
Mines Informatique MP-PC-PSI 2021
| Thème de l'épreuve | Marchons, marchons, marchons... |
| Principaux outils utilisés | programmation Python, bases de données, complexité |
| Mots clefs | marche auto-évitante, mouvement brownien, simulation, randonnée, stochastique, Monte-Carlo |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)


Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
A2021 --- INFO
Cm
Concours commun
Mines-Ponts
ÉCOLE DES PONTS PARISTECH,
ISAE-SUPAERO, ENSTA PARIS,
TÉLÉCOM PARIS, MINES PARIS,
MINES SAINT-ÉTIENNE, MINES NANCY,
IMT ATLANTIQUE, ENSAE PARIS,
CHIMIE PARISTECH - PSL.
Concours Mines-Télécom,
Concours Centrale-Supélec (Cycle International).
CONCOURS 2021
ÉPREUVE D'INFORMATIQUE COMMUNE
Durée de l'épreuve : 2 heures
L'usage de la calculatrice et de tout dispositif électronique est interdit.
Cette épreuve est commune aux candidats des filières MP, PC et PSI.
Les candidats sont priés de mentionner de façon apparente
sur la première page de la copie :
INFORMATIQUE COMMUNE
L'énoncé de cette épreuve comporte 10 pages de texte.
Si, au cours de l'épreuve, un candidat repère ce qui lui semble être une erreur
d'énontcé, il le
signale sur sa copie et poursuit sa composition en expliquant les raisons des
initiatives qu'il est
amené à prendre.
Les sujets sont la propriété du GIP CCMEP. Ils sont publiés sous les termes de
la licence
Creative Commons Attribution - Pas d'Utilisation Commerciale - Pas de
Modification 3.0 France.
Tout autre usage est soumis à une autorisation préalable du Concours commun
Mines Ponts.
Marchons, marchons, marchons....
Ce sujet propose d'appliquer des techniques informatiques à l'étude de trois
marches de nature différente :
-- une marche concrète (partie I - Randonnée)
-- une marche stochastique (partie II - Mouvement brownien d'une petite
particule)
-- une marche auto-évitante (partie IT - Marche auto-évitante)
Les trois parties sont indépendantes. L'annexe à la fin du sujet (pages 8 à 10)
fournit les canevas de code en
Python que vous devrez reprendre dans votre copie pour répondre aux questions
de programmation.
Partie I. Randonnée
Lors de la préparation d'une randonnée, une accompagnatrice doit prendre en
compte les exigences des
participants. Elle dispose d'informations rassemblées dans deux tables d'une
base de données :
-- Ja table Rando décrit les randonnées possibles -- la clef primaire entière
rid, son nom, le niveau de
difficulté du parcours (entier entre 1 et 5), le dénivelé (en mètres), la durée
moyenne (en minutes) :
rid rnom diff | deniv | duree
1 | La belle des champs 1 20 30
2 | Lac de Castellane 4 650 150
3 | Le tour du mont 2 200 120
4 | Les crêtes de la mort 5 1200 360
5 | Yukon Ho! 3 700 210
-- la table Participant décrit les randonneurs -- la clef primaire entière pid,
le nom du randonneur, son
année de naissance, le niveau de difficulté maximum de ses randonnées :
pid | pnom ne |diff max
1 | Calvin | 2014 2
2 | Hobbes | 2015 2
3 | ousie 2014 2
4 | Rosalyn | 2001 4
Donner une requête SQL sur cette base pour :
HJ Q1 -- Compter le nombre de participants nés entre 1999 et 2003 inclus.
J Q2 -- Calculer la durée moyenne des randonnées pour chaque niveau de
difficulté.
LH Q3 -- Extraire le nom des participants pour lesquels la randonnée n°42 est
trop difficile.
1 Q4 - Extraire les clés primaires des randonnées qui ont un ou des homonymes
(nom identique et clé
primaire distincte), sans redondance.
L'accompagnatrice a activé le suivi d'une randonnée par géolocalisation
satellitaire et souhaite obtenir
quelques propriétés de cette randonnée une fois celle-ci effectuée. Elle a
exporté les données au format texte
CSV (comma-separated values -- valeurs séparées par des virgules) dans un
fichier nommé suivi_rando.csv:
la première ligne annonce le format, les suivantes donnent les positions dans
l'ordre chronologique.
