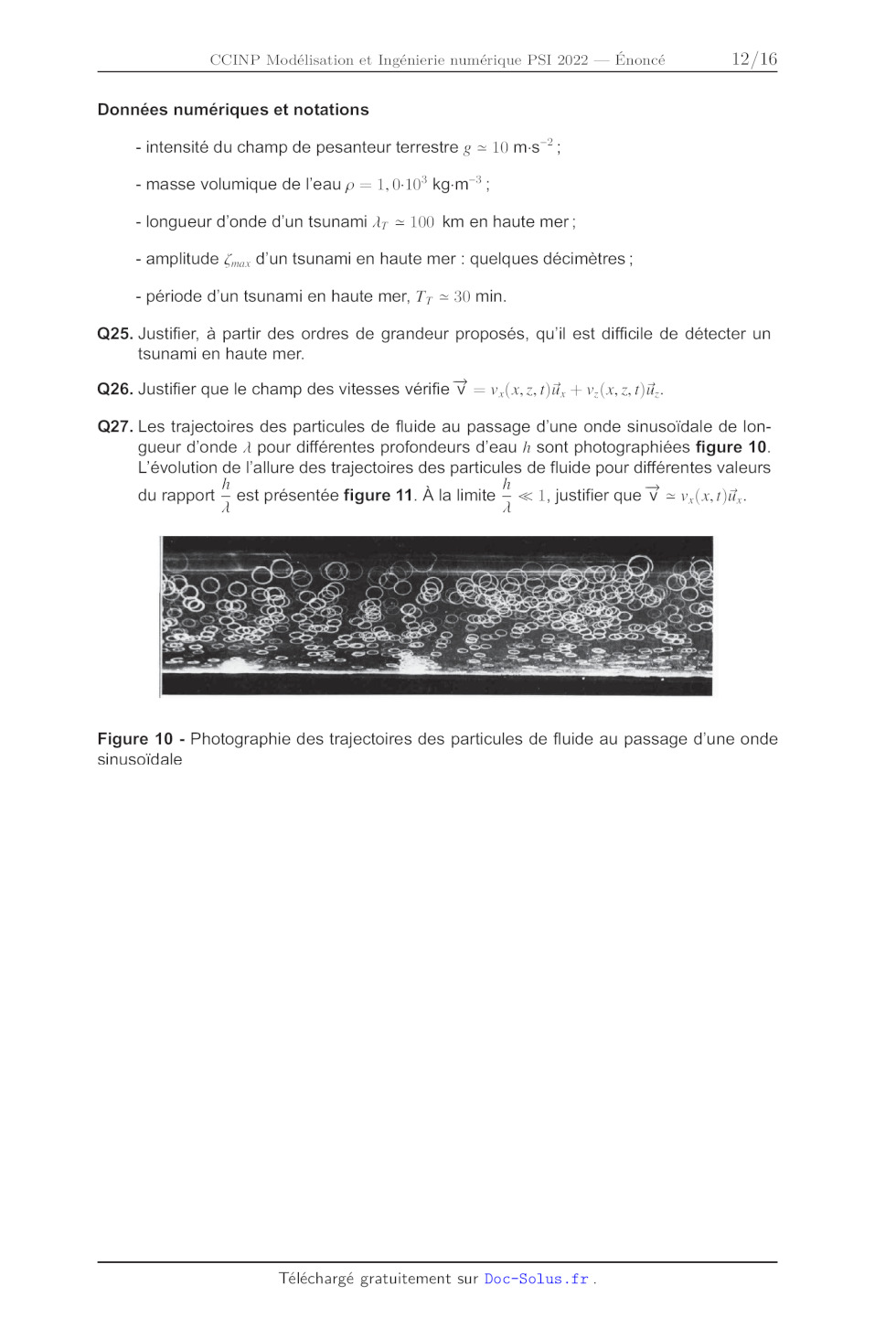
Les trajectoires des particules de fluide au passage d'une onde sinusoïdale de
lon-
gueur d'onde 1 pour différentes profondeurs d'eau À sont photographiées figure
10.
