
X Physique et Sciences de l'ingénieur MP 2025
| Thème de l'épreuve | Exosquelette actif. Instabilité d'ondulation d'une couche de cristal liquide. |
| Principaux outils utilisés | mécanique du point, théorème de l'énergie cinétique, asservissements (structure et correction) |
| Mots clefs | ressorts, déformations, cristal liquide, exosquelette, système 3 barres |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2025
MARDI 15 AVRIL 2025
14h00 18h00
FILIÈRE MP Épreuve no 4
PHYSIQUE ET SCIENCES
DE L'INGÉNIEUR (X)
Durée : 4 heures
L'utilisation de calculatrices n'est pas autorisée pour cette épreuve.
Cette composition ne concerne qu'une partie des candidats de la filière MP. Les
autres candidats effectuent parallèlement la composition d'informatique A.
Pour la filière MP, il y a donc deux enveloppes de sujets, pour cette séance.
Cette épreuve comprend deux parties indépendantes. La première partie, dédiée
aux sciences de l'ingénieur,
propose une étude d'un exosquelette actif. La seconde, consacrée à la physique,
s'intéresse à l'analyse de
deux instabilités mécaniques présentant des similarités.
© Il est conseillé de ne pas consacrer plus de deux heures par partie.
5
© Les applications numériques seront effectuées avec la précision qu'un calcul
à la main permet aisément, et
sans excéder deux chiffres significatifs. Les ordres de grandeur seront donnés
avec un seul chiffre significatif.
© Les réponses aux questions relevant de considérations qualitatives devront
être systématiquement argumentées.
© Les références des questions abordées devront être indiquées de façon claire.
Partie Sciences de l'ingénieur
10
15
Exosquelette actif
Présentation.
Un exosquelette est une machine permettant à un humain de réaliser des actions
en assistant ses mouvements. Les exosquelettes se présentent comme des
dispositifs possédant des éléments rigides articulés entre
eux dont l'architecture mécanique reproduit, avec une certaine fidélité, celle
du squelette humain. Il existe
deux grandes catégories d'exosquelettes : les exosquelettes actionnés, ou
actifs, équipés de moteurs capables
de fournir des efforts et les exosquelettes non-actionnés, ou passifs, qui
utilisent des structures de type ressort
qui permettent de stocker et de restituer de l'énergie.
Dans ce sujet, on étudie l'exosquelette de
bras ABLE développé depuis plusieurs années par le CEA LIST. Cet exosquelette a
été utilisé récemment dans le cadre d'un
projet européen visant à améliorer l'expérience de rééducation des patients
victimes
d'un AVC.
L'exosquelette ABLE existe en plusieurs
versions (1D, 4D, 7D) selon le nombre de
degrés de liberté offerts (un exemple est
donné sur la figure (1)). La figure (2) est
une photographie de l'exosquelette ABLE
1D où sont définis les éléments qui le constituent.
On ne s'intéressera qu'au seul degré de liberté de flexion/extension du coude,
le bras
étant fixe et vertical.
Figure 1 Utilisation de deux robots ABLE-7D dans
le cadre du projet européen.
Page 1/15
20
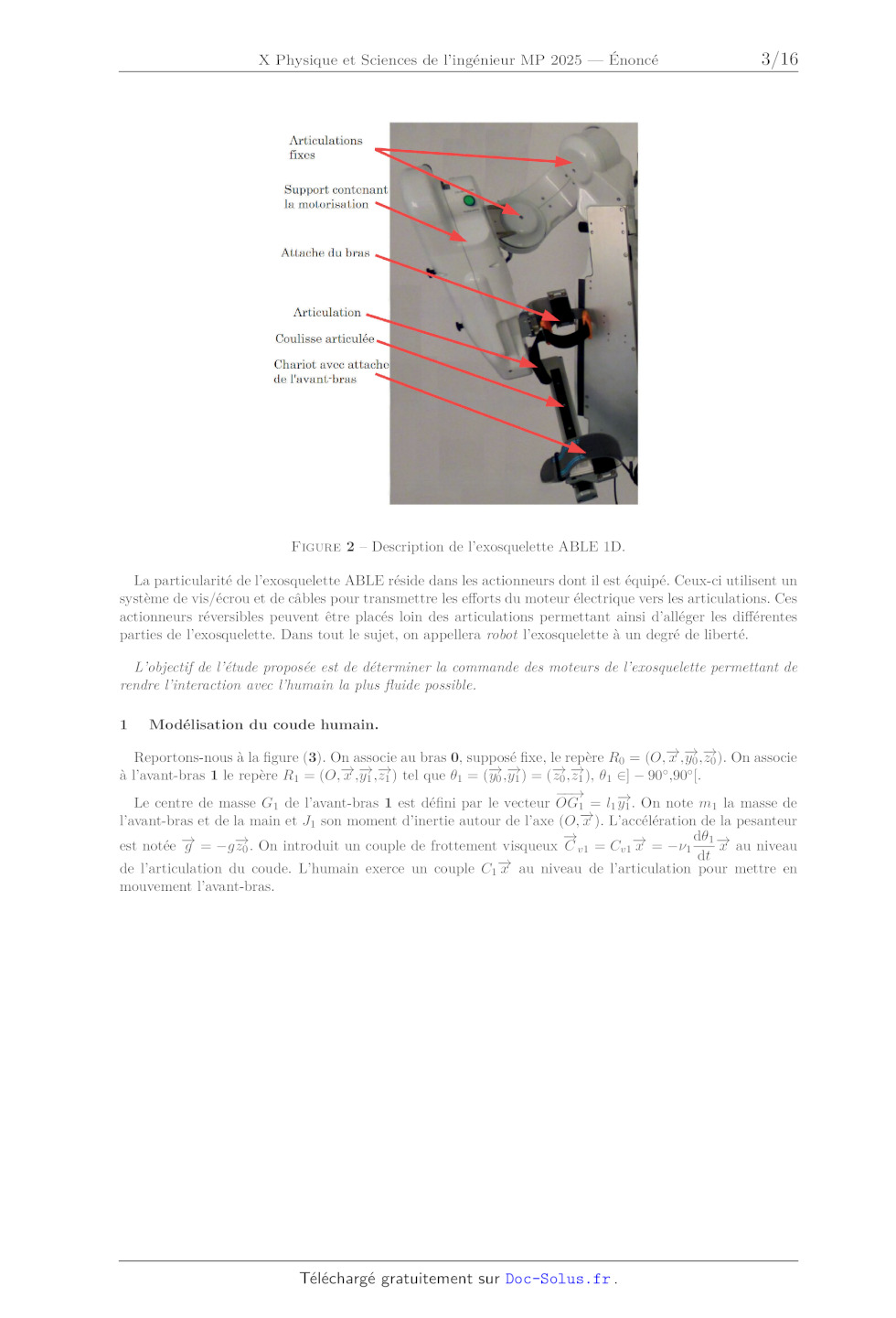
Figure 2 Description de l'exosquelette ABLE 1D.
La particularité de l'exosquelette ABLE réside dans les actionneurs dont il est
équipé. Ceux-ci utilisent un
système de vis/écrou et de câbles pour transmettre les efforts du moteur
électrique vers les articulations. Ces
actionneurs réversibles peuvent être placés loin des articulations permettant
ainsi d'alléger les différentes
parties de l'exosquelette. Dans tout le sujet, on appellera robot
l'exosquelette à un degré de liberté.
25
L'objectif de l'étude proposée est de déterminer la commande des moteurs de
l'exosquelette permettant de
rendre l'interaction avec l'humain la plus fluide possible.
1
30
Modélisation du coude humain.
-
-
-
x ,
y0 ,
z0 ). On associe
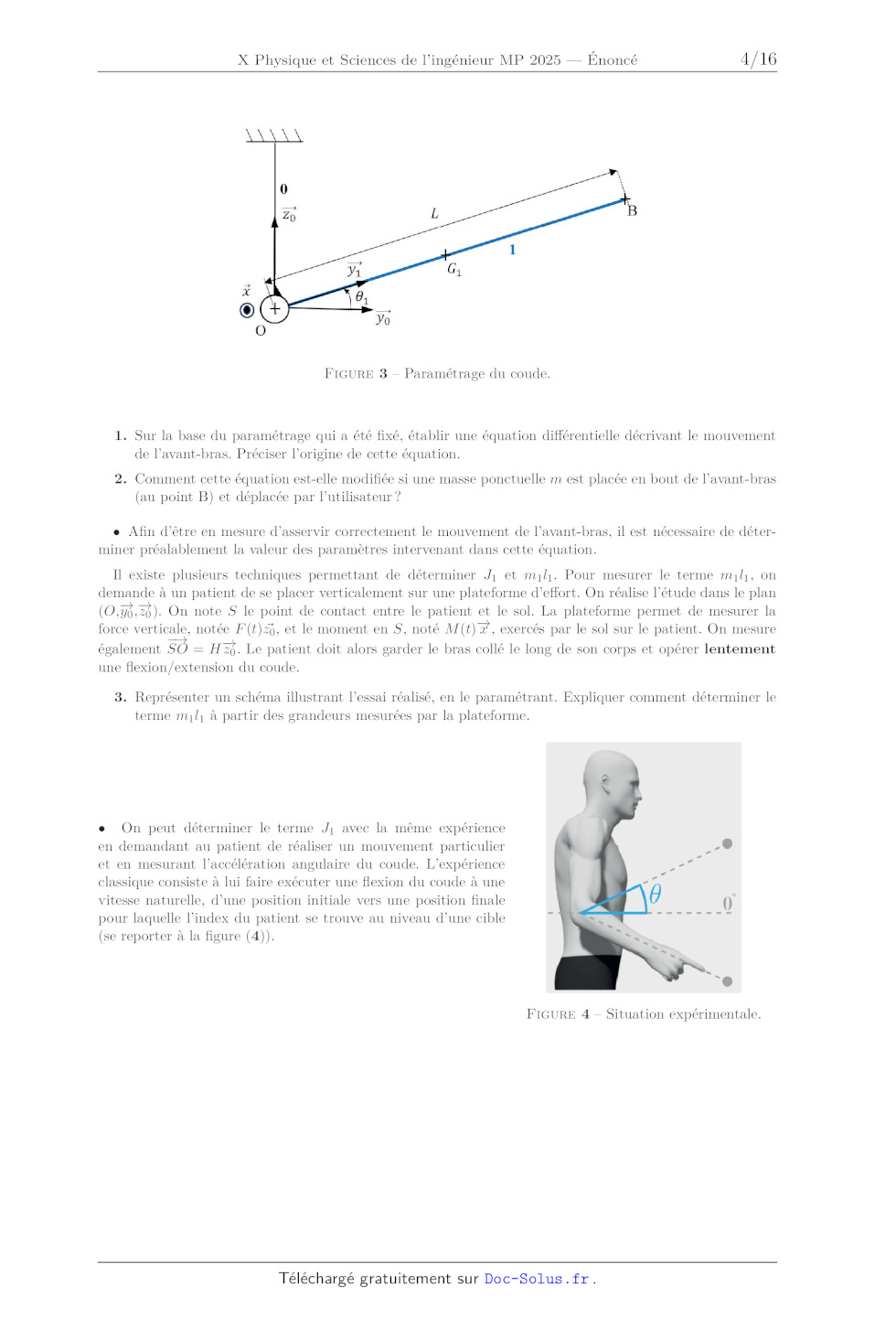
Reportons-nous à la figure (3). On associe au bras 0, supposé fixe, le repère
R0 = (O,
-
-
-
-
-
-
-
à l'avant-bras 1 le repère R1 = (O, x , y1 , z1 ) tel que 1 = ( y0 , y1 ) = (
z0 , z1 ), 1 ] - 90 ,90 [.
