
X Physique et Sciences de l'ingénieur MP 2010
| Thème de l'épreuve | Lecteurs optiques numériques |
| Principaux outils utilisés | optique géométrique, ondes |
| Mots clefs | asservissements, astigmatisme |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - -
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)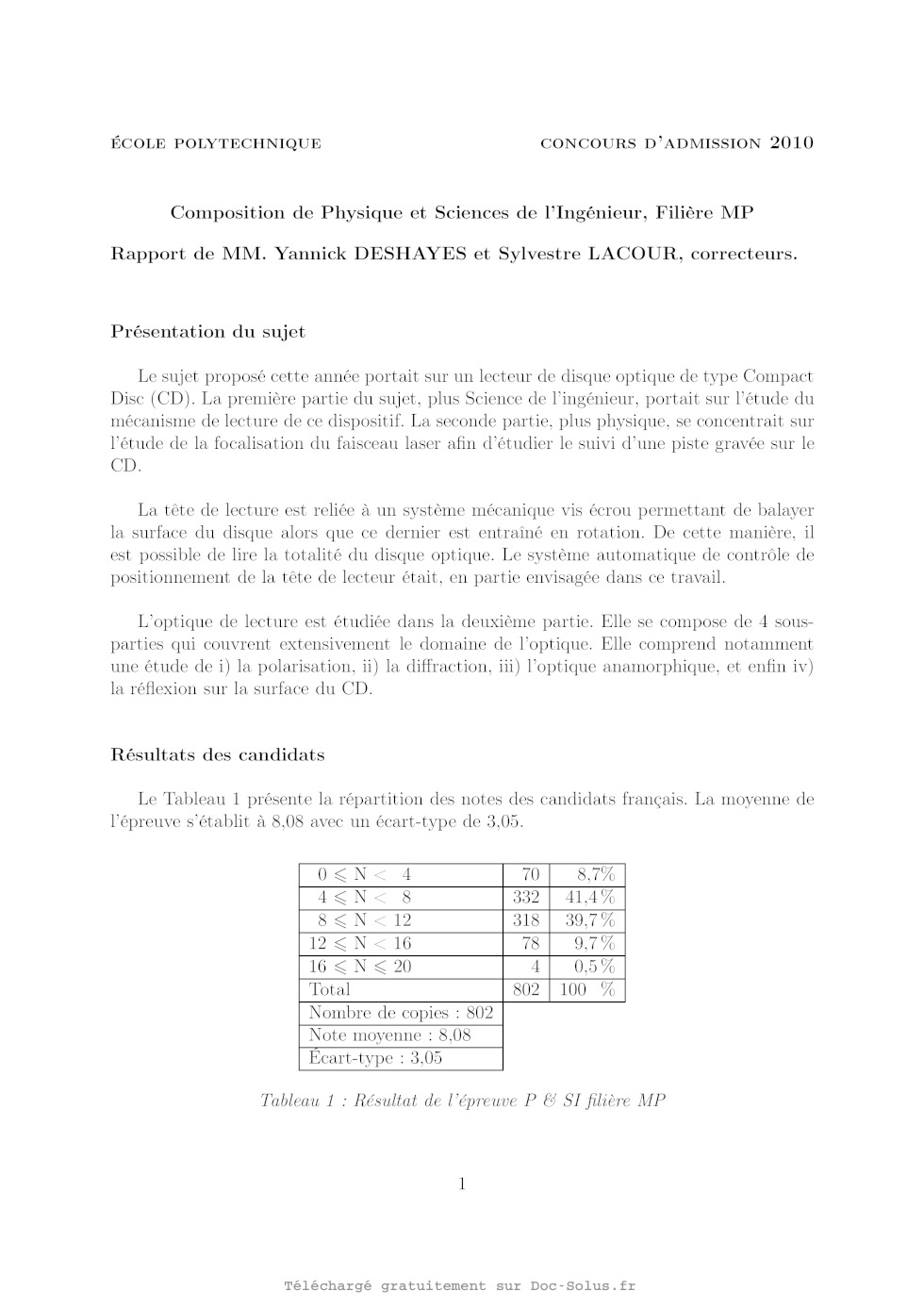

Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
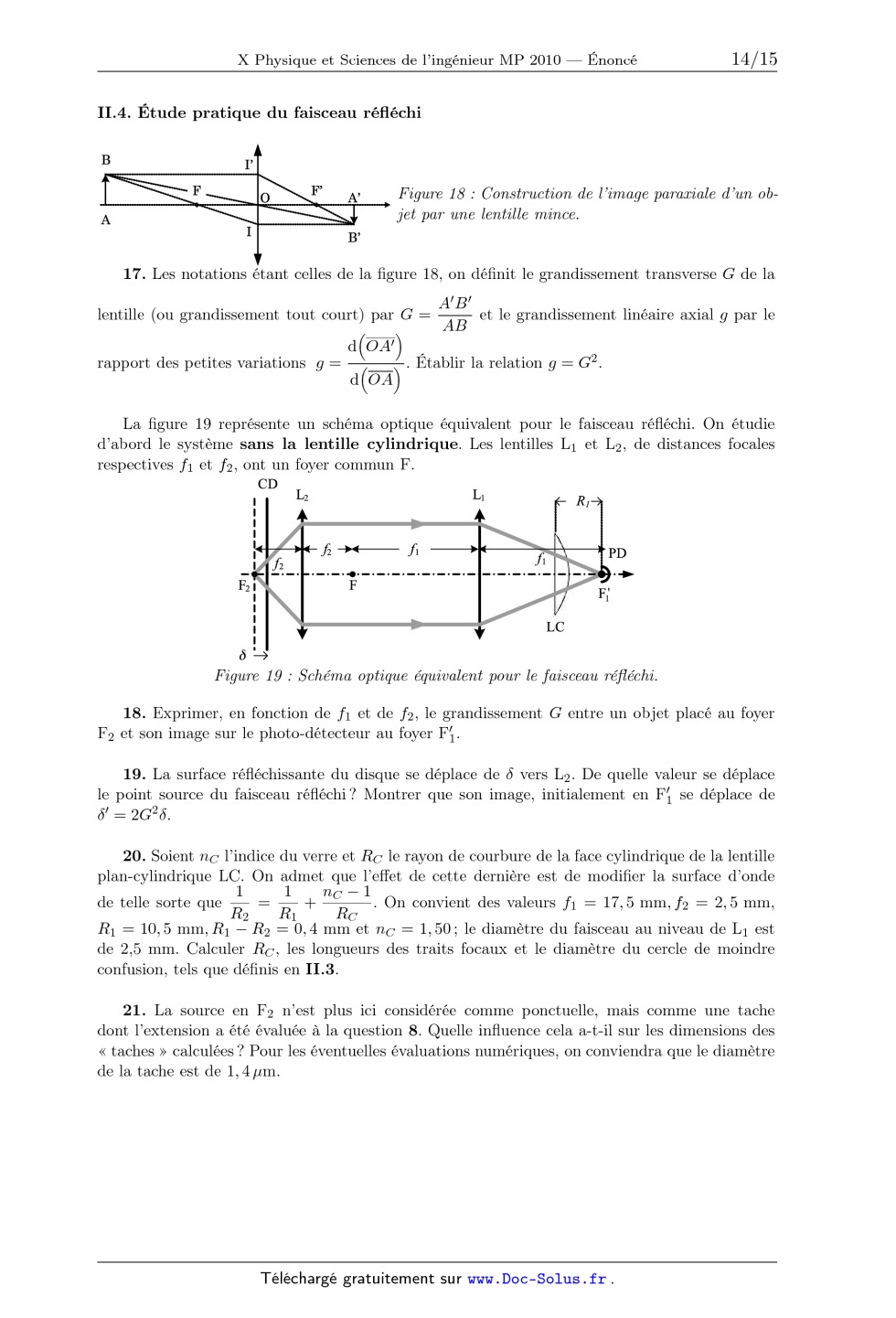
FILIÈRE MP
Option Physique et Sciences de l'Ingénieur
CONCOURS D'ADMISSION 2010
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGÉNIEUR
(Durée : 4 heures)
L'utilisation des calculatrices est autorisée pour cette épreuve.