Voici le début de ce fichier pour une randonnée partant de Valmorel, en Savoie,
un bel après-midi d'été :
lat(°) ,long(°) ,height(m) ,time(s)
45.461516,6.44461,1315.221,1597496965
45.461448 ,6.444426,1315.702,1597496980
45 .461383,6.444239 ,1316.182,1597496995
45.461641,6.444035,1316.663,1597496710
45.461534,6.443879,1317.144,1597496725
45.461595,6.4437,1317.634,1597496740
45.461562,6.443521,1318.105,1597496755
Le module math de Python fournit les fonctions asin, sin, cos, sgrt et radians.
Cette dernière convertit
des degrés en radians. La documentation donne aussi des éléments de
manipulation de fichiers textuels :
fichier = open(nom_fichier, mode) ouvre le fichier, en lecture si mode est "r".
ligne = fichier.readline() récupère la ligne suivante de fichier ouvert en
lecture avec open.
lignes = fichier.readlines() donne la liste des lignes suivantes.
fichier.close() ferme fichier, ouvert avec open, après son utilisation.
ligne.split(sep) découpe la chaîne de caractères ligne selon le séparateur sep
: si ligne vaut "42,43 ,44",
alors ligne .split(",") renvoie la liste ["42", "48", "4an"].
On souhaite exploiter le fichier de suivi d'une randonnée -- supposé
préalablement placé dans le répertoire
de travail -- pour obtenir une liste coords des listes de 4 flottants
(latitude, longitude, altitude, temps)
représentant les points de passage collectés lors de la randonnée.
À partir du canevas fourni en annexe et en ajoutant les import nécessaires :
LH Q5 -- Implémenter la fonction importe_rando(nom_fichier) qui réalise cette
importation en retournant
la liste souhaitée, par exemple en utilisant certaines des fonctions ci-dessus.
On suppose maintenant l'importation effectuée dans coords, avec au moins deux
points d'instants distincts.
1 Q6 -- Implémenter la fonction plus_haut(coords) qui renvoie la liste
(latitude, longitude) du point le
plus haut de la randonnée.
1 Q7 -- Implémenter la fonction deniveles(coords) qui calcule les dénivelés
cumulés positif et négatif (en
mètres) de la randonnée, sous forme d'une liste de deux flottants. Le dénivelé
positif est la somme des
variations d'altitude positives sur le chemin, et inversement pour le dénivelé
négatif.
On souhaite évaluer de manière approchée la distance parcourue lors d'une
randonnée. On suppose la Terre
parfaitement sphérique de rayon Rr = 6371 km au niveau de la mer. On utilise la
formule de haversine pour
calculer la distance d du grand cercle sur une sphère de rayon r entre deux
points de coordonnées (latitude,
longitude) (1, À1) et (42, 2)
-- À2 -- À
d = 2rarcsin ( (252) + cos(@1) cos(y2) sin' ee)
On prendra en compte l'altitude moyenne de l'arc, que l'on complètera pour la
variation d'altitude par la
formule de Pythagore, en assimilant la portion de cercle à un segment droit
perpendiculaire à la verticale.
LH Q8 -- Implémenter la fonction distance(ci, c2) qui calcule avec cette
approche la distance en mètres
entre deux points de passage. On décomposera obligatoirement les formules pour
en améliorer la lisibilité.
LH Q9 -- Implémenter la fonction distance_totale(coords) qui calcule la
distance en mètres parcourue au
cours d'une randonnée.
Partie II. Mouvement brownien d'une petite particule
De petites particules en suspension dans un liquide se déplacent spontanément
sous l'effet de l'agitation
thermique du milieu environnant, donnant ainsi naissance à des trajectoires
apparemment chaotiques et peu
régulières. Ce phénomène est à la base de la vie : l'agitation incessante des
protéines permet aux réactions
biochimiques de se produire à l'intérieur de nos cellules. Il à été observé
expérimentalement en 1827 sur
des grains de pollen en suspension dans l'eau par le botaniste ROBERT BROWN,
d'où le nom de mouvement
brownien. Son étude théorique par ALBERT EINSTEIN en 1905 a permis au physicien
JEAN PERRIN d'estimer
la valeur du nombre d'Avogadro dans une série d'expériences menées entre 1907
et 1909.
Dans cette partie, on s'intéresse à un modèle du mouvement brownien proposé par
PAUL LANGEVIN en 1908.