L'évolution de l'allure des trajectoires des particules de fluide pour
différentes valeurs
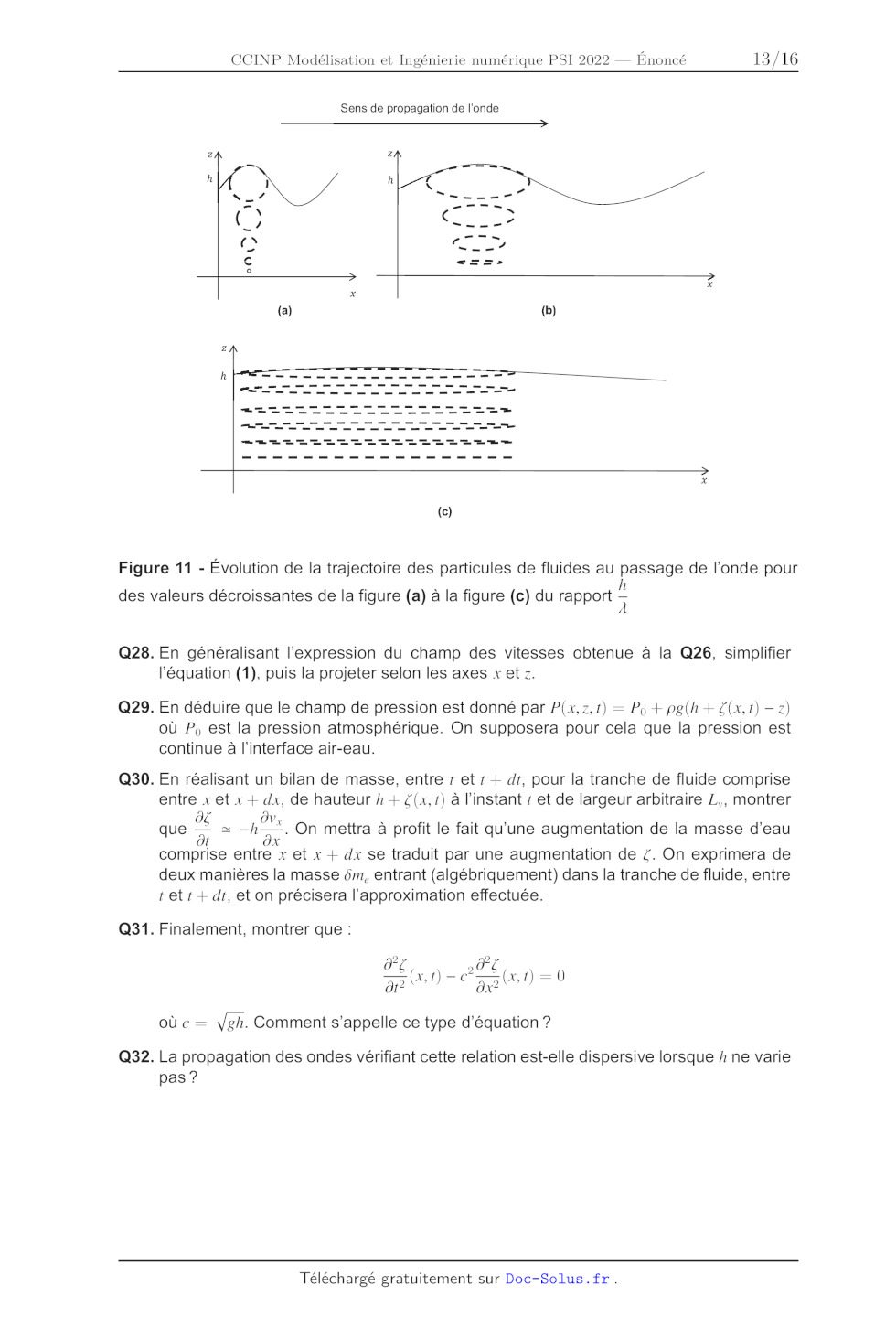
du rapport 7 est présentée figure 11. À la limite 7 < 1, justifier que VY = v,(X, tjs. Figure 10 - Photographie des trajectoires des particules de fluide au passage d'une onde sinusoïdale 12716 Sens de propagation de l'onde V ZA ZA OX / h EUR N # um" 7 \ CT =" -- >
C e==»
O VS ss
T X
X
(a) (b)
AN
& VW
(c)
Figure 11 - Évolution de la trajectoire des particules de fluides au passage de
l'onde pour
h
des valeurs décroissantes de la figure (a) à la figure (c) du rapport 7
Q28.