--
-
Le centre de masse G1 de l'avant-bras 1 est défini par le vecteur OG1 = l1
y1 . On note m1 la masse de
-
l'avant-bras et de la main et J1 son moment d'inertie autour de l'axe (O, x ).
L'accélération de la pesanteur
-
d1
-
-
-
-
est notée
g = -g
z0 . On introduit un couple de frottement visqueux C v1 = Cv1
x au niveau
x = -1
dt
-
de l'articulation du coude. L'humain exerce un couple C1 x au niveau de
l'articulation pour mettre en
mouvement l'avant-bras.
Page 2/15
Figure 3 Paramétrage du coude.
35
1. Sur la base du paramétrage qui a été fixé, établir une équation
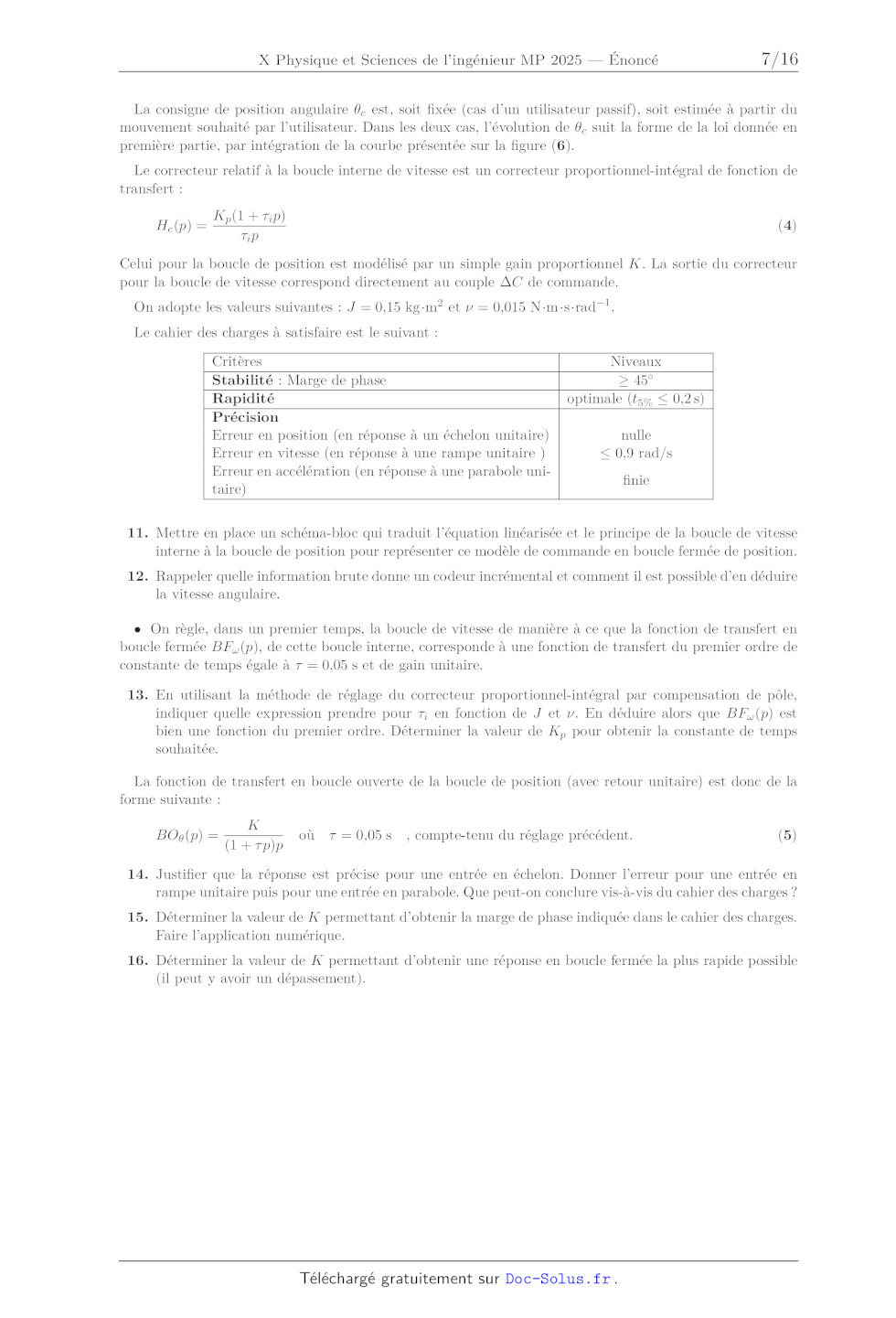
différentielle décrivant le mouvement
de l'avant-bras. Préciser l'origine de cette équation.
2. Comment cette équation est-elle modifiée si une masse ponctuelle m est
placée en bout de l'avant-bras
(au point B) et déplacée par l'utilisateur ?
40
45
· Afin d'être en mesure d'asservir correctement le mouvement de l'avant-bras,
il est nécessaire de déterminer préalablement la valeur des paramètres
intervenant dans cette équation.
Il existe plusieurs techniques permettant de déterminer J1 et m1 l1 . Pour
mesurer le terme m1 l1 , on
demande à un patient de se placer verticalement sur une plateforme d'effort. On
réalise l'étude dans le plan
-
-
z0 ). On note S le point de contact entre le patient et le sol. La plateforme
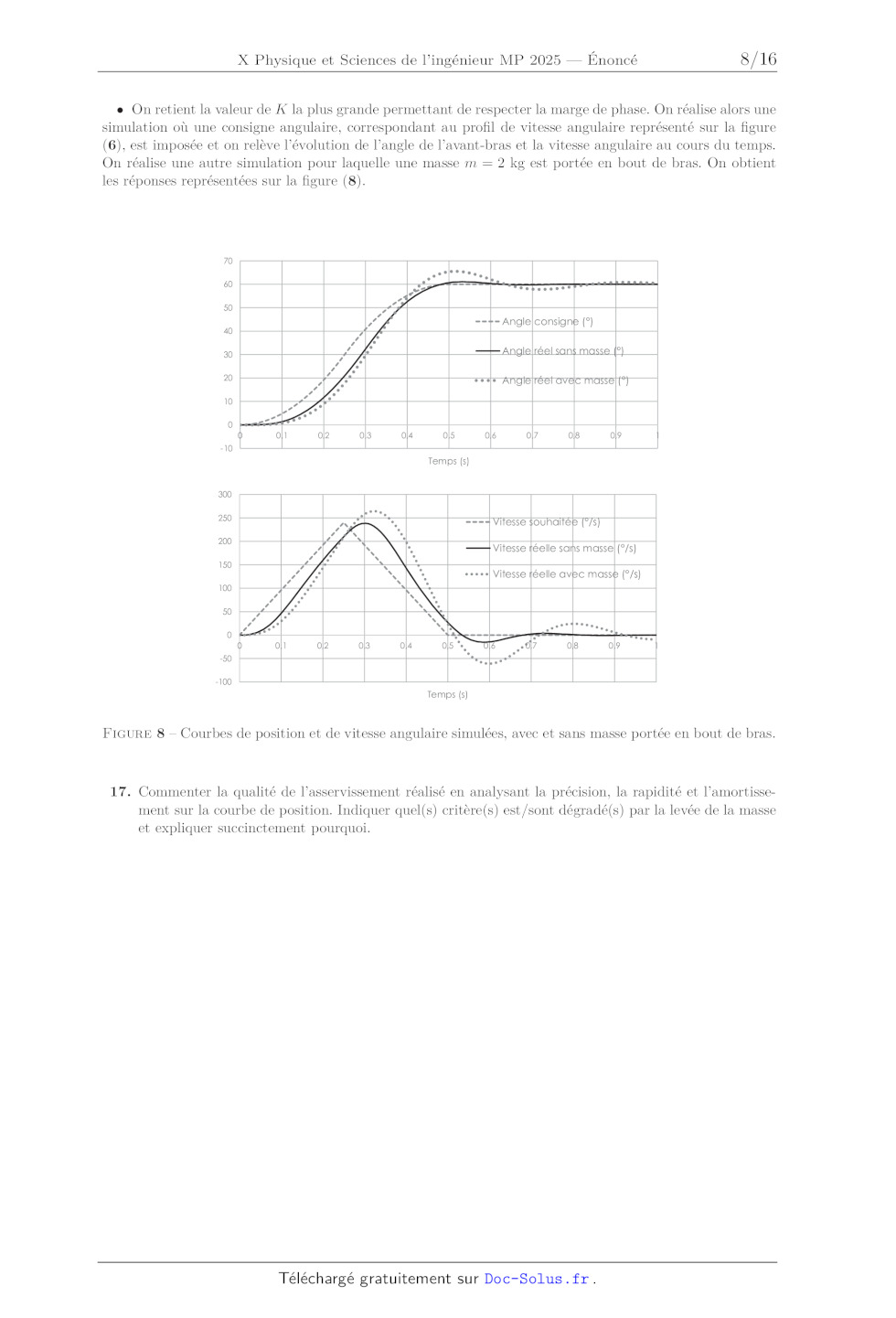
permet de mesurer la
(O,
y0 ,
-
x , exercés par le sol sur le patient. On mesure
force verticale, notée F (t)z0 , et le moment en S, noté M (t)
-
-
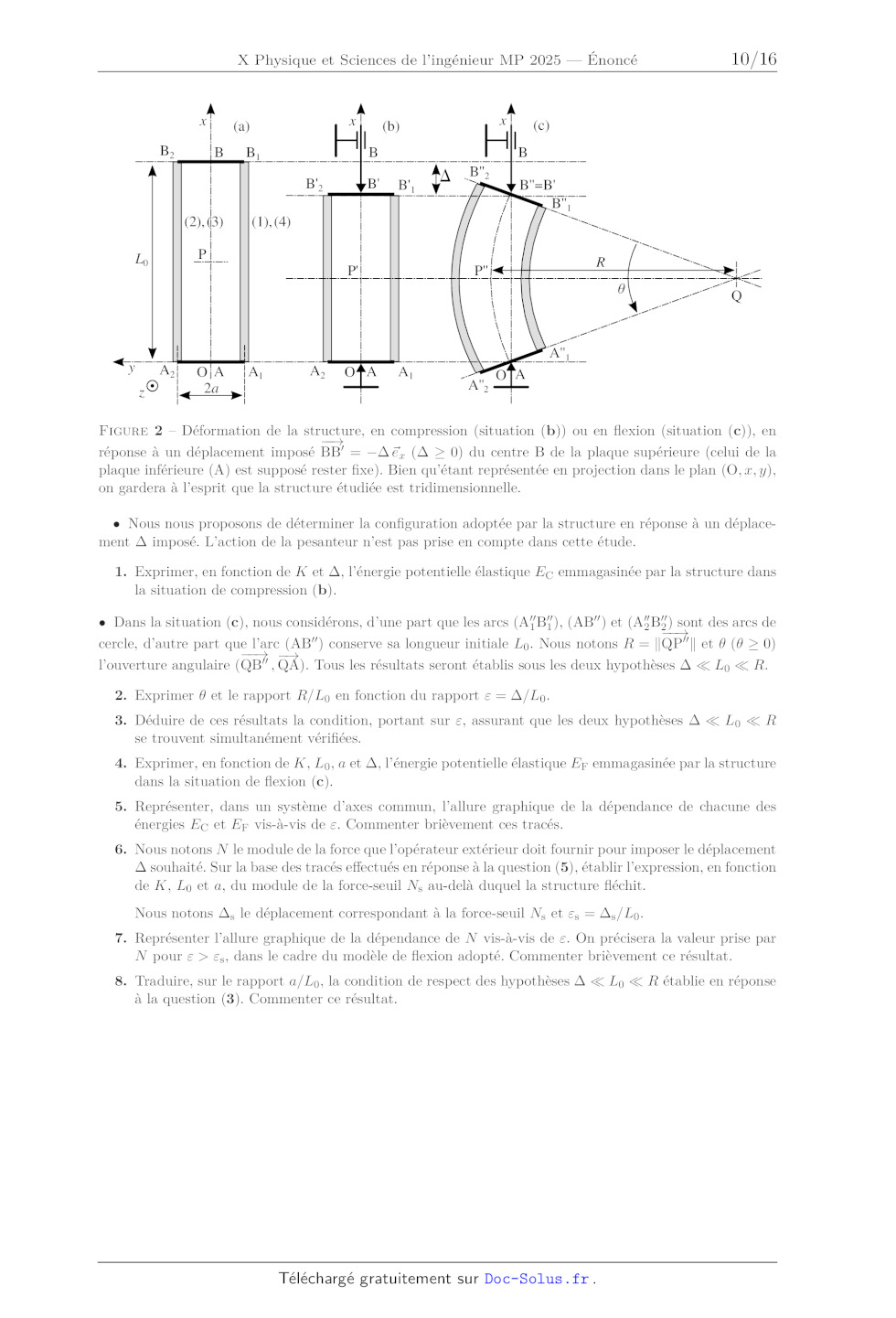
également SO = H z0 . Le patient doit alors garder le bras collé le long de son
corps et opérer lentement
une flexion/extension du coude.
3. Représenter un schéma illustrant l'essai réalisé, en le paramétrant.
Expliquer comment déterminer le
terme m1 l1 à partir des grandeurs mesurées par la plateforme.
