
CCINP Modélisation et Ingénierie numérique PSI 2018
| Thème de l'épreuve | Modélisation du captage du courant dans un train à grande vitesse |
| Principaux outils utilisés | électricité, modélisation numérique, diffusion thermique, mécanique du solide, asservissement |
| Mots clefs | caténaire, loi de Newton, statique, chaînette |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - -
Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
SESSION 2018 PSIM106
u: CONCOURSCOMMUNS
"' POLYTECHNIQUES
ÉPREUVE SPÉCIFIQUE - FILIÈRE PSI
MODÉLISATION ET INGÉNIERIE NUMÉRIQUE
Jeudi3mai:8h-12h
N.B. : le candidat attachera la plus grande importance à la clarté, à la
précision et a la concision de
la rédaction. Si un candidat est amené à repérer ce quipeut lui sembler être
une erreur d'énoncé, il le
signalera sur sa copie et devra poursuivre sa composition en expliquant les
raisons des initiatives
qu 'il a été amené aprendre.
Les calculatrices sont autorisées
Le sujet est composé de 20 pages d'énoncé. Il comporte 3 parties indépendantes.
Il est demandé au candidat de bien vouloir préciser le numéro de chaque
question traitée. Les résultats
attendus seront encadrés.
1/20
MODÉLISATION DU CAPTAGE DU COURANT
DANS UN TRAIN A GRANDE VITESSE
Présentation générale
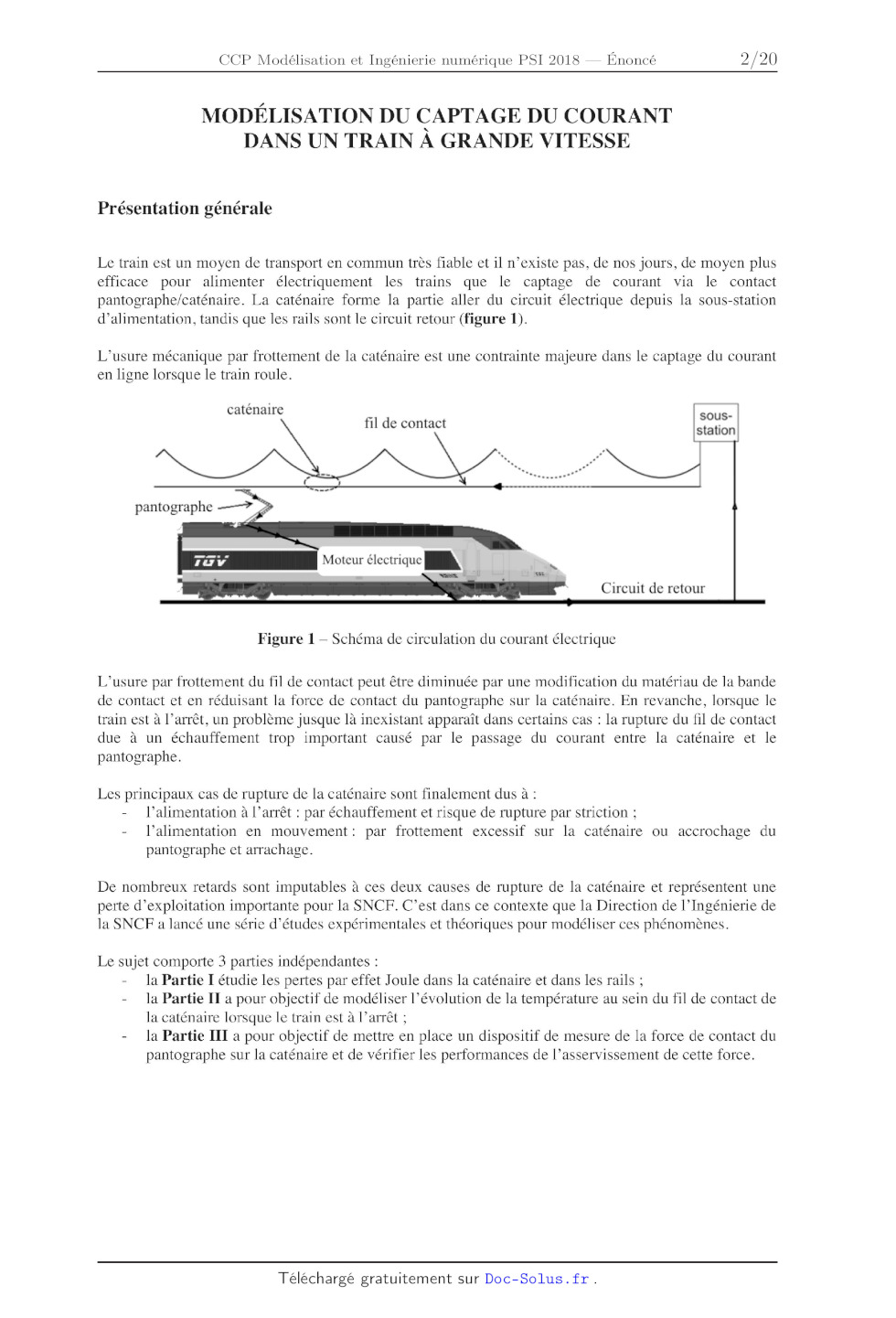
Le train est un moyen de transport en commun très fiable et il n'existe pas, de
nos jours, de moyen plus
efficace pour alimenter électriquement les trains que le captage de courant via
le contact
pantographe/caténaire. La caténaire forme la partie aller du circuit électrique
depuis la sous--station
d'alimentation, tandis que les rails sont le circuit retour (figure 1).
L'usure mécanique par frottement de la caténaire est une contrainte majeure
dans le captage du courant
en ligne lorsque le train roule.
caténaire _
fil de contact
pantographe ----*"'
Moteur électrique -
--"'
Circuit de retour
Figure 1 -- Schéma de circulation du courant électrique
L'usure par frottement du fil de contact peut être diminuée par une
modification du matériau de la bande
de contact et en réduisant la force de contact du pantographe sur la caténaire.
En revanche, lorsque le
train est à l'arrêt, un problème jusque là inexistant apparaît dans certains
cas : la rupture du fil de contact
due à un échauffement trop important causé par le passage du courant entre la
caténaire et le
pantographe.
Les principaux cas de rupture de la caténaire sont finalement dus à :
-- l'alimentation à l'arrêt : par échauffement et risque de rupture par
striction ;
-- l'alimentation en mouvement : par frottement excessif sur la caténaire ou
accrochage du
pantographe et arrachage.
De nombreux retards sont imputables à ces deux causes de rupture de la
caténaire et représentent une
perte d'exploitation importante pour la SNCF. C'est dans ce contexte que la
Direction de l'Ingénierie de
la SNCF a lancé une série d'études expérimentales et théoriques pour modéliser
ces phénomènes.
Le sujet comporte 3 parties indépendantes :
-- la Partie I étudie les pertes par effet J oule dans la caténaire et dans les
rails ;
-- la Partie II a pour objectif de modéliser l'évolution de la température au
sein du fil de contact de
la caténaire lorsque le train est à l'arrêt ;
-- la Partie III a pour objectif de mettre en place un dispositif de mesure de
la force de contact du
pantographe sur la caténaire et de vérifier les performances de
l'asservissement de cette force.
2/20
Partie I - Étude préliminaire de la ligne d'alimentation
Objectif : proposer une modélisation du contact électrique
pantographe--caténaire en vue d'évaluer les
pertes par effet J oule.
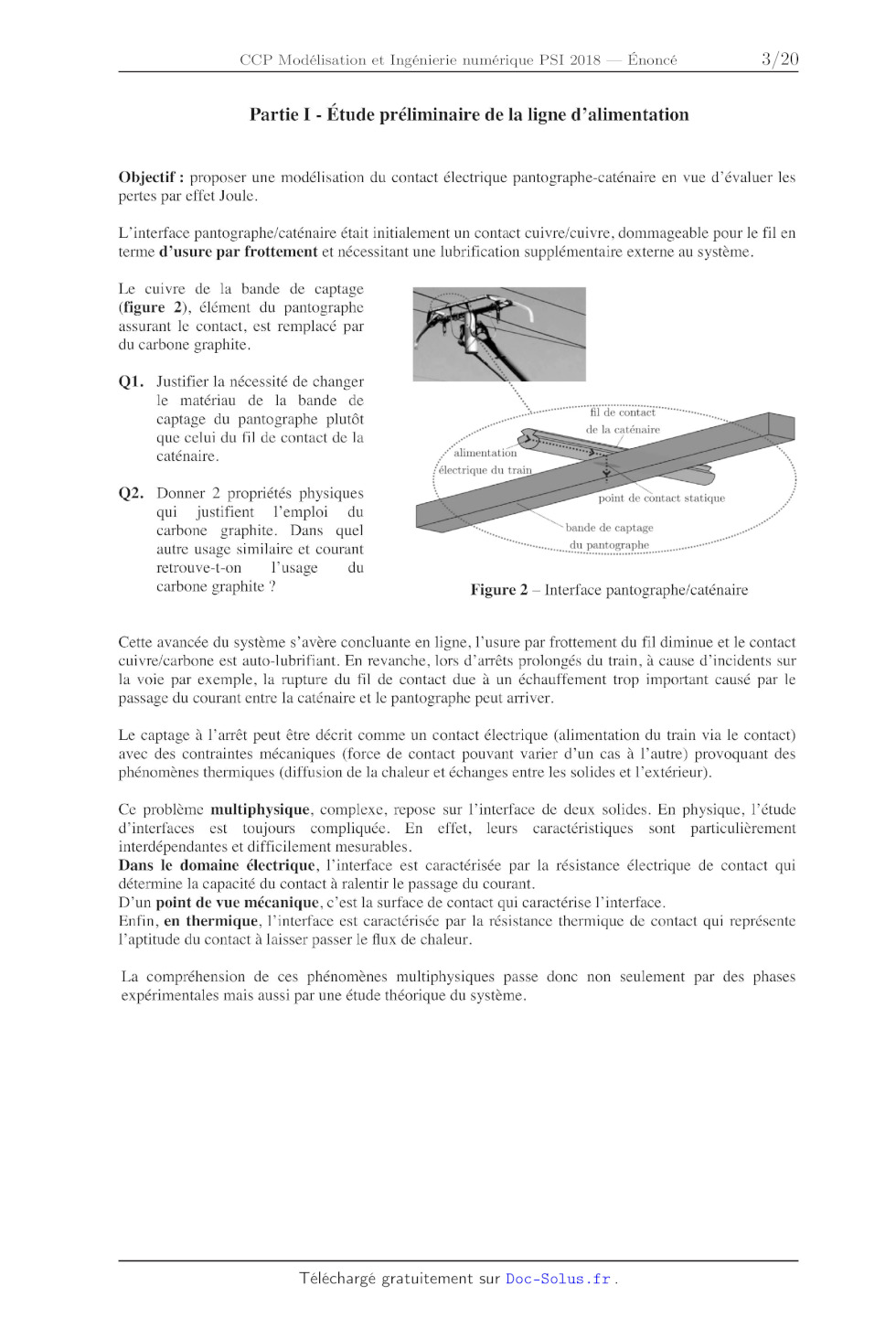
L'interface pantographe/caténaire était initialement un contact cuivre/cuivre,
dommageable pour le fil en
terme d'usure par frottement et nécessitant une lubrification supplémentaire
externe au système.
