
Centrale Physique 2 PC 2020
| Thème de l'épreuve | Du neuf dans les sillages |
| Principaux outils utilisés | mécanique des fluides, mécanique du point, incertitudes de mesures, bilan énergétique, optique géométrique, optique physique, acoustique |
| Mots clefs | vague, équation d'Euler, onde de choc |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)

Énoncé obtenu par reconnaissance optique des caractères
Physique 2
v
PC
CONCOURS CENTRALE-SUPÉLEC 4 heures Calculatrice autorisée
2020
Du neuf dans les sillages
Étudiées depuis la fin du xix° siècle par Frédéric Reech, William Froude et
William Thomson (Lord Kelvin).
les ondes à la surface de l'eau sont souvent citées en exemples lors de
l'évocation des ondes : plus visuelles que
les ondes acoustiques ou électromagnétiques, elles n'en sont pas moins plus
complexes à étudier !
Générées par le vent, elles provoquent la houle, dont l'étude est aujourd'hui
très importante : prévention des
risques sur les littoraux, utilisation de l'énergie houlomotrice, etc. Générées
par des bateaux, elles sont nuisibles,
car elles sont à l'origine de l'érosion importante des berges, et elles
provoquent une résistance à l'avancement.
Ce sujet étudie la forme des sillages à la surface de l'eau provoqués par des
objets en déplacement. Il s'intéresse
notamment à une découverte récente à propos de ce phénomène qui a un temps
remis en cause les bases fondées
par lord Kelvin voici 150 ans. Cette découverte est rapportée dans un article
paru dans Reflets de la Physique en
2013, cosigné par Marc Rabaud et Frédéric Moisy, dont les deux tiers sont
joints en annexe 1. En annexe 2, on
trouve des données techniques relatives aux satellites SPOT 6 et 7 issues de
brochures de l'industriel Astrium.
Les constantes physiques utiles au problème, des définitions d'unités hors
système international et un formulaire
mathématique figurent en fin d'énoncé.
Les trois parties peuvent être abordées indépendamment, mais il est conseillé
de les aborder dans l'ordre pour se
familiariser avec les résultats et de lire l'article en premier. Les résultats
mentionnés dans une question peuvent
être utilisés dans les questions suivantes, même s'ils n'ont pas été démontrés.
On note g l'accélération de la pesanteur à la surface de la Terre et les
vitesses sont mesurées dans le référentiel
terrestre. On supposera que les courants sont négligeables, de sorte que la
vitesse du bateau, supposée constante
et rectiligne, représente aussi bien la vitesse du bateau dans le référentiel
terrestre que la vitesse du bateau par
rapport à l'eau. On la note U dans le sens de déplacement du bateau que l'on
supposera dans toute l'épreuve
se déplacer selon un axe x, l'axe z étant dirigé dans le sens vertical
ascendant. On note L la longueur du
bateau et on supposera que c'est la seule caractéristique géométrique
importante du navire pour l'étude. Les
caractéristiques des ondes à la surface de l'eau sont bien capturées par
l'étude d'un nombre sans dimension, le
nombre de Reech-Froude (ou plus simplement Froude), défini par
Les vecteurs unitaires selon Ox, Oy, Oz sont notés ü,, ü,, ü,.
On considérera que l'eau et l'eau de mer ont les mêmes propriétés
physico-chimiques, notamment la même masse
volumique notée p.
Les résultats des applications numériques doivent être donnés avec un nombre de
chiffres significatifs adapté à
la précision des données et à la finalité des calculs : détermination d'un
ordre de grandeur ou d'une valeur aussi
précise que possible.
Figure 1 L'avancée d'un bateau forme un sillage sur le Crater Lake dans l'Orégon
Source : Wave pattern in lake, Jim Hicks, The Physics Teacher 55, 256 (2017)
Certaines questions, repérées par une barre en marge, ne sont pas guidées et
demandent de l'initiative de la
part du candidat. Les pistes de recherche doivent être consignées par le
candidat sur sa copie ; si elles sont
pertinentes, elles seront valorisées. Le barème tient compte du temps
nécessaire pour explorer ces pistes et
élaborer un raisonnement, il valorise ces questions de façon très significative.
2020-02-19 10:20:31 Page 1/10 TO) sv-\c-sa
I Analyse des données de sillages
Cette première partie, dont les différentes sous-parties sont relativement
indépendantes, cherche à estimer diffé-
rents ordres de grandeur intervenant dans la physique des sillages et dans la
mesure de leurs caractéristiques.
IA --- Généralités
Q 1. À partir de la définition du nombre de Froude expliquée dans l'annexe 1,
quelle est, en ordre de
grandeur, l'expression de la vitesse des ondes de gravité ayant une longueur
d'onde égale à L, la longueur du
bateau ?
Q 2. Démontrer l'expression de la vitesse en fin d'une chute libre de hauteur
ZL dans le champ de pesanteur.
Comparer cette expression à celle obtenue à la question précédente.
Q 3. Citer un autre nombre sans dimension utilisé en dynamique des fluides, en
rappelant son nom, sa
définition, ainsi que les effets qu'il compare.