Dans ce modèle, la particule étudiée est supposée soumise à deux actions de la
part du fluide :
--
-- une force de frottement fluide fr = av :
T7 ' ' '
-- une force fB aléatoire simulant l'action désordonnée des molécules d'eau sur
la particule.
Le mouvement de cette particule est donc régi par l'équation différentielle :
dù _ av fs
dt _ m mm
Pour faire une simulation en deux dimensions, on prend une particule de masse m
= 10 kg, on attribue
à a la valeur 10° kg/s, on suppose enfin que fg change à chaque pas
d'intégration, avec une direction
isotrope aléatoire (l'angle suit une loi de probabilité uniforme) et une norme
qui est la valeur absolue d'une
variable aléatoire suivant une loi de probabilité gaussienne (loi normale)
d'espérance y nulle et d'écart-type
o=10 Y N.
On simule le vecteur d'état E = (x,y,#,ÿ) de la particule en intégrant Ë = (x,
ÿ, #,ÿ) selon la méthode
d''Euler. E et E seront chacun représentés par une liste de 4 flottants.
L'instruction assert expression de Python vérifie la véracité d'une expression
booléenne et interrompt
brutalement l'exécution du programme si ce n'est pas le cas. Elle permet de
vérifier très simplement une
précondition ou un invariant, comme illustré à la ligne 10 du canevas.
Le module random fournit la fonction uniform(bi, bs) qui renvoie un flottant
aléatoire entre les valeurs bi
et bs incluses en utilisant une densité de probabilité uniforme ainsi que la
fonction gauss(mu, sigma) qui
renvoie un flottant aléatoire en utilisant une densité de probabilité
gaussienne d'espérance mu et d'écart-type
sigma.
Le module math fournit enfin les fonctions cos et sin (en radians), la fonction
sgrt et la constante pi. La
fonction abs est directement disponible.
En utilisant le canevas fourni en annexe et en ajoutant les import nécessaires :
1 Q10 -- Implémenter la fonction vma(vi, a, v2) (multiplication-addition sur
des vecteurs) avec vi et v2
des listes de flottants et a un scalaire flottant, qui renvoie une nouvelle
liste de flottants correspondant à :
D = 0 + avi
La fonction vérifiera que les deux listes en entrée sont de même longueur avec
assert.
LH Q11 -- Implémenter la fonction derive(E) qui renvoie la dérivée du vecteur
d'état passé en paramètre
d'après l'équation différentielle décrite en introduction de la partie.
LH Q12 -- Implémenter la fonction euler(E0, dt, n) pour résoudre numériquement
l'équation différentielle
par la méthode d'Euler avec EO le vecteur d'état initial, dt le pas
d'intégration et n le nombre de pas de la
simulation. La fonction renvoie la liste des n + 1 vecteurs d'état.
À titre d'exemple, voici le tracé d'une trajectoire obtenue par cette méthode :
LO +
0.5
él AS /
(mm)
w
À Ke S
L D?
10 b-- Y/
D
30 -25 -20 -15 -10 05 00 0.5
Partie III. Marche auto-évitante
Une marche auto-évitante est un processus au cours duquel un point décrit un
chemin auto-évitant, c'est-à-
dire qui ne se recoupe jamais lui-même. Ce modèle peut servir lors de la
modélisation d'une chaîne polymère.
En effet, deux monomères distincts de la chaîne ne peuvent pas se trouver à
deux positions identiques pour
des raisons d'encombrement stérique.
