
X Physique et Sciences de l'ingénieur MP 2011
| Thème de l'épreuve | Quelques aspects de la mesure du temps |
| Principaux outils utilisés | asservissements, mécanique, électronique, équations différentielles non linéaires |
| Mots clefs | clepsydre, quartz, boucle à verrouillage de phase, oscillateur non linéaire |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)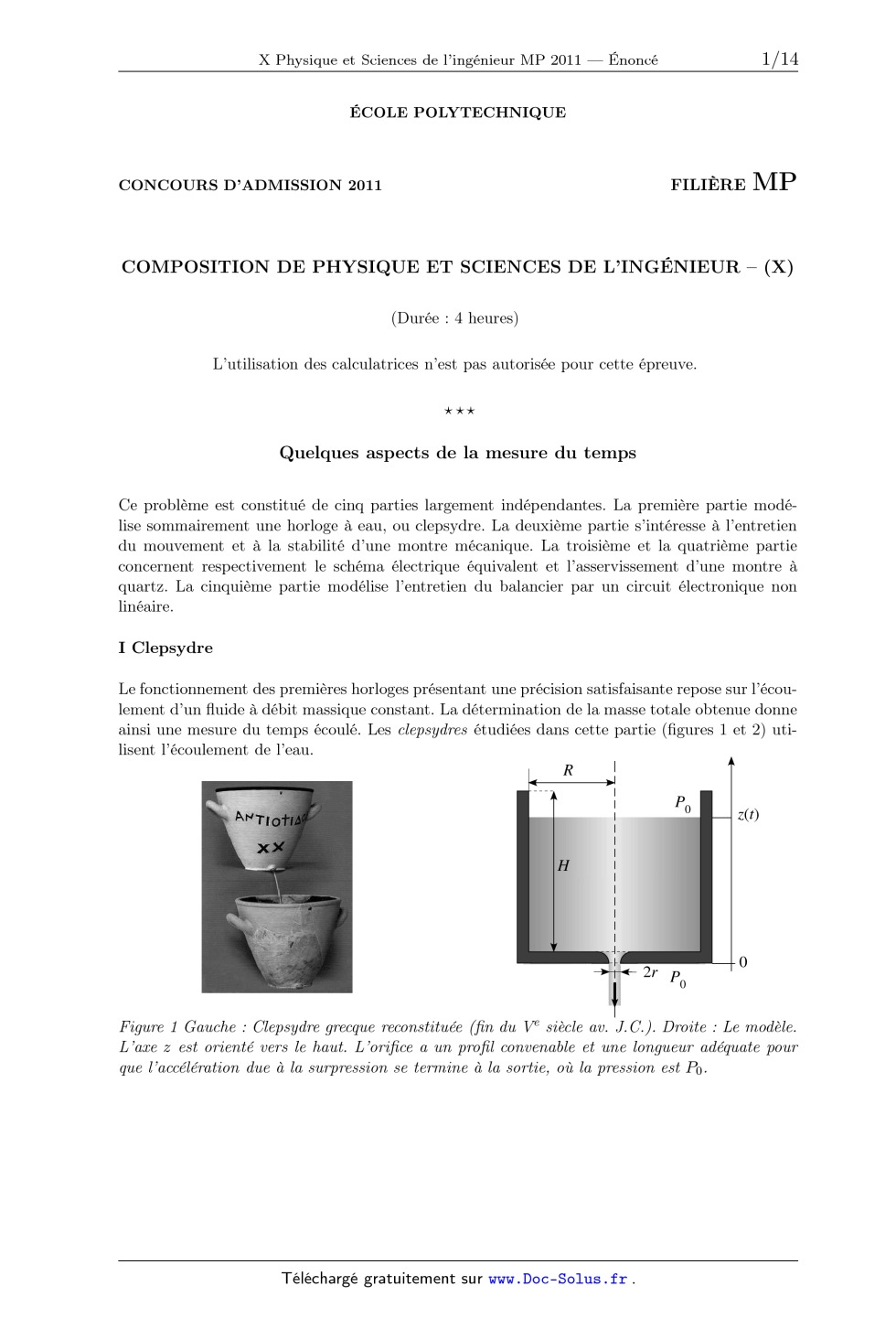



Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2011 FILIÈRE MP
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGENIEUR -- (X)
(Durée : 4 heures)
L'utilisation des calculatrices n'est pas autorisée pour cette épreuve.
***
Quelques aspects de la mesure du temps
Ce problème est constitué de cinq parties largement indépendantes. La première
partie modé--
lise sommairement une horloge a eau, ou clepsydre. La deuxième partie
s'intéresse a l'entretien
du mouvement et a la stabilité d'une montre mécanique. La troisième et la
quatrième partie
concernent respectivement le schéma électrique équivalent et l'asservissement
d'une montre a
quartz. La cinquième partie modélise l'entretien du balancier par un circuit
électronique non
linéaire.
I Clepsydre
Le fonctionnement des premières horloges présentant une précision satisfaisante
repose sur l'écou--
lement d'un fluide a débit massique constant. La détermination de la masse
totale obtenue donne
ainsi une mesure du temps écoulé. Les clepsgdres étudiées dans cette partie
(figures 1 et 2) uti--
lisent l'écoulement de l'eau.
R | À
0 z(t)
Figure ] Gauche : Clepsgdre grecque reconstituée (fin du Ve siècle au. JO.).
Droite : Le modèle.
L'aæe z est orienté vers le haut. L'orifice a un profil convenable et une
longueur adéquate pour
que l'accélération due a la surpression se termine a la sortie, ou la pression
est PO.
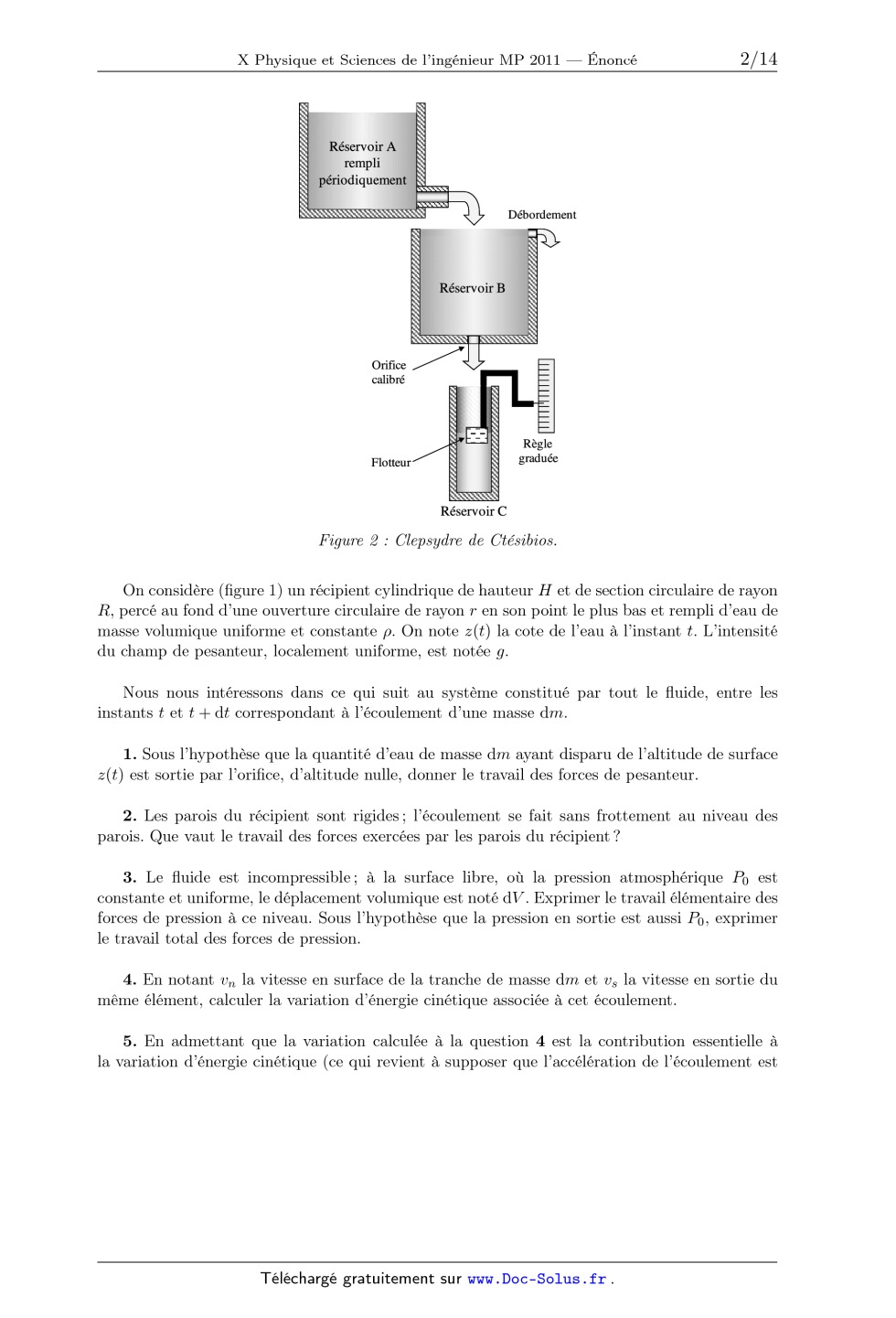
Réservoir A
rempli
périodiquement ;;...
Orifice /l
calibré
Règle
Flotteur graduee
Figure 2 : Clcpsydrc de Ctésibios.