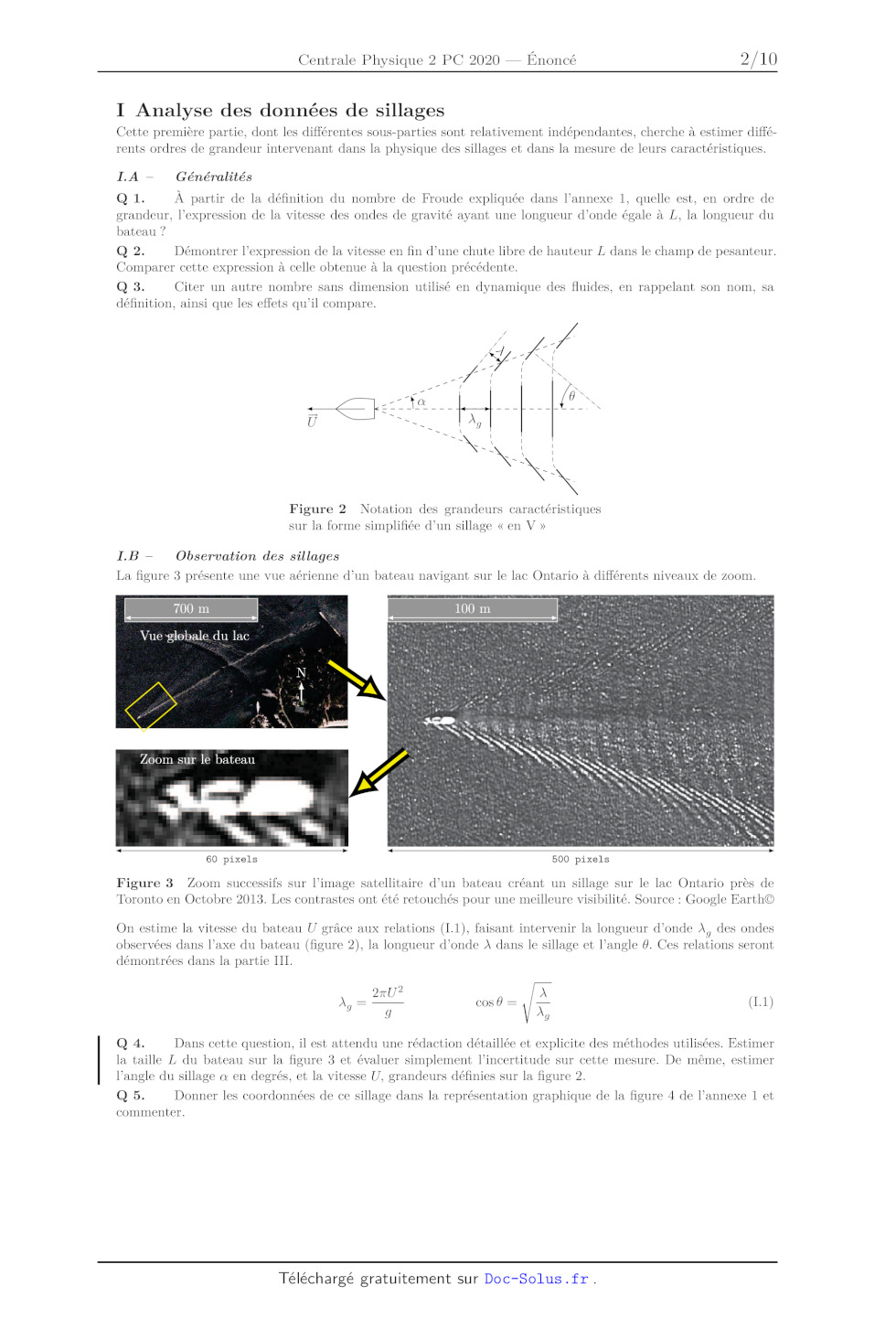
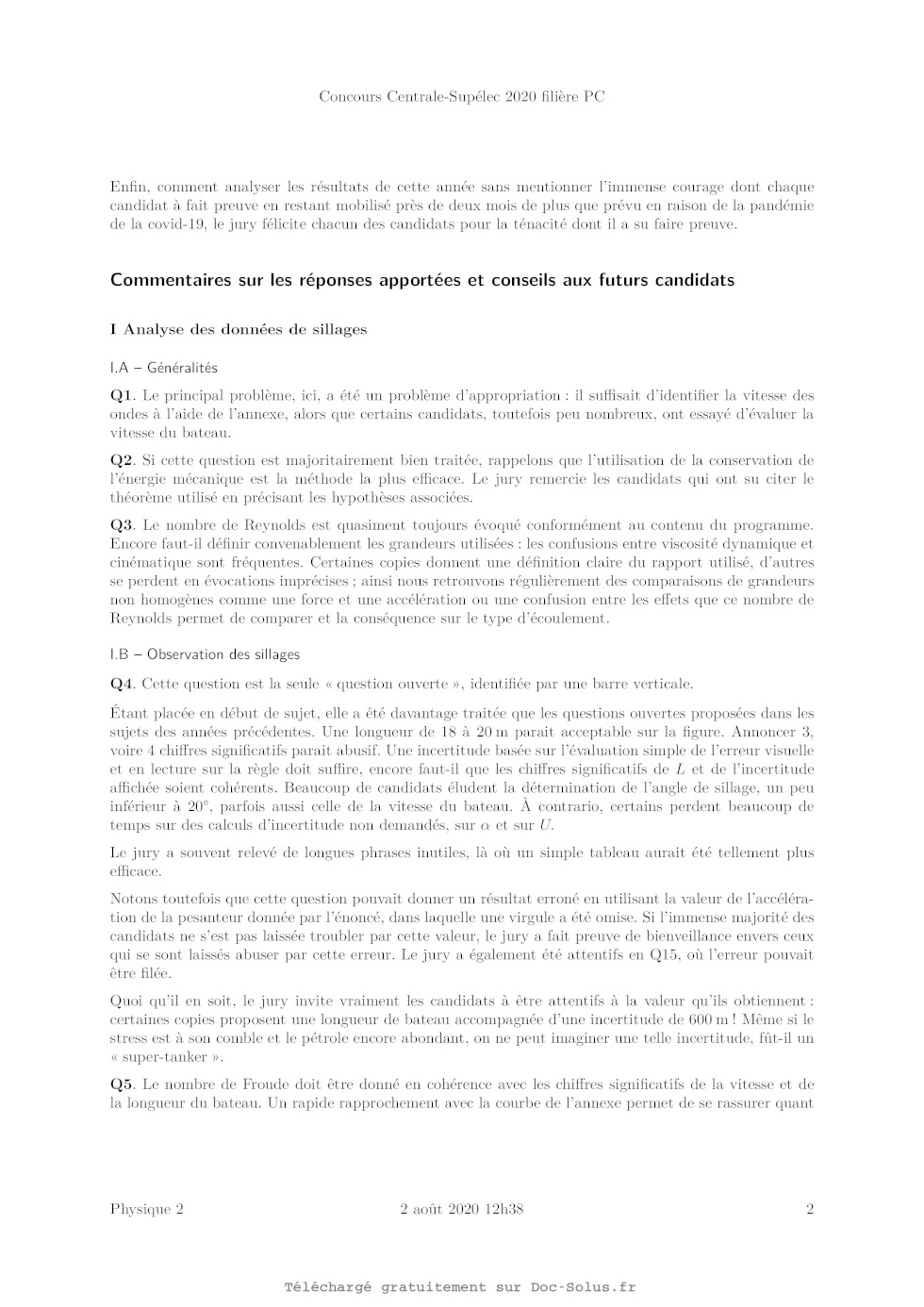
Figure 2 Notation des grandeurs caractéristiques
sur la forme simplifiée d'un sillage «en V »
I.B --- Observation des sillages
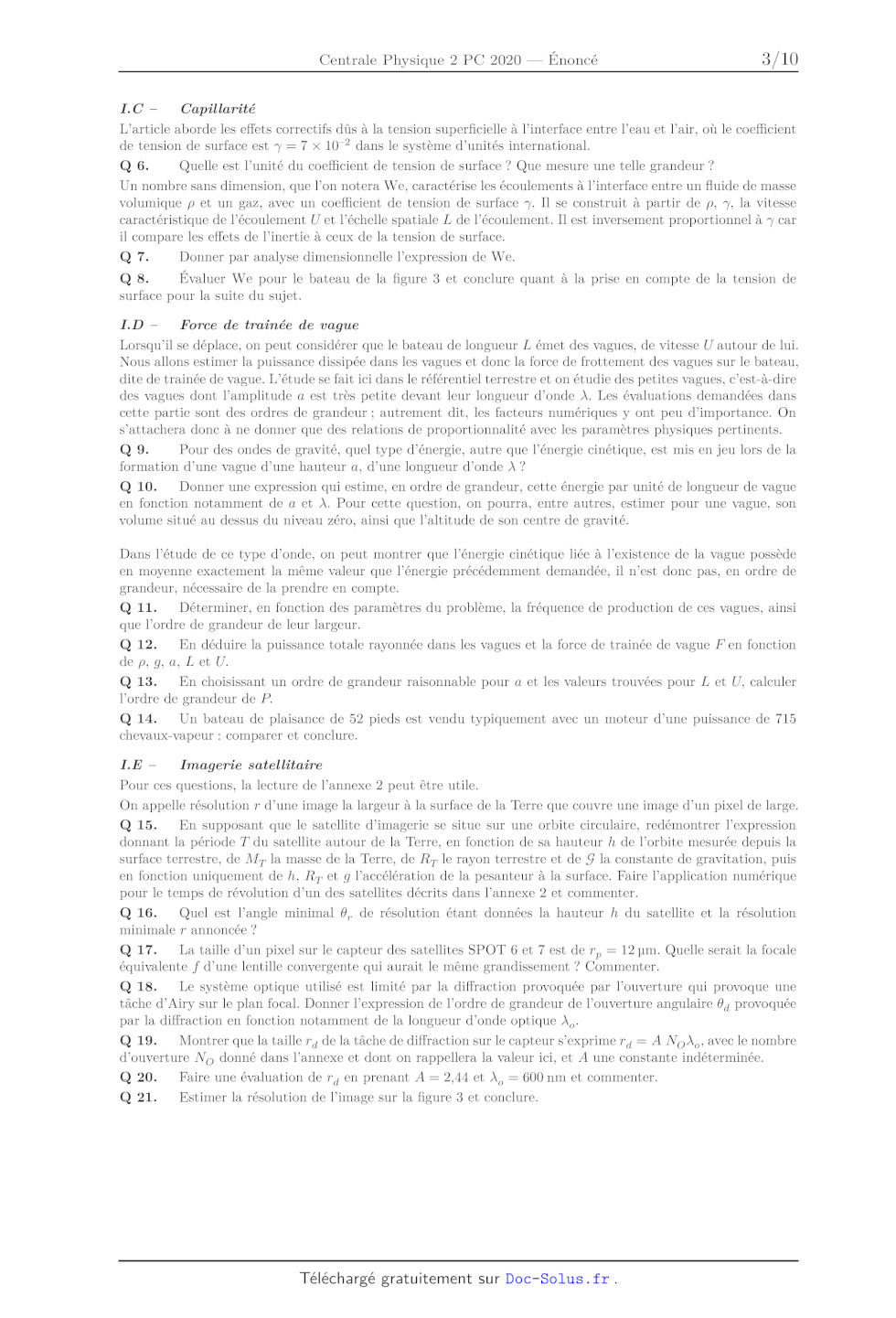
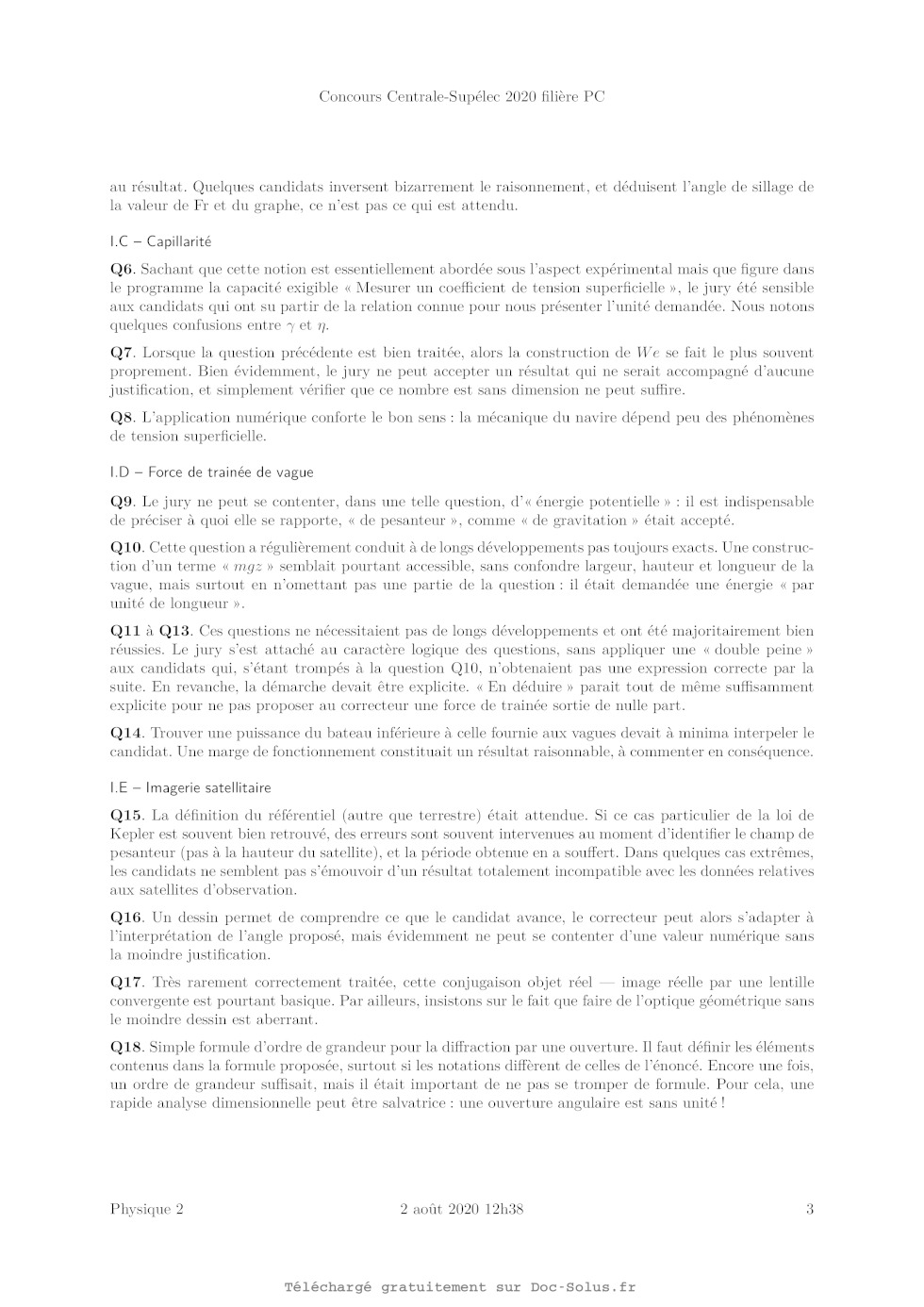
La figure 3 présente une vue aérienne d'un bateau navigant sur le lac Ontario à
différents niveaux de zoom.
Vuc-glebale du lac
PORN Ron AT
60 pixels 500 pixels
Figure 3 Zoom successifs sur l'image satellitaire d'un bateau créant un sillage
sur le lac Ontario près de
Toronto en Octobre 2013. Les contrastes ont été retouchés pour une meilleure
visibilité. Source : Google Earth©
On estime la vitesse du bateau U grâce aux relations (I.1), faisant intervenir
la longueur d'onde À, des ondes
observées dans l'axe du bateau (figure 2), la longueur d'onde À dans le sillage
et l'angle 9. Ces relations seront
démontrées dans la partie IIT.