Lecteurs optiques numériques
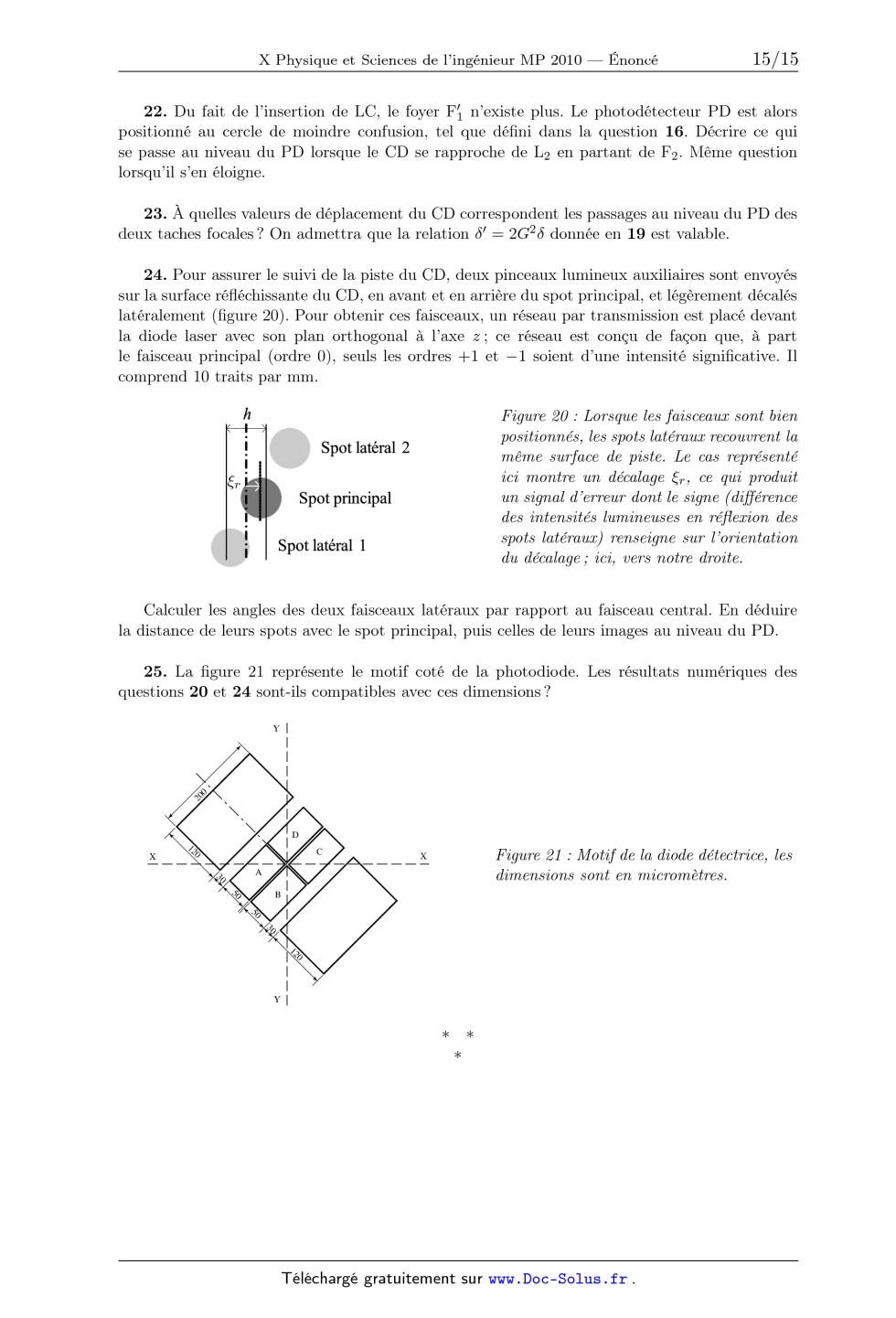
Le lecteur optique de disques CD ou DVD (figure 1) est un objet très répandu
dans l'équipement électronique. C'est un objet technologiquement complexe et
dont le fonctionnement fait
intervenir des aspects logiciels et matériels élaborés : optique d'éclairement
du disque, photodétection de la lumière en retour, asservissements de
focalisation, de maintien de faisceau sur la
piste et de maintien de la vitesse de défilement, codage et correction
d'erreurs. Cette épreuve
aborde, de manière élémentaire, quelques aspects des dispositifs optiques de
lecture et des dispositifs mécaniques de contrôle de déplacements.