· On peut déterminer le terme J1 avec la même expérience
en demandant au patient de réaliser un mouvement particulier
et en mesurant l'accélération angulaire du coude. L'expérience
classique consiste à lui faire exécuter une flexion du coude à une
vitesse naturelle, d'une position initiale vers une position finale
pour laquelle l'index du patient se trouve au niveau d'une cible
(se reporter à la figure (4)).
Figure 4 Situation expérimentale.
Page 3/15
La figure (5) donne un exemple de courbe de vitesse angulaire obtenue au cours
de cette expérience.
Figure 5 Dépendance de la vitesse angulaire 1 vis-à-vis du temps, pour une
expérience type.
50
Il est nécessaire de modéliser le mouvement de l'avant-bras
en vue de pouvoir reproduire cette expérience avec l'exosquelette et d'analyser
différents pilotages. Le profil de vitesse angulaire quasi symétrique de la
figure (5) est approché par une loi triangulaire, comme le représente la figure
(6). La vitesse angulaire maximale est notée max et l'avantbras évolue de la
position initiale -0 à la position finale
0 , en un temps T .
1
max
0
T/2
T
t
Figure 6 Profil de vitesse angulaire adopté.
4. Déterminer une relation entre 0 , max et T . En déduire la valeur de la
vitesse angulaire maximale
max en /s, pour 0 = 30 et T = 0,5 s.
2
55
Modélisation de l'interaction robot-humain.
Sans défaut de positionnement, l'exosquelette serait confondu avec le coude et
la motorisation de l'articulation de l'exosquelette reviendrait à agir
directement sur la flexion/extension du coude.
Il est nécessaire de mettre en place une cinématique particulière entre
l'exosquelette et l'avant-bras pour
permettre le mouvement et éviter tout problème de contrainte.
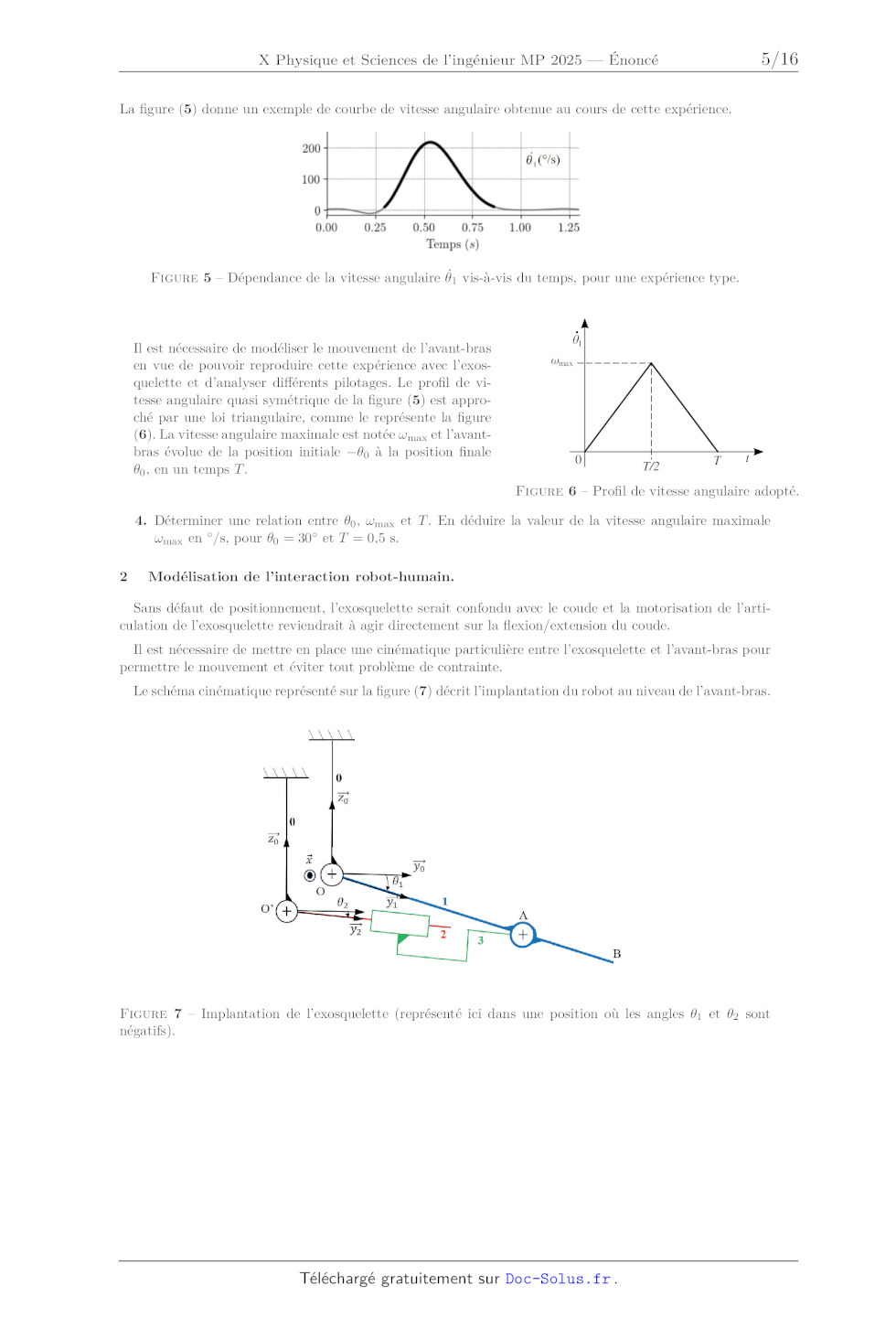
Le schéma cinématique représenté sur la figure (7) décrit l'implantation du
robot au niveau de l'avant-bras.
