
Centrale Informatique MP-PC-PSI 2020
| Thème de l'épreuve | Photomosaïque |
| Principaux outils utilisés | représentation des nombres en mémoire, algorithmique de listes, programmation Python, bibliothèque NumPy, bases de données |
| Mots clefs | photomosaïque, images, surfeur, pixel, vignette, redimensionnement, base de données, internationalisation |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - -

Énoncé complet
(télécharger le PDF)



Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
Informatique
"
MP, PC, PSI, TSI
CONCOURS CENTRALE-SUPÉLEC 3 heures Calculatrice autorisée
2020
Photomosaïque
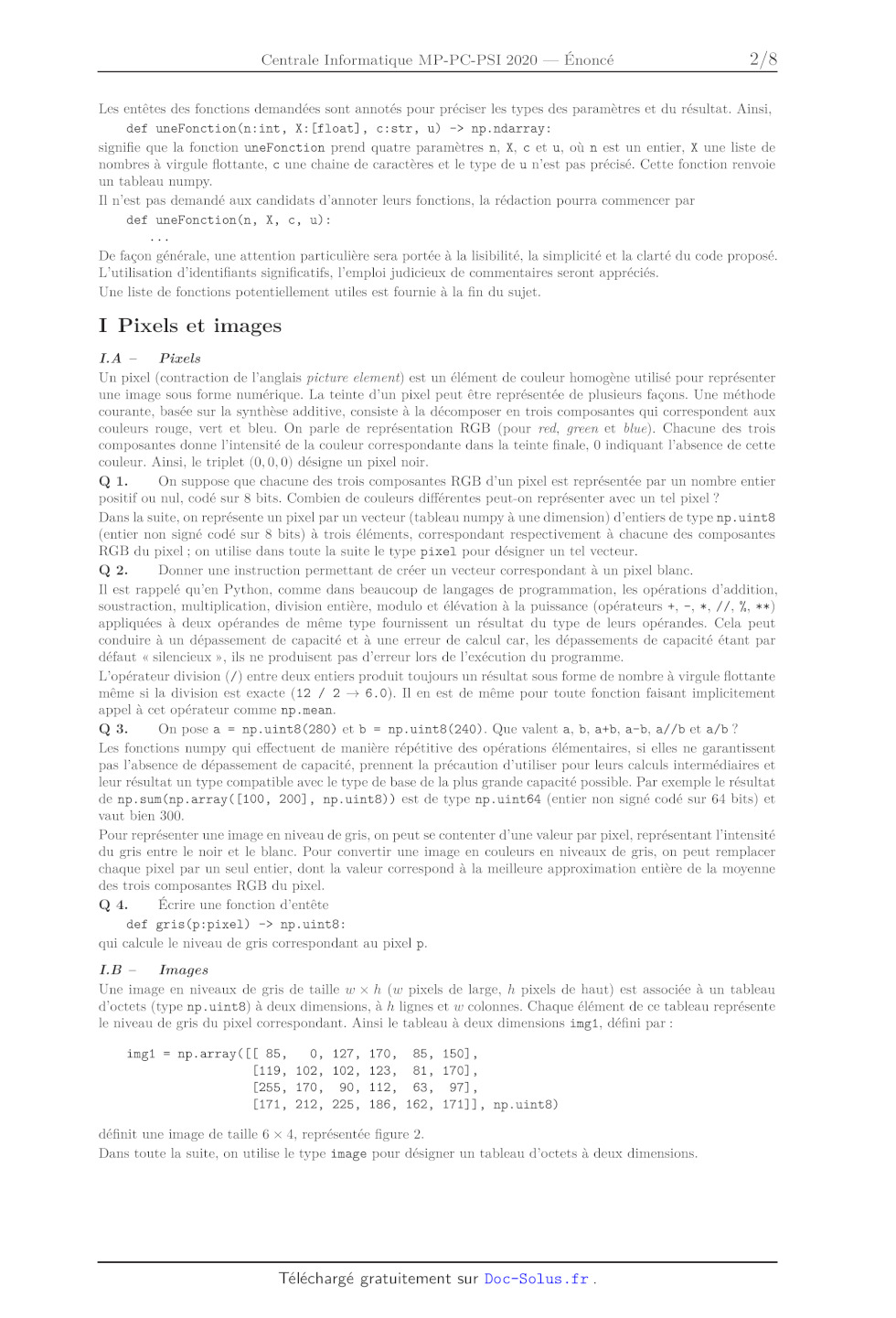
Une photomosaïque (figure 1) est une image composée à la manière d'une
mosaïque, où les fragments sont eux-
mêmes des petites images, appelées vignettes. Elle est créée à partir d'une
image appelée image source. Chaque
vignette remplace une zone de même forme dans l'image source appelée pavé. Les
vignettes sont fabriquées à
partir d'une collection d'images appelée banque d'images.