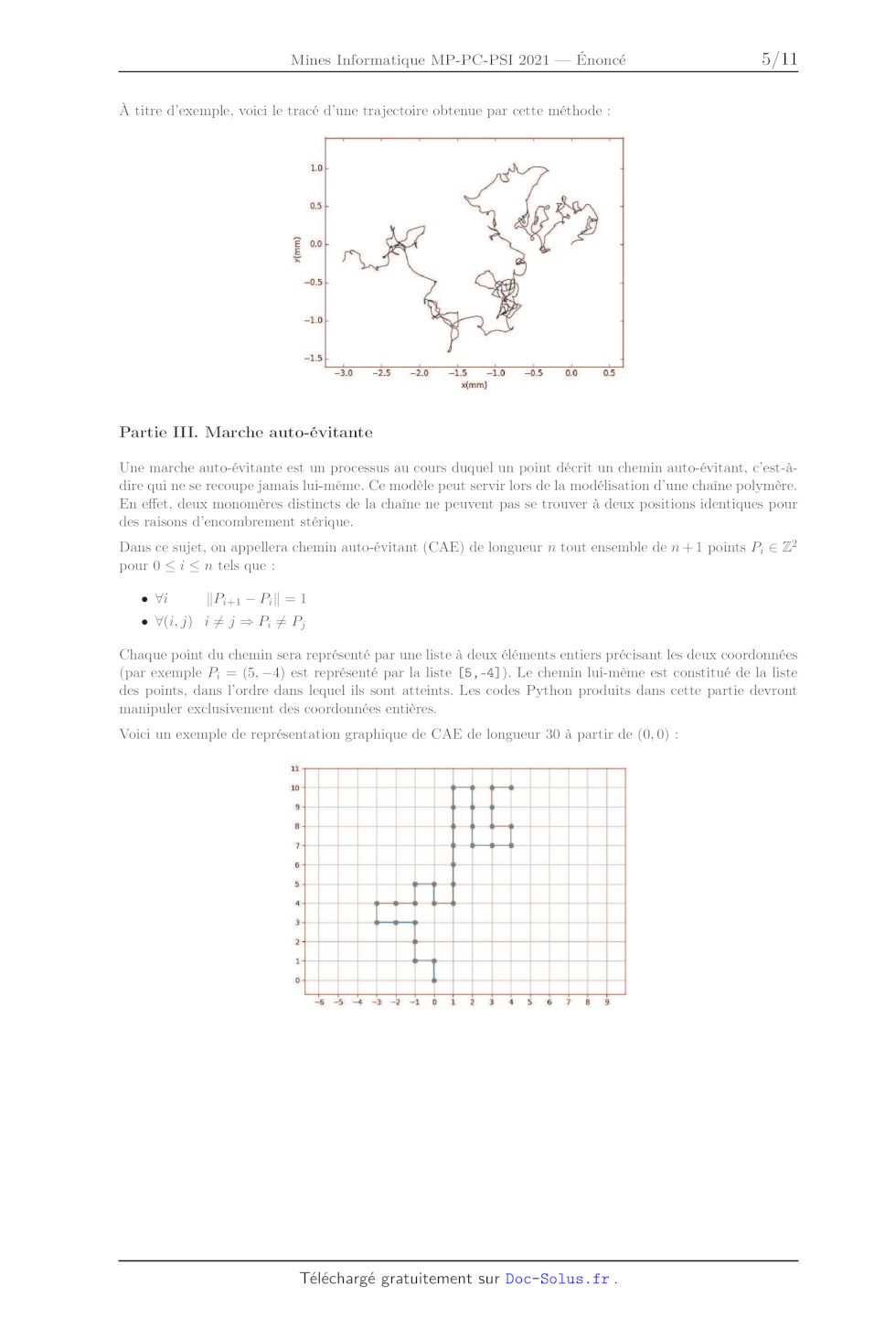
Dans ce sujet, on appellera chemin auto-évitant (CAE) de longueur n tout
ensemble de n + 1 points P; EUR Z°
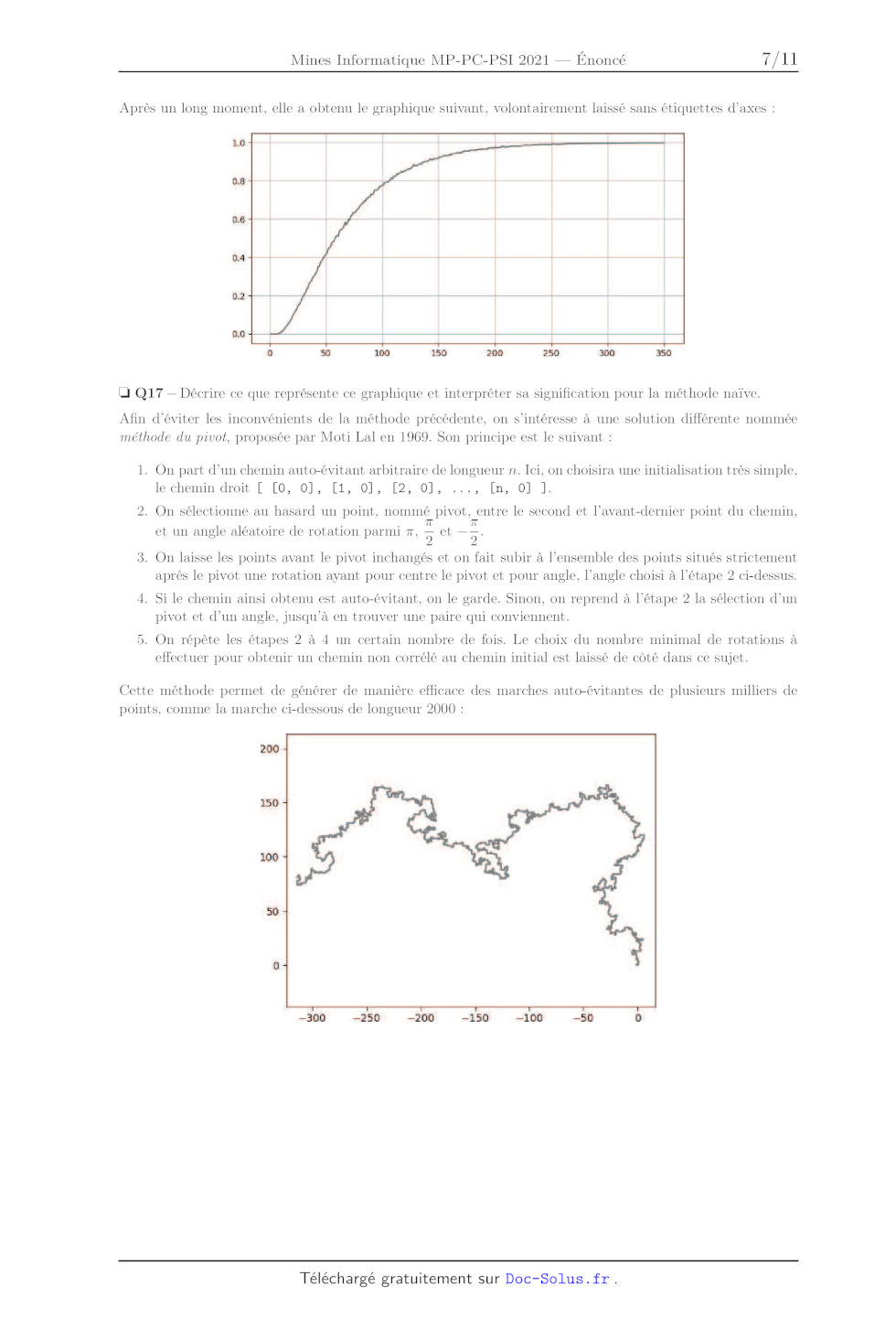
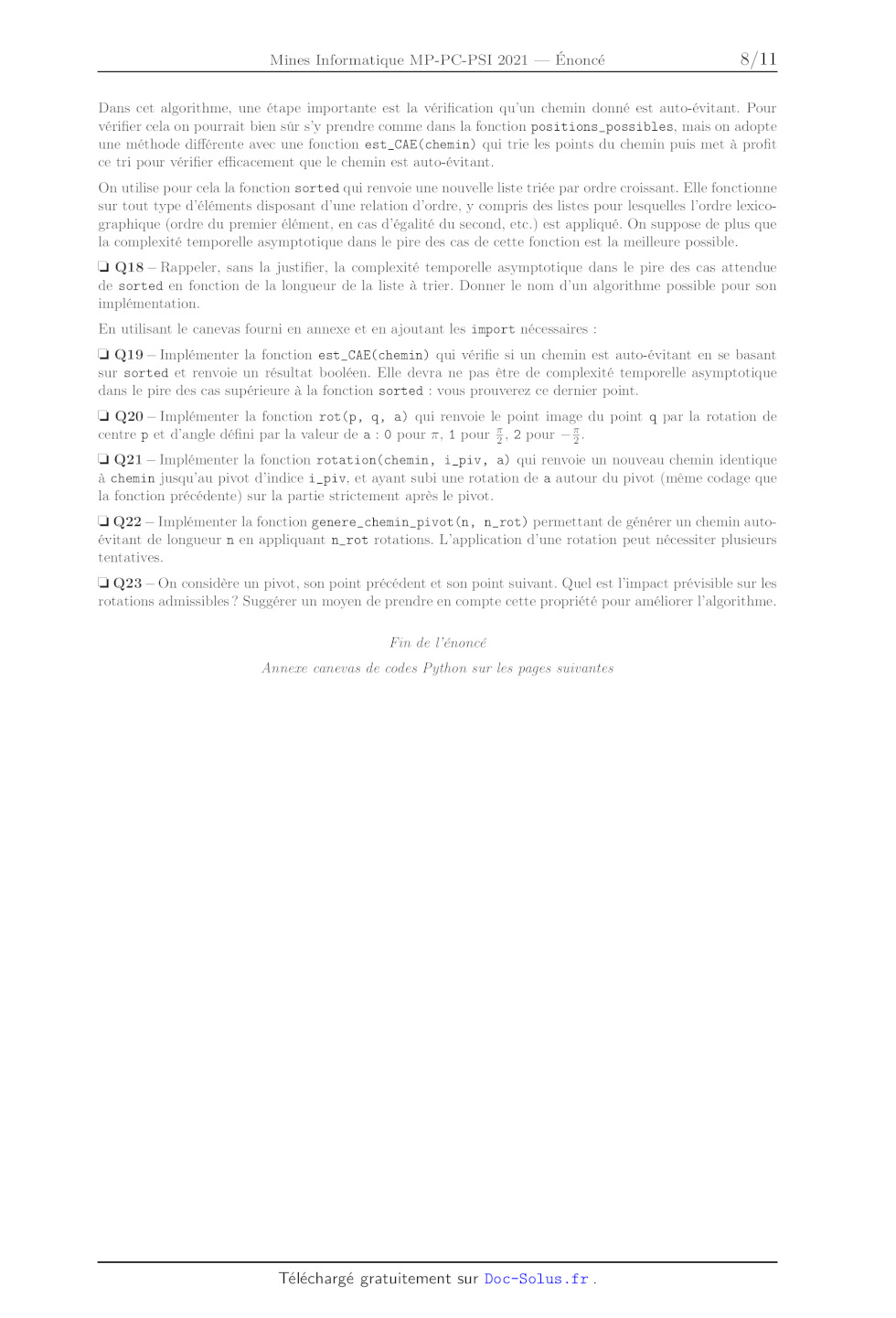
pour 0 < 3 < n tels que : e V(ij) i#j= PP Chaque point du chemin sera représenté par une liste à deux éléments entiers précisant les deux coordonnées (par exemple P; = (5, ---4) est représenté par la liste [5,-4]). Le chemin lui-même est constitué de la liste des points, dans l'ordre dans lequel ils sont atteints. Les codes Python produits dans cette partie devront manipuler exclusivement des coordonnées entières. Voici un exemple de représentation graphique de CAE de longueur 30 à partir de (0, 0) : 11 104 ------ + --- + 9 + + + 8 + + 7 _ + 6 . 5 » 4 Ê 3 e 2 # 1 | [TT 4 2 9 à À À S 4 à S 6 7 à « On s'intéresse dans un premier temps à une méthode naïve pour générer un chemin auto-évitant de longueur n sur une grille carrée. La méthode adoptée est une approche gloutonne : 1. Le premier point est choisi à l'origine : P5 = (0,0). 2. En chaque position atteinte par le chemin, on recense les positions voisines accessibles pour le pas suivant et on en sélectionne une au hasard. En l'absence de positions accessibles l'algorithme échoue. 3. On itère l'étape 2 jusqu'à ce que le chemin possède la longueur désirée ou échoue. Le module random fournit la fonction randrange(a, b) qui renvoie un entier compris entre a et b--1 inclus, ainsi que la fonction choice(L) qui renvoie l'un des éléments de la liste L, dans les deux cas choisis aléatoirement avec une probabilité uniforme. L'expression x in L est une expression booléenne qui vaut True si x est l'un des éléments de L et False dans le cas contraire. On supposera que la méthode employée pour évaluer cette expression sur une liste est une recherche séquentielle. La valeur spéciale None est utilisée en Python pour représenter une valeur invalide, inconnue ou indéfinie. L'expression booléenne v is None indique si la valeur de v est cette valeur spéciale. En utilisant le canevas fourni en annexe et en ajoutant les import