On considère (figure 1) un récipient cylindrique de hauteur H et de section
circulaire de rayon
R, percé au fond d'une ouverture circulaire de rayon 7" en son point le plus
bas et rempli d'eau de
masse volumique uniforme et constante ,a. On note z(t) la cote de l'eau a
l'instant t. L'intensité
du champ de pesanteur, localement uniforme, est notée g.
Nous nous intéressons dans ce qui suit au système constitué par tout le fluide,
entre les
instants t et t + dt correspondant a l'écoulement d'une masse dm.
1. Sous l'hypothèse que la quantité d'eau de masse dm ayant disparu de
l'altitude de surface
z(t) est sortie par l'orifice, d'altitude nulle, donner le travail des forces
de pesanteur.
2. Les parois du récipient sont rigides, l'écoulement se fait sans frottement
au niveau des
parois. Que vaut le travail des forces exercées par les parois du récipient ?
3. Le fluide est incompressible, a la surface libre, où la pression
atmosphérique P0 est
constante et uniforme, le déplacement volumique est noté dV. Exprimer le
travail élémentaire des
forces de pression a ce niveau. Sous l'hypothèse que la pression en sortie est
aussi Po, exprimer
le travail total des forces de pression.
4. En notant Un la vitesse en surface de la tranche de masse dm et US la
vitesse en sortie du
même élément, calculer la variation d'énergie cinétique associée a cet
écoulement.
5. En admettant que la variation calculée a la question 4 est la contribution
essentielle a
la variation d'énergie cinétique (ce qui revient a supposer que l'accélération
de l'écoulement est
suffisamment petite), montrer que, sous l'hypothèse d'un débit en sortie
constant, la forme de la
Å ã4
z
r
= 1-
clepsydre devrait être donnée par la relation
. Exprimer z0 en fonction de vs et
z0
R
de g.
6. Ce modèle trouve rapidement ses limites : tracer rapidement l'allure de la
relation z(R)
établie à la question 5, estimer une valeur numérique plausible de z0 et
calculer la durée de
l'écoulement associé. Commenter ces résultats et expliquer brièvement le rôle
des trois récipients
du montage de Ctésibios (figure 2).
II Mouvement horloger mécanique
Le temps se mesure ici par le nombre d'oscillations accomplies par un
oscillateur mécanique
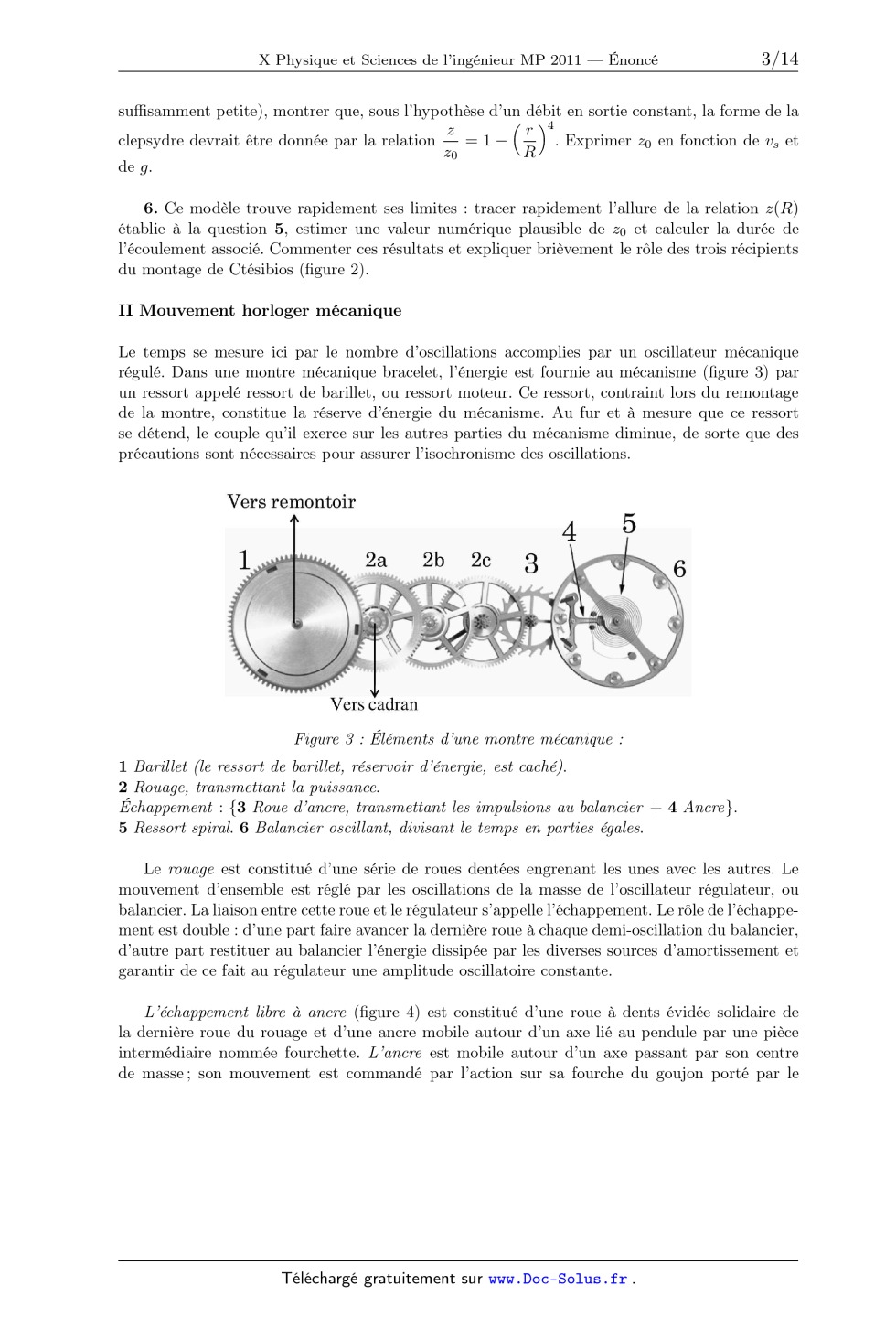
régulé. Dans une montre mécanique bracelet, l'énergie est fournie au mécanisme
(figure 3) par
un ressort appelé ressort de barillet, ou ressort moteur. Ce ressort, contraint
lors du remontage
de la montre, constitue la réserve d'énergie du mécanisme. Au fur et à mesure
que ce ressort
se détend, le couple qu'il exerce sur les autres parties du mécanisme diminue,
de sorte que des
précautions sont nécessaires pour assurer l'isochronisme des oscillations.
Figure 3 : Éléments d'une montre mécanique :
1 Barillet (le ressort de barillet, réservoir d'énergie, est caché).
2 Rouage, transmettant la puissance.
Échappement : {3 Roue d'ancre, transmettant les impulsions au balancier + 4
Ancre}.
5 Ressort spiral. 6 Balancier oscillant, divisant le temps en parties égales.
Le rouage est constitué d'une série de roues dentées engrenant les unes avec
les autres. Le
mouvement d'ensemble est réglé par les oscillations de la masse de
l'oscillateur régulateur, ou
balancier. La liaison entre cette roue et le régulateur s'appelle
l'échappement. Le rôle de l'échappement est double : d'une part faire avancer
la dernière roue à chaque demi-oscillation du balancier,
d'autre part restituer au balancier l'énergie dissipée par les diverses sources
d'amortissement et
garantir de ce fait au régulateur une amplitude oscillatoire constante.