L'intérêt est essentiellement artistique : vue de loin, une photomosaïque
ressemble à l'image source ; en se
rapprochant, on reconnait les vignettes.
Figure 1 Photomosaiïque d'un surfer composée de 1600 vignettes -- de gauche à
droite : l'image source!, la
photomosaïque et 16 vignettes? (détail du pied)
De nombreux paramètres régissent la construction d'une photomosaïque et la
qualité du résultat :
-- la structure du pavage utilisé (nombre, forme et arrangement des vignettes) ;
-- le nombre et la diversité des images de la banque ;
-- les algorithmes mis en oeuvre pour :
e sélectionner les bonnes images dans la banque (partie IT) :
e redimensionner les images (partie IT) ;
e placer les vignettes (partie IV).
Dans la suite du sujet, les photomosaïques sont construites sur des pavages
rectangulaires réguliers, c'est-à-dire,
constitués de vignettes rectangulaires, toutes de mêmes dimensions et
juxtaposées bord à bord.
Les seuls langages de programmation autorisés dans cette épreuve sont Python et
SQL. Pour répondre à une
question, il est possible de faire appel aux fonctions définies dans les
questions précédentes. Dans tout le sujet,
on suppose que les modules math, numpy, matplotlib.pyplot et random ont été
rendus accessibles grâce à
l'instruction
import math, numpy as np, matplotlib.pyplot as plt, random
Si les candidats font appel à des fonctions d'autres bibliothèques, ils doivent
préciser les instructions d'importa-
tion correspondantes.
Dans tout le sujet, le terme « liste » appliqué à un objet Python signifie
qu'il s'agit d'une variable de type list.
Les termes « vecteur » et « tableau » désignent des objets numpy de type
np.ndarray, respectivement à une
dimension ou de dimension quelconque. Enfin le terme « séquence » représente
une suite itérable et indiçable,
indépendamment de son type Python, ainsi un tuple d'entiers, une liste
d'entiers et un vecteur d'entiers sont
tous trois des « séquences d'entiers ».
l Photo par « Sincerely Media », issue de https://unsplash.com.
2 Vignettes issues de la banque https://picsum.photos/images.
2020-05-13 12:49:13 Page 1/8 (CET
Les entêtes des fonctions demandées sont annotés pour préciser les types des
paramètres et du résultat. Aïnsi,
def uneFonction(n:int, X:[float]l, c:str, u) -> np.ndarray:
signifie que la fonction uneFonction prend quatre paramètres n, X, c et u, où n
est un entier, X une liste de
nombres à virgule flottante, c une chaïne de caractères et le type de u n'est
pas précisé. Cette fonction renvoie
un tableau numpy.
Il n'est pas demandé aux candidats d'annoter leurs fonctions, la rédaction
pourra commencer par
def uneFonction(n, X, c, u):
De façon générale, une attention particulière sera portée à la lisibilité, la
simplicité et la clarté du code proposé.
L'utilisation d'identifiants significatifs, l'emploi judicieux de commentaires
seront appréciés.
Une liste de fonctions potentiellement utiles est fournie à la fin du sujet.
I Pixels et images
LA --- Pixels
Un pixel (contraction de l'anglais picture element) est un élément de couleur
homogène utilisé pour représenter
une image sous forme numérique. La teinte d'un pixel peut être représentée de
plusieurs façons. Une méthode
courante, basée sur la synthèse additive, consiste à la décomposer en trois
composantes qui correspondent aux
couleurs rouge, vert et bleu. On parle de représentation RGB (pour red, green
et blue). Chacune des trois
composantes donne l'intensité de la couleur correspondante dans la teinte
finale, 0 indiquant l'absence de cette
couleur. Aïnsi, le triplet (0,0,0) désigne un pixel noir.
Q 1. On suppose que chacune des trois composantes RGB d'un pixel est
représentée par un nombre entier
positif ou nul, codé sur 8 bits. Combien de couleurs différentes peut-on
représenter avec un tel pixel ?
Dans la suite, on représente un pixel par un vecteur (tableau numpy à une
dimension) d'entiers de type np.uint8
(entier non signé codé sur 8 bits) à trois éléments, correspondant
respectivement à chacune des composantes
RGB du pixel ; on utilise dans toute la suite le type pixel pour désigner un
tel vecteur.
Q 2. Donner une instruction permettant de créer un vecteur correspondant à un
pixel blanc.