nécessaires : J Q13 -- Implémenter la fonction positions_possibles(p, atteints) qui construit la liste des positions suivantes possibles à partir du point p. La liste atteints contient les points déjà atteints par le chemin. LH Q14 -- Mettre en évidence graphiquement un exemple de CAE le plus court possible pour lequel, à une étape donnée, la fonction positions_possibles va renvoyer une liste vide. En prenant en compte les symé- tries, combien de tels chemins distincts existent pour cette longueur minimale ? J Q15 -- Implémenter la fonction genere_chemin_naif(n) qui construit la liste des points représentant le chemin auto-évitant de longueur n et renvoie le résultat, ou bien renvoie la valeur spéciale None si à une étape positions_possibles renvoie une liste vide. D Q16 -- Évaluer avec soin la complexité temporelle asymptotique dans le pire des cas de la fonction genere_chemin_naif(n) en fonction de n, en supposant que la fonction ne renvoie pas None. Une personne curieuse et patiente a écrit le code suivant : 1 from chemin import genere_chemin_naif 3 N, M, L, P = 10000, 351, [], [ s for n in range(1, M): 6 nb = 0 7 for i in range(N): 8 chemin - genere_chemin_naif(n) 9 if chemin is None: 10 nb += 1 11 L.append(n) 12 P.append(nb / N) 13 14 import matplotlib.pyplot as plt 15 plt.plot(L, P) 16 plt.grid() 17 plt.show() Après un long moment, elle a obtenu le graphique suivant, volontairement laissé sans étiquettes d'axes : LO - 0.8 - 0.6 - 0.4 - 0.2 - 0.0 - 0 50 100 150 200 250 300 350 LH Q17 -- Décrire ce que représente ce graphique et interpréter sa signification pour la méthode naïve. Afin d'éviter les inconvénients de la méthode précédente, on s'intéresse à une solution différente nommée méthode du pivot, proposée par Moti Lal en 1969. Son principe est le suivant : 1. On part d'un chemin auto-évitant arbitraire de longueur n. Ici, on choisira une initialisation très simple, le chemin droit [ [O, O0], [1, OI, [2, O0], ..., [n, O] 1]. On sélectionne au hasard un point, nommé pivot, entre le second et l'avant-dernier point du chemin, . . T et un angle aléatoire de rotation parmi T, 5 et T3 