Figure 1 : Disques compacts et DVD.
Le disque compact se présente sous la forme d'un disque de diamètre 120 mm et
d'épaisseur
1,2 mm, sur lequel est gravée l'information binaire, convenablement codée.
Cette gravure est
constituée de micro cuvettes, de largeur constante et de longueur variable. La
profondeur de ces
cuvettes est de l'ordre de quelques dizaines de nanomètres (figure 2).
Lors de la rotation du disque, les structures porteuses d'information binaire
défilent dans le
plan focal d'un dispositif optique. Ces structures diffractent et réfléchissent
le faisceau de lecture.
L'analyse des faisceaux en retour permet ainsi de remonter aux informations
enregistrées.
1
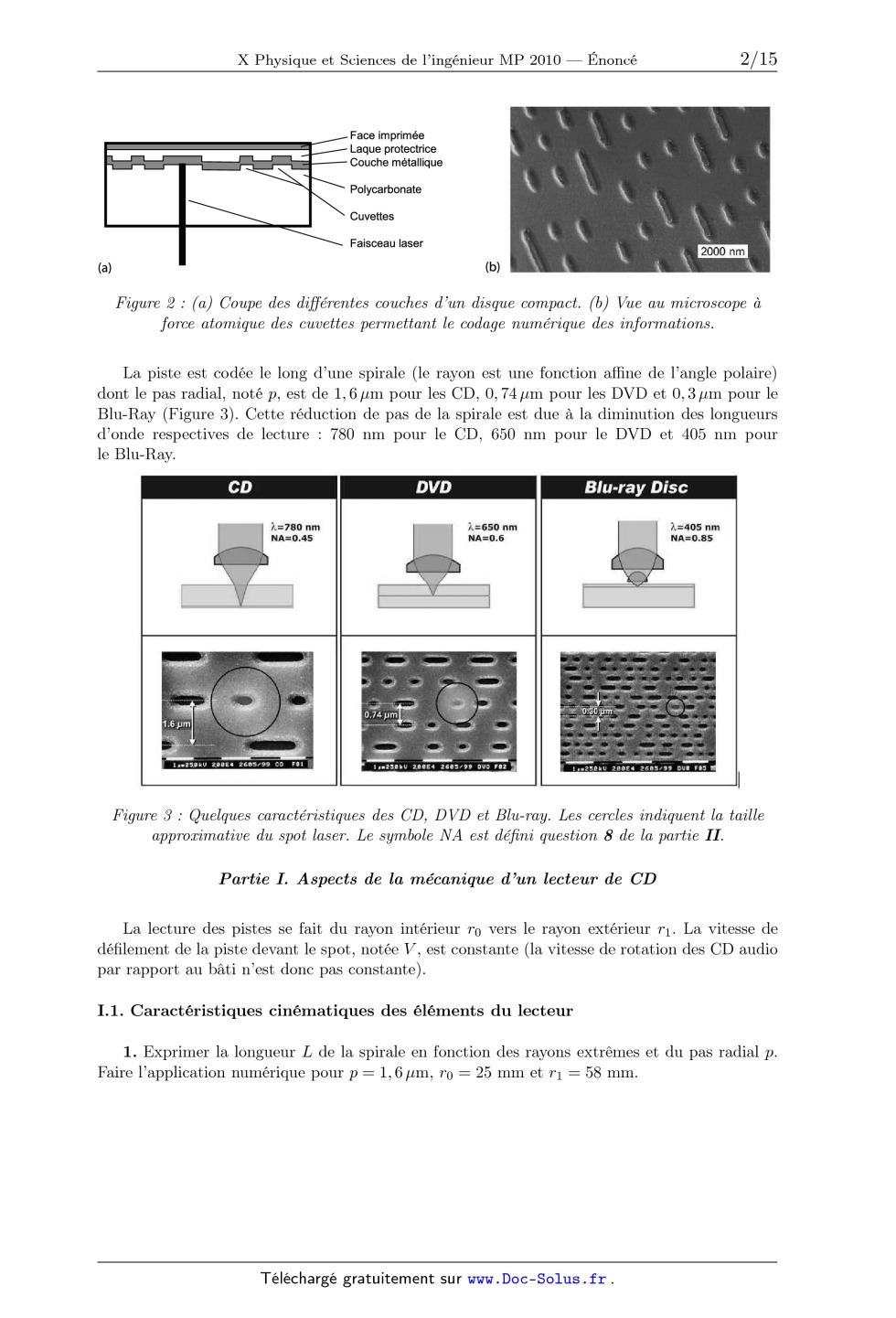
Figure 2 : (a) Coupe des différentes couches d'un disque compact. (b) Vue au
microscope à
force atomique des cuvettes permettant le codage numérique des informations.
La piste est codée le long d'une spirale (le rayon est une fonction affine de
l'angle polaire)
dont le pas radial, noté p, est de 1, 6 µm pour les CD, 0, 74 µm pour les DVD
et 0, 3 µm pour le
Blu-Ray (Figure 3). Cette réduction de pas de la spirale est due à la
diminution des longueurs
d'onde respectives de lecture : 780 nm pour le CD, 650 nm pour le DVD et 405 nm
pour
le Blu-Ray.
Figure 3 : Quelques caractéristiques des CD, DVD et Blu-ray. Les cercles
indiquent la taille
approximative du spot laser. Le symbole NA est défini question 8 de la partie
II.