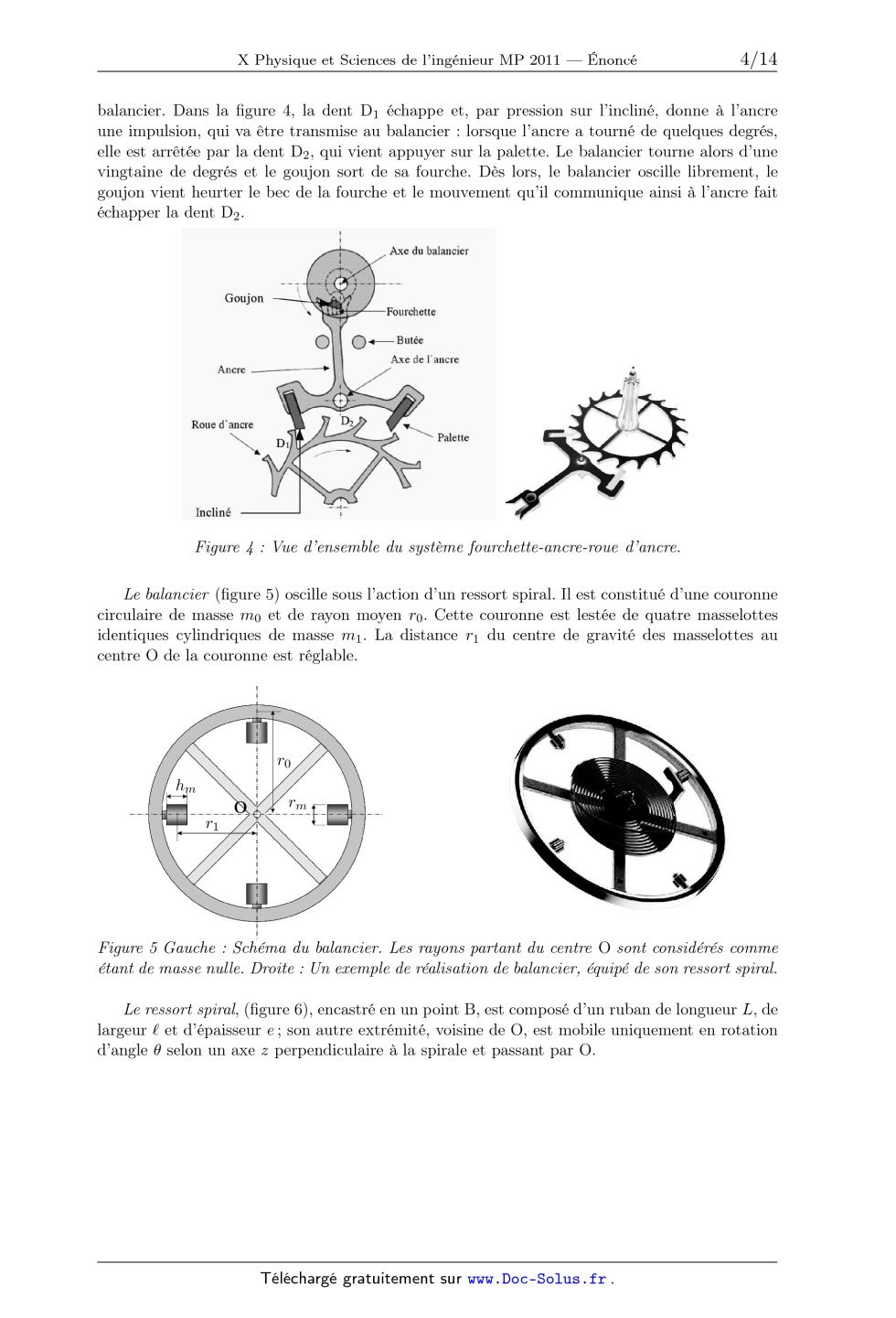
L'échappement libre à ancre (figure 4) est constitué d'une roue à dents évidée
solidaire de
la dernière roue du rouage et d'une ancre mobile autour d'un axe lié au pendule
par une pièce
intermédiaire nommée fourchette. L'ancre est mobile autour d'un axe passant par
son centre
de masse ; son mouvement est commandé par l'action sur sa fourche du goujon
porté par le
3
balancier. Dans la figure 4, la dent D1 échappe et, par pression sur l'incliné,
donne a l'ancre
une impulsion, qui va être transmise au balancier : lorsque l'ancre a tourné de
quelques degrés,
elle est arrêtée par la dent D2, qui vient appuyer sur la palette. Le balancier
tourne alors d'une
vingtaine de degrés et le goujon sort de sa fourche. Dès lors, le balancier
oscille librement, le
goujon vient heurter le bec de la fourche et le mouvement qu'il communique
ainsi a l'ancre fait
échapper la dent D2.
Ancre
Roue d'ancre
Incliné :
Figure 4 : Vue d'ensemble du système fourchette-ancre-roue d 'ancre.
Le balancier (figure 5) oscille sous l'action d'un ressort spiral. Il est
constitué d'une couronne
circulaire de masse m0 et de rayon moyen r0. Cette couronne est lestée de
quatre masselottes
identiques cylindriques de masse ml. La distance r1 du centre de gravité des
masselottes au
centre O de la couronne est réglable.
Figure 5 Gauche : Schéma du balancier. Les rayons partant du centre 0 sont
considérés comme
étant de masse nulle. Droite : Un eæemple de réalisation de balancier, équipé
de son ressort spiral.
Le ressort spiral, (figure 6), encastré en un point B, est composé d'un ruban
de longueur L, de
largeur EUR et d'épaisseur e; son autre extrémité, voisine de O, est mobile
uniquement en rotation
d'angle 9 selon un axe ?: perpendiculaire a la spirale et passant par O.
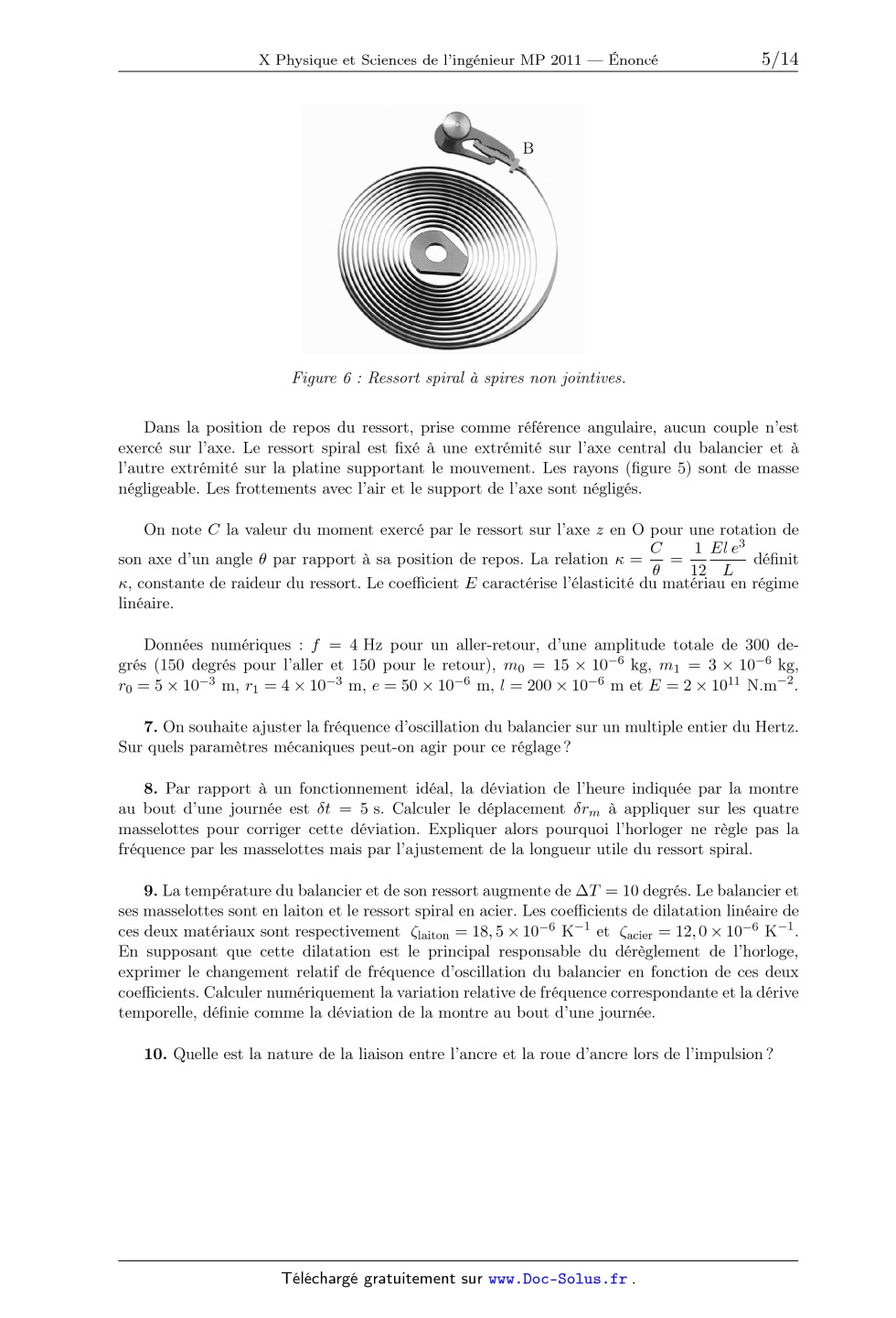
F figure 6 : Ressort spiral & spires non jointives.
Dans la position de repos du ressort, prise comme référence angulaire, aucun
couple n'est
exercé sur l'axe. Le ressort spiral est fixé à une extrémité sur l'axe central
du balancier et a
l'autre extrémité sur la platine supportant le mouvement. Les rayons (figure 5)
sont de masse
négligeable. Les frottements avec l'air et le support de l'axe sont négligés.