60
Figure 7 Implantation de l'exosquelette (représenté ici dans une position où
les angles 1 et 2 sont
négatifs).
Page 4/15
65
--
-
-
Le bâti du robot est associé au bras 0. On définit le point O par la relation
OO = -d (cos
y0 + sin
z0 ),
-
-
-
où d > 0 et = ( y0 ,O O) tel que 0 < < /2 dans la configuration décrite par la figure (7). On associe - - - x , y2 , z2 ) au solide 2 mis en mouvement par la motorisation. Ce solide est en rotation le repère R2 = (O , - - - - - x ) par rapport au solide 0 d'un angle 2 = ( y0 , y2 ) = ( z0 , z2 ), 2 ] - 90 ,90 [. Le solide autour de l'axe (O , - 3 est composé d'une glissière, de direction y2 et d'une tige reliant ce solide à l'avant-bras 1 par la liaison -- - - - y1 et O A = pivot située en A. En posant OA = L1 y2 , on introduit la distance constante L1 = OA et la distance variable = O A. 5. Déterminer une relation entre 1 et 2 , fonction de d, L1 et . 6. En pratique, d L1 . Montrer alors que 2 1 . 70 Dans toute la suite du problème nous nous placerons dans la situation telle que d L1 . Nous considérerons alors que 1 = 2 , angle que nous noterons simplement . · Le moteur de l'exosquelette doit permettre de mettre en mouvement l'avant-bras et d'assurer toute la chaîne cinématique. C'est pourquoi il est nécessaire de modifier l'équation de mouvement établie initialement pour tenir compte de l'exosquelette. 75 80 On conserve le paramétrage défini dans la première partie et on ajoute les paramètres cinétiques de - l'exosquelette. On note J2 le moment d'inertie du solide 2 autour de l'axe (O , x ), m2 la masse du solide 2 --- - et G2 son centre de masse tel que O G2 = l2 y2 . On suppose négligeables la masse et l'inertie du solide 3. Le - moteur exerce un couple C2 x sur le solide 2. On introduit un coefficient de frottement fluide 2 relatif à la - liaison pivot 2/0. L'action des frottements secs sur cette liaison est modélisée par un couple -Cs x supposé constant. Les autres liaisons sont supposées énergétiquement parfaites. 7. Déterminer la puissance des efforts extérieurs et la puissance intérieure, en précisant les différents termes qui interviennent. 8. Déterminer l'énergie cinétique de l'ensemble en mouvement. 9. Montrer, en précisant le théorème utilisé et le système étudié, que l'équation de mouvement obtenue prend la forme suivante : 85 J + + f () = C1 + C2 - Cs (3) On donnera l'expression des paramètres J et , et de la fonction f . 90 · Le moteur à courant continu de l'articulation du coude est piloté en courant de telle sorte que c'est directement le couple C2 qui est contrôlé. Pour établir un modèle de commande de l'exosquelette, il est nécessaire de disposer d'une relation linéaire. Pour cela, on s'intéresse aux variations d'angle autour de la position 0 (des variations de ±30 restent acceptables). On note C2 = C0 + C le couple appliqué par le moteur où C0 est le couple d'équilibre et C son écart à la valeur d'équilibre. On suppose ici que C1 = 0. 10. Déterminer la relation linéaire reliant et C. Préciser l'expression de C0 . 3 95 100 Pilotage en boucle fermée de position. Nous avons mentionné, dans la partie introductive, quelles étaient les deux situations d'utilisation d'un exosquelette. Dans un cas, l'utilisateur est passif (i.e. il ne fournit pas d'effort). Les propriétés mécaniques (raideur, inertie, amortissement) de son avant-bras doivent être prises en compte dans la commande. Ce sont les exosquelettes d'assistance complète, dans le cas de rééducation notamment. Dans l'autre situation, l'utilisateur est actif. Ses actions doivent être prises en compte dans la commande comme un contrôle volontaire. La commande classique utilisée consiste à réaliser un asservissement de position de l'exosquelette incluant un asservissement de vitesse. L'angle est mesuré par un capteur (un codeur incrémental) de gain unitaire. La vitesse angulaire = d/dt est calculée à partir du signal mesuré par le codeur incrémental. Page 5/15 105 La consigne de position angulaire c est, soit fixée (cas d'un utilisateur passif), soit estimée à partir du mouvement souhaité par l'utilisateur. Dans les deux cas, l'évolution de c suit la forme de la loi donnée en première partie, par intégration de la courbe présentée sur la figure (6). Le correcteur relatif à la boucle interne de vitesse est un correcteur proportionnel-intégral de fonction de transfert : Hc (p) = Kp (1 + i p) i p (4) Celui pour la boucle de position est modélisé par un simple gain proportionnel K. La sortie du correcteur pour la boucle de vitesse correspond directement au couple C de commande. 110 On adopte les valeurs suivantes : J = 0,15 kg·m2 et = 0,015 N·m·s·rad-1 . Le cahier des charges à satisfaire est le suivant : Critères Stabilité : Marge de phase Rapidité Précision Erreur en position (en réponse à un échelon unitaire) Erreur en vitesse (en réponse à une rampe unitaire ) Erreur en accélération (en réponse à une parabole unitaire) Niveaux 45 optimale (t5% 0,2 s) nulle 0,9 rad/s finie 11. Mettre en place un schéma-bloc qui traduit l'équation linéarisée et le principe de la boucle de vitesse interne à la boucle de position pour représenter ce modèle de commande en boucle fermée de position. 115 12. Rappeler quelle information brute donne un codeur incrémental et comment il est possible d'en déduire la vitesse angulaire. · On règle, dans un premier temps, la boucle de vitesse de manière à ce que la fonction de transfert en boucle fermée BF (p), de cette boucle interne, corresponde à une fonction de transfert du premier ordre de constante de temps égale à = 0,05 s et de gain unitaire. 120 125 13. En utilisant la méthode de réglage du correcteur proportionnel-intégral par compensation de pôle, indiquer quelle expression prendre pour i en fonction de J et . En déduire alors que BF (p) est bien une fonction du premier ordre. Déterminer la valeur de Kp pour obtenir la constante de temps souhaitée. La fonction de transfert en boucle ouverte de la boucle de position (avec retour unitaire) est donc de la forme suivante : BO (p) = K (1 + p)p où = 0,05 s , compte-tenu du réglage précédent. (5) 14. Justifier que la réponse est précise pour une entrée en échelon. Donner l'erreur pour une entrée en rampe unitaire puis pour une entrée en parabole. Que peut-on conclure vis-à-vis du cahier des charges ? 15. Déterminer la valeur de K permettant d'obtenir la marge de phase indiquée dans le cahier des charges. Faire l'application numérique. 130 16. Déterminer la valeur de K permettant d'obtenir une réponse en boucle fermée la plus rapide possible (il peut y avoir un dépassement). Page 6/15 135 · On retient la valeur de K la plus grande permettant de respecter la marge de phase. On réalise alors une simulation où une consigne angulaire, correspondant au profil de vitesse angulaire représenté sur la figure (6), est imposée et on relève l'évolution de l'angle de l'avant-bras et la vitesse angulaire au cours du temps. On réalise une autre simulation pour laquelle une masse m = 2 kg est portée en bout de bras. On obtient les réponses représentées sur la figure (8). 