Q29.
Q30.
Q31.
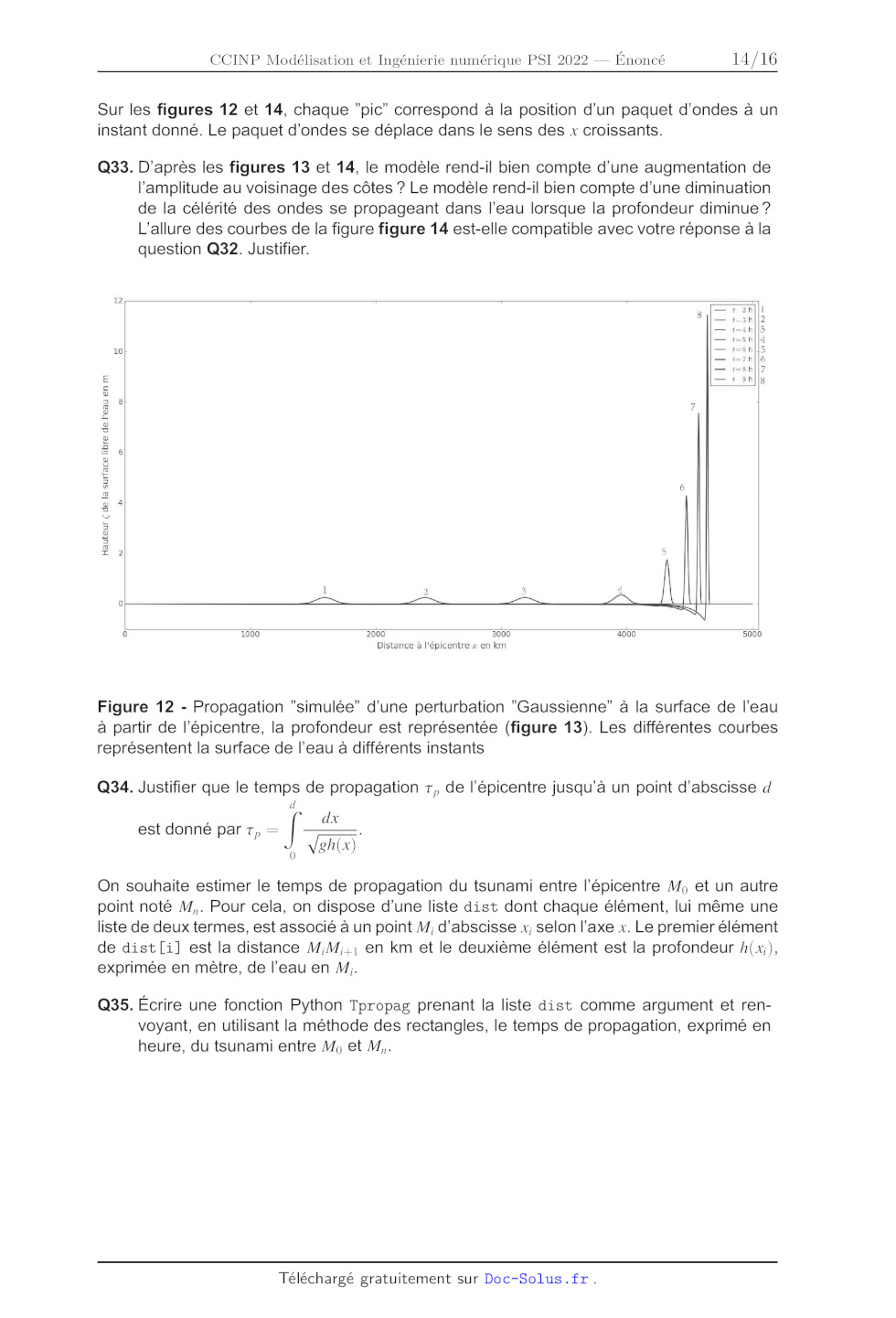
Q32.
En généralisant l'expression du champ des vitesses obtenue à la Q26, simplifier
l'équation (1), puis la projeter selon les axes x et z.