On laisse les points avant le pivot inchangés et on fait subir à l'ensemble des points situés strictement après le pivot une rotation ayant pour centre le pivot et pour angle, l'angle choisi à l'étape 2 ci-dessus. . oi le chemin ainsi obtenu est auto-évitant, on le garde. Sinon, on reprend à l'étape 2 la sélection d'un pivot et d'un angle, jusqu'à en trouver une paire qui conviennent. On répète les étapes 2 à 4 un certain nombre de fois. Le choix du nombre minimal de rotations à effectuer pour obtenir un chemin non corrélé au chemin initial est laissé de côté dans ce sujet. Cette méthode permet de générer de manière efficace des marches auto-évitantes de plusieurs milliers de points, comme la marche ci-dessous de longueur 2000 : 200 - "C 150 - 100 - 4 So -- [a < Î l | F Ï Î Ï --300 --250 -- 200 --150 --100 --30 O Dans cet algorithme, une étape importante est la vérification qu'un chemin donné est auto-évitant. Pour vérifier cela on pourrait bien sûr s'y prendre comme dans la fonction positions_possibles, mais on adopte une méthode différente avec une fonction est_CAE(chemin) qui trie les points du chemin puis met à profit ce tri pour vérifier efficacement que le chemin est auto-évitant. On utilise pour cela la fonction sorted qui renvoie une nouvelle liste triée par ordre croissant. Elle fonctionne sur tout type d'éléments disposant d'une relation d'ordre, y compris des listes pour lesquelles l'ordre lexico- graphique (ordre du premier élément, en cas d'égalité du second, etc.) est appliqué. On suppose de plus que la complexité temporelle asymptotique dans le pire des cas de cette fonction est la meilleure possible. HJ Q18 -- Rappeler, sans la justifier, la complexité temporelle asymptotique dans le pire des cas attendue de sorted en fonction de la longueur de la liste à trier. Donner le nom d'un algorithme possible pour son implémentation. En utilisant le canevas fourni en annexe et en ajoutant les import nécessaires : LH Q19 -- Implémenter la fonction est_CAE(chemin) qui vérifie si un chemin est auto-évitant en se basant sur sorted et renvoie un résultat booléen. Elle devra ne pas