Le cuivre de la bande de captage
(figure 2), élément du pantographe
assurant le contact, est remplacé par
du carbone graphite.
QI. Justifier la nécessité de changer
le matériau de la bande de
captage du pantographe plutôt
que celui du fil de contact de la
caténaire.
alimentation
{électrique du train
Q2. Donner 2 propriétés physiques
qui justifient l'emploi du
carbone graphite. Dans quel
autre usage similaire et courant
retrouve--t--on l'usage du
carbone gr aphite ? Figure 2 -- Interface pantographe/caténaire
Cette avancée du système s'avère concluante en ligne, l'usure par frottement du
fil diminue et le contact
cuivre/carbone est auto--lubrifiant. En revanche, lors d'arrêts prolongés du
train, à cause d'incidents sur
la voie par exemple, la rupture du fil de contact due à un échauffement trop
important causé par le
passage du courant entre la caténaire et le pantographe peut arriver.
Le captage à l'arrêt peut être décrit comme un contact électrique (alimentation
du train via le contact)
avec des contraintes mécaniques (force de contact pouvant varier d'un cas à
l'autre) provoquant des
phénomènes thermiques (diffusion de la chaleur et échanges entre les solides et
l'extérieur).
Ce problème multiphysique, complexe, repose sur l'interface de deux solides. En
physique, l'étude
d'interfaces est toujours compliquée. En effet, leurs caractéristiques sont
particulièrement
interdépendantes et difficilement mesurables.
Dans le domaine électrique, l'interface est caractérisée par la résistance
électrique de contact qui
détermine la capacité du contact à ralentir le passage du courant.
D'un point de vue mécanique, c'est la surface de contact qui caractérise
l'interface.
Enfin, en thermique, l'interface est caractérisée par la résistance thermique
de contact qui représente
l'aptitude du contact à laisser passer le flux de chaleur.
La compréhension de ces phénomènes multiphysiques passe donc non seulement par
des phases
expérimentales mais aussi par une étude théorique du système.
3/20
1.1 -- Calcul des pertes dues àla caténaire
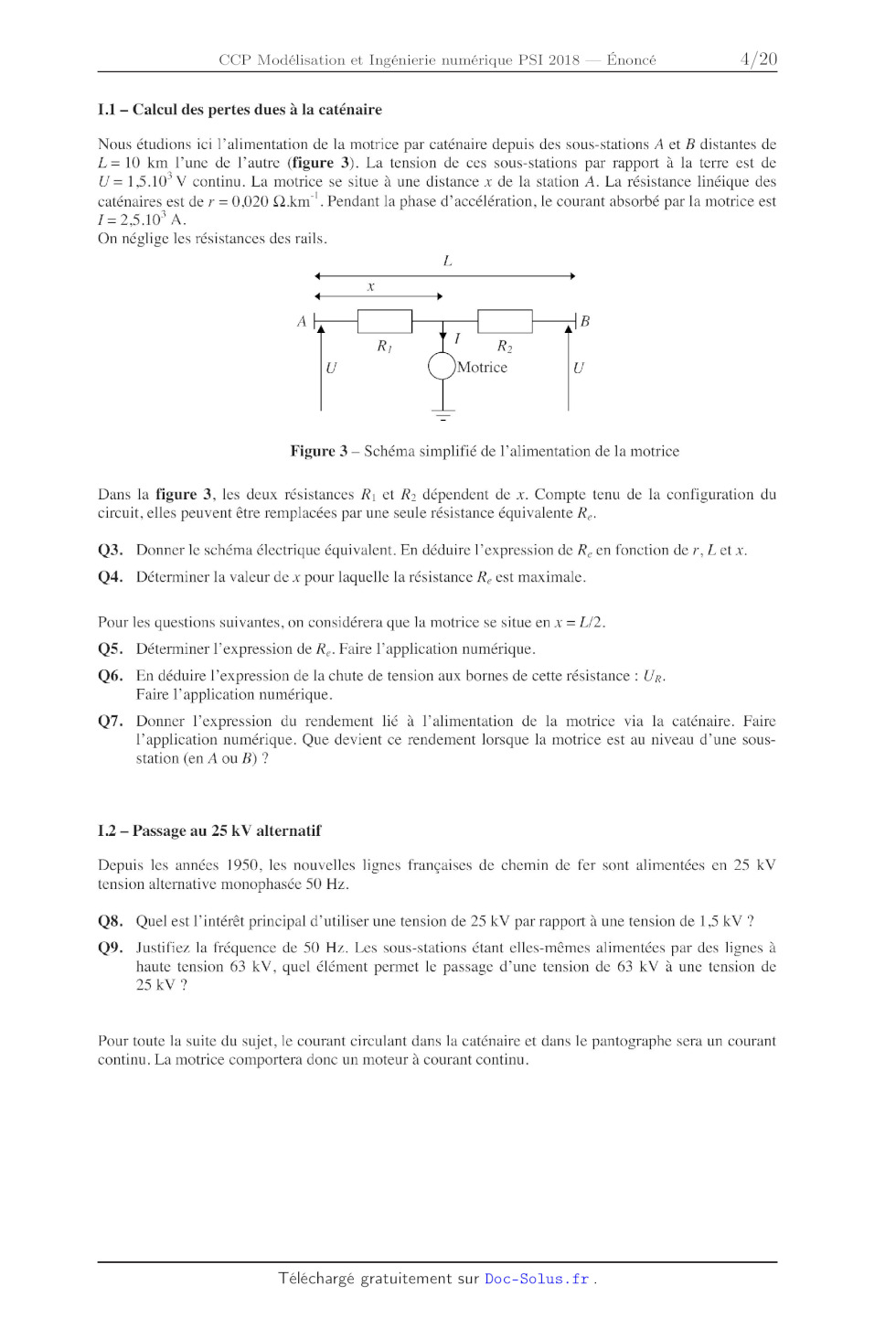
Nous étudions ici l'alimentation de la motrice par caténaire depuis des
sous--stations A et B distantes de
L: 10 km l'une de l'autre (figure 3). La tension de ces sous--stations par
rapport à la terre est de
U : 1,5.103 V continu. La motrice se situe à une distance x de la station A. La
résistance linéique des
caténaires est de r = 0,020 Q.km'l. Pendant la phase d'accélération, le courant
absorbé par la motrice est
1 : 25.103 A.
On néglige les résistances des rails.
Figure 3 -- Schéma simplifié de l'alimentation de la motrice
Dans la figure 3, les deux résistances R1 et R2 dépendent de x. Compte tenu de
la configuration du
circuit, elles peuvent être remplacées par une seule résistance équivalente Re.
Q3. Donner le schéma électrique équivalent. En déduire l'expression de Re en
fonction de r, L et x.
Q4. Déterminer la valeur de x pour laquelle la résistance Re est maximale.
Pour les questions suivantes, on considérera que la motrice se situe en x : L/2.
QS. Déterminer l'expression de Re. Faire l'application numérique.
Q6. En déduire l'expression de la chute de tension aux bornes de cette
résistance : U R.
Faire l'application numérique.
Q7. Donner l'expression du rendement lié à l'alimentation de la motrice via la
caténaire. Faire
l'application numérique. Que devient ce rendement lorsque la motrice est au
niveau d'une sous--
station (en A ou B) ?
1.2 -- Passage au 25 kV alternatif
Depuis les années 1950, les nouvelles lignes françaises de chemin de fer sont
alimentées en 25 kV
tension alternative monophasée 50 Hz.
Q8. Quel est l'intérêt principal d'utiliser une tension de 25 kV par rapport à
une tension de 1,5 kV ?
Q9. Justifiez la fréquence de 50 Hz. Les sous--stations étant elles--mêmes
alimentées par des lignes à
haute tension 63 kV, quel élément permet le passage d'une tension de 63 kV à
une tension de
25 kV ?
Pour toute la suite du sujet, le courant circulant dans la caténaire et dans le
pantographe sera un courant
continu. La motrice comportera donc un moteur à courant continu.
4/20
Partie II - Modélisation thermique dela caténaire, train à l'arrêt
Objectif : connaître l'évolution de la température au sein de la caténaire
lorsque le train est à l'arrêt.
On décompose pour cela la caténaire en plusieurs zones : P1, P2 et la zone de
contact. Nous nous
limiterons à une étude simplifiée de ces zones (figure 4).
Figure 4 -- Caténaire et bande de captage du pantographe, au niveau de la zone
de contact
La caténaire est modélisée par un cylindre de rayon R, en cuivre de
conductivité électrique 7/, de
conductivité thermique À, de capacité thermique massique c et de masse
volumique p. Le pantographe
est modélisé dans la figure 4 par un parallélépipède de largeur LC.