En déduire que le champ de pression est donné par P(x, z,t) = Po + pg(h +
&(x,t) -- 2)
où P, est la pression atmosphérique. On supposera pour cela que la pression est
continue à l'interface air-eau.
En réalisant un bilan de masse, entre r et : + dr, pour la tranche de fluide
comprise
entre x et x + dx, de hauteur h + £(x,r) à l'instant r et de largeur arbitraire
L,, montrer
OV
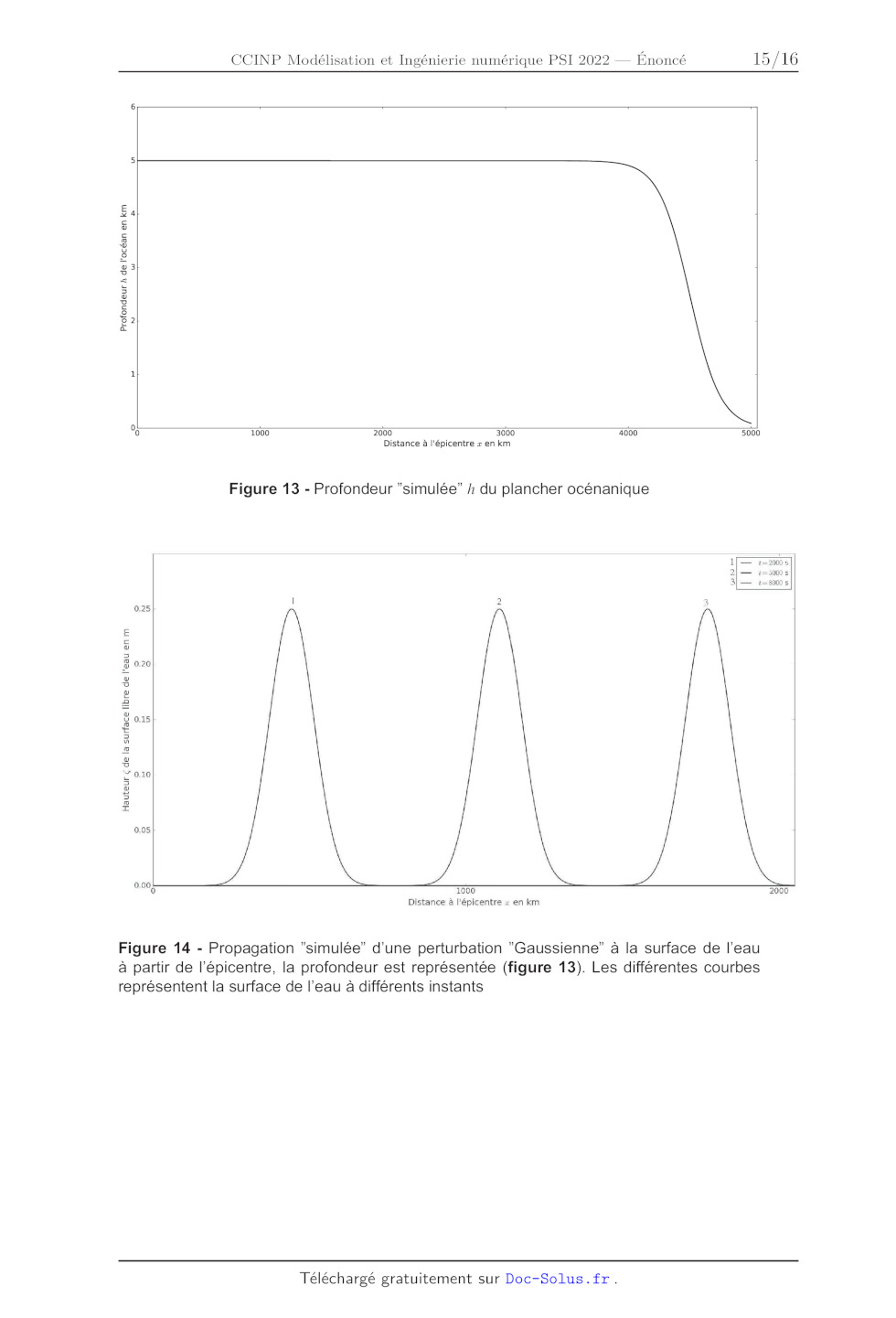
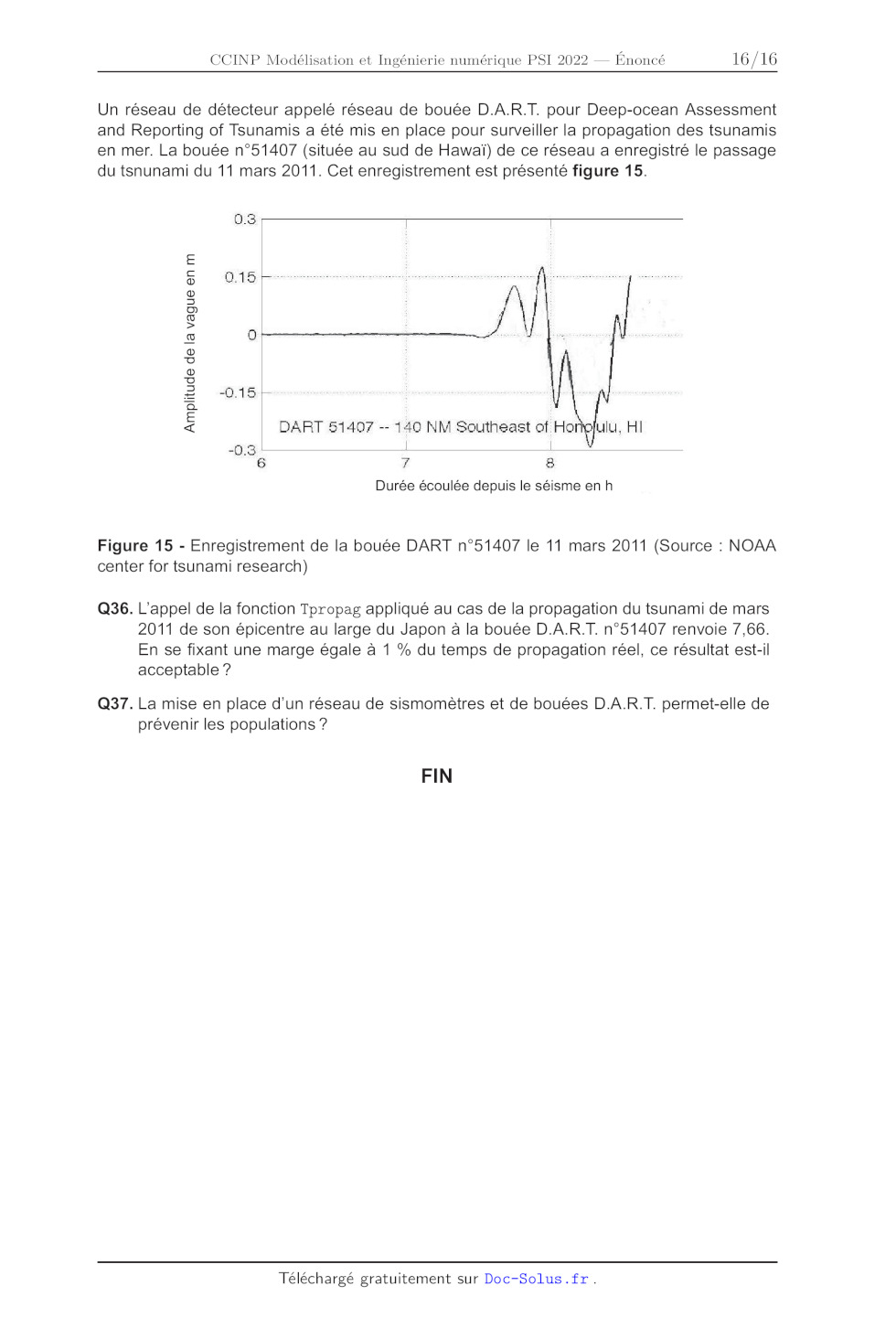
que < = --h -- X comprise entre x et x + dx se traduit par une augmentation de £. On exprimera de deux manières la masse ôm., entrant (algébriquement) dans la tranche de fluide, entre : et : + dt, et on précisera l'approximation effectuée. . On mettra à profit le fait qu'une augmentation de la masse d'eau Finalement, montrer que : dC oÙ Se 1) -- ct 1) = ( OÙ c -- Vgh. Comment s'appelle ce type d'équation ? La propagation des ondes vérifiant cette relation est-elle dispersive lorsque À ne varie pas ? 13/16 Sur les figures 12 et 14, chaque 'pic" correspond à la position d'un paquet d'ondes à un instant donné. Le paquet d'ondes se déplace dans le sens des x croissants. Q33. D'après les figures 13 et 14, le modèle rend-il bien compte d'une augmentation de l'amplitude au voisinage des côtes ? Le modèle rend-il bien compte d'une diminuation de la célérité des ondes se propageant dans l'eau lorsque la profondeur diminue ? L'allure des courbes de la figure figure 14 est-elle compatible avec votre réponse à la question Q32. Justifier. 