On note C la valeur du moment exercé par le ressort sur l'axe ?: en O pour une
rotation de
. . . C 1 Ele3 _
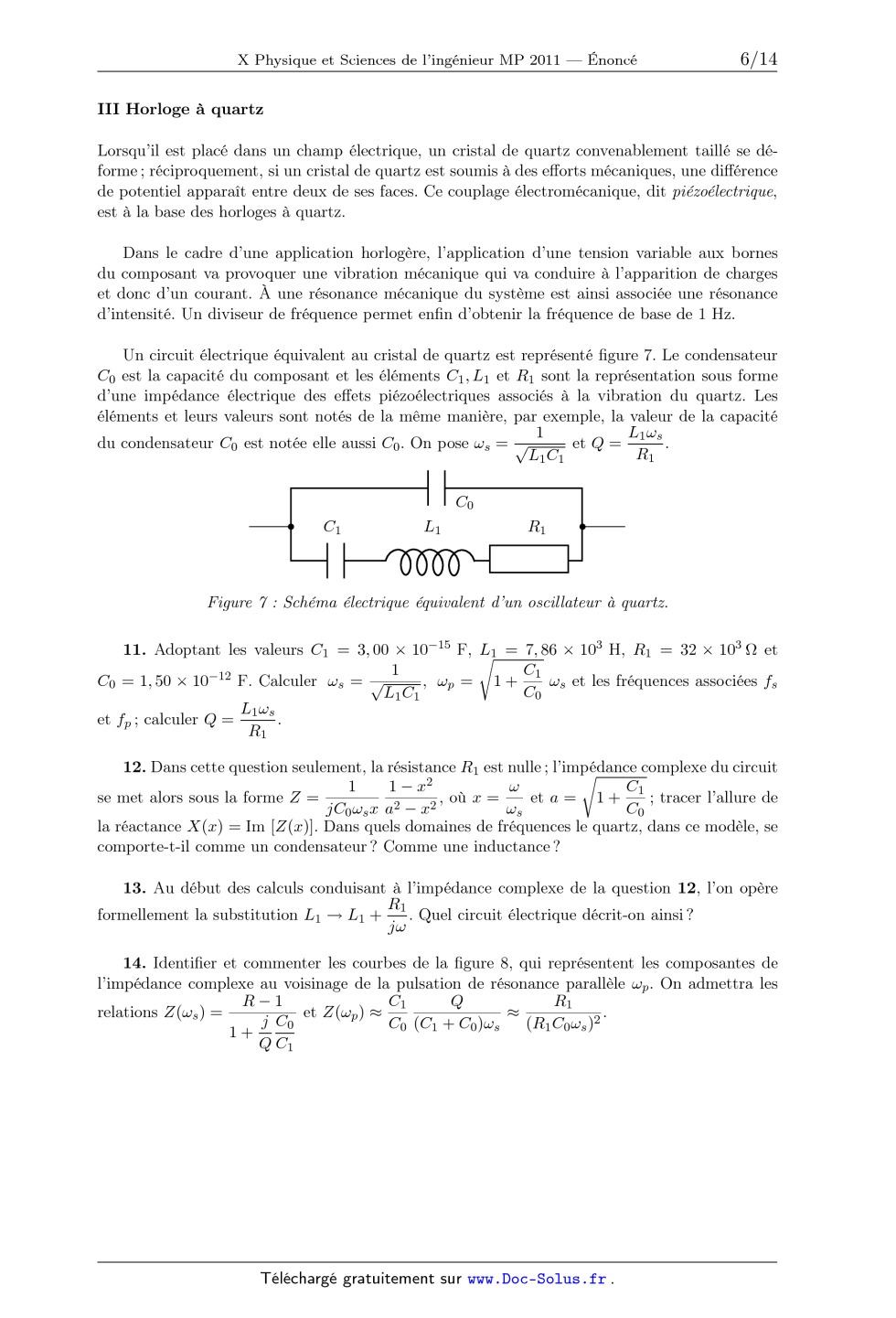
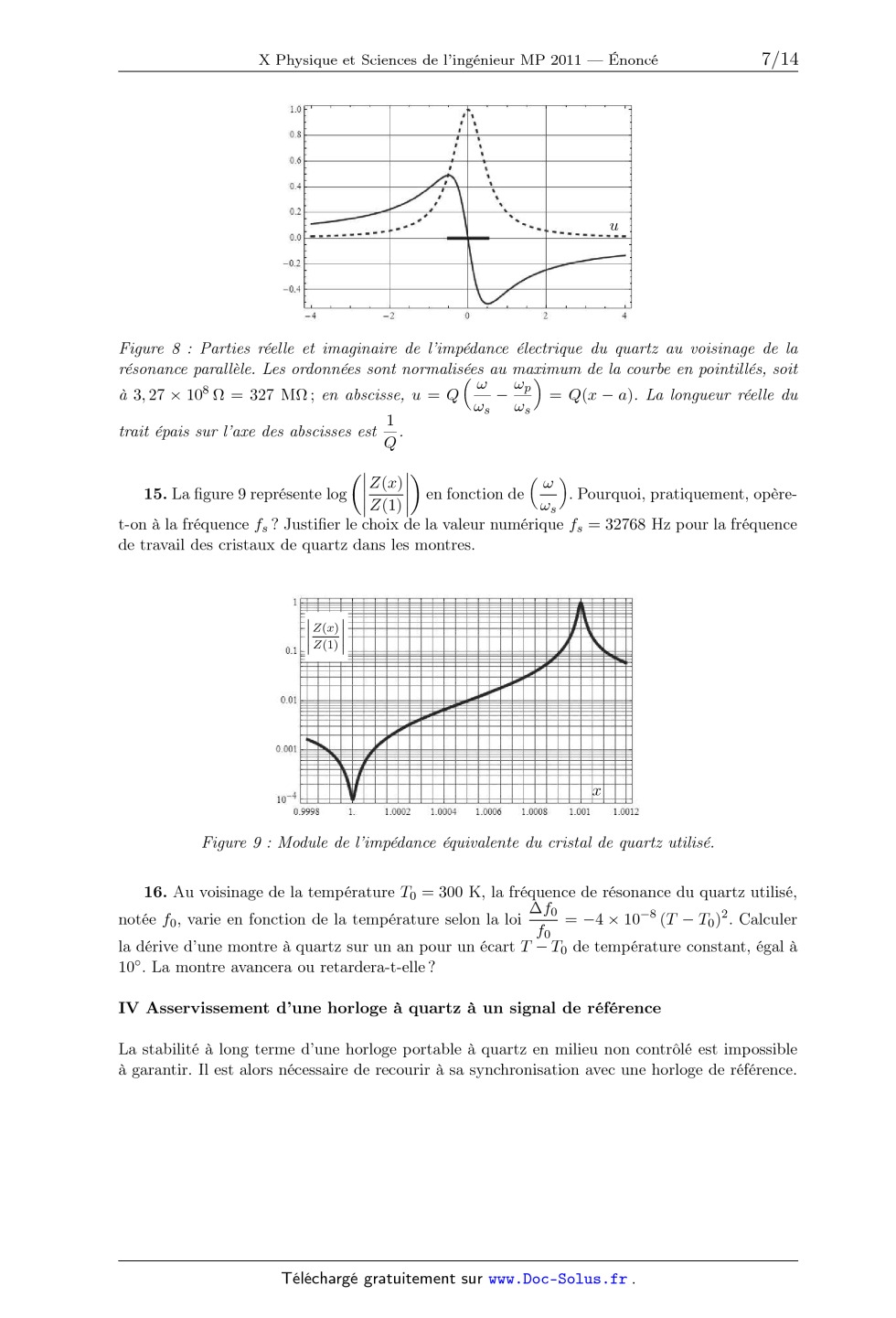
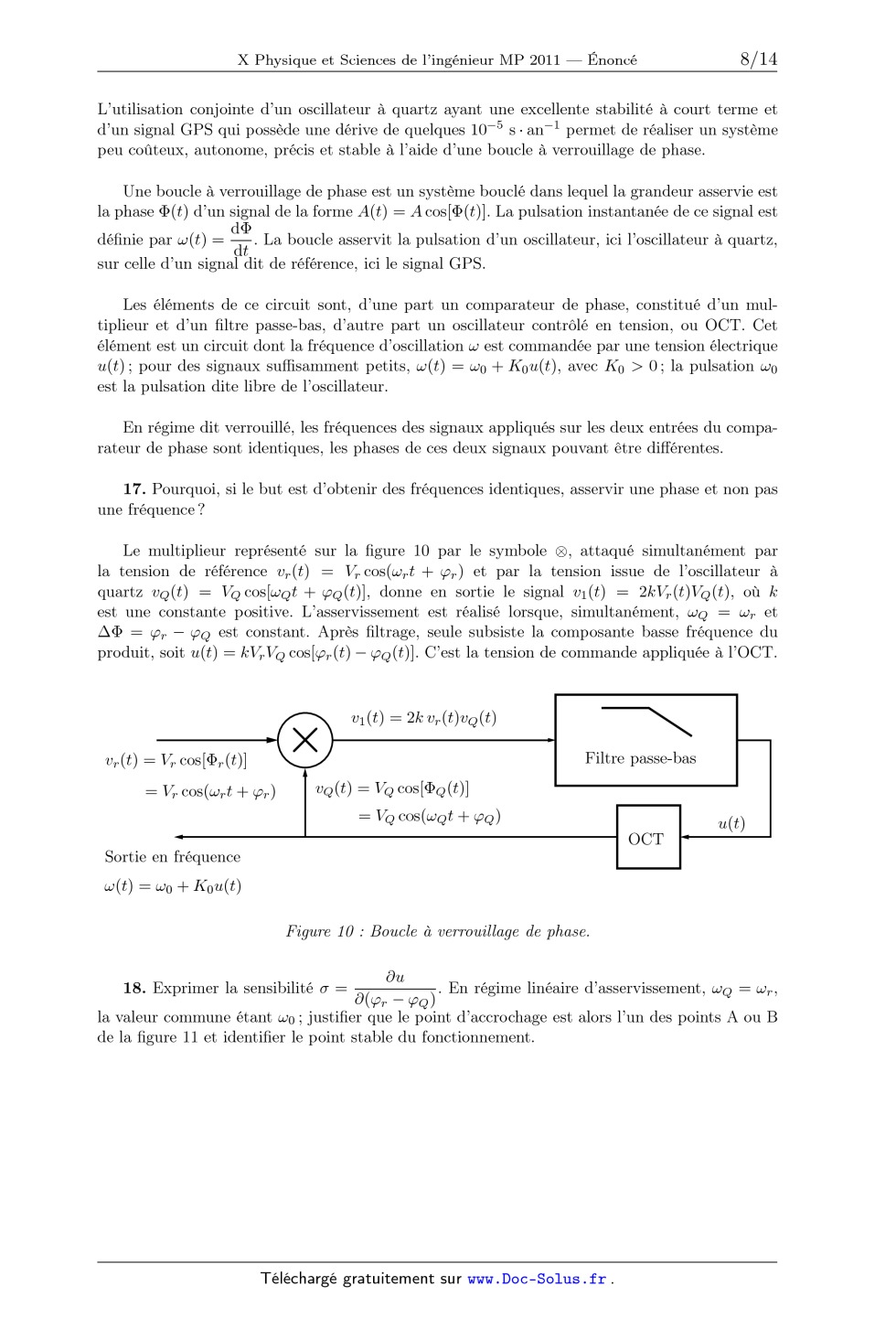
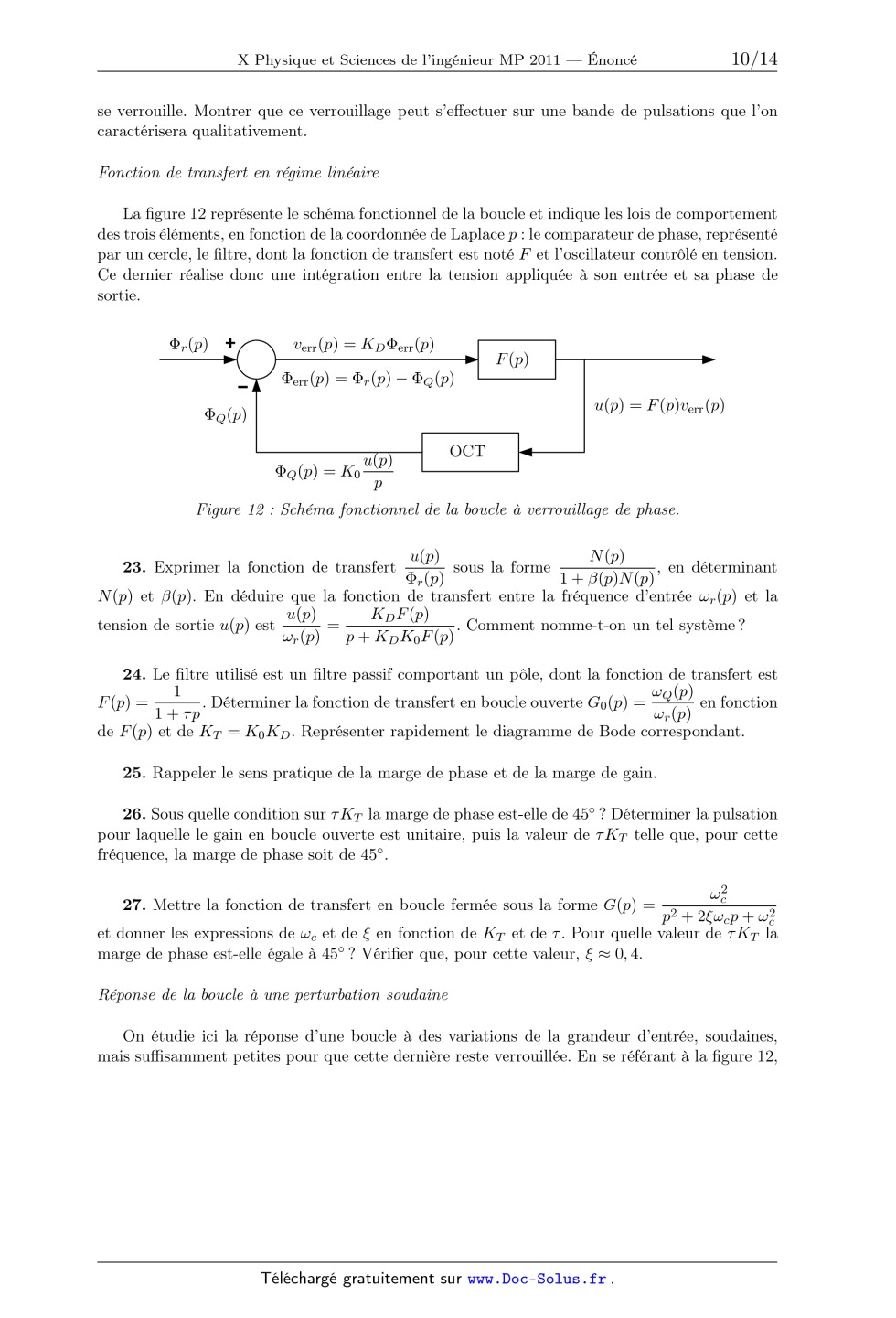
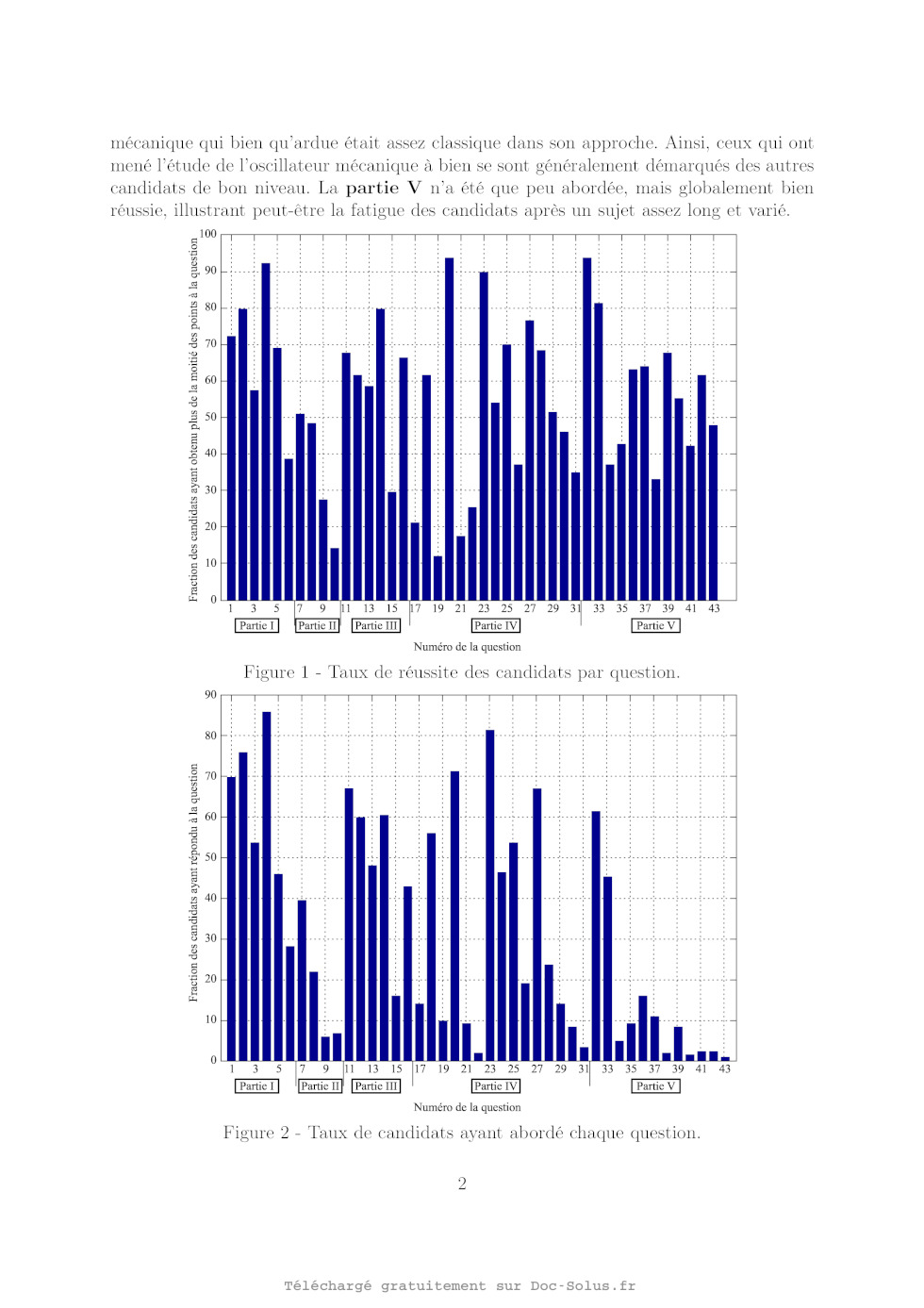
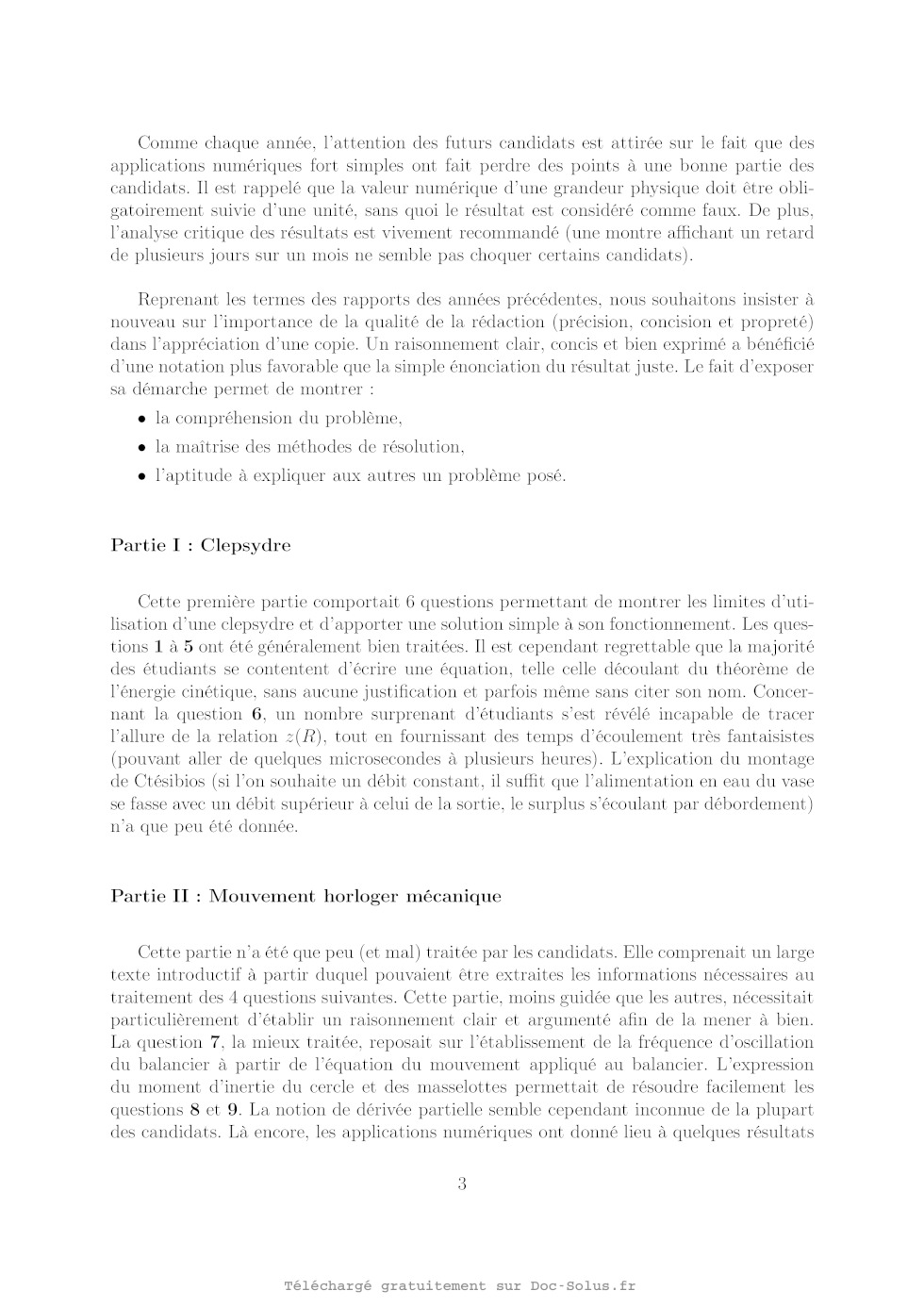
son axe d'un angle 9 par rapport a sa position de repos. La relation /<: : ? : E L définit /<:, constante de raideur du ressort. Le coefficient E caractérise l'élasticité du matériau en régime linéaire. Données numériques : f = 4 Hz pour un aller--retour, d'une amplitude totale de 300 de-- grés (150 degrés pour l'aller et 150 pour le retour), m0 = 15 >< 10_6 kg, m1 = 3 >< 10_6 kg, ...=5>< 10-3 m, r1=4>< 10-3 m, e=50>< 10-6 m,l=200>< 10-6 metE=2>< 1011 Nul--?. 7. On souhaite ajuster la fréquence d'oscillati0n du balancier sur un multiple entier du Hertz. Sur quels paramètres mécaniques peut--en agir pour ce réglage ? 8. Par rapport a un fonctionnement idéal, la déviation de l'heure indiquée par la montre au bout d'une journée est 515 = 5 s. Calculer le déplacement or... à appliquer sur les quatre masselottes pour corriger cette déviation. Expliquer alors pourquoi l'horloger ne règle pas la fréquence par les masselottes mais par l'ajustement de la longueur utile du ressort spiral. 9. La température du balancier et de son ressort augmente de AT : 10 degrés. Le balancier et ses masselottes sont en laiton et le ressort spiral en acier. Les coefficients de dilatation linéaire de ces deux matériaux sont respectivement {laiton : 18, 5 >< 10_6 K_1 et {acier : 12, 0 >< 10_6 K_1. En supposant que cette dilatation est le principal responsable du dérèglement de l'horloge, exprimer le changement relatif de fréquence d'oscillati0n du balancier en fonction de ces deux coefficients. Calculer numériquement la variation relative de fréquence correspondante et la dérive temporelle, définie comme la déviation de la montre au bout d'une journée. 10. Quelle est la nature de la liaison entre l'ancre et la roue d'ancre lors de l'impulsion ? III Horloge à quartz Lorsqu'il est placé dans un champ électrique, un cristal de quartz convenablement taillé se déforme ; réciproquement, si un cristal de quartz est soumis à des efforts mécaniques, une différence de potentiel apparaît entre deux de ses faces. Ce couplage électromécanique, dit piézoélectrique, est à la base des horloges à quartz. Dans le cadre d'une application horlogère, l'application d'une tension variable aux bornes du composant va provoquer une vibration mécanique qui va conduire à l'apparition de charges et donc d'un