Pour l'étude de la caténaire, on utilisera les coordonnées polaires (r, 9, z).
L'axe z est l'axe de la
caténaire, orienté sur la figure 4 et üz est le vecteur unitaire.
Les échanges conducto--convectifs à l'interface caténaire/ air sont régis par
la relation de Newton
5<ÏD=h(T paroi --Ïl)d5 (l) avec 5 (D le flux thermique en Watt (W) fourni par la caténaire à l'air à travers une surface dS , T la paroi température de la caténaire en r = R, Te : 20 °C la température de l'air et h un coefficient constant. II.1 -- Régime transitoire dans la zone P1 : --L1 H
..\: I..
A:
! | |
L1 Il ., L,_,
Figure 5 -- Discrétisation spatiale de la caténaire autour de la zone de contact
5/20
À l'arrêt, la caténaire est parcourue par un courant continu d'intensité I = 60
A, réparti uniformément.
On prend comme système au sein de la zone P1 un cylindre plein en cuivre, de
rayon R, compris entre z
et z + Az étudié entre tet t+ At (figure 5). La relation de Newton (l) définie
précédemment s'applique.
Q10. Pour le système défini précédemment, donner les expressions des flux
thermiques entrant en z,
sortant en z + Az et sur les parois latérales (pertes conducto--convectives).
Q11. Donner l'expression de l'énergie dissipée par effet Joule dans le système
entre t et t+ At en
fonction de Az, At, I, 7/ et R le rayon de la caténaire.
Q12. En appliquant le premier principe de la thermodynamique au système et en
considérant A2 et At
comme des infiniments petits du premier ordre, montrer que T est solution d'une
équation aux
dérivées partielles de la forme
en 82T
_: ----b T--T d,
Bt a ôz2 ( e)+
avec a,b et d des constantes à exprimer en fonction de R ,À, p,c, 7,1 et h.
11.2 -- Résolution numérique dans la zone P1
L'objectif est de résoudre numériquement l'équation aux dérivées partielles
T 2T
È-- : a Î)--z--bT + e avec 61,19 et e des constantes. (2)
t Z
Soient f une fonction de classe C2 sur un intervalle I et xe I .
Q13. À l'aide de la formule de Taylor--Young, écrire le développement limité à
l'ordre 2 de f (x + 8)
lorsque 8--> 0. Déterminer aussi le développement limité à l'ordre 2 de f (x --
6) lorsque 8--> O.
Q14. En déduire la valeur de :
s-->O 82
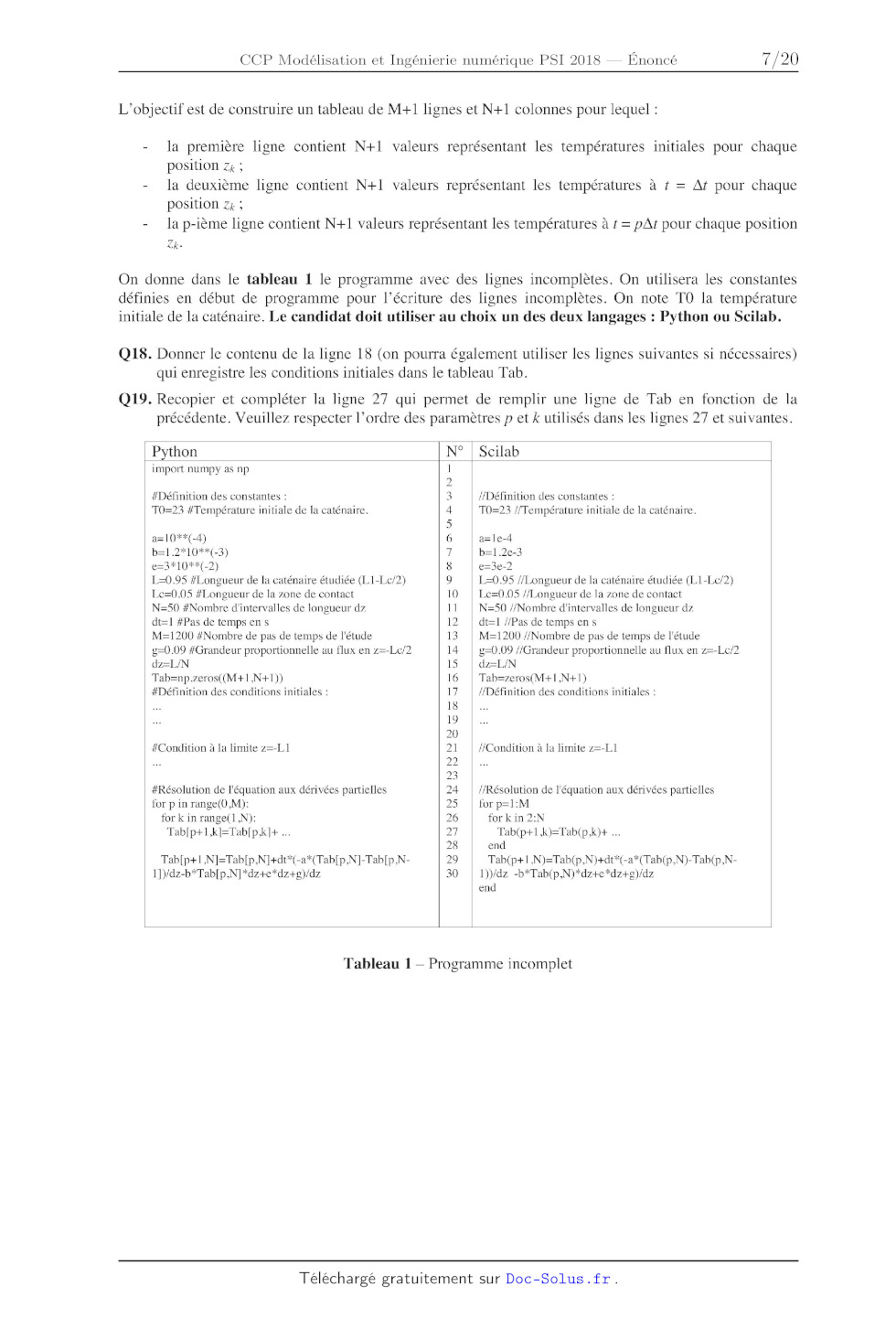
liH{f(x+s)--2f 0 due au transfert de chaleur provenant
de la zone de contact. Cette
condition est définie aux lignes 29 et 30.
Q21. En faisant un bilan d'énergie sur le dernier élément de largeur Az situé
juste avant z = -- LC /2,
déterminer l'expression du terme g de la ligne 30, qui traduit le transfert de
chaleur, en fonction de
j, pet c.
Q22. En exploitant la figure 6, indiquer si le régime stationnaire est atteint
ou non au bout de 1200 s.
Justifier sans aucun calcul.
Température en °C
zenm
Figure 6 -- Résultats de la résolution de l'équation : température en fonction
de z pour différents temps
11.3 -- Modélisation de la zone de contact de longueur Le, au sein de la
caténaire
Pour établir l'expression des pertes joules, il est nécessaire de connaître le
champ de potentiel V(r,9,z)
partout dans la zone de contact de longueur LC, au sein de la caténaire. D'un
point de vue électrique, on
se place en régime stationnaire. On considère la densité volumique de charge
nulle dans la caténaire.
Q23. Quelle relation relie le champ électrique Ë et le potentiel V ?
Q24. En utilisant une équation de Maxwell, déduire une équation simple pour le
champ de potentiel V.
8/20
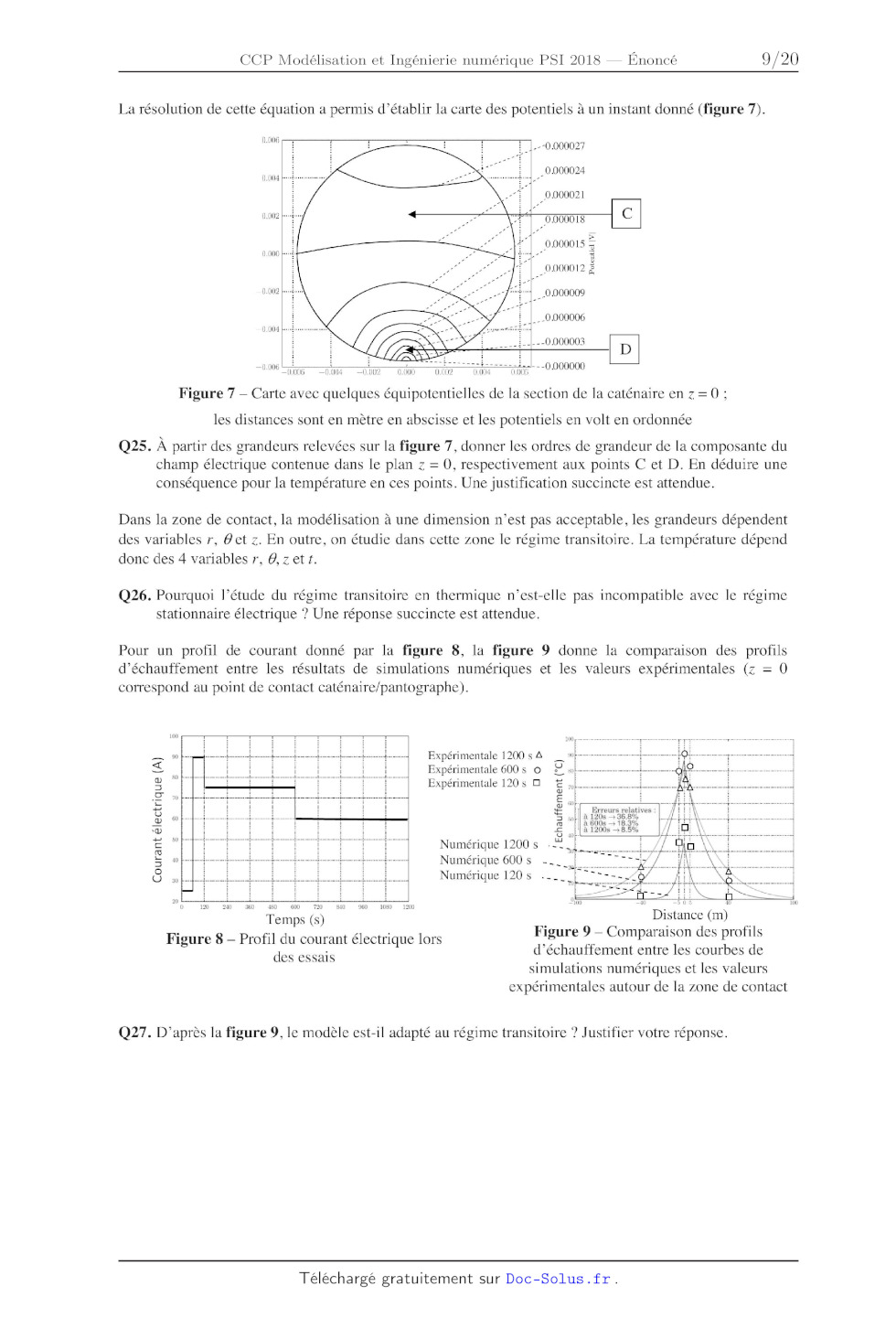
La résolution de cette équation a permis d'établir la carte des potentiels a un
instant donné (figure 7).