70 60 50 Angle consigne (°) 40 30 Angle réel sans masse (°) 20 Angle réel avec masse (°) 10 0 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 -10 Temps (s) 300 250 Vitesse souhaitée (°/s) 200 Vitesse réelle sans masse (°/s) 150 Vitesse réelle avec masse (°/s) 100 50 0 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 -50 -100 Temps (s) Figure 8 Courbes de position et de vitesse angulaire simulées, avec et sans masse portée en bout de bras. 17. Commenter la qualité de l'asservissement réalisé en analysant la précision, la rapidité et l'amortissement sur la courbe de position. Indiquer quel(s) critère(s) est/sont dégradé(s) par la levée de la masse et expliquer succinctement pourquoi. Page 7/15 Partie Physique 140 Instabilité d'ondulation d'une couche de cristal liquide 145 Cette étude comporte deux parties indépendantes. La première est consacrée à l'analyse du comportement mécanique d'une structure élancée 1 soumise à une compression axiale. La seconde s'intéresse à décrire le comportement d'un film de cristal liquide dont l'épaisseur subit une extension. Dans chacune de ces situations il apparaît que la géométrie de la déformation du système se trouve radicalement modifiée lorsque la sollicitation qui lui est imposée franchit un certain seuil. On parle alors d'instabilité. 1 150 Étude du comportement mécanique d'une structure élancée soumise à une compression. · Nous considérons une structure mécanique modèle formée de quatre ressorts identiques (1), (2), (3) et (4), d'axes parallèles, chacun de raideur K et de longueur sans charge L0 . Leurs extrémités inférieures sont fixées aux angles d'une plaque carrée de coté 2a, supposée indéformable. Leurs extrémités supérieures sont fixées, de la même manière, à une autre plaque, identique à la première. Cette structure, dans sa situation non déformée, que nous adoptons comme référence et qui définit l'origine des énergies, est représentée sur la figure (1). B2 x B B1 Vue de dessus 2a Plaque supérieure (2), (3) (1), (4) Ressort de raideur K L0 y (2) Plaque inférieure y A2 z OA 2a (4) (3) 2a O z (1) A1 Figure 1 Structure mécanique modèle (dans sa situation non déformée de référence) formée de quatre ressorts identiques (1), (2), (3) et (4) de raideur K, de longueur sans charge L0 et d'axe (Ox). Leurs extrémités sont fixées aux angles de deux plaques rigides carrées de côté 2a. 155 160 · Un opérateur extérieur impose un déplacement strictement vertical du centre B de la plaque supérieure par rapport à celui de la plaque inférieure (que nous supposons fixe). Ce déplacement amène le point B au -- point B tel que BB = - ex où 0. En réponse à cette sollicitation, la structure peut simplement se comprimer, en conservant sa géométrie initiale, ou bien fléchir. Ces deux situations sont illustrées sur la figure (2), respectivement en (b) et (c). La situation (a) est celle de référence pour laquelle la structure n'est pas déformée. Les flèches pointant les centres des plaques inférieure et supérieure représentent les éléments extérieurs agissant sur la structure et permettant d'imposer le déplacement . Celui du bas est fixe et celui du haut est guidé en translation selon l'axe (Ox) (la liaison entre ces éléments et les plaques serait, en pratique, réalisée par une liaison rotule). 1. C'est-à-dire une structure de longueur suffisamment grande, comparée à sa longueur caractéristique transverse la plus petite, pour être susceptible de fléchir. Page 8/15 x B2 x (a) B B B1 B' B'2 (2), (3) (c) B B'1 B''2 (1), (4) P L0 x (b) B''=B' B''1 R P'' P' A2 y z O A 2a A1 A2 O A A1 Q A''1 A''2 O A Figure 2 Déformation de la structure, en compression (situation (b)) ou en flexion (situation (c)), en -- réponse à un déplacement imposé BB = - ex ( 0) du centre B de la plaque supérieure (celui de la plaque inférieure (A) est supposé rester fixe). Bien qu'étant représentée en projection dans le plan (O, x, y), on gardera à l'esprit que la structure étudiée est tridimensionnelle. · Nous nous proposons de déterminer la configuration adoptée par la structure en réponse à un déplacement imposé. L'action de la pesanteur n'est pas prise en compte dans cette étude. 165 1. Exprimer, en fonction de K et , l'énergie potentielle élastique EC emmagasinée par la structure dans la situation de compression (b). · Dans la situation (c), nous considérons, d'une part que les arcs (A1 B1 ), (AB ) et (A2 B2 ) sont des arcs de -- cercle, d'autre part que l'arc (AB ) conserve sa longueur initiale L0 . Nous notons R = QP et ( 0) -- - l'ouverture angulaire (QB , QA). Tous les résultats seront établis sous les deux hypothèses L0 R. 170 2. Exprimer et le rapport R/L0 en fonction du rapport = /L0 . 3. Déduire de ces résultats la condition, portant sur , assurant que les deux hypothèses L0 R se trouvent simultanément vérifiées. 4. Exprimer, en fonction de K, L0 , a et , l'énergie potentielle élastique EF emmagasinée par la structure dans la situation de flexion (c). 175 5. Représenter, dans un système d'axes commun, l'allure graphique de la dépendance de chacune des énergies EC et EF vis-à-vis de . Commenter brièvement ces tracés. 6. Nous notons N le module de la force que l'opérateur extérieur doit fournir pour imposer le déplacement souhaité. Sur la base des tracés effectués en réponse à la question (5), établir l'expression, en fonction de K, L0 et a, du module de la force-seuil Ns au-delà duquel la structure fléchit. 180 Nous notons s le déplacement correspondant à la force-seuil Ns et s = s /L0 . 7. Représenter l'allure graphique de la dépendance de N vis-à-vis de . On précisera la valeur prise par N pour > s , dans le cadre du modèle de flexion adopté. Commenter brièvement
ce résultat.
8. Traduire, sur le rapport a/L0 , la condition de respect des hypothèses L0
R établie en réponse
à la question (3). Commenter ce résultat.
Page 9/15
9. Application : La raideur k (axiale) d'une tige homogène rectiligne, de
section uniforme S et de longueur
, est reliée au module d'élasticité longitudinale (ou module de Young) Y du
matériau la constituant
selon la relation suivante :
185
k=
YS
(1)
Nous considérons une barre homogène de section carrée d'aire 2b × 2b, de
longueur L0 et de module
d'élasticité longitudinale Y . Établir une expression de l'effort-seuil Ns en
fonction de Y , L0 et b. On
présentera les choix faits pour adapter la structure modèle que nous avons
étudiée aux caractéristiques
de la barre.
190
Calculer la valeur de Ns pour les données suivantes : Y = 200 GPa (acier) ; L0
= 1 m ; 2b = 1 cm.
195
10. Nous avons implicitement supposé que la flexion, lorsqu'elle apparaît, se
produit dans le plan (O, x, y)
(se reporter à la figure (2)-(c)). Elle pourrait se produire, a priori, dans
tout plan (O, x, u) tel que
eu = cos ey + sin ez ( [-/2, /2]).
Exprimer Ns pour = /4. Peut-on alors prévoir dans quel plan, = 0 ou = /4 (en
ne considérant
que ces deux situations), la flexion de la structure modèle étudiée se produit ?
2
200
205
Étude du comportement mécanique d'un cristal liquide en phase smectique A.
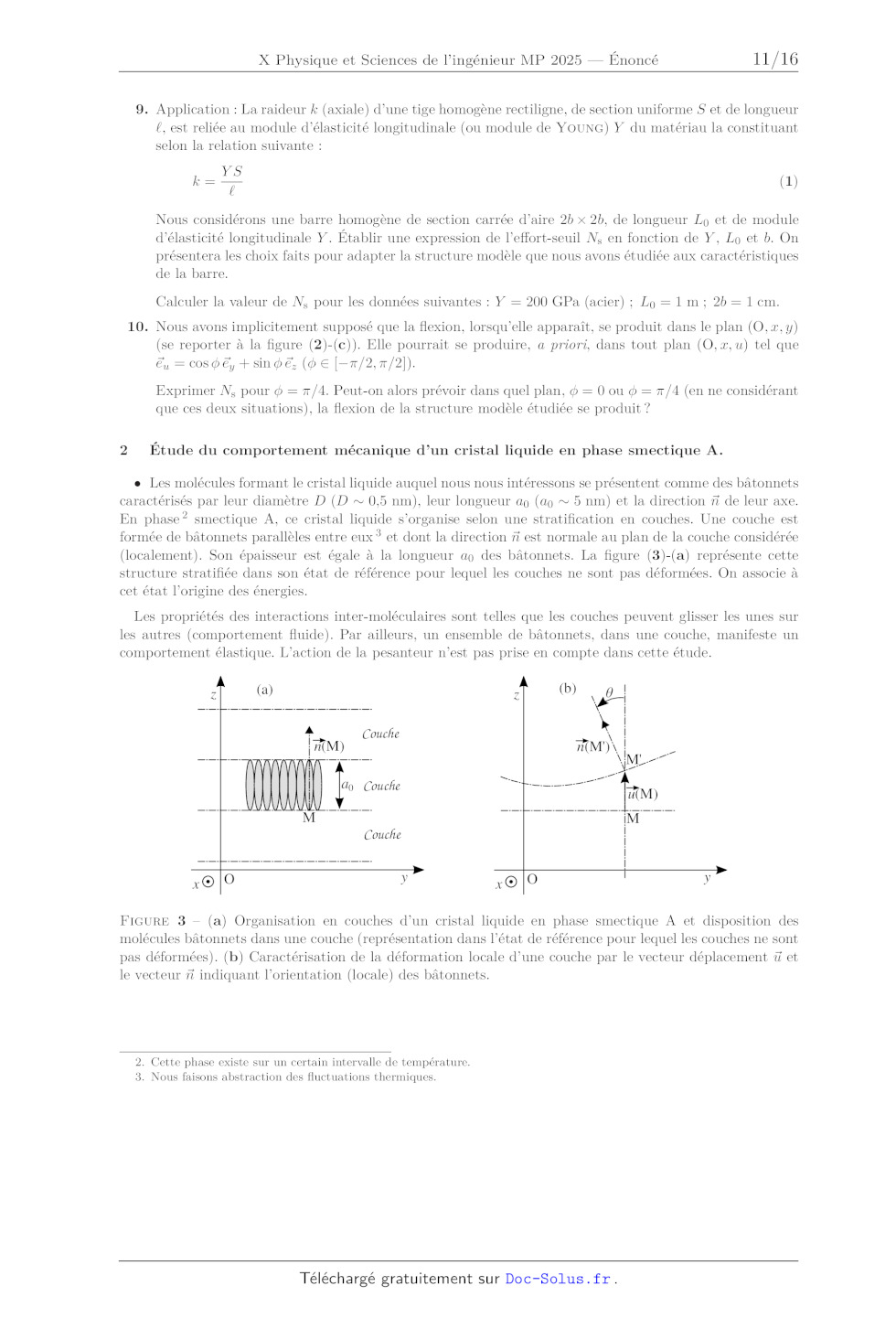
· Les molécules formant le cristal liquide auquel nous nous intéressons se
présentent comme des bâtonnets
caractérisés par leur diamètre D (D 0,5 nm), leur longueur a0 (a0 5 nm) et la
direction n de leur axe.