courant. À une résonance mécanique du système est ainsi associée une résonance d'intensité. Un diviseur de fréquence permet enfin d'obtenir la fréquence de base de 1 Hz. Un circuit électrique équivalent au cristal de quartz est représenté figure 7. Le condensateur C0 est la capacité du composant et les éléments C1 , L1 et R1 sont la représentation sous forme d'une impédance électrique des effets piézoélectriques associés à la vibration du quartz. Les éléments et leurs valeurs sont notés de la même manière, par exemple, la valeur de la capacité 1 L1 s . du condensateur C0 est notée elle aussi C0 . On pose s = et Q = R1 L1 C1 C0 C1 L1 R1 Figure 7 : Schéma électrique équivalent d'un oscillateur à quartz. 11. Adoptant les valeurs C1 = 3, 00 × 10-15 F, L1 = 7, 86 × 103 H, R1 = 32 × 103 et 1 C1 C0 = 1, 50 × 10-12 F. Calculer s = , p = 1 + s et les fréquences associées fs C0 L1 C1 L1 s . et fp ; calculer Q = R1 12. Dans cette question seulement, la résistance R1 est nulle ; l'impédance complexe du circuit 1 1 - x2 C1 se met alors sous la forme Z = , où x = et a = 1 + ; tracer l'allure de 2 2 jC0 s x a - x s C0 la réactance X(x) = Im [Z(x)]. Dans quels domaines de fréquences le quartz, dans ce modèle, se comporte-t-il comme un condensateur ? Comme une inductance ? 13. Au début des calculs conduisant à l'impédance complexe de la question 12, l'on opère R1 formellement la substitution L1 L1 + . Quel circuit électrique décrit-on ainsi ? j 14. Identifier et commenter les courbes de la figure 8, qui représentent les composantes de l'impédance complexe au voisinage de la pulsation de résonance parallèle p . On admettra les R-1 C1 Q R1 relations Z(s ) = et Z(p ) . j C0 C0 (C1 + C0 )s (R1 C0 s )2 1+ Q C1 6 u Figure 8 : Parties réelle et imaginaire de l'impédance électrique du quartz au voisinage de la résonance parallèle. Les ordonnées sont normalisées de la courbe en pointillés, soit Å au maximum ã p à 3, 27 × 108 = 327 M ; en abscisse, u = Q - = Q(x - a). La longueur réelle du s s 1 trait épais sur l'axe des abscisses est . Q Ç å Z(x) 15. La figure 9 représente log en fonction de . Pourquoi, pratiquement, opèreZ(1) s t-on à la fréquence fs ? Justifier le choix de la valeur numérique fs = 32768 Hz pour la fréquence de travail des cristaux de quartz dans les montres. Å ã Z(x) Z(1) x Figure 9 : Module de l'impédance équivalente du cristal de quartz utilisé. 