0.006
; _ ,--0.000027
0.000024
0004 - / ,
0000021
0002 , 0.000018
V]
©
©
©
©
©
._
KJ'4
0000
Potentiel
" __0000012
41002 - _ ,0 000009
__ 0.000006
...0.000003 |î|
! _______ --.0000000
f(I.0ll/l -
;
*ll 000
i î ; i '
41006 f0.00/1 41002 0000 0002 0.001 0006
Figure 7 -- Carte avec quelques équipotentielles de la section de la caténaire
en z = 0 ;
les distances sont en mètre en abscisse et les potentiels en volt en ordonnée
Q25. À partir des grandeurs relevées sur la figure 7, donner les ordres de
grandeur de la composante du
champ électrique contenue dans le plan z = 0, respectivement aux points C et D.
En déduire une
conséquence pour la température en ces points. Une justification succincte est
attendue.
Dans la zone de contact, la modélisation à une dimension n'est pas acceptable,
les grandeurs dépendent
des variables r, 0 et z. En outre, on étudie dans cette zone le régime
transitoire. La température dépend
donc des 4 variables r, 9, z et t.
Q26. Pourquoi l'étude du régime transitoire en thermique n'est--elle pas
incompatible avec le régime
stationnaire électrique ? Une réponse succincte est attendue.
Pour un profil de courant donné par la figure 8, la figure 9 donne la
comparaison des profils
d'échauffement entre les résultats de simulations numériques et les valeurs
expérimentales (z = 0
correspond au point de contact caténaire/pantographe).
lun
un
Expérimentale 1200 S A
Expérimentale 600 S o
Expérimentale 120 s El
0'l> ---
.--... ...
Numérique 1200 s
Numérique 600 s
Numérique 120 s
... ...
Courant électrique (A)
il... *... ... lu....
Distance (rn)
Figure 9 -- Comparaison des profils
d'échauffement entre les courbes de
simulations numériques et les valeurs
expérimentales autour de la zone de contact
-.'v 120 210 J... ;... nl... 7211 \... 000 NM: 3200
Temps (3)
Figure 8 -- Profil du courant électrique lors
des essais
Q27. D'après la figure 9, le modèle est--il adapté au régime transitoire ?
Justifier votre réponse.
9/20
Partie III - Risque de rupture de la caténaire par frottement excessif
Objectif : dans cette partie, on souhaite étudier la possibilité de maintenir
la force de contact sur la
caténaire dans des limites acceptables.
Les incidents de rupture de la caténaire sont aussi d'origine mécanique. Le
principal problème est la
dégradation du fil de contact et des bandes de captage due à une usure
mécanique lorsque l'effort
appliqué est trop important ou due à une usure électrique lorsque l'effort
appliqué est insuffisant. En
effet, il se forme dans ce dernier cas des arcs électriques qui endommagent
rapidement le système.
III.] -- Mesure de l'effort sur la caténaire
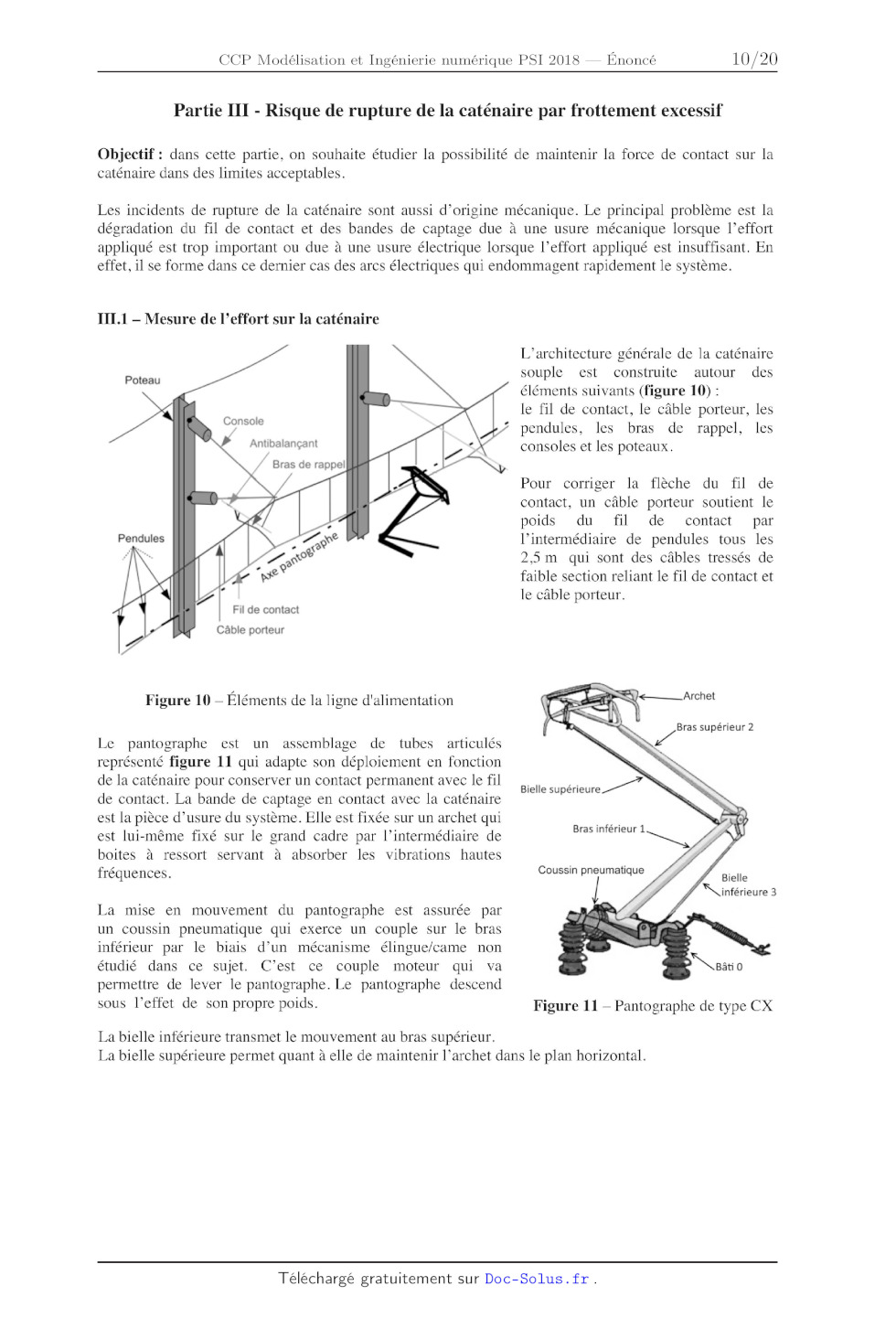
L'architecture générale de la caténaire
souple est construite autour des
éléments suivants (figure 10) :
le fil de contact, le câble porteur, les
pendules, les bras de rappel, les
consoles et les poteaux.
Console
' Antnbalançant
' Bras de rappel
Pour corriger la flèche du fil de
contact, un câble porteur soutient le
poids du fil de contact par
l'intermédiaire de pendules tous les
2,5 m qui sont des câbles tressés de
faible section reliant le fil de contact et
le câble porteur.