être de complexité temporelle asymptotique dans le pire des cas supérieure à la fonction sorted : vous prouverez ce dernier point. HJ Q20 -- Implémenter la fonction rot(p, q, a) qui renvoie le point image du point q par la rotation de centre p et d'angle défini par la valeur de a : 0 pour 7, 1 pour 5, 2 pour --5. LH Q21 -- Implémenter la fonction rotation(chemin, i_piv, a) qui renvoie un nouveau chemin identique à chemin jusqu'au pivot d'indice i_piv, et ayant subi une rotation de a autour du pivot (même codage que la fonction précédente) sur la partie strictement après le pivot. J Q22 -- Implémenter la fonction genere_chemin_pivot(n, n_rot) permettant de générer un chemin auto- évitant de longueur n en appliquant n_rot rotations. L'application d'une rotation peut nécessiter plusieurs tentatives. LH Q23 -- On considère un pivot, son point précédent et son point suivant. Quel est l'impact prévisible sur les rotations admissibles ? Suggérer un moyen de prendre en compte cette propriété pour améliorer l'algorithme. Fin de l'énoncé Annexe canevas de codes Python sur les pages suivantes Annexe : canevas de codes Python -- Partie I : Randonnée © © HN OO À BR À NN H © CD CD C0 0 9 D D ND ND ND NO NO NON ON ON ON OM OO OK OO OH OH H ND OO OR À ND M © © D D À BB À NO OH © OO © NN D À À À NN HO # import Python à compléter... # importation du fichier d'une randonnée def importe_rando(nom_fichier): # À compléter... coords -- importe_rando('"suivi _ rando.csv") # donne Le point (latitude, longitude) Le plus haut de La randonnée def plus_haut (coords) : # À compléter... print('"point le plus haut", plus_haut(coords)) # exemple : point le plus haut [45.461451, 6.443064] # calcul des dénivelés positif et négatif de la randonnée def deniveles (coords) : # À compléter... print('dénivelés", deniveles(coords)) # exemple : denivelés [4.0599999999999/5, -1.1759999999999309] RT = 6371 # rayon moyen volumétrique de la Terre en km # distance entre deux points def distance(ci, c2): # À compléter... print("premier intervalle", distance(coords[0], coords[1]), "m") # exemple : premier intervalle 16.23096/25/992816 