27rU° À
À, = cos 0 = {| -- (I.1)
g À,
Q 4. Dans cette question, il est attendu une rédaction détaillée et explicite
des méthodes utilisées. Estimer
la taille Z du bateau sur la figure 3 et évaluer simplement l'incertitude sur
cette mesure. De même, estimer
l'angle du sillage «& en degrés, et la vitesse U, grandeurs définies sur la
figure 2.
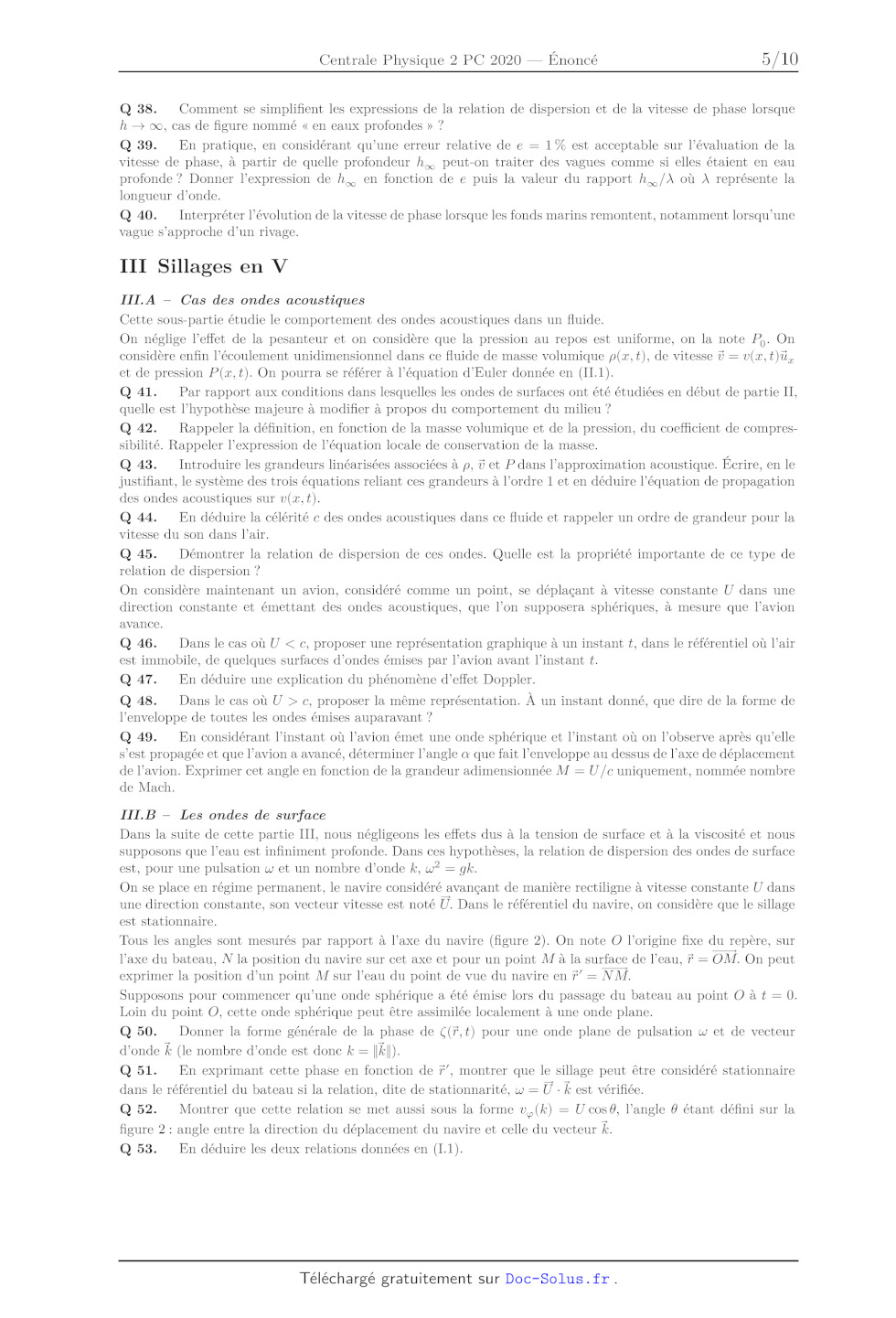
Q 5. Donner les coordonnées de ce sillage dans la représentation graphique de
la figure 4 de l'annexe 1 et
commenter.
2020-02-19 10:20:31 Page 2/10 FO) ey-Nc-sA
IC --- Capillarité
L'article aborde les effets correctifs dûs à la tension superficielle à
l'interface entre l'eau et l'air, où le coefficient
de tension de surface est + = 7 x 10 * dans le système d'unités international.
Q 6. Quelle est l'unité du coefficient de tension de surface ? Que mesure une
telle grandeur ?
Un nombre sans dimension, que l'on notera We, caractérise les écoulements à
l'interface entre un fluide de masse
volumique p et un gaz, avec un cocfficient de tension de surface 7. Il se
construit à partir de p, 7, la vitesse
caractéristique de l'écoulement Ù et l'échelle spatiale L de l'écoulement. IT
est inversement proportionnel à 7 car
il compare les effets de l'inertie à ceux de la tension de surface.
Q 7. Donner par analyse dimensionnelle l'expression de We.
Q 8. Évaluer We pour le bateau de la figure 3 et conclure quant à la prise en
compte de la tension de
surface pour la suite du sujet.
I.D -- Force de trainée de vague
Lorsqu'il se déplace, on peut considérer que le bateau de longueur L émet des
vagues, de vitesse U autour de lui.
Nous allons estimer la puissance dissipée dans les vagues et donc la force de
frottement des vagues sur le bateau,
dite de trainée de vague. L'étude se fait ici dans le référentiel terrestre et
on étudie des petites vagues, c'est-à-dire
des vagues dont l'amplitude a est très petite devant leur longueur d'onde À.
Les évaluations demandées dans
cette partie sont des ordres de grandeur ; autrement dit, les facteurs
numériques y ont peu d'importance. On
s'attachcra donc à ne donner que des relations de proportionnalité avec les
paramètres physiques pertinents.
Q 9. Pour des ondes de gravité, quel type d'énergie, autre que l'énergie
cinétique, est mis en jeu lors de la
formation d'une vague d'une hauteur a, d'une longueur d'onde À ?
Q 10. Donner une expression qui estime, en ordre de grandeur, cette énergie par
unité de longueur de vague
en fonction notamment de a et À. Pour cette question, on pourra, entre autres,
estimer pour une vague, son
volume situé au dessus du niveau zéro, ainsi que l'altitude de son centre de
gravité.
Dans l'étude de ce type d'onde, on peut montrer que l'énergie cinétique liée à
l'existence de la vague possède
en moyenne exactement la même valeur que l'énergie précédemment demandée, il
n'est donc pas, en ordre de
grandeur, nécessaire de la prendre en compte.