Câble porteur
Figure 10 -- Éléments de la ligne d'alimentation "<\A'°het Bras supérieur 2 Le pantographe est un assemblage de tubes articulés représenté figure 11 qui adapte son déploiement en fonction __ de la caténaire pour conserver un contact permanent avec le fil . , _ /7 , _ Blelle superleure de contact. La bande de captage en contact avec la caténaire est la pièce d'usure du système. Elle est fixée sur un archet qui est lui--même fixé sur le grand cadre par l'intermédiaire de boites à ressort servant à absorber les vibrations hautes fréquences, Coussin pneumatique Bras inférieur 1 La mise en mouvement du pantographe est assurée par un coussin pneumatique qui exerce un couple sur le bras inférieur par le biais d'un mécanisme élingue/came non étudié dans ce sujet. C'est ce couple moteur qui va permettre de lever le pantographe. Le pantographe descend sous l'effet de son propre poids. Figure 11 -- Pantographe de type CX La bielle inférieure transmet le mouvement au bras supérieur. La bielle supérieure permet quant à elle de maintenir l'archet dans le plan horizontal. 10/20 La distance entre le toit du train et la caténaire n'est toutefois pas constante, car tous les trains ne sont pas identiques, mais également car il existe différents modèles de pantographe. La caténaire elle--même n'est pas toujours parallèle à la voie à cause des ouvrages d'art, mais également en raison de la flèche inévitable de la caténaire entre deux poteaux. Pour pallier ces variations, nous décidons d'étudier l'asservissement de cet effort. Dans un premier temps, nous rechercherons une façon de mesurer cet effort puis dans un second temps, nous nous intéresserons aux performances de l'asservissement. Choix de l'emplacement du capteur d'effort Hypothèses simplificatrices : en toute rigueur, le pantographe subit des efl0rts statiques, dynamiques dûs à la masse de l'archet ainsi que des efi'orts aérodynamiques avec la vitesse du train. Nous nous limiter0ns dans ce sujet à l'eflort statique. Pour la mesure de la force de contact, on choisit d'utiliser une jauge d'extensométrie qui permet une mesure indirecte de la force de contact. Cette jauge est un film plastique sur lequel se trouve un circuit résistif ; elle est solidement collée sur une pièce pour suivre ses déformations. Q28. Expliquer comment ce capteur peut mesurer un effort ? En particulier, quel est le corps d'épreuve et la grandeur de sortie de ce capteur ? On se propose dans cette sous--partie d'établir le lien entre l'effort FC sur la caténaire et le couple Cm transmis par le coussin pneumatique, puis de choisir le meilleur emplacement pour la jauge d'extensométrie. La modélisation du pantographe est donnée figure 12. Données: ÎC=axî C_G£=bï OE= --cxî+dïj OE=exî OE=î-- 1 2 1 ÈT5=fxî a=(X_oï>î)
B= XÎÆ)
y=(XËË)
m1 = 100kg
m2 =70kg
Figure 12 -- Schéma cinématique du pantographe
11/20
Le torseur en un point M de l'action mécanique du solide i sur le solide j sera
noté :
{T...-} = Yij Mii
ZiÏ NÜ M,RO
Hypothèses
- On néglige le frottement de la caténaire sur l'archet.
- On néglige la masse de toutes les pièces sauf le bras inférieur ] et le bras
supérieur 2. Les centres
de masse des solides 1 (masse m1) et 2 (masse m2) sont les points G1 et G2.
-- Le champ de pesanteur est tel que ÿ = --g% avec g = 9,81 m.s'2.
- On considère ici le pantographe en équilibre statique.
On donne ci--dessous les torseurs des actions mécaniques extérieures :
0 0 0 0
{T4-->2} : {_FC 0} {Tmoteur-->1} : {O 0 } -
0 0 ...) 0 c... AR
Q29. Reproduire et compléter le graphe de structure du système de la figure 13.
On ra elle ue le
PP q
graphe de structure permet de représenter les solides, les liaisons et les
actions mécaniques.
O--O
Figure 13 -- Graphe de structure du pantographe
Le problème sera, pour la suite, considéré comme plan.
Q30. En isolant la pièce 3, déterminer l'expression simplifiée au point D dans
la base (Î , fi, zÎ)du
torseur {T2_,3}.
Q31. En isolant la pièce 2, montrer que la composante sur x_3) de la résultante
du torseur {T3_,2}
s'exprime par l'équation (3) :
cos B (bm2g + eFC)
X32 : _ csin(y -- B) + d cos(y -- B)
(?>)
Q32. Sans résoudre les équations, donner l'isolement, le bilan des actions
mécaniques extérieures et le
théorème à appliquer pour aboutir à la relation liant le couple C..., à la
force de contact FC , qui est
de la forme
Cm=X.FC+Y.mZg+Z.m1g (4)
où X, Y et Z sont des paramètres dépendants des données de l'énoncé.
12/20
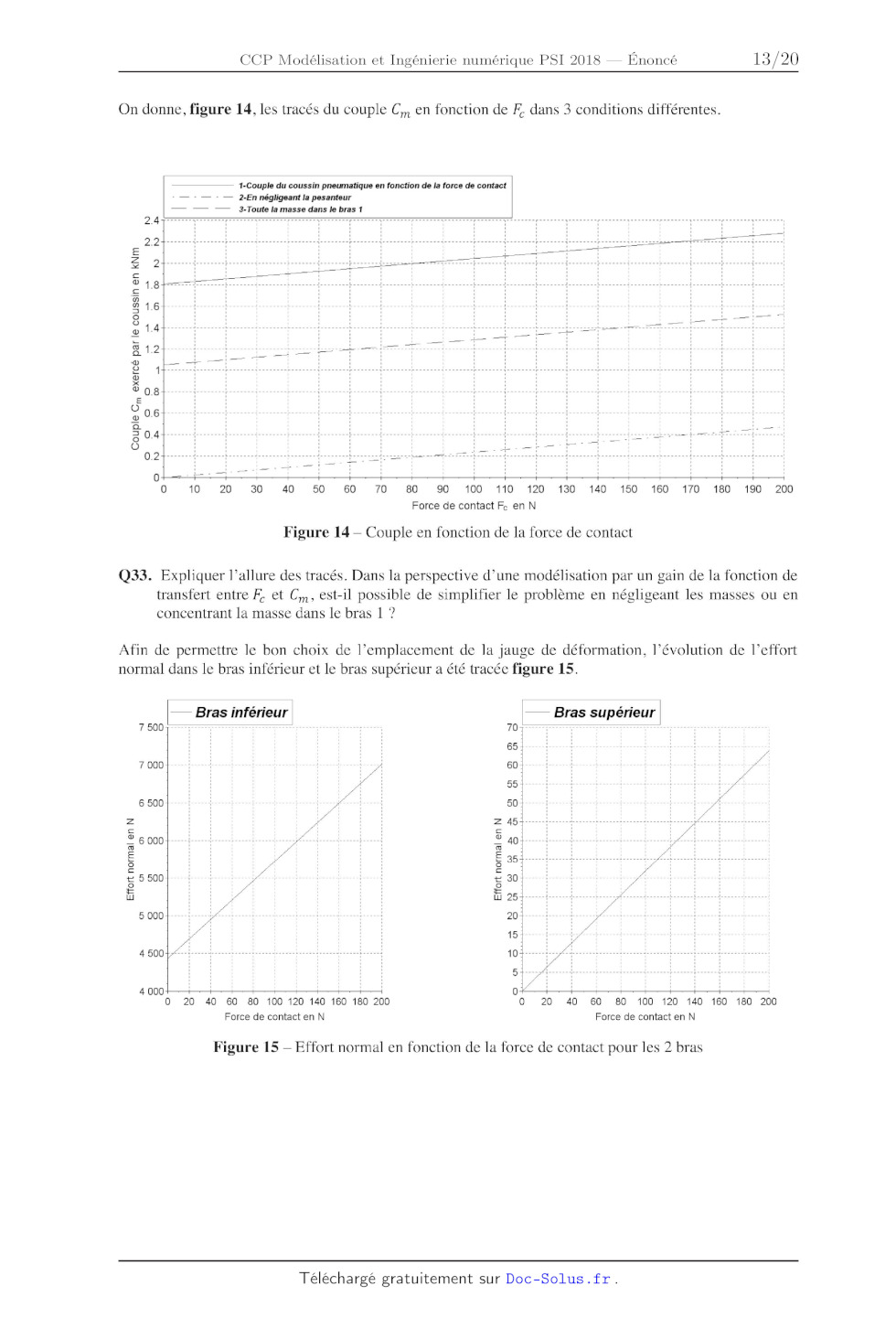
On donne, figure 14, les tracés du couple C... en fonction de FC dans 3
conditions différentes.
1-Couple du coussin pneumatiqu en fonction de la force de contact
----- -- 2-En négligeant la pesanteur
_ _ * 3-Toute la masse dans le bras 1
NN
roro->
_\_\_\
4>07oe
Couple Cm exercé par le coussin en kNm
.0 .0 .0 .0 --*
M -l> O') 00 _\ l\)
O
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Force de contact Fc en N
Figure 14 -- Couple en fonction de la force de contact
Q33. Expliquer l'allure des tracés. Dans la perspective d'une modélisation par
un gain de la fonction de
transfert entre FC et Cm, est--il possible de simplifier le problème en
négligeant les masses ou en
concentrant la masse dans le bras 1 ?
Afin de permettre le bon choix de l'emplacement de la jauge de déformation,
l'évolution de l'effort
normal dans le bras inférieur et le bras supérieur a été tracée figure 15.
-- Bras inférieur -- Bras supérieur
7500"""Ï """ 1 """ ."""Î """ 1 """ 1'""". """ 1 """ Ï"""1 1 1 1 1 1
7 000-
6 500*
6 000--
5 500-
Efi'ort normal en N
Effort normal en N
5 000-
4 500-
4 000
0 20 40 60 80 100120140160180200 0 20 40 60 80 100 120 140 160 180 200
Force de contact en N Force de contact en N
Figure 15 -- Effort normal en fonction de la force de contact pour les 2 bras
13/20
Q34. À l'aide des courbes des figures 14 et 15, donner les avantages et
inconvénients du placement de
la jauge sur les 2 bras. Pour cela, calculer la sensibilité du capteur dans
chaque cas.
111.2 -- Cahier des charges de l'asservissement de l'effort sur la caténaire
Nous sommes maintenant en mesure de connaître la force de contact sur la
caténaire. On souhaite
maintenir cette force autour d'une valeur moyenne. Le document 1 est un extrait
des recommandations
SAM E 903 de l'Etablissement Public de la Sécurité Ferroviaire (EPSF)
concernant les limites
acceptables de la force de contact de l'archet sur la caténaire.
La force moyenne de contact doit rester dans la plage [ F cm..., F c,,...].
La force moyenne minimale de contact doit respecter la formule suivante :
FC...... 2 0,00047*V2 +60 N.
La force moyenne maximale de contact doit respecter les formules suivantes :
V 5 200 km/h : F cn... S 0,00047*V2 + 90 N ;
V > 200 km/h : F c,... S 0,00097*V2 + 70 N .
Document 1 -- Recommandations de l'EPSF en matière de force de contact
\
A partir des équations des recommandations de l'EPSF du document 1, on définit
la valeur
moyenne F cmoy de la force de contact telle que représentée sur la figure 16.
jbrcc de contact
F c
' "! [IX
Plage de 5( %
F c
' may
F (?
min
Figure 16 -- Plage de maintien de la force
Q35. Déterminer l'équation de la valeur moyenne F en...), de la force de
contact en fonction de la vitesse
V du train pour les deux plages de vitesse définies dans le document 1.