Il est rappelé qu'en Python, comme dans beaucoup de langages de programmation,
les opérations d'addition,
soustraction, multiplication, division entière, modulo et élévation à la
puissance (opérateurs +, --, *x, //, %, **)
appliquées à deux opérandes de même type fournissent un résultat du type de
leurs opérandes. Cela peut
conduire à un dépassement de capacité et à une erreur de calcul car, les
dépassements de capacité étant par
défaut « silencieux », ils ne produisent pas d'erreur lors de l'exécution du
programme.
L'opérateur division (/) entre deux entiers produit toujours un résultat sous
forme de nombre à virgule flottante
même si la division est exacte (12 / 2 -- 6.0). Il en est de même pour toute
fonction faisant implicitement
appel à cet opérateur comme np.mean.
Q 3. On pose a = np.uint8(280) et b = np.uint8(240). Que valent a, b, a+b, a-b,
a//b et a/b ?
Les fonctions numpy qui effectuent de manière répétitive des opérations
élémentaires, si elles ne garantissent
pas l'absence de dépassement de capacité, prennent la précaution d'utiliser
pour leurs calculs intermédiaires et
leur résultat un type compatible avec le type de base de la plus grande
capacité possible. Par exemple le résultat
de np.sum(np.array([100, 2001, np.uint8)) cest de type np.uint64 (entier non
signé codé sur 64 bits) ct
vaut bien 300.
Pour représenter une image en niveau de gris, on peut se contenter d'une valeur
par pixel, représentant l'intensité
du gris entre le noir et le blanc. Pour convertir une image en couleurs en
niveaux de gris, on peut remplacer
chaque pixel par un seul entier, dont la valeur correspond à la meilleure
approximation entière de la moyenne
des trois composantes RGB du pixel.
Q 4. Écrire une fonction d'entête
def gris(p:pixel) -> np.uint8:
qui calcule le niveau de gris correspondant au pixel p.
I.B --- Images
Une image en niveaux de gris de taille w x Rk (w pixels de large, À pixels de
haut) est associée à un tableau
d'octets (type np.uint8) à deux dimensions, à À lignes et w colonnes. Chaque
élément de ce tableau représente
le niveau de gris du pixel correspondant. Aïnsi le tableau à deux dimensions
img1, défini par :
imgi = np.array([[ 85, O0, 127, 170, 85, 150],
[119, 102, 102, 123, 81, 170],
[255, 170, 90, 112, 63, 97],
[171, 212, 225, 186, 162, 171]], np.uint8)
définit une image de taille 6 X 4, représentée figure 2.
Dans toute la suite, on utilise le type image pour désigner un tableau d'octets
à deux dimensions.
2020-05-13 12:49:13 Page 2/8 CIEL
img1[1, 5] -- 170
Figure 2 Visualisation de l'image img1
Pour les images en couleurs, on ajoute une dimension pour représenter les trois
composantes d'un pixel. L'ins-
truction source = plt.imread("surfer.jpg") charge dans un tableau numpy l'image
en couleurs contenue
dans le fichier surfer. jpg. Les expressions source.shape et source[0,0] valent
alors respectivement :
(3000, 4000, 3) et np.array([144, 191, 221], np.uint8).
Q 5. Interpréter ces valeurs.
Q 6. Écrire une fonction d'entête
def conversion(a:np.ndarray) -> image:
qui génère une image en niveaux de gris correspondant à la conversion de
l'image en couleurs a.
IT Redimensionnement d'images
On s'intéresse dans cette partie à plusieurs algorithmes de redimensionnement
d'une image A, de taille W x H
(W pixels de large par H pixels de haut, on note N = HW son nombre total de
pixels), en une image a de taille
w x h (on pose n = kw). Nous nous intéresserons dans la suite uniquement à des
images en niveau de gris.
1 W D.
w
*--------------+
H N pixels ----------+- 1 n pixels |.
image a
image À
Figure 3 Redimensionnement d'image
IT, A --- Le contexte
À l'occasion du mariage d'Alice et de Bernard, leurs amis souhaitent réaliser
plusieurs photomosaïques sur
des thèmes variés. Ils ont pour cela accumulé un grand nombre de photos au
ratio 4:3, ce qui signifie que le
rapport W/H vaut exactement 4/3. Les photomosaïques mesureront chacune deux
mètres de large et seront
constituées de 40 x 40 = 1600 vignettes, toutes de même taille et au même ratio
4:3. Pour garder une bonne
qualité d'impression, ils choisissent une résolution de 10 pixels par
millimètre.
Q 7. Quelle taille de vignette (w x h, en pixels) faut-il choisir ? Quelle sera
alors la taille en pixels de la
photomosaïque ?