12 =3 à 10+ || 7 Il 3" + D SJ UT À © DH Hauteur ç de la surface libre de l'eau en m A RS A A dl 0 1000 2000 3000 4000 5000 Distance à l'épicentre x en km Figure 12 - Propagation "simulée" d'une perturbation "Gaussienne" à la surface de l'eau à partir de l'épicentre, la profondeur est représentée (figure 13). Les différentes courbes représentent la surface de l'eau à différents instants Q34. Justifier que le temps de propagation 7, de l'épicentre jusqu à un point d'abscisse d d dx en) On souhaite estimer le temps de propagation du tsunami entre l'épicentre M, et un autre point noté M,. Pour cela, on dispose d'une liste aist dont chaque élément, lui même une liste de deux termes, est associé à un point M; d'abscisse x; selon l'axe x. Le premier élément de dist{[il est la distance M;M;,;, en km et le deuxième élément est la profondeur A(x;), exprimée en mètre, de l'eau en M.. est donné par Tr, -- Q35. Écrire une fonction Python Tpropag prenant la liste dist comme argument et ren- voyant, en utilisant la méthode des rectangles, le temps de propagation, exprimé en heure, du tsunami entre M, et M.,. 14/16 5 £al C OU C © SU U O O 3+ TD rQ 5 OU TD C © 6 2} Q. 1. D 1000 2000 3000 4000 5000 Distance à l'épicentre x en km = 5): 1 5 r u Figure 13 - Profondeur "simulée" À du plancher océnanique 1| -- 12000 s 21 -- +t=5000 5 3|-- +-=8000 s I 2 , 