En phase 2 smectique A, ce cristal liquide s'organise selon une stratification
en couches. Une couche est
formée de bâtonnets parallèles entre eux 3 et dont la direction n est normale
au plan de la couche considérée
(localement). Son épaisseur est égale à la longueur a0 des bâtonnets. La figure
(3)-(a) représente cette
structure stratifiée dans son état de référence pour lequel les couches ne sont
pas déformées. On associe à
cet état l'origine des énergies.
Les propriétés des interactions inter-moléculaires sont telles que les couches
peuvent glisser les unes sur
les autres (comportement fluide). Par ailleurs, un ensemble de bâtonnets, dans
une couche, manifeste un
comportement élastique. L'action de la pesanteur n'est pas prise en compte dans
cette étude.
(a)
z
(b)
z
n(M)
Couche
n(M')
a0 Couche
M'
u(M)
M
M
Couche
x
O
y
x
O
y
Figure 3 (a) Organisation en couches d'un cristal liquide en phase smectique
A et disposition des
molécules bâtonnets dans une couche (représentation dans l'état de référence
pour lequel les couches ne sont
pas déformées). (b) Caractérisation de la déformation locale d'une couche par
le vecteur déplacement u et
le vecteur n indiquant l'orientation (locale) des bâtonnets.
2. Cette phase existe sur un certain intervalle de température.
3. Nous faisons abstraction des fluctuations thermiques.
Page 10/15
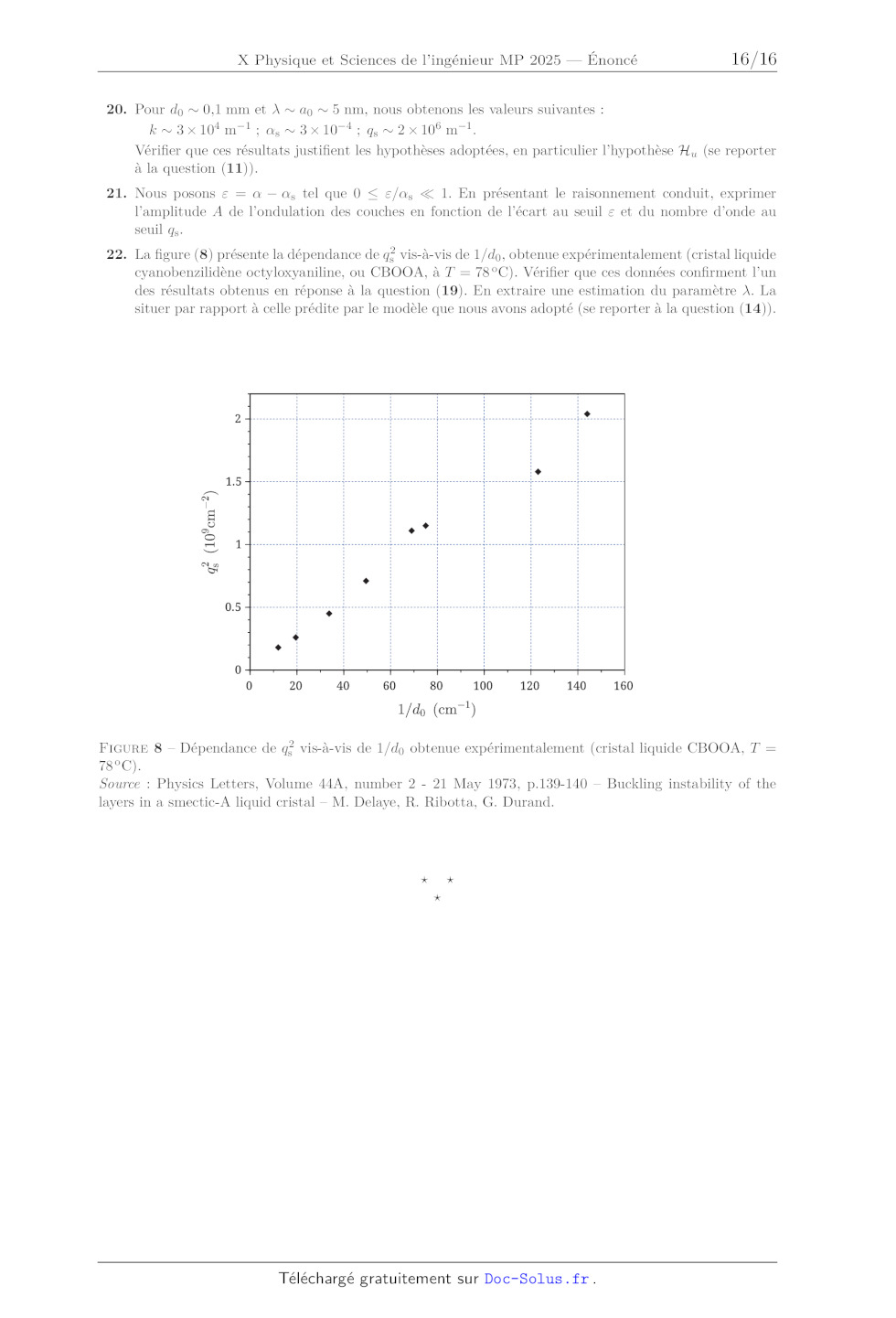
210
· Nous choisissons un repère cartésien R(O, x, y, z) tel que le plan (O, x, y)
est parallèle au plan des
couches dans l'état de référence (état sans déformation). Nous envisageons des
situations telles que le déplacement des molécules s'effectue essentiellement
selon l'axe (Oz). Nous décrivons alors l'état de déformation
du cristal liquide par le champ de déplacement de ses couches (que nous
appellerons indifféremment champ de
déformation). En supposant que ce dernier ne dépend pas de la coordonnée x, et
en adoptant une description
continue du milieu (hypothèse notée Hu ), il prend la forme suivante :
--
u(M) = MM = u(y, z) ez
215
220
(2)
M = M(x, y, z) représente un point d'une couche dans l'état de référence (état
sans déformation). Le point
M est son image, dans un état de déformation. Le vecteur unitaire n(M), orienté
par l'angle relativement
à l'axe (Oz), définit la direction locale des bâtonnets situés dans le
voisinage d'un point M d'une couche. Ce
vecteur n(M) est donc localement normal à la couche considérée. La figure
(3)-(b) précise ce paramétrage.
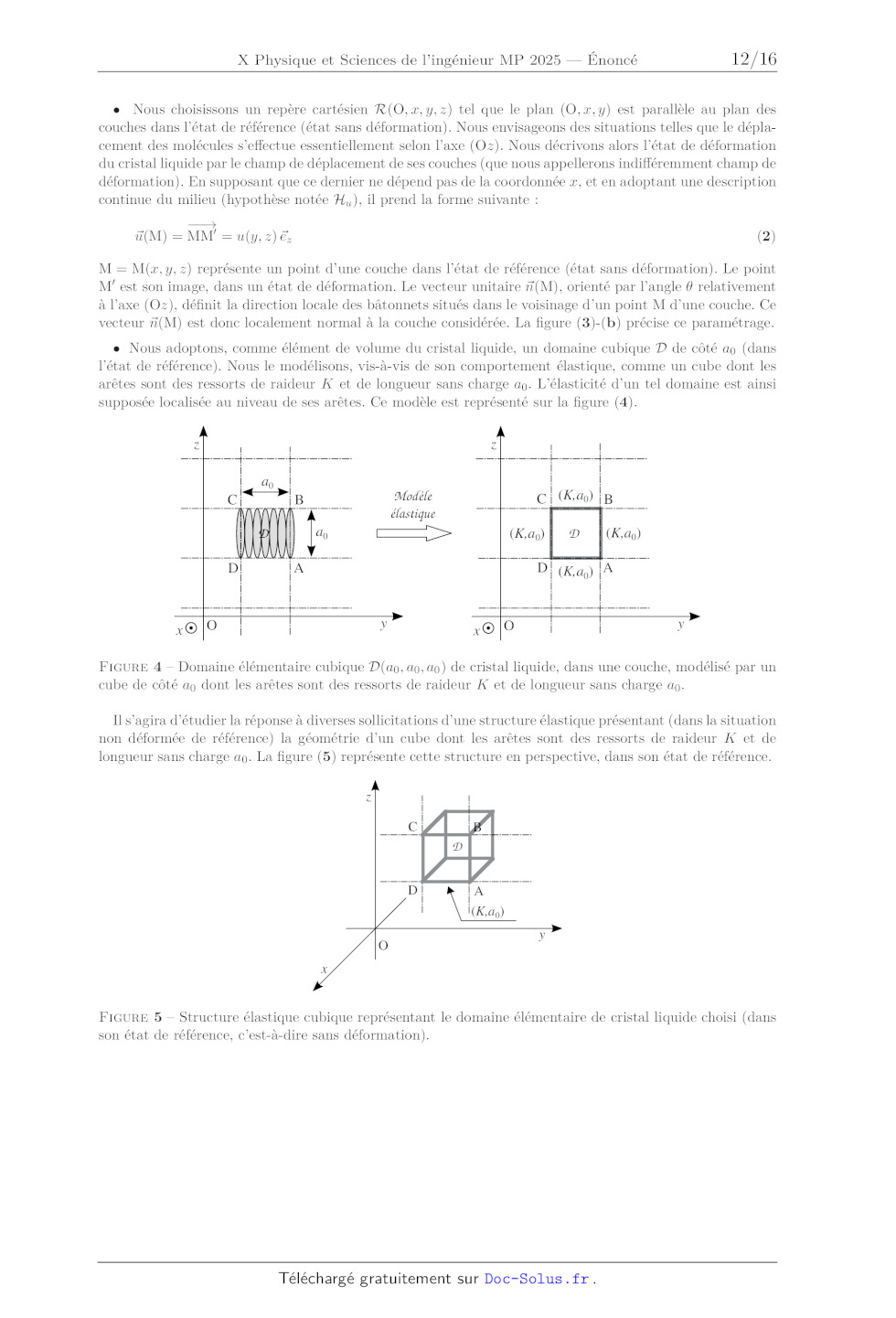
· Nous adoptons, comme élément de volume du cristal liquide, un domaine cubique
D de côté a0 (dans
l'état de référence). Nous le modélisons, vis-à-vis de son comportement
élastique, comme un cube dont les
arêtes sont des ressorts de raideur K et de longueur sans charge a0 .