II.B --- Algorithme d''interpolation au plus proche voisin
H W
Cette interpolation est définie par la formule a(i, j) = À (5 , |) où |x]|
désigne la partie entière de x.
w
Q 8. Écrire une fonction d'entête
def procheVoisin(A:image, w:int, h:int) -> image:
qui renvoie une nouvelle image correspondant au redimensionnement de l'image A
à la taille w x h en utilisant
l'interpolation au plus proche voisin.
Q 9. Quelle est sa complexité temporelle asymptotique ?
ITI.C -- Algorithme de réduction par moyenne locale
On suppose ici que les dimensions de l'image a divisent celles de l'image A:
H/h ct W/w sont entiers. Afin
d'améliorer la qualité de la réduction, on propose la fonction moyenneLocale.
2020-05-13 12:49:13 Page 3/8
def moyenneLocale(A:image, w:int, h:int) -> image:
a = np.empty((h, w), np.uint8)
H, W = ÀA.shape
ph, pu = H//h, W// vw
for I in range(O, H, ph):
for J in range(O, W, pw):
all // ph, J // pwl = round(np.mean(Al[I:I+ph, J:J+pw]))
return a
DO I D Où À À ND H
Q 10. Expliquer en quelques lignes son principe de fonctionnement.
Q 11. Donner sa complexité temporelle asymptotique.
ITI.D -- Optimisation de la réduction par moyenne locale
Afin d'accélérer le calcul de la moyenne locale, on précalcule pour chaque
image sa table de sommation. La table
de sommation d'une image À de N pixels, représentée par le tableau À à H lignes
et W colonnes, est le tableau
S à H +1 lignes et W + 1 colonnes, défini par
VLE[0, HT, Vee[o WI, S@c)= 7 A,j)
O np.ndarray:
qui calcule la table de sommation de l'image A.
On suppose à nouveau que les dimensions de l'image À divisent celles de l'image
a: H/h et W/w sont entiers.
On propose alors la fonction réductionSommationi, qui prend en paramètre
l'image A et sa table de sommation
S (S = tableSommation(A)), ainsi que les dimensions de l'image que l'on
souhaite obtenir.
1 def réductionSommationi(A:image, S:np.ndarray, w:int, h:int) -> image:
2 a = np.empty((h, w), np.uint8)
3 H, W = A.shape
4 ph, pu = H//h, W//w
5 nbp = ph * pw
6 for I in range(0, H, ph):
7 for J in range(O, W, pw):
8 X = (S[I+ph, J+pw] - S[I+ph, J]) - C(S[II, J+pwl - S[I, J])
9 alI // ph, J // pwl = round(X / nbp)
10 return a
Q 14. Expliquer en quelques lignes le principe de fonctionnement de
réductionSommationi.
Q 15. Donner sa complexité temporelle asymptotique.
Q 16. Montrer que la fonction réductionSommation2 dont le code est fourni
ci-dessous donne le même
résultat que réductionSommationi.
def réductionSommation2(A:image, S:np.ndarray, w:int, h:int) -> image:
H, W = AÀ.shape
ph, pw= H//h, W//
sred = S[O:H+1:ph, O:W+1:pwl
dc = sredl:, 1:] - sredl:, :-1]
dl = dcfi:, :] - dcl:-1, :]
d = dl / (ph * pw)
return np.uint8(d.round())
DO I ES OC À EUR ND H
Q 17. Comparer les complexités asymptotiques en temps et en mémoire des deux
versions de la fonction
réductionSommation. Quel est l'avantage de la seconde version ?
IT.E -- Synthèse
Q 18. Discuter des cas d'usage respectifs de procheVoisin, moyenneLocale et
réductionSommation pour
redimensionner une image.
2020-05-13 12:49:13 Page 4/8 CIEL
III Sélection des images de la banque
Une première étape dans la conception d'une photomosaïque est le choix d'une
image source et de vignettes.
Cette partie est consacrée à la sélection d'images dans la banque.