Q 11. Déterminer, en fonction des paramètres du problème, la fréquence de
production de ces vagues, ainsi
que l'ordre de grandeur de leur largeur.
Q 12. En déduire la puissance totale rayonnée dans les vagues et la force de
trainée de vague F'en fonction
de p, g, a, Let U.
Q 13. En choisissant un ordre de grandeur raisonnable pour a et les valeurs
trouvées pour L et Ü, calculer
l'ordre de grandeur de P,.
Q 14. Un bateau de plaisance de 52 pieds est vendu typiquement avec un moteur
d'une puissance de 715
chevaux-vapeur : comparer et conclure.
IE -- Imagerie satellitaire
Pour ces questions, la lecture de l'annexe 2 peut être utile.
On appelle résolution r d'une image la largeur à la surface de la Terre que
couvre une image d'un pixel de large.
Q 15. En supposant que le satellite d'imagerie se situe sur une orbite
circulaire, redémontrer l'expression
donnant la période T' du satellite autour de la Terre, en fonction de sa
hauteur À de l'orbite mesurée depuis la
surface terrestre, de My la masse de la Terre, de À le rayon terrestre et de S
la constante de gravitation, puis
en fonction uniquement de h, R7 et g l'accélération de la pesanteur à la
surface. Faire l'application numérique
pour le temps de révolution d'un des satellites décrits dans l'annexe 2 et
commenter.
Q 16. Quel est l'angle minimal 0, de résolution étant données la hauteur À du
satellite et la résolution
minimale r annoncée ?
Q 17. La taille d'un pixel sur le capteur des satellites SPOT 6 et 7 est de r,,
-- 12 nm. Quelle serait la focale
équivalente f d'une lentille convergente qui aurait le même grandissement ?
Commenter.
Q 18. Le système optique utilisé est limité par la diffraction provoquée par
l'ouverture qui provoque une
tâche d'Airy sur le plan focal. Donner l'expression de l'ordre de grandeur de
l'ouverture angulaire 4, provoquée
par la diffraction en fonction notamment de la longueur d'onde optique À,
Q 19. Montrer que la taille r,, de la tâche de diffraction sur le capteur
s'exprime r, = À N, À, avec le nombre
d'ouverture N,, donné dans l'annexe et dont on rappellera la valeur ici, et À
une constante indéterminée.
Q 20. Faire une évaluation de r,, en prenant À = 2,44 et À, -- 600 nm et
commenter.
Q 21. Estimer la résolution de l'image sur la figure 3 et conclure.
2020-02-19 10:20:31 Page 3/10 CERTES
IT Modèle hydrodynamique des ondes de surface
On étudie l'écoulement parfait d'un liquide incompressible et homogène de masse
volumique p, sous l'influence
de la pesanteur dont le champ est noté g = --gu..
On supposera que l'écoulement est bidimensionnel, avec un champ de vitesses de
la forme Y = v,(x,2,t)ü, +
v,(x,z2,t)u,. La pression dans le fluide est notée Pet celle dans l'air, à la
surface du fluide, est supposée uniforme
et constante et notée P,.. Le fond du fluide est supposé plat à l'altitude z =
--h (h > 0) et sa surface libre, en
l'absence d'ondes de surface, en z = 0. En présence d'ondes, l'altitude de la
surface libre est notée z = ((x,t)
et est supposée très petite devant la longueur d'onde, ce qui signifie entre
autres qu'évaluer une dérivée ou une
fonction en 2 = C(x,t) revient à l'évaluer en z = 0.
On rappelle l'équation d''Euler, décrivant l'écoulement du milieu fluide, dans
les hypothèses et notations précé-
dentes :
OÙ -- _,
pr + (ü grad) Ü = -- grad P + pq (IL.1)
Dans toute la suite, on linéarisera les équations en supposant que la présence
d'onde se réduit à une perturbation
par rapport à l'état d'équilibre. On pourra noter les développements sous la
forme ü = ü, et P = p, + p,, où
[U, | est très petit devant la célérité des ondes étudiées et p, & po.
IT. À --- Champ des vitesses
Q 22. Déterminer la forme de l'équation d'Euler à l'ordre le plus bas (vitesse
nulle).
Q 23. En déduire l'expression explicite de p,(z), que l'on supposera toujours
valide, même en présence
d'ondes.
Q 24. Quelle équation lie alors p, et ü, ?
L'étude d'ondes de surface se ramène à l'étude des forme harmoniques complexes
de pulsation w. On introduit
alors la vitesse complexe 0, -- ü, CE, z) exp(jwt), la pression complexe D = P,
z) exp(jwt), ainsi que l'alti-
tude complexe ((x,t) -- G 7) exp(jwt). Les grandeurs complexes associées vw, et
D, vérifient alors l'équation
précédemment trouvée.
Q 25. Quelle propriété de l'équation entre p, et Ü, permet de se restreindre à
l'étude des formes proposées ?
Q 26. Dans ces hypothèses, donner l'expression de %
10 © fonction de Pi p et w.
Q 27. En déduire que l'écoulement est irrotationnel et introduire le potentiel
des vitesses O(x, z,t).
Q 28. Montrer que le potentiel vérifie
A® = 0. (11.2)
Q 29. Dans quelles autres situations en physique rencontre-t-on ce type
d'équation ? Les décrire en quelques
lignes.
Q 30. Montrer qu'en z=--h,ona
09
Q 31. Pourquoi peut-on considérer que, Vx EUR | ---æ,+o, le gradient de 6 est
borné ?
On cherche les solutions de l'équation précédente sous la forme @ = f{(x)g(z)
exp(jut).
Q 32. Montrer que g(z) peut s'écrire g(z) = Acosh(k(z + h)), où k est une
constante.
Q 33. Déterminer complètement l'expression générale de © et donner une
interprétation pour la signification
de k.
Q 34. Commenter la forme de cette solution.
IT.B -- Relation de dispersion
0
Q 35. Montrer que la pression totale et le potentiel sont reliés par pee + P +
pgz = Constante. En déduire
qu'en z = Ç(x,t),
0' , 06
92 + Ta; = (. (IL.4)
Q 36. En déduire la relation de dispersion.
Q 37. Quelles sont les définitions et significations des vitesses de phase et
de groupe ? Donner l'expression
de la vitesse de phase en fonction de g, À et k.
2020-02-19 10:20:31 Page 4/10 C)EXETS
Q 38. Comment se simplifient les expressions de la relation de dispersion et de
la vitesse de phase lorsque
h -- ©, cas de figure nommé « en eaux profondes » ?
Q 39. En pratique, en considérant qu'une erreur relative de e = 1% est
acceptable sur l'évaluation de la
vitesse de phase, à partir de quelle profondeur h. peut-on traiter des vagues
comme si elles étaient en eau
profonde ? Donner l'expression de À en fonction de e puis la valeur du rapport
h,../À où À représente la
longueur d'onde.
Q 40. Interpréter l'évolution de la vitesse de phase lorsque les fonds marins
remontent, notamment lorsqu'une
vague s'approche d'un rivage.