16. Au voisinage de la température T0 = 300 K, la fréquence de résonance du quartz utilisé, f0 = -4 × 10-8 (T - T0 )2 . Calculer notée f0 , varie en fonction de la température selon la loi f0 la dérive d'une montre à quartz sur un an pour un écart T - T0 de température constant, égal à 10 . La montre avancera ou retardera-t-elle ? IV Asservissement d'une horloge à quartz à un signal de référence La stabilité à long terme d'une horloge portable à quartz en milieu non contrôlé est impossible à garantir. Il est alors nécessaire de recourir à sa synchronisation avec une horloge de référence. 7 L'utilisation conjointe d'un oscillateur à quartz ayant une excellente stabilité à court terme et d'un signal GPS qui possède une dérive de quelques 10-5 s · an-1 permet de réaliser un système peu coûteux, autonome, précis et stable à l'aide d'une boucle à verrouillage de phase. Une boucle à verrouillage de phase est un système bouclé dans lequel la grandeur asservie est la phase (t) d'un signal de la forme A(t) = A cos[(t)]. La pulsation instantanée de ce signal est d définie par (t) = . La boucle asservit la pulsation d'un oscillateur, ici l'oscillateur à quartz, dt sur celle d'un signal dit de référence, ici le signal GPS. Les éléments de ce circuit sont, d'une part un comparateur de phase, constitué d'un multiplieur et d'un filtre passe-bas, d'autre part un oscillateur contrôlé en tension, ou OCT. Cet élément est un circuit dont la fréquence d'oscillation est commandée par une tension électrique u(t) ; pour des signaux suffisamment petits, (t) = 0 + K0 u(t), avec K0 > 0 ;
la pulsation 0
est la pulsation dite libre de l'oscillateur.
En régime dit verrouillé, les fréquences des signaux appliqués sur les deux
entrées du comparateur de phase sont identiques, les phases de ces deux signaux
pouvant être différentes.
17. Pourquoi, si le but est d'obtenir des fréquences identiques, asservir une
phase et non pas
une fréquence ?
Le multiplieur représenté sur la figure 10 par le symbole , attaqué
simultanément par
la tension de référence vr (t) = Vr cos(r t + r ) et par la tension issue de
l'oscillateur à
quartz vQ (t) = VQ cos[Q t + Q (t)], donne en sortie le signal v1 (t) = 2kVr
(t)VQ (t), où k
est une constante positive. L'asservissement est réalisé lorsque,
simultanément, Q = r et
= r - Q est constant. Après filtrage, seule subsiste la composante basse
fréquence du
produit, soit u(t) = kVr VQ cos[r (t) - Q (t)]. C'est la tension de commande
appliquée à l'OCT.
v1 (t) = 2k vr (t)vQ (t)
Filtre passe-bas
vr (t) = Vr cos[r (t)]
= Vr cos(r t + r )
vQ (t) = VQ cos[Q (t)]
= VQ cos(Q t + Q )
u(t)
OCT
Sortie en fréquence
(t) = 0 + K0 u(t)
Figure 10 : Boucle à verrouillage de phase.
u
. En régime linéaire d'asservissement, Q = r ,
(r - Q )
la valeur commune étant 0 ; justifier que le point d'accrochage est alors l'un
des points A ou B
de la figure 11 et identifier le point stable du fonctionnement.