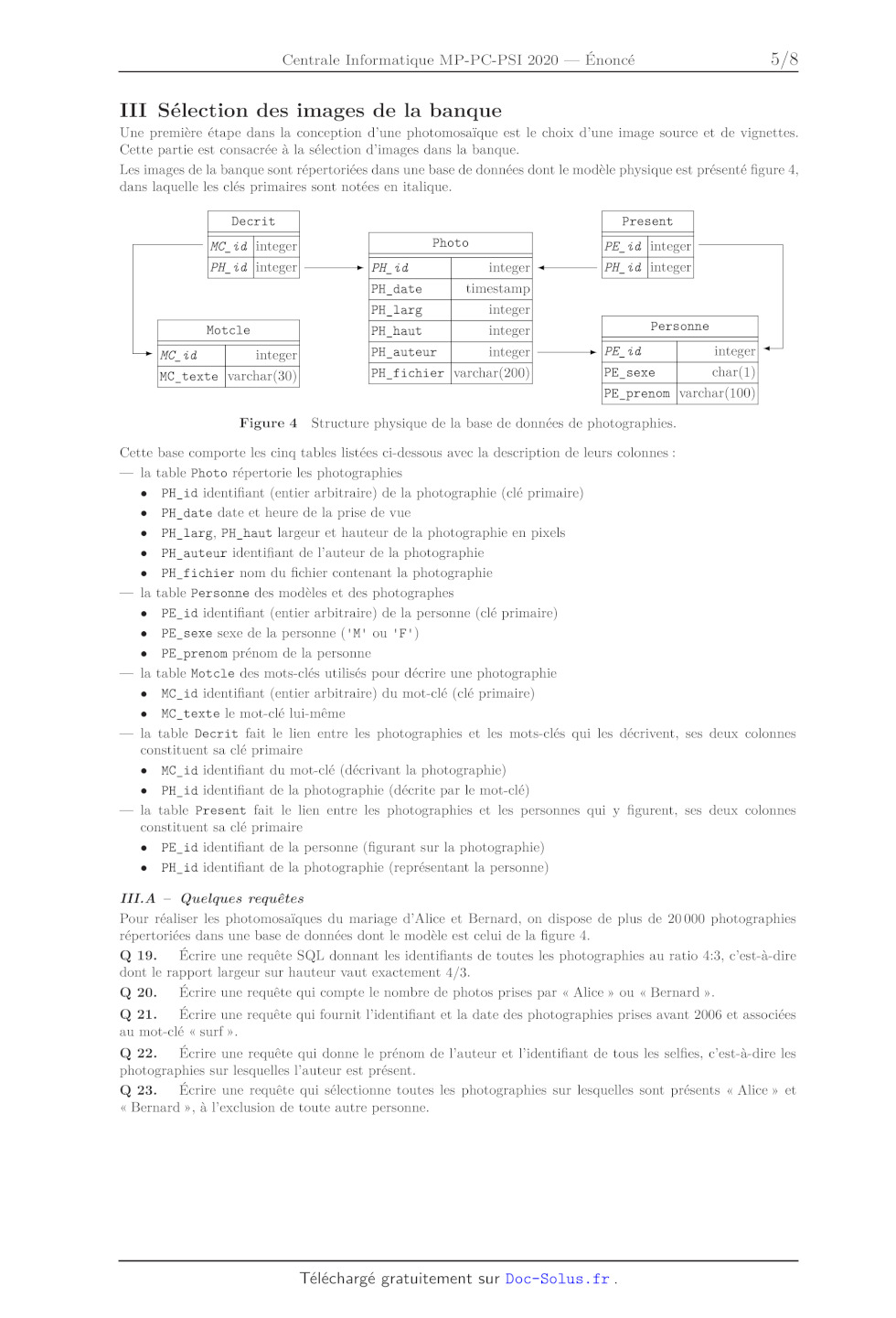
Les images de la banque sont répertoriées dans une base de données dont le
modèle physique est présenté figure 4,
dans laquelle les clés primaires sont notées en italique.