0.25 L | E C U cd Y 0.20 | | U TD o £ 9 0.15! | © E J n © U T 7 0.10} : re | U 5 © LE 0.05 | | GORE 1000 2000 Distance à l'épicentre x en km Figure 14 - Propagation "simulée" d'une perturbation "Gaussienne" à la surface de l'eau à partir de l'épicentre, la profondeur est représentée (figure 13). Les différentes courbes représentent la surface de l'eau à différents instants 15/16 Un réseau de détecteur appelé réseau de bouée D.A.R.T. pour Deep-ocean Assessment and Reporting of Tsunamis a été mis en place pour surveiller la propagation des tsunamis en mer. La bouée n°51407 (située au sud de Hawaï) de ce réseau a enregistré le passage du tsnunami du 11 mars 2011. Cet enregistrement est présenté figure 15. 0.3 E S 015- O =) O) © >
oe 0 7 dE:
O
TD
O à
D : :
2 | |
< DART 51407 -- 140 NM Southeast of Honolulu, HI _0 3 | | 6 Î 8 Durée écoulée depuis le séisme enh Figure 15 - Enregistrement de la bouée DART n°51407 le 11 mars 2011 (Source : NOAA center for tsunami research) Q36. L'appel de la fonction Tpropag appliqué au cas de la propagation du tsunami de mars 2011 de son épicentre au large du Japon à la bouée D.A.R.T. n°51407 renvoie 7,66. En se fixant une marge égale à 1 % du temps de propagation réel, ce résultat est-il acceptable ? Q37. La mise en place d'un réseau de sismomètres et de bouées D.A.R.T. permet-elle de prévenir les populations ? FIN 16/16 NATIONALE - 221176 - D'après documents fournis IMPRIMERIE