IIT Sillages en V
TITI. A -- Cas des ondes acoustiques
Cette sous-partie étudie le comportement des ondes acoustiques dans un fluide.
On néglige l'effet de la pesanteur et on considère que la pression au repos est
uniforme, on la note F. On
considère enfin l'écoulement unidimensionnel dans ce fluide de masse volumique
p(x,t), de vitesse d = v(x,t)u.
et de pression P(x,t). On pourra se référer à l'équation d'Euler donnée en
(IL.1).
Q 41. Par rapport aux conditions dans lesquelles les ondes de surfaces ont été
étudiées en début de partie IT,
quelle est l'hypothèse majeure à modifier à propos du comportement du milieu ?
Q 42. Rappeler la définition, en fonction de la masse volumique et de la
pression, du coefficient de compres-
sibilité. Rappeler l'expression de l'équation locale de conservation de la
masse.
Q 43. Introduire les grandeurs linéarisées associées à 9, ü et P dans
l'approximation acoustique. Écrire, en le
justifiant, le système des trois équations reliant ces grandeurs à l'ordre 1 et
en déduire l'équation de propagation
des ondes acoustiques sur v(x,t).
Q 44. En déduire la célérité c des ondes acoustiques dans ce fluide et rappeler
un ordre de grandeur pour la
vitesse du son dans l'air.
Q 45. Démontrer la relation de dispersion de ces ondes. Quelle est la
propriété importante de ce type de
relation de dispersion ?
On considère maintenant un avion, considéré comme un point, se déplaçant à
vitesse constante U dans une
direction constante et émettant des ondes acoustiques, que l'on supposera
sphériques, à mesure que l'avion
avance.
Q 46. Dans le cas où U < EUR, proposer une représentation graphique à un instant {, dans le référentiel où l'air est immobile, de quelques surfaces d'ondes émises par l'avion avant l'instant t. Q 47. En déduire une explication du phénomène d'effet Doppler. Q 48. Dans le cas où U > c, proposer la même représentation. À un instant
donné. que dire de la forme de
l'enveloppe de toutes les ondes émises auparavant ?
Q 49. En considérant l'instant où l'avion émet une onde sphérique et l'instant
où on l'observe après qu'elle
s'est propagée et que l'avion a avancé, déterminer l'angle à que fait
l'enveloppe au dessus de l'axe de déplacement
de l'avion. Exprimer cet angle en fonction de la grandeur adimensionnée M = U
/c uniquement, nommée nombre
de Mach.
ITI.B -- Les ondes de surface
Dans la suite de cette partie IIT, nous négligeons les effets dus à la tension
de surface et à la viscosité et nous
supposons que l'eau est infiniment profonde. Dans ces hypothèses, la relation
de dispersion des ondes de surface
est, pour une pulsation w et un nombre d'onde k, w°? = gk.
On se place en régime permanent, le navire considéré avançant de manière
rectiligne à vitesse constante U dans
une direction constante, son vecteur vitesse est noté ÜU. Dans le référentiel
du navire, on considère que le sillage
est stationnaire.
Tous les angles sont mesurés par rapport à l'axe du navire (figure 2). On note
© l'origine fixe du repère, sur
l'axe du bateau, N la position du navire sur cet axe et pour un point M à la
surface de l'eau, r = OM. On peut
exprimer la position d'un point M sur l'eau du point de vue du navire en 7" =
NM.
Supposons pour commencer qu'une onde sphérique a été émise lors du passage du
bateau au point O à t = 0.
Loin du point ©, cette onde sphérique peut être assimilée localement à une onde
plane.
Q 50. Donner la forme générale de la phase de C(r,t) pour une onde plane de
pulsation w et de vecteur
d'onde # (le nombre d'onde est donc k = ||).
Q 51. En exprimant cette phase en fonction de 7", montrer que le sillage peut
être considéré stationnaire
dans le référentiel du bateau si la relation, dite de stationnarité, w -- U -k
est vérifiée.
Q 52. Montrer que cette relation se met aussi sous la forme v,,(k) -- Ü cos0,
l'angle 0 étant défini sur la
figure 2 : angle entre la direction du déplacement du navire et celle du
vecteur k.
Q 53. En déduire les deux relations données en (1.1).
2020-02-19 10:20:31 Page 5/10 CERTES
Q 54. Sur le graphique de la figure 4, réalisé à l'instant { dans le
référentiel où le fluide est immobile, on a représenté un point M situé \ |
dans une direction faisant un angle 0 avec la trajectoire du navire sur Me
la surface d'onde ayant été émise en © à l'instant & = 0. Reproduire le ANS
schéma sur la copie en plaçant avec précision le point V': position du AN,
navire à l'instant t. o[ \
Q 55. En déduire l'angle B, sous lequel le navire voit le point M par °0
rapport à l'axe du navire et depuis celui-ci, en fonction de 6. Figure 4
Lorsque le navire avance, de nombreuses pulsations sont émises à chaque
instant. Autrement dit, ce sont bien
des paquets d'onde qui sont émis par le passage du navire. Ainsi, pour un
paquet d'onde de nombre d'onde
principal k, on peut associer un angle a(k) selon lequel le paquet d'onde sera
visible depuis le navire.
Q 56. Déterminer la relation entre la vitesse de phase v,, et la vitesse de
groupe v,,.
Q 57. Sur le schéma précédent, représenter la position P du maximum du paquet
d'onde émis à l'instant
t = 0 depuis O et se propageant dans la direction faisant un angle 0 avec la
trajectoire du navire selon la
condition de stationnarité. Le point P est vu sous un angle à par rapport à
l'axe du navire et depuis celui-ci
(figure 2).
I
Q 58. Montrer la relation tan(5 -- a) -- 5 tan 6.
Q 59. En déduire l'expression explicite de « en fonction de f.
Q 60. Montrer, en introduisant y = tan a et x -- tan, que «a atteint un maximum
@,,, à déterminer
numériquement.
X
Q 61. Expliquer pourquoi le sillage est observé dans la direction à... On
pourra s'aider d'une analogie avec
un phénomène optique. Comparer avec les résultats cités dans l'article de
l'annexe 1.
Données
Vitesse de la lumière dans le vide c = 3,00 x 10$ ms !