Decrit Present
MC_id linteger Photo PE_1id |integer
PH_ id |integer| --------+ |PH id integer| <-------- \PH_ id |integer PH_date timestamp PH_larg integer Motcle PH_haut integer Personne --+ |MC_ id integer PH_auteur integer| --------+ |PE_ id integer| MC_texte |[varchar(30) PH_fichier |varchar(200) PE_sexe char(1) PE_prenom |varchar(100) Figure 4 Structure physique de la base de données de photographies. Cette base comporte les cinq tables listées ci-dessous avec la description de leurs colonnes : -- Ja table Photo répertorie les photographies e PH_id identifiant (entier arbitraire) de la photographie (clé primaire) e PH_date date ct heure de la prise de vue e PH_larg, PH haut largeur et hauteur de la photographie en pixels e PH_auteur identifiant de l'auteur de la photographie e PH_ fichier nom du fichier contenant la photographie -- la table Personne des modèles et des photographes e PE_id identifiant (entier arbitraire) de la personne (clé primaire) e PE_sexe sexe de la personne ('M' ou 'F') e PE_prenom prénom de la personne -- Ja table Motcle des mots-clés utilisés pour décrire une photographie e MC_id identifiant (entier arbitraire) du mot-clé (clé primaire) e MC texte le mot-clé lui-même -- Ja table Decrit fait le lien entre les photographies et les mots-clés qui les décrivent, ses deux colonnes constituent sa clé primaire e MC_id identifiant du mot-clé (décrivant la photographie) e PH_id identifiant de la photographie (décrite par le mot-clé) -- Ja table Present fait le lien entre les photographies et les personnes qui y figurent, ses deux colonnes constituent sa clé primaire e PE_id identifiant de la personne (figurant sur la photographie) e PH_id identifiant de la photographie (représentant la personne) TITI. À -- Quelques requêtes Pour réaliser les photomosaïques du mariage d'Alice et Bernard, on dispose de plus de 20 000 photographies répertoriées dans une base de données dont le modèle est celui de la figure 4. Q 19. Écrire une requête SQL donnant les identifiants de toutes les photographies au ratio 4:3. c'est-à-dire dont le rapport largeur sur hauteur vaut exactement 4/3. Q 20. Écrire une requête qui compte le nombre de photos prises par « Alice » ou « Bernard ». Q 21. Écrire une requête qui fournit l'identifiant et la date des photographies prises avant 2006 et associées au mot-clé « surf ». Q 22. Écrire une requête qui donne le prénom de l'auteur et l'identifiant de tous les selfies, c'est-à-dire les photographies sur lesquelles l'auteur est présent. Q 23. Écrire une requête qui sélectionne toutes les photographies sur lesquelles sont présents « Alice » et « Bernard », à l'exclusion de toute autre personne. 2020-05-13 12:49:13 Page 5/8 C)EXETS ITI.B --- Internationalisation des mots-clés Afin de partager et d'enrichir la banque d'images, il a été décidé de faire évoluer la structure de la base de données afin de gérer les mots-clés dans différentes langues. Le cahier des charges de cette évolution stipule : a. l'ensemble des photographies sélectionnées à l'aide de mots-clés ne doit pas dépendre de la langue utilisée pour exprimer ces mots-clés ; autrement dit, les photographies décrites par le mot-clé « montagne » exprimé en français doivent être les mêmes que celles sélectionnées par les mots-clés « mountain » si la langue choisie est l'anglais, « Berg » pour l'allemand, « montaña » pour l'espagnol, etc. : b. il doit être possible, pour cette nouvelle base de données, d'écrire une requête de recherche de photographies par mot-clef en spécifiant la langue utilisée pour exprimer le mot-clé de telle sorte que changer de langue se fasse en modifiant uniquement des constantes dans la clause WHERE. Q 24. Proposer un nouveau modèle de base de données répondant à cette évolution du cahier des charges en ne détaillant que ce qui change (tables modifiées, nouvelles tables). Q 25. Avec cette nouvelle base de données, écrire une requête qui permet de sélectionner les identifiants des photographies associées au mot-clé « mountain » exprimé en anglais. IV Placement des vignettes IV.A - Préparatifs On envisage ici le cas où la photomosaïque est homothétique de l'image source et constituée de p vignettes de haut sur p vignettes de large. Le nombre total de vignettes est donc r = p*. Q 26. Écrire une fonction d'entête def initMosaïque(source:image, w:int, h:int, p:int) -> image:
qui prend en paramètre l'image source, les dimensions w et h d'une vignette et
le nombre p de vignettes par
coté. Cette fonction renvoie une version redimensionnée de source, de même
taille que la photomosaïque finale.
On rappelle qu'il est possible d'utiliser les fonctions définies précédemment.
On appelle désormais pavé chaque zone de cette image source redimensionnée, de
taille w x h, qui doit être
remplacé par une vignette. Afin de comparer les vignettes et les pavés, on
définit la distance L, entre deux
images a et b de même taille w X À par :
Li(a,b) = D la(i,j) --6(, j)|.
O int:
qui calcule la distance L, entre deux images de même taille, en prenant garde
aux dépassements de capacité.
Q 28. Écrire une fonction d'entête
def choixVignette(pavé:image, vignettes:/[imagel]) -> int:
qui prend en paramèêtre une image correspondant à un pavé et une liste de
vignettes et qui renvoie l'indice i
tel que Li(pavé, vignettes[i]) est minimal (ou l'un d'entre eux si plusieurs
vignettes conviennent). Cette
fonction ne doit pas modifier la liste des vignettes.
IV.B - Méthode sans restriction du choix des vignettes
Q 29. Écrire, à l'aide de ce qui précède, une fonction d'entête
def construireMosaïque(source:image, vignettes:[imagel, p:int) -> image:
qui construit une photomosaïque homothétique de source comportant p vignettes
par côté.