On souhaite que l'asservissement de la force de contact maintienne cette
dernière le plus proche possible
de F cmoy. Les variations de FC doivent être limitées à une plage de 50 %
autour de F Cm0y pour garder
une marge d'erreur suffisante par rapport aux valeurs extrêmes F cmax et F
C...... comme illustré dans la
figure 16.
- Plage 0
On pose l'erreur relative : e% : _5°/°_
choy
Q36. À partir des équations de la Q35, exprimer l'erreur relative pour les deux
plages de vitesse en
fonction de V.
Q37. Pour quelle valeur de la vitesse du train l'erreur relative 63% est--elle
la plus faible ?
En déduire la valeur maximale de l'erreur statique relative admissible dans
l'asservissement de la
force de contact.
14/20
Pour la suite, on prendra une erreur statique relative maximale de 8 %.
Sous l'effet de la gravité illustré figure 17, le fil de contact
FC décrit une courbe appelée chaînette dont la flèche varie en
fonction de la masse linéique et de la longueur séparant les
deux poteaux supports.
"'._'}_.( .
Pour réduire cette flèche, une tension mécanique est
appliquée à chacune des extrémités du fil. Néanmoins, les
propriétés du matériau ne permettent pas de compenser la
flèche par la seule application d'une tension mécanique aux
extrémités du fil.
Figure 17 -- Chaînette du fil de
contact sur un tronçon
Lorsque la vitesse du train dépasse 100 km/h, pour assurer une
bonne qualité de captage, le fil de contact doit être presque
horizontal afin de minimiser les déplacements du pantographe.
Q38. Quel problème va poser cette flèche du fil de contact pour
l'asservissement de la force de
contact ?
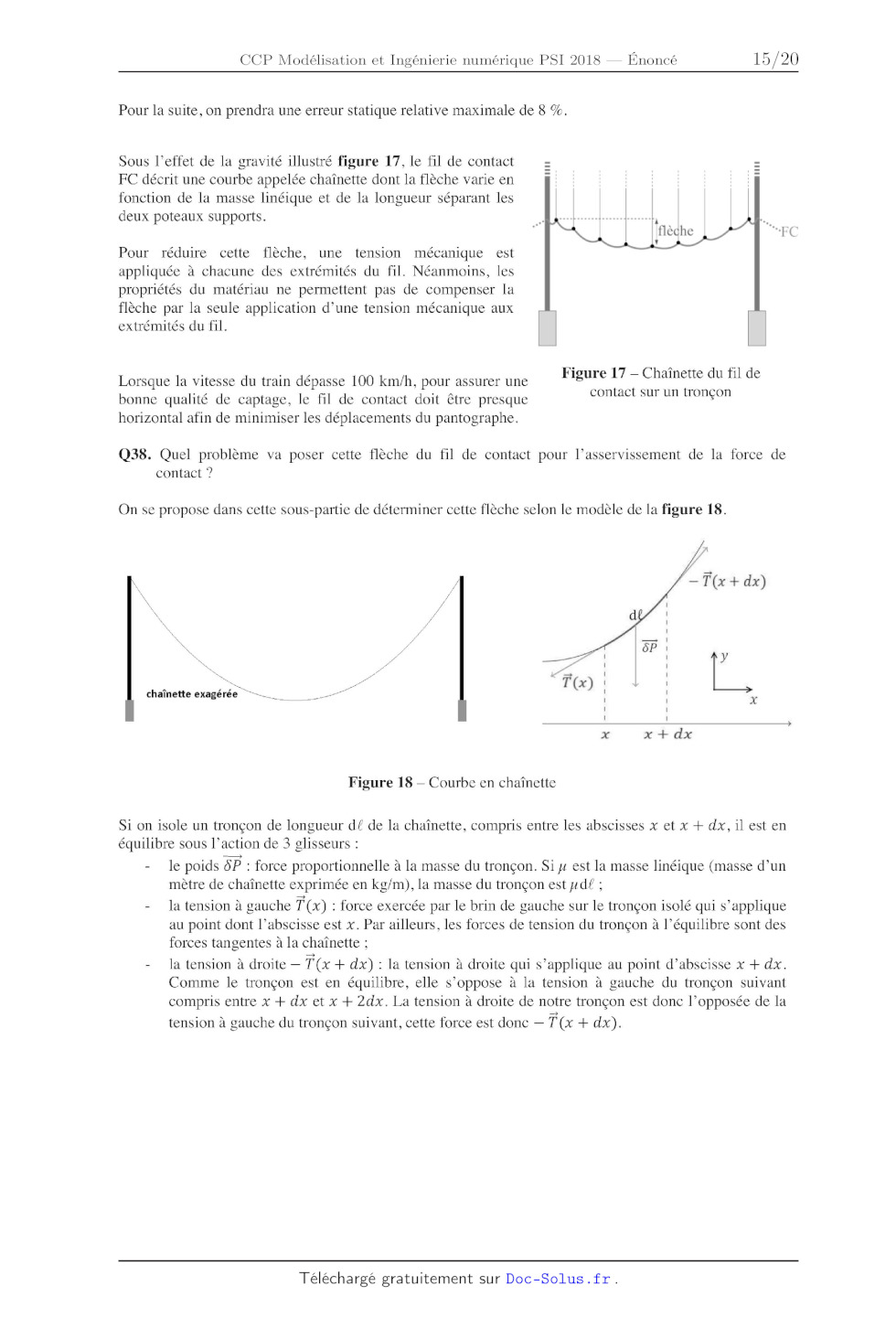
On se propose dans cette sous--partie de déterminer cette flèche selon le
modèle de la figure 18.
-- Î'(x + dx)
"%(x)
chaînette exagérée
r!
x x+dx
Figure 18 -- Courbe en chaînette
Si on isole un tronçon de longueur d£ de la chaînette, compris entre les
abscisses x et x + dx, il est en
équilibre sous l'action de 3 glisseurs :
-- le poids ËÎ' : force proportionnelle à la masse du tronçon. Si pt est la
masse linéique (masse d'un
mètre de chaînette exprimée en kg/m), la masse du tronçon est ydEUR ;
-- la tension à gauche f(x) : force exercée par le brin de gauche sur le
tronçon isolé qui s'applique
au point dont l'abscisse est x. Par ailleurs, les forces de tension du tronçon
à l'équilibre sont des
forces tangentes àla chaînette ;
-- la tension à droite -- ï(x + dx) : la tension à droite qui s'applique au
point d'abscisse x + dx.
Comme le tronçon est en équilibre, elle s'oppose à la tension à gauche du
tronçon suivant
compris entre x + dx et x + 2dx. La tension à droite de notre tronçon est donc
l'opposée de la
tension à gauche du tronçon suivant, cette force est donc -- ï(x + dx).
15/20
Q39. En appliquant le Principe Fondamental de la Statique au tronçon isolé,
puis en projetant sur 55 et ÿ,
établir les deux équations suivantes
{Th(x + dx) -- Th(x) = 0
Tv(X+dx) --Tv(x) --5P : 0 (5)
avec Th et Tu les valeurs absolues des composantes horizontales et verticales
de la tension.
Q40. En déduire que la tension horizontale Th est constante.
Nous noterons y(x) l'équation de la chaînette.
Q41. En considérant que chaque tronçon infinitésimal de la chaînette est
rectiligne (figure 19),
démontrer la relation suivante :
d£_ dy 2 _
a* "(a) @
Y(X) '
/' /
dQ" dy
* / dx
Figure 19 -- Approximation d'ordre 1
Q42. En exploitant les résultats des questions Q39 et Q41, montrer que
T'v(X) = My 1 + (Y'(X))2 (7)
avec T'v(x) et y'(x) les dérivées par rapport à xde Tv (x) et y(x).
On admet que T,, (x) = Th (x). y'(x).
Rappel
On admet que smh admet une bijection rec1proque notee arcsmh dont la der1vee
est @ .
43. En ex loitant le ra el ci--dessus et les résultats démontrés Q42,
déterminer l'ex ression de
P PP P
y"(x). Montrer alors que l'équation de la chaînette s'écrit
3/05) = a cosh (â + a) + B (8)
avec a et B , les constantes d'intégration et a un paramètre à expliciter.
Ainsi, pour une distance entre 2 poteaux de 60 m, avec une tension de 20 kN, on
trouve par application
numérique une flèche de l'ordre de 5,4 cm. La flèche reste relativement faible,
de l'ordre d' l/ 1000 d'un
tronçon, mais va générer une perturbation du point de vue de l'asservissement.