L'élasticité d'un tel domaine est ainsi
supposée localisée au niveau de ses arêtes. Ce modèle est représenté sur la
figure (4).
z
z
C
a0
x
(K,a0)
a0
D
D
C (K,a0) B
Modèle
élastique
B
D
(K,a0)
D (K,a0) A
A
O
y
x
O
y
Figure 4 Domaine élémentaire cubique D(a0 , a0 , a0 ) de cristal liquide,
dans une couche, modélisé par un
cube de côté a0 dont les arêtes sont des ressorts de raideur K et de longueur
sans charge a0 .
Il s'agira d'étudier la réponse à diverses sollicitations d'une structure
élastique présentant (dans la situation
non déformée de référence) la géométrie d'un cube dont les arêtes sont des
ressorts de raideur K et de
longueur sans charge a0 . La figure (5) représente cette structure en
perspective, dans son état de référence.
z
C
B
D
D
A
(K,a0)
y
O
x
Figure 5 Structure élastique cubique représentant le domaine élémentaire de
cristal liquide choisi (dans
son état de référence, c'est-à-dire sans déformation).
225
Page 11/15
2. 1
Densité volumique d'énergie élastique.
Il s'agit d'exprimer l'énergie élastique emmagasinée par unité de volume du
cristal liquide, associée au
champ de déplacement u.
230
11. Indiquer à quelles conditions, portant sur la fonction u = u(y, z) (voire
également certaines de ses
dérivées) et le paramètre a0 , l'hypothèse Hu est justifiée, c'est-à-dire que
le cristal liquide peut être
considéré comme un milieu continu, vis-à-vis du champ de déplacement.
Ì Tous les résultats seront établis dans le cadre de l'hypothèse Hu .
Ì Par ailleurs, dans toute la sous-section (2.1), nous nous placerons dans
l'approximation linéaire. En
particulier, nous supposerons que |u/y| 1 et |u/z| 1.
235
12. Nous nous plaçons dans une situation telle que la fonction u = u(y, z) ne
dépend pas de y (état de
simple extension ou compression). Établir que l'énergie eE alors emmagasinée,
par unité de volume
du cristal liquide, prend la forme suivante :
1
u
eE = B
2
z
2
(3)
On exprimera la constante B en fonction de K et a0 .
13. Justifier que la constante B ne dépend pas de la taille choisie du domaine
élémentaire cubique.
240
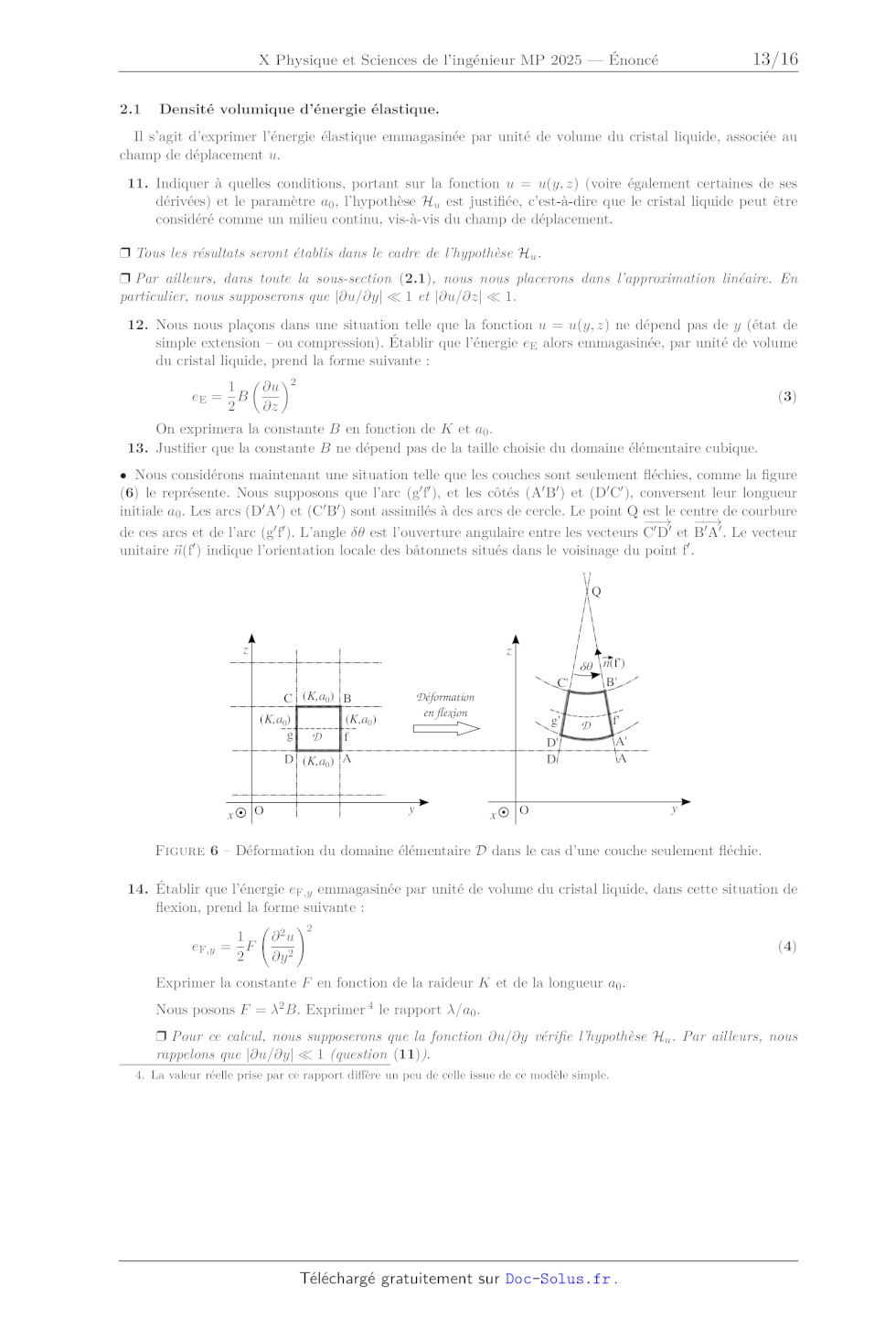
· Nous considérons maintenant une situation telle que les couches sont
seulement fléchies, comme la figure
(6) le représente. Nous supposons que l'arc (g f ), et les côtés (A B ) et (D C
), conversent leur longueur
initiale a0 . Les arcs (D A ) et (C B ) sont assimilés à des arcs de cercle. Le
point Q est le centre de courbure
--
--
de ces arcs et de l'arc (g f ). L'angle est l'ouverture angulaire entre les
vecteurs C D et B A . Le vecteur
unitaire n(f ) indique l'orientation locale des bâtonnets situés dans le
voisinage du point f .
Q
z
z
C'
C (K,a0) B
(K,a0)
g
D
Déformation
en exion
(K,a0)
f
g'
O
D
D'
D
D (K,a0) A
x
n(f')
B'
y
x
f'
A'
A
O
y
Figure 6 Déformation du domaine élémentaire D dans le cas d'une couche
seulement fléchie.
245
14. Établir que l'énergie eF,y emmagasinée par unité de volume du cristal
liquide, dans cette situation de
flexion, prend la forme suivante :
1
eF,y = F
2
2u
y 2
2
(4)
Exprimer la constante F en fonction de la raideur K et de la longueur a0 .
Nous posons F = 2 B. Exprimer 4 le rapport /a0 .
250
Ì Pour ce calcul, nous supposerons que la fonction u/y vérifie l'hypothèse Hu .
Par ailleurs, nous
rappelons que |u/y| 1 (question (11)).
4. La valeur réelle prise par ce rapport diffère un peu de celle issue de ce
modèle simple.
Page 12/15
15. Cette densité volumique d'énergie de flexion peut également s'écrire sous
la forme suivante (toujours
dans le cadre des hypothèses adoptées) :
1
eF,y = F
2
ny
y
2
où ny = n · ey
(5)
Cette écriture suggère qu'il faut considérer, parallèlement, la densité
volumique d'énergie de flexion
suivante :
1
eF,z = F
2
ny
z
2
(6)
Décrire, à l'appui d'un dessin, le type de déformation associé à cette énergie.