Q 30. Déterminer sa complexité temporelle asymptotique en fonction de la taille
n -- hw des vignettes, du
nombre r de vignettes dans la mosaique et de la longueur q de la liste
vignettes.
IV.C - Améliorations
Cette sous-partie demande de l'initiative de la part du candidat, qui peut être
amené à définir de nouvelles
variables, structures de données et fonctions. Il est demandé d'expliciter
clairement la démarche utilisée, de
préciser le rôle de chaque nouvelle fonction et variable introduite et de les
illustrer, le cas échéant, par un
schéma. Toute démarche pertinente, même non aboutie, sera valorisée. Le barème
prend en compte le temps
nécessaire à la résolution de cette sous-partie.
La méthode sans restriction proposée précédemment peut conduire à sélectionner
répétitivement les mêmes
vignettes et à mal les répartir. En particulier, une plage uniforme de l'image
source conduit à l'accumulation de
la même vignette dans cette zone de la photomosaïque.
2020-05-13 12:49:13 Page 6/8 CIEL
Q 31. Proposer une stratégie de construction de photomosaïque permettant de
sélectionner un maximum
de vignettes différentes et, au cas où une vignette serait réutilisée, d'éviter
que les différentes apparitions de la
même vignette se retrouvent trop proches.
Q 32. [Implanter cette stratégie sous la forme d'une fonction belleMosaïque,
version améliorée de la fonction
construireMosaïque, dont on définira les éventuels paramètres supplémentaires.
Opérations et fonctions disponibles en Python et SQL
Fonctions Python diverses
-- range (n) itérateur sur les n premiers entiers (]0,n -- 1|).
list(range(5)) -- [0, 1, 2, 3, 4].
-- range(d, f, p) où d, f et p sont des entiers, itérateur sur les entiers (r;
= d+ip|r,; < f);en si p > 0 et
(r, = d+iplr, > fh;en si p < 0. Le paramètre p est optionnel avec une valeur par défaut de 1. list(range(1, 5)) -- [1, 2, 3, 4]: list(range(20, 10, -2)) -- [20, 18, 16, 14, 12]. -- s[d:f:pl où s est une séquence et d, £ et p sont des entiers, désigne la séquence des éléments de s dont les indices correspondent à range(d, f, p). Si s est d'un type de base (liste ou tuple), s[d:f:pl effectue une copie, si s est un tableau numpy, s[d:f:pl est une vue sur les éléments de s et peut être utilisé pour modifier s. [LO, 1, 2, 3, 4, 5]12:6:2] -- [2, 4]: (0, 1, 2, 3, 4, 5)[5:2:-2] -- (5, 3). -- random.randrange(a, b) renvoie un entier aléatoire compris entre a et b-1 inclus (a ct b enticrs). -- random.random() renvoie un nombre flottant tiré aléatoirement dans [0, 1| suivant une distribution uniforme. -- random.choice(s) renvoie un élément pris au hasard dans la séquence non vide s. -- random.shuffle(L) permute aléatoirement les éléments de la liste L (modifie L). -- random.sample(s, n) renvoie une liste constituée de n éléments distincts de la séquence s choisis aléatoi- rement, si n < len(s) lève l'exception ValueError. -- math.sqrt(x) calcule la racine carrée du nombre x. -- round(n) arrondit le nombre n à l'entier le plus proche. Le résultat est de type int pour les types numériques de base. Pour les types de la bibliothèque numpy, le résultat a le même type que l'argument. -- math.floor(x) renvoie le plus grand entier inférieur ou égal à x. -- math.ceil(x) renvoie le plus petit entier supérieur ou égal à x. Opérations sur les listes -- len(L) donne le nombre d'éléments de la liste L. -- Li + L2 construit une liste constituée de la concaténation des listes L1 et L2. -- n * L construit une liste constituée de la liste L concaténée n fois avec elle-même. -- e in Let e not in L déterminent si l'objet e figure dans la liste L. Cette opération a une complexité temporelle en O(l1en(L)). 2 in [1, 2, 3] -- True; 2 not in [1, 2, 3] -- False. -- L.append(e) ajoute l'élément e à la fin de la liste L. -- L.pop(i) : renvoie l'élément à l'indice i de la liste L et le supprime de la liste. -- L.remove(e) supprime de la liste L le premier élément qui a pour valeur e, s'il existe. Cette opération a une complexité temporelle en O(1en(L)). -- L.insert(i, e) insère l'élément e à la position d'indice i dans la liste L (en décalant les éléments suivants) : sii >= len(L),e est ajouté en fin de liste.