18. Exprimer la sensibilité =
8
-/2
/2
A
B
r -Q
Figure 11 : Représentation de cos(r - Q ).
On suppose à présent que la pulsation de référence n'est pas constante, mais
qu'elle évolue
dr
lentement et l'on pose (t) = r (t) - 0 =
- 0 . La fonction de transfert du filtre est, en
dt
1
. On rappelle enfin les notations et les relations générales
coordonnées de Laplace, F (p) =
1 + p
vr (t) = Vr cos[r (t)] = Vr cos[r t + r ]
vQ (t) = VQ cos[Q (t)] = VQ cos[Q t + Q ]
err (t) = r (t) - Q (t)
u(t) = kVr VQ cos[err (t)]
Q (t) =
dQ
= 0 + K0 u(t)
dt
r (t) =
dr
dt
19. Que faut-il supposer sur la valeur de r pour justifier la relation
approximative
du
u+
= kVr VQ cos[err (t)] ?
dt
20. On pose K = kK0 Vr VQ . Établir l'équation différentielle
d2 err derr
d
+
+ K cos err = (t) +
.
dt2
dt
dt
Plage de verrouillage, plage de capture
Pour faciliter le traitement des questions 21 et 22 on pourra, dans un premier
temps, considérer que le filtre passe-bas est de gain unitaire pour les
fréquences inférieures à une fréquence
fc et de gain nul pour les fréquences supérieures à fc .
21. Que devient chacun des termes de l'équation donnée à la question 20 en
situation de
verrouillage ? En admettant que, une fois verrouillée, la boucle peut suivre
les variations lentes
de la pulsation d'entrée, montrer que ce suivi ne peut se faire que dans une
plage de pulsation,
que l'on déterminera.
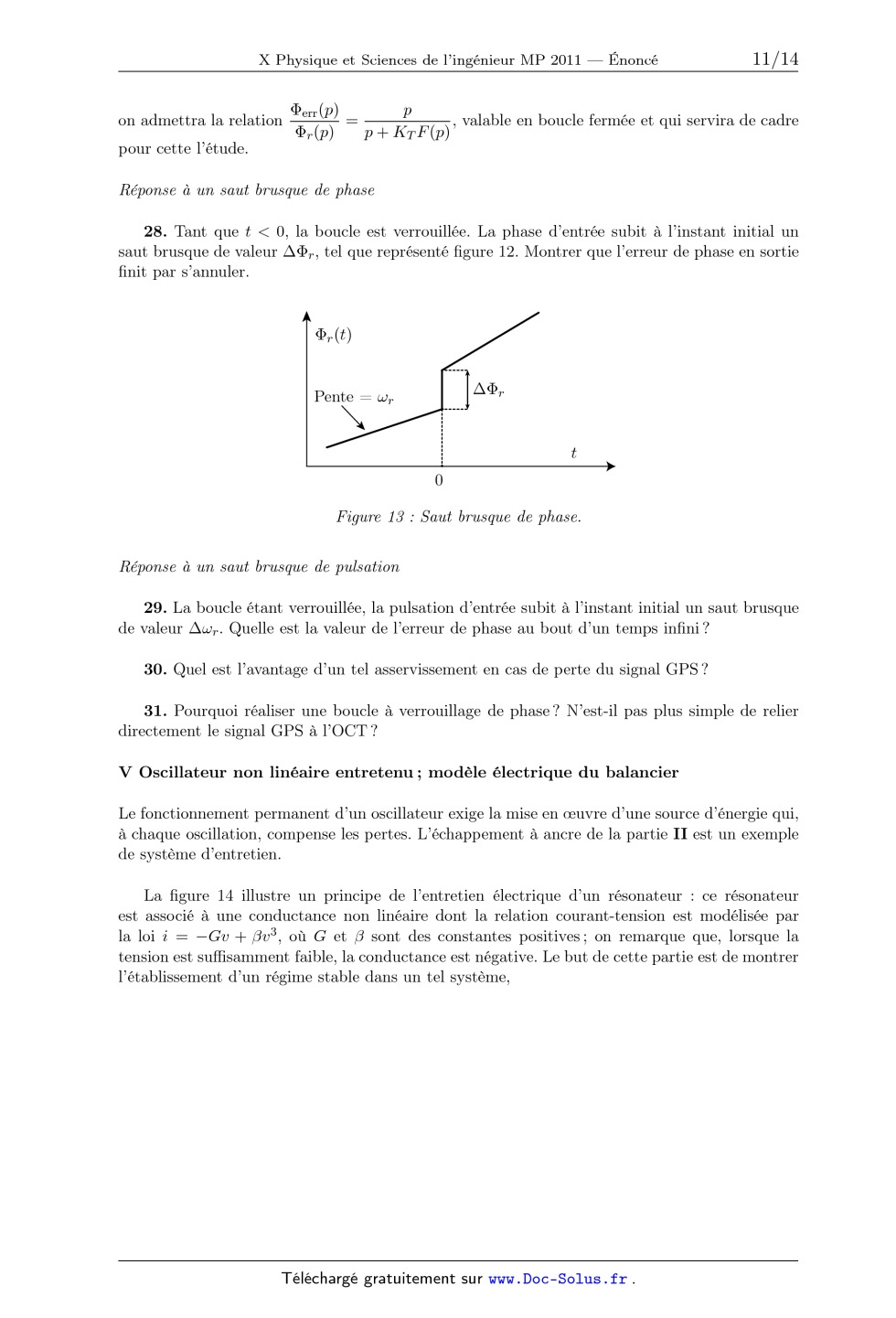
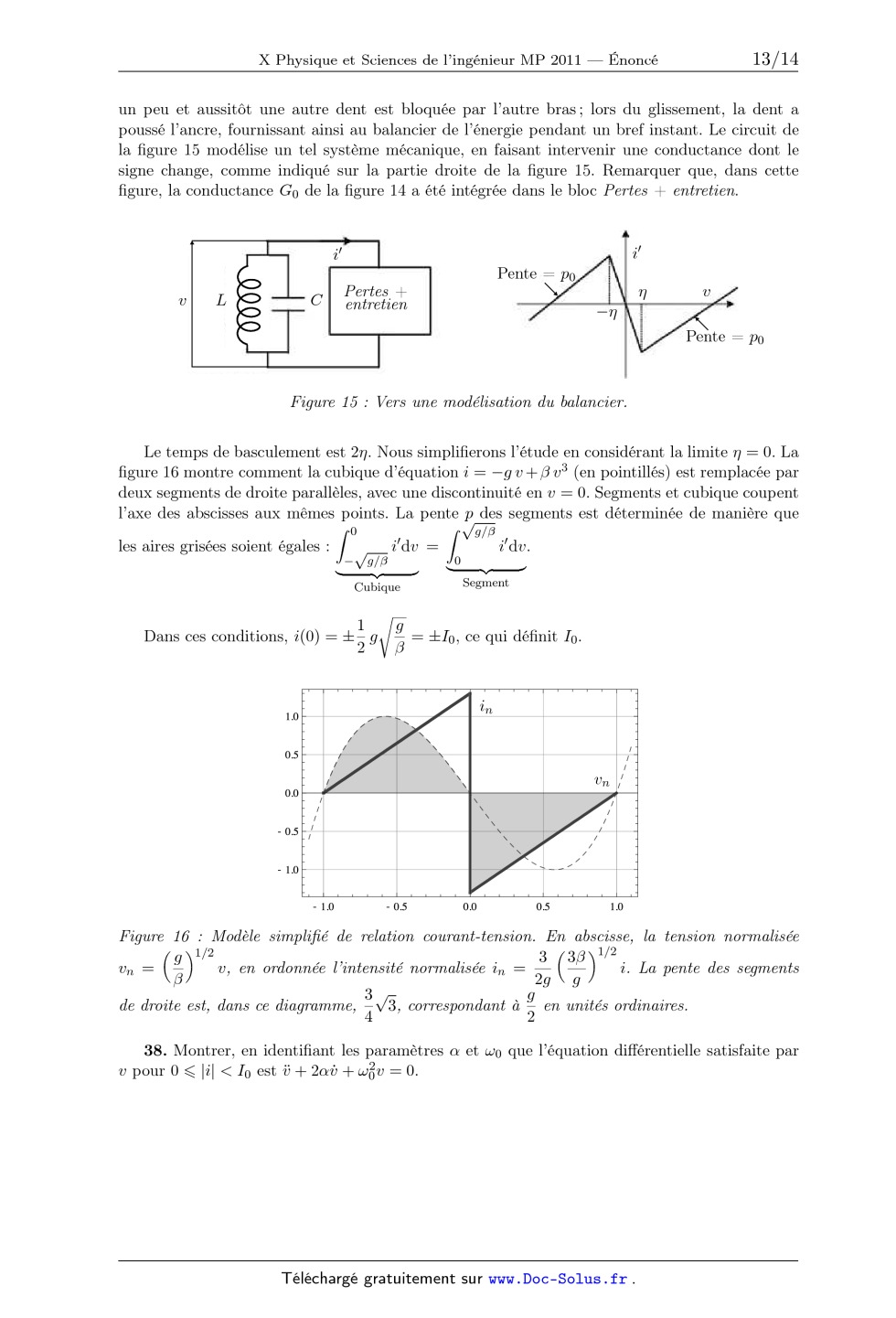
22. Pour t < 0, vr (t) = 0, la tension au sortir du multiplieur est nulle et l'OCT oscille à sa fréquence libre 0 . Au temps t = 0, le signal vr (t) = Vr cos[(0 + )t] est appliqué à l'une des entrées du multiplieur. On suppose satisfaite l'inégalité | | 1 ; on constate que la boucle 9 se verrouille. Montrer que ce verrouillage peut s'effectuer sur une bande de pulsations que l'on caractérisera qualitativement. Fonction de transfert en régime linéaire La figure 12 représente le schéma fonctionnel de la boucle et indique les lois de comportement des trois éléments, en fonction de la coordonnée de Laplace p : le comparateur de phase, représenté par un cercle, le filtre, dont la fonction de transfert est noté F et l'oscillateur contrôlé en tension. Ce dernier réalise donc une intégration entre la tension appliquée à son entrée et sa phase de sortie. r (p) verr (p) = KD err (p) F (p) err (p) = r (p) - Q (p) u(p) = F (p)verr (p) Q (p) Q (p) = K0 OCT u(p) p Figure 12 : Schéma fonctionnel de la boucle à verrouillage de phase. u(p) N (p) sous la forme , en déterminant r (p) 1 + (p)N (p) N (p) et (p). En déduire que la fonction de transfert entre la fréquence d'entrée r (p) et la u(p) KD F (p) tension de sortie u(p) est = . Comment nomme-t-on un tel système ? r (p) p + KD K0 F (p) 23. Exprimer la fonction de transfert 24. Le filtre utilisé est un filtre passif comportant un pôle, dont la fonction de transfert est 1 Q (p) F (p) = . Déterminer la fonction de transfert en boucle ouverte G0 (p) = en fonction 1 + p r (p) de F (p) et de KT = K0 KD . Représenter rapidement le diagramme de Bode correspondant. 25. Rappeler le sens pratique de la marge de phase et de la marge de gain. 26. Sous quelle condition sur KT la marge de phase est-elle de 45 ? Déterminer la pulsation pour laquelle le gain en boucle ouverte est unitaire, puis la valeur de KT telle que, pour cette fréquence, la marge de phase soit de 45 . c2 p2 + 2c p + c2 et donner les expressions de c et de en fonction de KT et de . Pour quelle valeur de KT la marge de phase est-elle égale à 45 ? Vérifier que, pour cette valeur, 0, 4. 27. Mettre la fonction de transfert en boucle fermée sous la forme G(p) = Réponse de la boucle à une perturbation soudaine On étudie ici la réponse d'une boucle à des variations de la grandeur d'entrée, soudaines, mais suffisamment petites pour que cette dernière reste verrouillée. En se référant à la figure 12, 10 on admettra la relation err (p) p = , valable en boucle fermée et qui servira de cadre r (p) p + KT F (p) pour cette l'étude. Réponse à un saut brusque de phase 28. Tant que t < 0, la boucle est verrouillée. La phase d'entrée subit à l'instant initial un saut brusque de valeur r , tel que représenté figure 12. Montrer que l'erreur de phase en sortie finit par s'annuler. r (t) r Pente = r t 0 Figure 13 : Saut brusque de phase. Réponse à un saut brusque de pulsation 29. La boucle étant verrouillée, la pulsation d'entrée subit à l'instant initial un saut brusque de valeur r . Quelle est la valeur de l'erreur de phase au bout d'un temps infini ? 30. Quel est l'avantage d'un tel asservissement en cas de perte du signal GPS ? 