Rayon moyen de la Terre Rr = 6,38 x 10° m
Accélération de la pesanteur à la latitude 45° à la surface de la Terre
g=98lmes À
Masse volumique de l'eau pure à 10 °C p = 1.00 x 10° kg-m *
Unités hors Système International
Nom Symbole Valeur
nu ft 0,3048 m
Cheval-vapeur (anglais) h 746 W
Formulaire
tanh(x) -- sinh(x) _ exp(x) -- exp(--x)
cosh(x) exp(x) + exp(--x)
1. 1
artanh(x) = = In LR
2 1--7x
d(cosh
stconto -- sinh(x)
d(sinh
to) -- cosh(x)
x
arctan(x) = arcsin (=)
V1+2?
d(arctan(x)) 1
dx U l+x
__f--> 0° 0? 0?
Af(x,y,2) = div (grad f(x,y,2)) = D + . + ci
_ tan(a) +tan(b)
tan(a +0) = 1 --tan(a)tan(b)
2020-02-19 10:20:31 Page 6/10 CERTES
Les vagues observées dans
le sillage des bateaux ontété
See Do ITR role Aer)
et l'on croyait le phénomène
ee N ere a el EEE
Mais l'étude des bateaux
rapides a révélé un sillage
plus étroit que prévu par la
Lolo Re EST [CT Re Ter
Ce qui, finalement, peut
s'expliquer assez simplement:
2020-02-19 10:20:31
Annexe 1
Du neuf dans les sillages
Marc Rabaud (marc.rabaud@u-psud.fr) et Frédéric Moisy
Laboratoire FAST, CNRS UMR 7606, Université Paris-Sud, 91405 Orsay
Chacun de nous a déjà vu les petites
vagues formant un « V » qui accompagnent
un canard nageant sur un étang (fig. 1).
Un sillage similaire est visible à l'arrière
d'un bateau avançant sur eau plate, et plus
cénéralement derrière tout obstacle se
déplaçant pas trop lentement à la surface
d'un liquide. Au-delà de son aspect
esthétique, l'existence de ce sillage à de
nombreuses conséquences car les vagues
qui le composent transportent de l'énergie
loin du bateau. On peut s'en apercevoir à
la manière dont un bateau rentrant un peu
trop vite dans un port secoue les autres
bateaux amarrés. Cette énergie rayonnée
correspond au travail d'une force qui
freine le bateau, force dite de « traînée de
vague ». À haute vitesse, cette force de
trainée de vague devient même la
contribution dominante à la résistance à
l'avancement des navires.
Le premier scientifique à s'être intéressé
à cet effet est sans doute William Froude
qui, au XIX® siècle, initia l'utilisation de
maquettes pour des essais de traction en
hydrodynamique navale [1]. C'est toutefois
le nom de Kelvin qui est associé aux
sillages de vagues car c'est lui qui, en 1887
(il portait alors encore le nom de William
Thomson), fut le premier à expliquer la
forme du sillage [2]. En développant pour
cette occasion la méthode dite de la phase
stationnaire, qui s'est avérée depuis très
riche dans de nombreuses branches de la
physique, il démontra que la crête des
ondes en eaux profondes dessine des
formes « en trompette », dont les points de
rebroussement sont situés sur les bords du
« V » (fig. 2). Le résultat le plus surprenant
est que le demi-angle au sommet de ce
«EUR V » vaut y -- arcsin(1/3) -- 19,47°, et
ceci quelles que soient la vitesse U et la
taille L de l'obstacle en mouvement. Ce très
beau résultat, essentiellement géométrique,
est devenu un grand classique de la physique
des vagues, et il est souvent présenté en
cours ou dans les livres d'enseignement
pour illustrer les propriétés de dispersion
des ondes de gravité (voir encadré 1).
SHIP WAVES.
- Wave Pattern.
bn Plan of Guves
7... of Echelon Waves.
2. Illustration issue de l'article de Lord Kelvin montrant les lignes isophases
des vagues
d'accompagnement « en chevrons » d'un navire se déplaçant selon ECA [2]. On y
distingue les ondes
transverses BCD qui se propagent dans la direction du déplacement du bateau, et
les ondes divergentes BA et DA
qui S'éloignent de la trajectoire du bateau. Les points de rebroussement B et D
constituent les bords du sillage
en « V», dit de Kelvin. Les équations reportées sur la figure donnent une
représentation paramétrique (y, x) des
lignes isophases, où le paramètre w varie dans l'intervalle {-1, 1].
Page 7/10
CIEL
© Adrienne Cleveland, www.naturalsights.com.
1. Canard nageant à la surface d'un lac.
La théorie de Kelvin
apparemment mise en défaut
Pourtant, en réalisant une démonstration
de cours avec des étudiants autour d'une
piscine, nous avons constaté que les
mesures n'étaient clairement pas en accord
avec la belle théorie de Kelvin. Plus la
vitesse de l'obstacle était grande et plus
l'angle du sillage diminuait ! Ce résultat
semblait d'ailleurs confirmé par certaines
photos de vedettes rapides montrant des
sillages étroits.
Nous avons donc voulu mieux analyser
ce phénomène. Il y a toutefois deux diffi-
cultés à surmonter d'un point de vue
expérimental : (1) si l'on travaille en piscine
avec des maquettes forcément relativement
petites, 1l y a des effets correctifs dus aux
2020-02-19 10:20:31
forces capillaires, ce qui vient compliquer
la géométrie du sillage [9], et (1) si l'on
travaille à l'échelle 1:1 à partir de photo-
graphies de sillages de vrais bateaux, 1l est
souvent difficile de mesurer précisément
les angles à cause d'effets de perspective.
Nous avons contourné ces difficultés en
travaillant à partir d'images aériennes, et
donc en incidence presque normale,
disponibles sur Internet grace à Google
Earth®. En sélectionnant des images au-
dessus de lacs ou du littoral pour avoir une
bonne résolution, nous avons mesuré des
angles de sillages qui varient entre 7 et 20°
(fig. 3 et réf. [3]).
Autre avantage de ces images aériennes,
elles sont disponibles avec une calibration
spatiale qui permet de mesurer la longueur L
des bateaux d'une part, mais aussi de calculer
encadré 1
Page 8/10
italGlobe
© 2014 Digi
3. Vue aérienne d'un sillage étroit, d'environ
9 degrés, d'une vedette rapide sur le lac Ontario près
de Toronto.