-- L.sort() trie en place la liste L (qui est donc modifiée) en réordonnant ses
éléments dans l'ordre croissant.
Opérations sur les tableaux (np .ndarray)
-- np.array(s, dtype) crée un nouveau tableau contenant les éléments de la
séquence s. La taille de ce
tableau est déduite du contenu de s. Le paramètre dtype précise le type des
éléments du tableau créé.
-- np.empty(n, dtype), np.empty((n, m), dtype) crée respectivement un tableau à
une dimension de n
éléments et un tableau à n lignes et m colonnes dont les éléments, de valeurs
indéterminées, sont de type
dtype. Si le paramètre dtype n'est pas précisé, il prend la valeur float.
-- np.zeros(n, dtype), np.zeros((n, m), dtype) fonctionne comme np.empty en
initialisant chaque élé-
ment à la valeur zéro pour les types numériques ou False pour les types
booléens.
-- np.full(n, v, dtype),np.full((n, m), v, dtype) fonctionne comme np.empty en
initialisant chaque
élément à la valeur v.
-- a.ndim nombre de dimensions du tableau a.
2020-05-13 12:49:13 Page 7/8 CIEL
-- a.shape tuple donnant la taille du tableau a pour chacune de ses dimensions.
-- len(a) taille du tableau a dans sa première dimension, équivalent à
a.shapeT[O].
-- a.size nombre total d'éléments du tableau a.
-- a.dtype type des éléments du tableau a.
-- a.flat itérateur sur tous les éléments du tableau a.
-- np.ndenumerate(a) itérateur sur tous les couples (ind, v) du tableau a où
ind est un tuple de a.ndim
entiers donnant les indices de l'élément v.
-- a.min(), a.max() renvoie la valeur du plus petit (respectivement plus grand)
élément du tableau a ; ces
opérations ont une complexité temporelle en O(a.size).
-- a.sum() ou np.sum(a) calcule la somme de tous les éléments du tableau a ;
cette opération a une complexité
temporelle en O(a.size).
-- a.sum(d) ounp.sum(a, d) effectue la somme des éléments du tableau a suivant
la dimension d ; le résultat
est un nouveau tableau avec une dimension de moins que a.
a.sum(0) -- somme par ligne, a.sum(1) -- somme par colonne, etc.
-- a.mean() ou np.mean(a) renvoie la valeur moyenne de tous les éléments du
tableau à : le résultat est de
type np.float64. Cette opération a une complexité temporelle en O(a.size).
-- a.mean(d) ou np.mean(a, d) effectue la moyenne des éléments du tableau a
suivant la dimension d:; le
résultat est un nouveau tableau avec une dimension de moins que a.
a.mean(0) -- moyenne par ligne, a.mean(1) -- moyenne par colonne, etc.
-- a.round(),np.around(a) crée un nouveau tableau de même forme et type que a
en arrondissant ses éléments
à l'entier le plus proche.
SQL
-- T1 JOIN T2 USING (ci, c2, ...) joint les deux tables T1 et T2 sur les
colonnes ci, c2. qui doivent exister
dans les deux tables : équivalent à T1 JOIN T2 ON Ti.ci = T2.c1 AND Ti.c2 =
T2.c2 AND ..., sauf que
les colonnes c1, c2. n'apparaissent qu'une fois dans le résultat.
-- Les requêtes
e (SELECT ... FROM ... WHERE ...) INTERSECT (SELECT ... FROM ... WHERE ...)
e (SELECT ... FROM ... WHERE .....) UNION (SELECT ... FROM ... WHERE
e (SELECT ... FROM ... WHERE .....) EXCEPT (SELECT ... FROM ... WHERE ...)
sélectionnent respectivement l'intersection, l'union et la différence des
résultats des deux requêtes, qui doivent
être compatibles : même nombre de colonnes et mêmes types.
-- EXTRACT (part FROM t) extrait un élément de +, expression de type date,
time, timestamp (jour ct heure)
où interval (durée). part peut prendre les valeurs year, month, day (jour dans
le mois), doy (jour dans
l'année), dow (jour de la semaine), hour, etc.
-- Les fonctions d'agrégation SUM(e), AVG(e), MAX(e), MIN(e), COUNT(e),
COUNT(*) calculent respectivement
la somme, la moyenne arithmétique, le maximum, le minium, le nombre de valeurs
non nulles de l'expression
e ct le nombre de lignes pour chaque groupe de lignes défini par la cause GROUP
BY. Si la requête ne comporte
pas de clause GROUP BY le calcul est effectué pour l'ensemble des lignes
sélectionnées par la requête.
ee eFINee.e
2020-05-13 12:49:13 Page 8/8 CIEL