255
· En conclusion, dans le cadre des hypothèses adoptées jusqu'ici, l'énergie
élastique totale e emmagasinée,
par unité de volume du cristal liquide soumis au champ de déplacement u, prend
la forme suivante :
2
2
2
2
2
1
u
u
2 u
+
+
e = eE + eF,y + eF,z = B
2
2 z
y
yz
(1)
2. 2
260
265
270
(7)
(2)
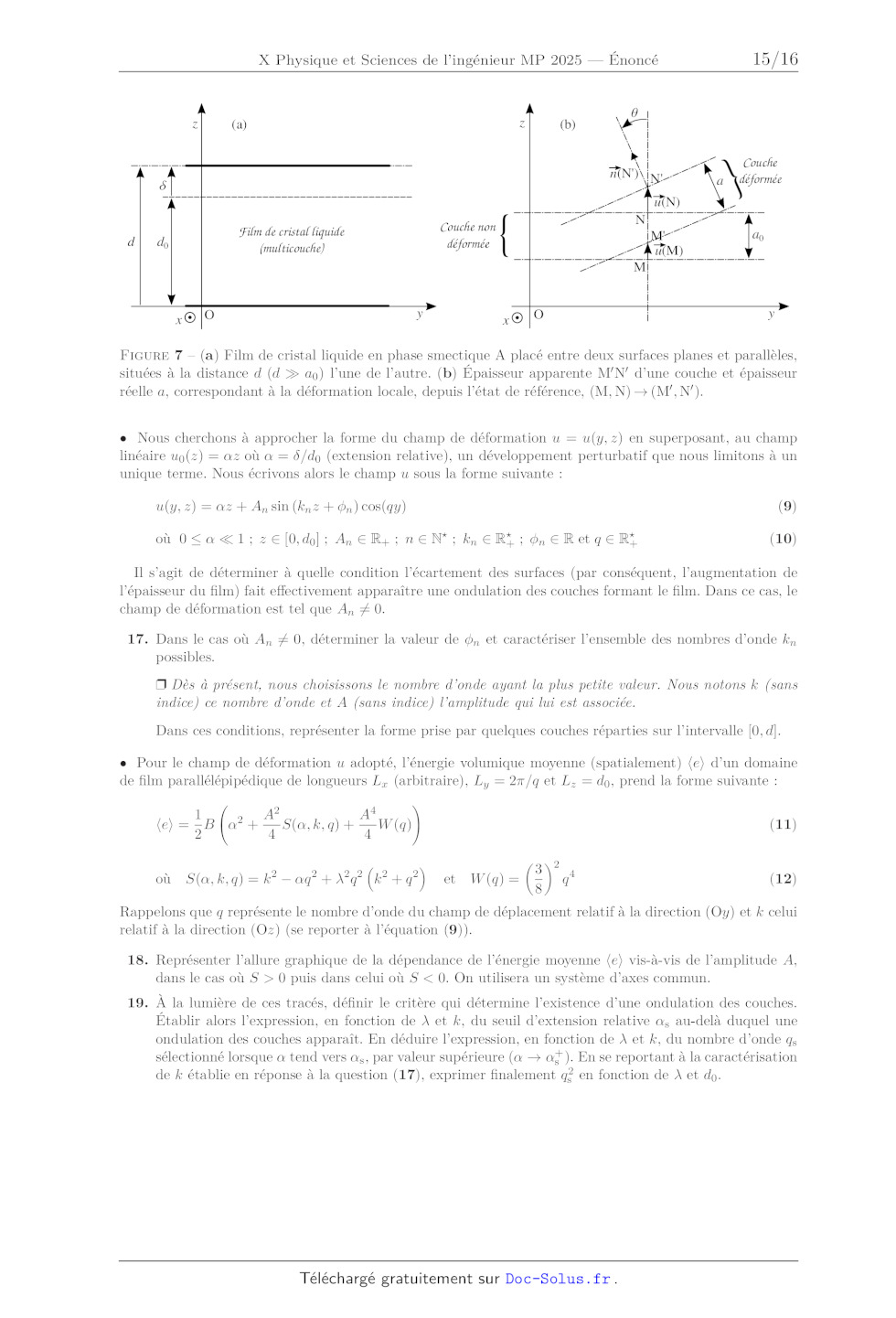
Ondulation des couches induite par une extension de l'épaisseur d'un film.
· Un film de cristal liquide en phase smectique A est déposé entre deux
surfaces rigides, planes et
parallèles. Ce film est constitué d'un grand nombre de couches (se reporter au
texte introductif de la section
(2)). Dans la situation de référence, les couches ne sont pas déformées et sont
parallèles aux surfaces. Depuis
cette situation, on augmente légèrement (mais brutalement) la distance séparant
les surfaces et l'on observe
l'état de déformation des couches immédiatement après cette opération 5 .
· Nous notons d0 (d0 0,1 mm
a0 ) 6 la distance séparant les surfaces dans la situation de référence,
et d = d0 + (0 d0 ) celle correspondant à un déplacement de la surface
supérieure (la surface
inférieure est supposée fixe). Nous considérons que le film reste toujours en
contact avec les surfaces et, par
ailleurs, que le nombre de couches le formant demeure constant. Comparativement
à d0 , le film apparaît
comme étant infini selon les directions (Ox) et (Oy). Cette situation est
illustrée sur la figure (7)-(a).
· La figure (7)-(b) fait apparaître l'épaisseur apparente M N d'une couche et
son épaisseur réelle a,
correspondant à la déformation locale, depuis l'état de référence, (M, N) (M ,
N ).
16. Nous souhaitons prendre en compte, dans l'expression de eE , l'effet d'une
éventuelle inclinaison (locale)
des couches. Dans cette situation, l'épaisseur réelle a d'une couche n'est plus
assimilable à son épaisseur
apparente M N . Établir que le terme (1) de l'équation (7) doit alors être
remplacé par le terme (1 )
suivant, à l'ordre correctif le plus bas :
(1 ) =
275
u 1
-
z
2
u
y
2 2
(8)
Ì Pour l'étude qui va suivre, nous admettons que c'est la seule correction
déterminante à prendre
en compte. En conséquence, le terme (2) de l'équation (7) n'est pas modifié.
Par ailleurs, l'énergie
volumique e désignera maintenant celle corrigée de l'effet d'inclinaison des
couches.
5. On observerait, ensuite, une phase de relaxation des contraintes faisant
apparaître des défauts topologiques tendant à
augmenter, de façon désordonnée, le nombre de couches.
6. Au-delà d'une épaisseur de 0,1 mm ( 104 couches !), il devient très délicat
de former un film sans défaut.
Page 13/15
(b)
z
n(N') N'
d
Couche non
déformée
Film de cristal liquide
(multicouche)
d0
x
O
y
{
x
N
M
O
u(N)
M'
u(M)
{
(a)
z
a
Couche
déformée
a0
y
Figure 7 (a) Film de cristal liquide en phase smectique A placé entre deux
surfaces planes et parallèles,
situées à la distance d (d
a0 ) l'une de l'autre. (b) Épaisseur apparente M N d'une couche et épaisseur
réelle a, correspondant à la déformation locale, depuis l'état de référence,
(M, N) (M , N ).
280
· Nous cherchons à approcher la forme du champ de déformation u = u(y, z) en
superposant, au champ
linéaire u0 (z) = z où = /d0 (extension relative), un développement
perturbatif que nous limitons à un
unique terme. Nous écrivons alors le champ u sous la forme suivante :
u(y, z) = z + An sin (kn z + n ) cos(qy)
(9)
où 0 1 ; z [0, d0 ] ; An R+ ; n N ; kn R+ ; n R et q R+
(10)
Il s'agit de déterminer à quelle condition l'écartement des surfaces (par
conséquent, l'augmentation de
l'épaisseur du film) fait effectivement apparaître une ondulation des couches
formant le film. Dans ce cas, le
champ de déformation est tel que An = 0.
285
17. Dans le cas où An = 0, déterminer la valeur de n et caractériser l'ensemble
des nombres d'onde kn
possibles.
Ì Dès à présent, nous choisissons le nombre d'onde ayant la plus petite valeur.
Nous notons k (sans
indice) ce nombre d'onde et A (sans indice) l'amplitude qui lui est associée.
Dans ces conditions, représenter la forme prise par quelques couches réparties
sur l'intervalle [0, d].
290
· Pour le champ de déformation u adopté, l'énergie volumique moyenne
(spatialement) e d'un domaine
de film parallélépipédique de longueurs Lx (arbitraire), Ly = 2/q et Lz = d0 ,
prend la forme suivante :
A2
1
A4
e = B 2 +
S(, k, q) +
W (q)
2
4
4
(11)
où S(, k, q) = k 2 - q 2 + 2 q 2 k 2 + q 2
2
et
W (q) =
3
8
q4
(12)
Rappelons que q représente le nombre d'onde du champ de déplacement relatif à
la direction (Oy) et k celui
relatif à la direction (Oz) (se reporter à l'équation (9)).
295
300
18. Représenter l'allure graphique de la dépendance de l'énergie moyenne e
vis-à-vis de l'amplitude A,
dans le cas où S > 0 puis dans celui où S < 0. On utilisera un système d'axes commun. 19. À la lumière de ces tracés, définir le critère qui détermine l'existence d'une ondulation des couches. Établir alors l'expression, en fonction de et k, du seuil d'extension relative s au-delà duquel une ondulation des couches apparaît. En déduire l'expression, en fonction de et k, du nombre d'onde qs sélectionné lorsque tend vers s , par valeur supérieure ( s+ ). En se reportant à la caractérisation de k établie en réponse à la question (17), exprimer finalement qs2 en fonction de et d0 . Page 14/15 305 20. Pour d0 0,1 mm et a0 5 nm, nous obtenons les valeurs suivantes : k 3 × 104 m-1 ; s 3 × 10-4 ; qs 2 × 106 m-1 . Vérifier que ces résultats justifient les hypothèses adoptées, en particulier l'hypothèse Hu (se reporter à la question (11)). 21. Nous posons = - s tel que 0 /s 1. En présentant le raisonnement conduit, exprimer l'amplitude A de l'ondulation des couches en fonction de l'écart au seuil et du nombre d'onde au seuil qs . 310 22. La figure (8) présente la dépendance de qs2 vis-à-vis de 1/d0 , obtenue expérimentalement (cristal liquide cyanobenzilidène octyloxyaniline, ou CBOOA, à T = 78 o C). Vérifier que ces données confirment l'un des résultats obtenus en réponse à la question (19). En extraire une estimation du paramètre . La situer par rapport à celle prédite par le modèle que nous avons adopté (se reporter à la question (14)). Figure 8 Dépendance de qs2 vis-à-vis de 1/d0 obtenue expérimentalement (cristal liquide CBOOA, T = 78 o C). Source : Physics Letters, Volume 44A, number 2 - 21 May 1973, p.139-140 Buckling instability of the layers in a smectic-A liquid cristal M. Delaye, R. Ribotta, G. Durand. 315 Page 15/15