16/20
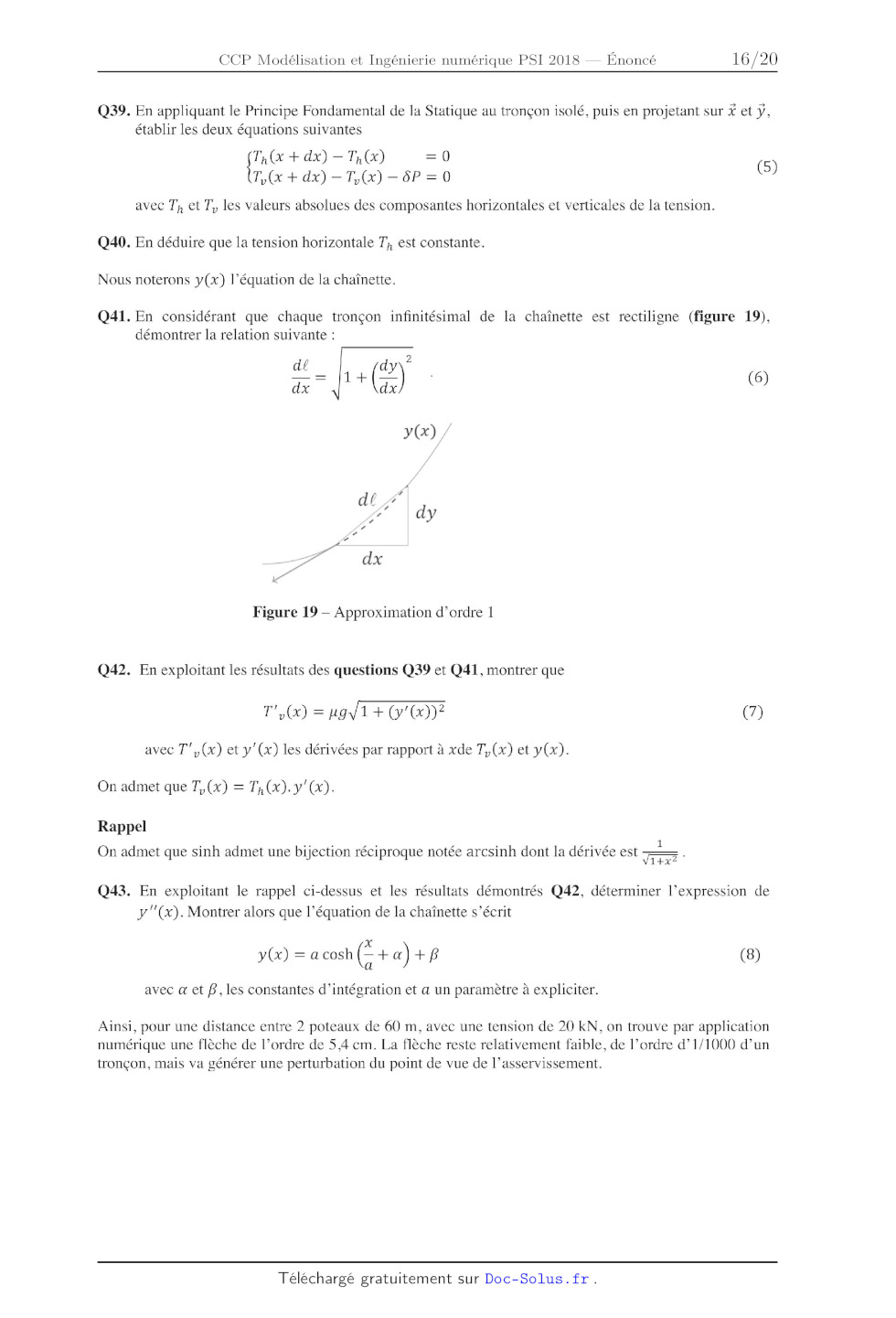
Des simulations de la force de contact, filtrée à 20 Hz, pour un train
circulant à 90 km/h et 320 km/h
sont données dans une configuration le long de 5 tronçons (figure 20). Les
passages sur les poteaux sont
représentés avec les lignes verticales pointillées.
200
230
| | | |
,; b il | |
... | '|\ ||,||,||
'J 5 . , ' |
' - l | :
% Ë , l | ' | | 1 || |
5 u un ; H ' 5
mo ! E
H .'>U |...) L')" L'...) 250 0 50 H... |.'|ll L'...) 254!
Position lml Position [ml
Figure 20 -- Forces de contact pour un train circulant à 90 km/h (à gauche) et
320 km/h (à droite)
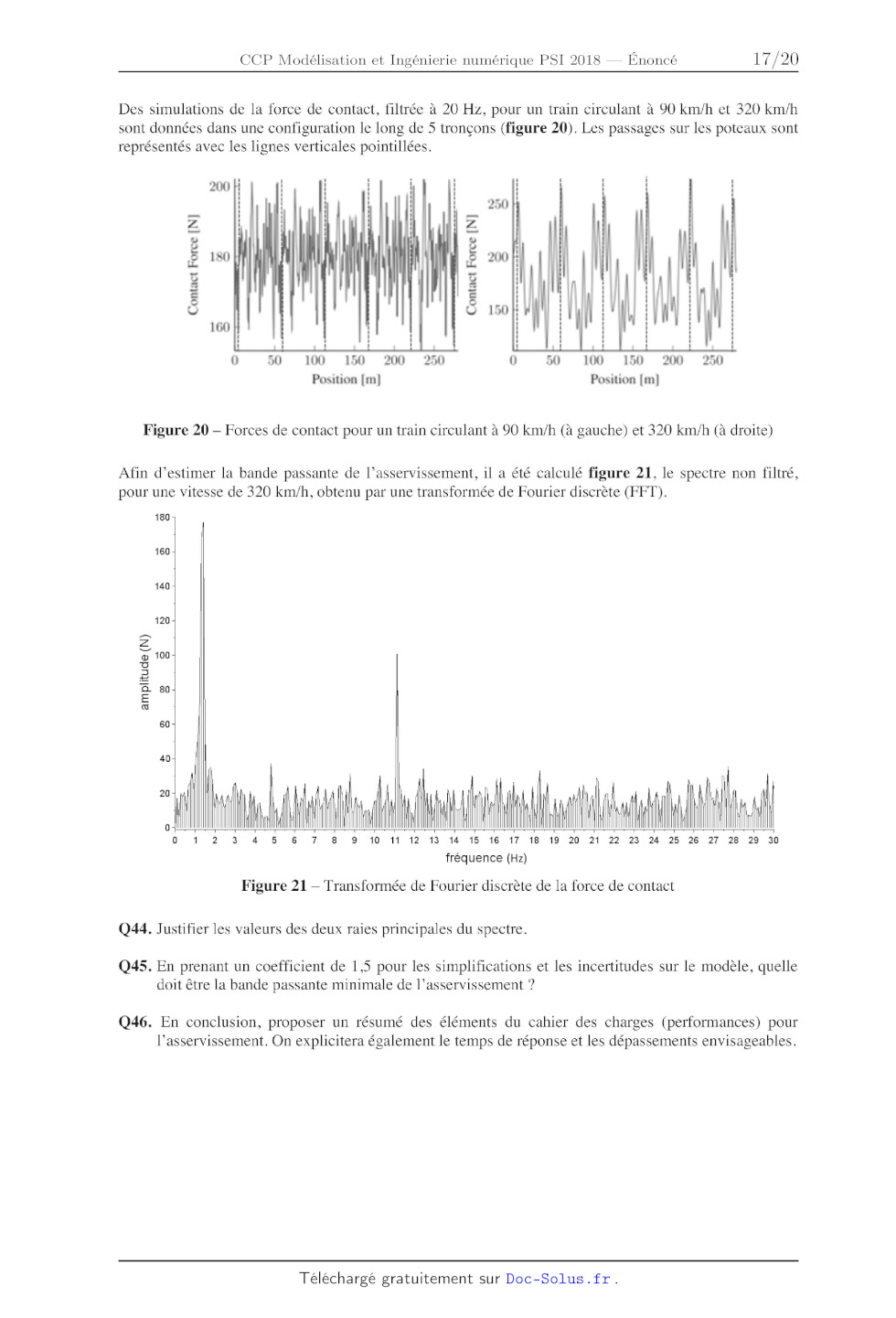
Afin d'estimer la bande passante de l'asservissement, il a été calculé figure
21, le spectre non filtré,
pour une vitesse de 320 km/h, obtenu par une transformée de Fourier discrète
(FFT).
180-
160--
140--
120--
amplitude (N)
@ â
05
O
|
.>
o
|
Î|l
0
| | 1 | | | | | | f | 1 | | Y | | 1 l | | Y | l \ | \ |
12 3 4 5 s 7 a 910111213141516171819 20 2122 23 24 252627 28 29 sa
fréquence (Hz)
Figure 21 -- Transformée de Fourier discrète de la force de contact
Q44. Justifier les valeurs des deux raies principales du spectre.
Q45. En prenant un coefficient de 1,5 pour les simplifications et les
incertitudes sur le modèle, quelle
doit être la bande passante minimale de l'asservissement '?
Q46. En conclusion, proposer un résumé des éléments du cahier des charges
(performances) pour
l'asservissement. On explicitera également le temps de réponse et les
dépassements envisageables.
17/20
III.3 -- Asservissement de l'effort sur la caténaire
Objectif : vérifier les performances attendues de l'asservissement.
On souhaite maintenant mettre en place l'asservissement afin de maintenir la
force de contact de l'archet
sur la caténaire la plus proche possible de la valeur moyenne. La force de
contact souhaitée FC,
proportionnelle à la vitesse, est déterminée par le calculateur. De plus comme
nous venons de le voir, la
variation de hauteur du fil de contact de la caténaire entraîne une
perturbation sur l'asservissement de la
force de contact.