31. Pourquoi réaliser une boucle à verrouillage de phase ? N'est-il pas plus simple de relier directement le signal GPS à l'OCT ? V Oscillateur non linéaire entretenu ; modèle électrique du balancier Le fonctionnement permanent d'un oscillateur exige la mise en oeuvre d'une source d'énergie qui, à chaque oscillation, compense les pertes. L'échappement à ancre de la partie II est un exemple de système d'entretien. La figure 14 illustre un principe de l'entretien électrique d'un résonateur : ce résonateur est associé à une conductance non linéaire dont la relation courant-tension est modélisée par la loi i = -Gv + v 3 , où G et sont des constantes positives ; on remarque que, lorsque la tension est suffisamment faible, la conductance est négative. Le but de cette partie est de montrer l'établissement d'un régime stable dans un tel système, 11 v L C G0 i = -Gv + bv 3 Figure 14 : Entretien d'un oscillateur par conductance négative et non linéarité. 3 32. Montrer que avec l'entrée en tension sinusoïdale v = V sin(t), i -G + V 2 v ; on 4 rappelle l'identité sin(3u) = 3 sin u - 4 sin3 (u). Pourquoi est-il en général réaliste de négliger le terme à la pulsation 3 ? Å ã 33. En effectuant l'analyse du système en régime sinusoïdal de pulsation , donner l'expression de son admittance complexe Y = g1 + jx1 en fonction de L, C, G0 , G, et V . En déduire que, en régime d'oscillation entretenue, la pulsation et l'amplitude du régime sont fixées : 1 4 G - G0 4 g = 0 = et V = V0 = = (ce qui définit g = G - G0 ). 3 3 LC 34. Expliquer pourquoi, en régime de petits signaux, l'oscillateur démarre. 35. Pour l'analyse du régime transitoire, on pose v(t) = V (t) sin(0 t) où l'amplitude V (t), que l'on supposera toujours positive, varie très lentement par rapport à sin(0 t). Admettant les relations caractérisant le facteur de qualité Q = Q = 2 W (t) Ä W t+ 2 0 ä - W (t) 1 g1 C 4C0 = et L 3(V02 - V 2 ) , où W (t) est l'énergie accumulée à l'instant t, établir l'équation différentielle (que l'on ne cherchera pas à résoudre) 1 dV 3 2 = (V - V 2 ). V dt 8C 0 Retrouver ce résultat à partir de l'expression de la valeur moyenne temporelle de l'énergie dW 3 accumulée dans le système LC et de la relation, que l'on établira, = -(G0 - G + V 2 )v 2 . dt 4 dV 36. On note V1 la valeur initiale de V (t). Quel est le signe de ? Montrer, sans dt t=0 intégrer l'équation différentielle établie à la question 35, que lim V (t) = V0 . Å ã t 37. Montrer que le circuit de la figure 14 est décrit par l'équation différentielle non linéaire 2 v - (1 - 2 v 2 )v + 02 v = 0 : exprimer 0 , et en fonction de L, C, g et ; vérifier que = . V0 Reprenons la description de l'échappement à ancre (figure 4). Le ressort fait tourner une roue dentée. L'ancre bloque la roue par un de ses bras qui frotte sur une dent. Ce blocage accroit l'amortissement. Au passage par une certaine position, la dent s'échappe, la roue tourne 12 un peu et aussitôt une autre dent est bloquée par l'autre bras ; lors du glissement, la dent a poussé l'ancre, fournissant ainsi au balancier de l'énergie pendant un bref instant. Le circuit de la figure 15 modélise un tel système mécanique, en faisant intervenir une conductance dont le signe change, comme indiqué sur la partie droite de la figure 15. Remarquer que, dans cette figure, la conductance G0 de la figure 14 a été intégrée dans le bloc Pertes + entretien. i i Pente = p0 v L Pertes + entretien C - v Pente = p0 Figure 15 : Vers une modélisation du balancier. Le temps de basculement est 2. Nous simplifierons l'étude en considérant la limite = 0. La figure 16 montre comment la cubique d'équation i = -g v + v 3 (en pointillés) est remplacée par deux segments de droite parallèles, avec une discontinuité en v = 0. Segments et cubique coupent l'axe des abscisses aux mêmes points. La pente p des segments est déterminée de manière que les aires grisées soient égales : Z 0 g/ | {z - i dv = g/ i dv . 0 Cubique 1 Dans ces conditions, i(0) = ± g 2 Z } | {z Segment } g = ±I0 , ce qui définit I0 . in vn Figure 16 : Modèle simplifié de relation courant-tension. En abscisse, la tension normalisée Å ã1/2 Å ã g 3 3 1/2 vn = v, en ordonnée l'intensité normalisée in = i. La pente des segments 2g g 3 g de droite est, dans ce diagramme, 3, correspondant à en unités ordinaires. 4 2 38. Montrer, en identifiant les paramètres et 0 que l'équation différentielle satisfaite par v pour 0 6 |i| < I0 est v + 2v + 02 v = 0. 13 39. On considère la solution satisfaisant v(0) = 0 et Å v(0) ã = S0 , (S0 > 0). Exprimer v(t) pour
0 6 t 6 , avec 2 = 02 - 2 . Quel est le signe de v
, dérivée de v juste avant t = ?
40. Considérant que l'intensité est continue dans l'inductance
dans
Å mais
ã pas Ånécessairement
ã
I0
le condensateur, montrer que la discontinuité de v est (v) = v
- v
= -2 .
+
-
C
41. À partir de l'instant t =
v
Å
ã
= 0 et v
Å
ã
+
Å
Å
ã
, les deux nouvelles conditions initiales sont donc
+
= S1 = -S0 exp -
I0
- 2 et ainsi de suite.
C
ã
Établir la relation de récurrence entre Sn+1 et Sn , valeurs de la dérivée de
la tension aux
points de discontinuité.
42. Vérifier que l'amplitude du régime permanent est S =
2I0
1
Å
ã.
C 1 - exp -
43. Représenter la trajectoire de l'oscillateur dans le plan (v, v).
14