leur vitesse U. En effet, à partir de la
mesure de la longueur d'onde visible dans
le sillage et de la direction de propagation
de ces ondes, la condition de stationnarité
(présentée dans l'encadré 2) permet de
déterminer la vitesse du bateau. Nous
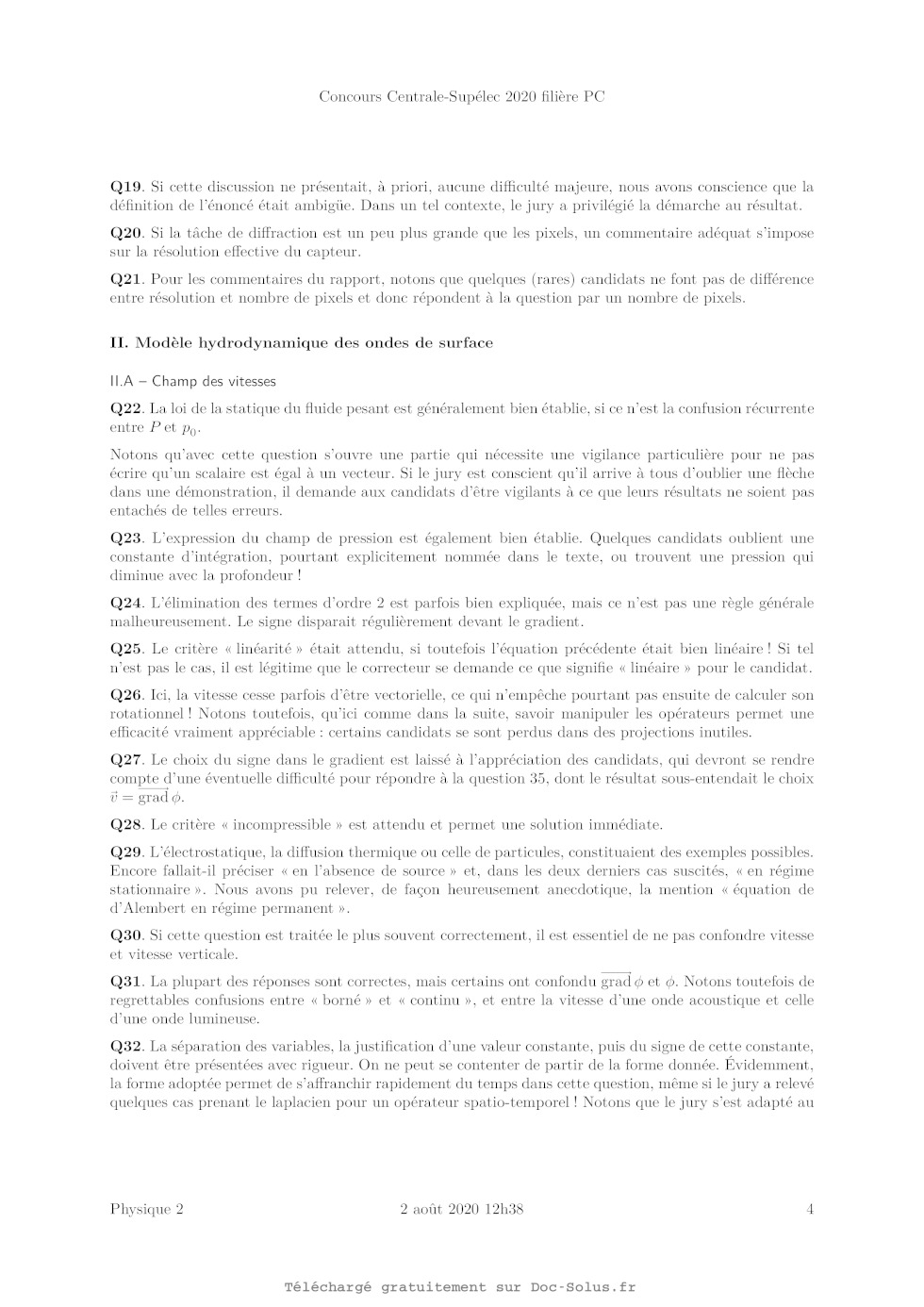
avons alors tracé la valeur des angles de
sillages en fonction du nombre de Froude
de coque, nombre sans dimension défini
par Fr = U/(gL)!/?, et qui compare la
vitesse du bateau à la vitesse des ondes de
gravité ayant pour longueur d'onde la
longueur du bateau. La figure 4 montre
que les résultats se rassemblent assez bien
sur une courbe unique. Tant que Fr < 0,5, les mesures sont en accord avec la prédic- on de Kelvin d'un angle constant. Mais au-delà de cette valeur elles montrent une nette décroissance, suivant une loi en 1/Fr. Ces observations ont été confirmées en simulant numériquement l'émission d'ondes de gravité par un objet en mouvement [4|, et ont été récemment confirmées analyti- quement par des collègues de l''ESPCI [5]. b Avancees de la recherche 40 T 20 Demi-angle de sillage a (deg.) o | JL -- Kelvin = loien 1/Fr ©@ Images B Simulations 4 'w a 3 L 1 L 1 L | 0,1 0,2 0,4 0,6 1 2 3 Nombre de Froude Fr 4, Évolution du demi-angle « du sillage observé en fonction du nombre de Froude Fr = U/(gl)/2, montrant une transition entre le régime de Kelvin (angle constant égal à 19,47") et le régime en 1/Fr à haute vitesse. 5. Simulation numérique d'un sillage induit par une perturbation de pression gaussienne se déplaçant à nombre de Froude Fr = 0,5 (a) et 1,5 (b). 2020-02-19 10:20:31 Page 9/10 (co BY-NC-SA Annexe 2 : Imagerie satellitaire Google Earth© achète ses images satellites à de nombreux prestataires, principalement Landsat@©. Un autre fournisseur d'images est Spot Images®, propriétaire des satellites d'imagerie SPOT. Aïnsi, la résolution n'est pas la même selon l'endroit observé sur le globe et le satellite utilisé. La résolution observée sur Google Earth© va de 15 mètres par pixels à 15 centimètres par pixel. Le satellite d'imagerie commerciale le plus récent est GeoEye 1, qui possède une résolution de 41 centimètres par pixel. SPOT 6 et SPOT 7 forment une constellation de satellites d'observation de la Terre conçue pour assurer la continuité de la disponibilité des données haute résolution et large champ jusqu'en 2024. L'encadré ci-dessous est la traduction d'un extrait des données techniques fournies par Astrium, constructeur des satellites SPOT. -- Architecture générale : double instrument optique sur l'axe central, un viseur d'étoiles à trois têtes, un gyroscope à fibre optique (FOG) et quatre roues de réaction gyrosco- piques (Control Moment Gyroscopes). -- Taille du satellite : approximativement 1,55 X 1,75 x 2,7 m. -- Caractéristiques spatiales : e orbite héliosynchrone à 694 km d'altitude : e période 98,79 min ; e dates de lancement x _ SPOT 6, le 9 septembre 2012 (lanceur PSLV indien), x SPOT 7, le 30 juin 2014 (lanceur PSLV indien). -- Capacités d'imagerie : e résolution des images produites, 1,5 m en panchromatique (0,450-745 pm) : e angle de vue, rotation de la prise de vue de +30° en 14 secondes ; e mode d'imagerie nominal, bandes de 60 km de large orientées dans l'axe Nord/Sud, jusqu'à 600 km de long ; e 5 bandes spectrales d'acquisition simultanées, panchromatique (0,450--745 nm), bleu (0,450-0,520 nm), vert (0,530-0,590 pm, rouge (0,620-0,695 1m) et proche infra- rouge (0,760-0,890 pm) : e programmation réactive, 6 plans de programmation par jour par satellite ; e capacité d'acquisition, 3 X 10% km" par jour et par satellite : e mode d'imagerie stéréo possible ; e capacité de stockage embarqué, 1 Tbits (SSD) : e débit descendant, 300 Mbits/s dans la bande X (8-12 GHz). -- Caractéristiques des instruments optiques : e 2 téléscopes optiques Korsh identiques (type Cassegrain) par satellite, comprenant chacun trois miroirs asphériques et deux miroirs de repliement : e miroir principal de diamètre D) -- 200 mm et nombre d'ouverture (rapport entre diamètre d'ouverture et focale) de 16 : e capteur panchromatique, matrice CCD 12 bits type TDI (time delay integration) de 7000 pixels de large, taille d'un pixel : 12 pm. ee erINesee 2020-02-19 10:20:31 Page 10/10 CERTES