m # distance totale de La randonnée def distance totale(coords): # À compléter... print('"distance parcourue", distance_totale(coords), "m') # exemple : distance parcourue 187.970090/658368 m -- Partie II : Mouvement brownien © © NN OO Où À À NN H ND ON Em M M M M HO M HA RO © ® Y OO Où À À NN H © 22 23 24 25 26 27 28 29 30 31 32 # import Python à compléter... # paramètres physiques MU = 0.0 # N SIGMA = 1E-8 # N M = 1E-6 # kg ALPHA = 1E-5 # kg/s # vérification des hypothèses sur les paramètres assert MU >- O0 and SIGMA > O and M > O and ALPHA > O
# multiplication-addition vectorielle
def vma(vi, a, v2):
# À compléter...
# dérivée du vecteur
def derive(E):
# À compléter...
# intégration par La
def euler(EO, dt, n):
Es = [ EO ]
# À compléter...
return Es
# simulation
DT = 0.002
Es = euler([ 0.0, 0.0, 0.0, 0.0 ], DT, N)
print('trajectoire",
d'état
méthode d'Euler
# durée du pas en secondes
N = 5000 # nombre de pas
Es)
-- Partie III : Chemin auto-évitant - méthode naïve
© © NN OO Où À À NN H
A HA OH OH EH EH HA H
NN OO Où BB % ND + ©
© © HN OO Où À À NN H
OS OS
D OM OO © D HN D À BB À NN H ©
# import Python à compléter...
# positions auto-évitantes suivantes possibles
def positions _possibles(p, atteints):
possibles - []
# À compléter...
return possibles
# génération gloutonne d'un chemin de longueur n
# renvoie None en cas d'échec
def genere_chemin_naif(n):
chemin = [ [ O0, O ] ] # on part de l'origine
# À compléter...
return chemin
N = 10
print('chemin", genere_chemin_naif(N))
Partie III : Chemin auto-évitant - méthode du pivot
# import Python à compléter...
# vérifie si un chemin est CAE
def est_CAE(chemin) :
# À compléter...
# calcule La rotation de q autour de p selon a :
# Pi si a vaut 0, Pi/2 si a vaut 1, -Pi/2 si a vaut 2
def rot(p, q, a):
# À compléter...
# renvoie Le chemin dont les points après i_pivot
# ont subi une rotation a codé comme précédemment
def rotation(chemin, i_pivot, a):
# À compléter...
# génère un chemin de longueur n (donc n+1 points)
def genere_chemin_pivot(n, n_rot):
# À compléter...
N, À = 1000, 2.3
print('"chemin", genere_chemin_pivot(N, int( À * N )))
10