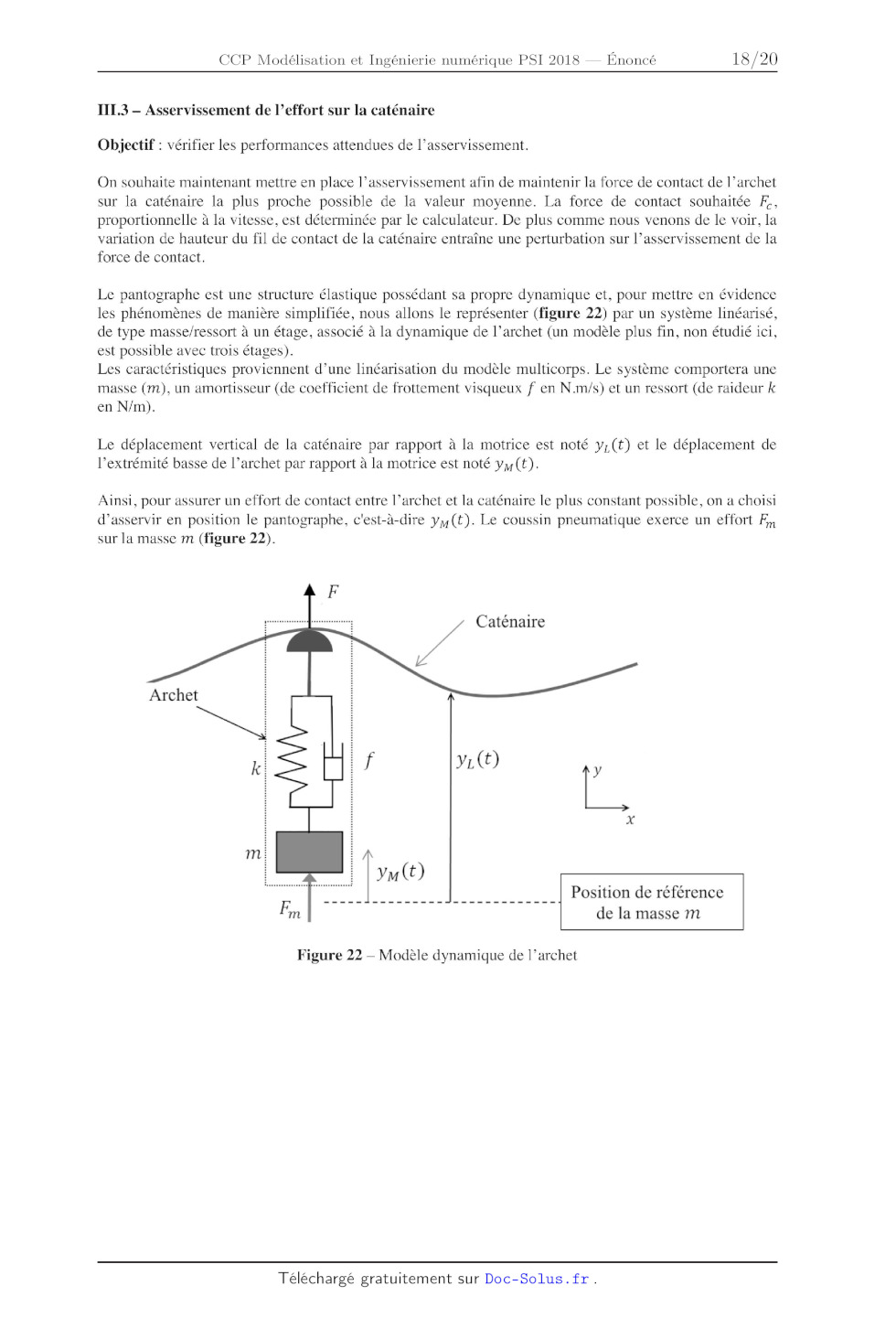
Le pantographe est une structure élastique possédant sa propre dynamique et,
pour mettre en évidence
les phénomènes de manière simplifiée, nous allons le représenter (figure 22)
par un système linéarisé,
de type masse/ressort à un étage, associé à la dynamique de l'archet (un modèle
plus fin, non étudié ici,
est possible avec trois étages).
Les caractéristiques proviennent d'une linéarisation du modèle multicorps. Le
système comportera une
masse (m), un amortisseur (de coefficient de frottement visqueux f en N.m/s) et
un ressort (de raideur k
en N/m).
Le déplacement vertical de la caténaire par rapport à la motrice est noté yL
(t) et le déplacement de
l'extrémité basse de l'archet par rapport à la motrice est noté yM (t).
Ainsi, pour assurer un effort de contact entre l'archet et la caténaire le plus
constant possible, on a choisi
d'asservir en position le pantographe, c'est--à--dire yM (t). Le coussin
pneumatique exerce un effort F...
sur la masse m (figure 22).
% ................................ : / Caténaire
Archet
.,Ë f mo
L
X
YM @)
Position de référence
de la masse m
Figure 22 -- Modèle dynamique de l'archet
18/20
On notera F la force qu'exerce l'archet sur la caténaire et qui sera comptée
positive vers le haut.
On notera FC l'effort de contact de consigne. L'archet est instrumenté et
dispose d'un capteur d'effort
mesurant l'effort de contact F .
L'action de l'actionneur Fm sur la masse est telle que F... (p) = HC (p)C(p).
(FC (10) -- F (p)).
Q47. Expliquer pourquoi la variation de hauteur de la caténaire fait varier
l'effort de contact F .
L'équation différentielle qui régit le mouvement du pantographe autour de sa
position d'équilibre est la
suivante :
m-ÿM(t) = --k(yM(t) -- n(t)) -- f (y'M(t) -- y'L(t)) + F...(t) . (9)
On pose YM (p), YL (p), Fm (p) les transformées de Laplace de yM (t), yL (t) et
Fm (t).
Q48. Passer cette équation dans le domaine de Laplace en supposant les
conditions initiales nulles.
Q49. Exprimer YM (p)sous la forme YM (p) = B(p). (A(p) YL (p) + Fm (p)).
Expliciter les termes A(p) et
B(p)-
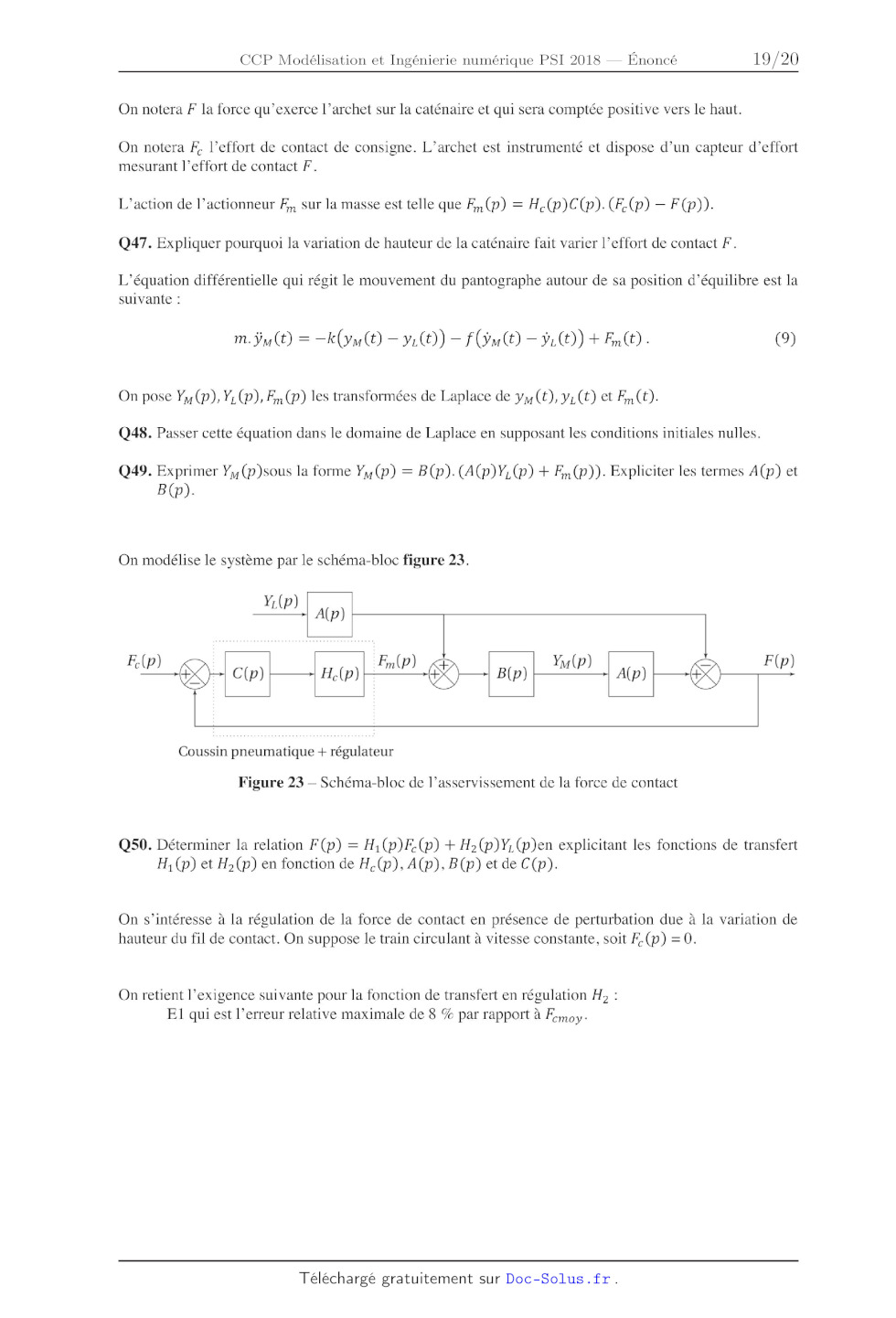
On modélise le système par le schéma--bloc figure 23.
YL(P) A(p)
FC F... | Y \ F
& ®--E[ ®E [W
Coussin pneumatique + régulateur
Figure 23 -- Schéma--bloc de l'asservissement de la force de contact
Q50. Déterminer la relation F (p) = H1(p)Fc(p) + Hz (p)YL (p)en explicitant les
fonctions de transfert
H1(p) et H2 (10) en fonction de Hc(p), A(p), B(p) et de C(p).
On s'intéresse à la régulation de la force de contact en présence de
perturbation due à la variation de
hauteur du fil de contact. On suppose le train circulant à vitesse constante,
soit Fc(p) : 0.
On retient l'exigence suivante pour la fonction de transfert en régulation H 2 :
El qui est l'erreur relative maximale de 8 % par rapport à choy.
19/20
La tracé du diagramme de Bode de la fonction de transfert en régulation,
corrigée, Hz (p) a permis de
relever les valeurs de gain données dans le tableau 2.
Fréquence (Hz) 1 10
2010g(|H2|)(dB) 42 49
Tableau 2 -- Relevé de valeurs de gain
QS]. À 320 km/h, on peut modéliser yL (t) par une sinusoïde d'amplitude 6 cm à
la fréquence de le.
En déduire l'influence maximale de la perturbation due à la variation de niveau
de la caténaire sur
la force de contact.
Q52. Conclure quant àla capacité de l'asservissement à respecter l'exigence El.
FIN
20/20
[M P R1MER1E NA T] () NA L E -- 181063 -- D'après documents fournis