Partie I. Aspects de la mécanique d'un lecteur de CD
La lecture des pistes se fait du rayon intérieur r0 vers le rayon extérieur r1
. La vitesse de
défilement de la piste devant le spot, notée V , est constante (la vitesse de
rotation des CD audio
par rapport au bâti n'est donc pas constante).
I.1. Caractéristiques cinématiques des éléments du lecteur
1. Exprimer la longueur L de la spirale en fonction des rayons extrêmes et du
pas radial p.
Faire l'application numérique pour p = 1, 6 µm, r0 = 25 mm et r1 = 58 mm.
2. Quelle est alors la durée maximale T de lecture audio ? Faire l'application
numérique pour
V = 1, 2 m · s-1 .
3. Comment évolue la vitesse de rotation (r) du disque par rapport au bâti ?
Tracer l'allure
de cette évolution en fonction de la position r du spot et préciser les valeurs
0 et 1 qui
correspondent aux rayons r0 et r1 . On exprimera ces vitesses en radian par
seconde puis en tour
par minute.
4. Comment évolue la vitesse radiale u(r) du spot ? Préciser les valeurs u0 et
u1 qui correspondent aux rayons r0 et r1 . On exprimera ces vitesses en
micromètre par seconde.
I.2. Une solution technologique pour le déplacement du spot laser
Le déplacement radial du spot est réalisé de différentes manières suivant les
modèles de
lecteur. Généralement, la lentille focalisatrice et son support sont installés
sur un chariot qui se
translate radialement par rapport au carter du lecteur (figure 4) sur le
domaine [r0 , r1 ].
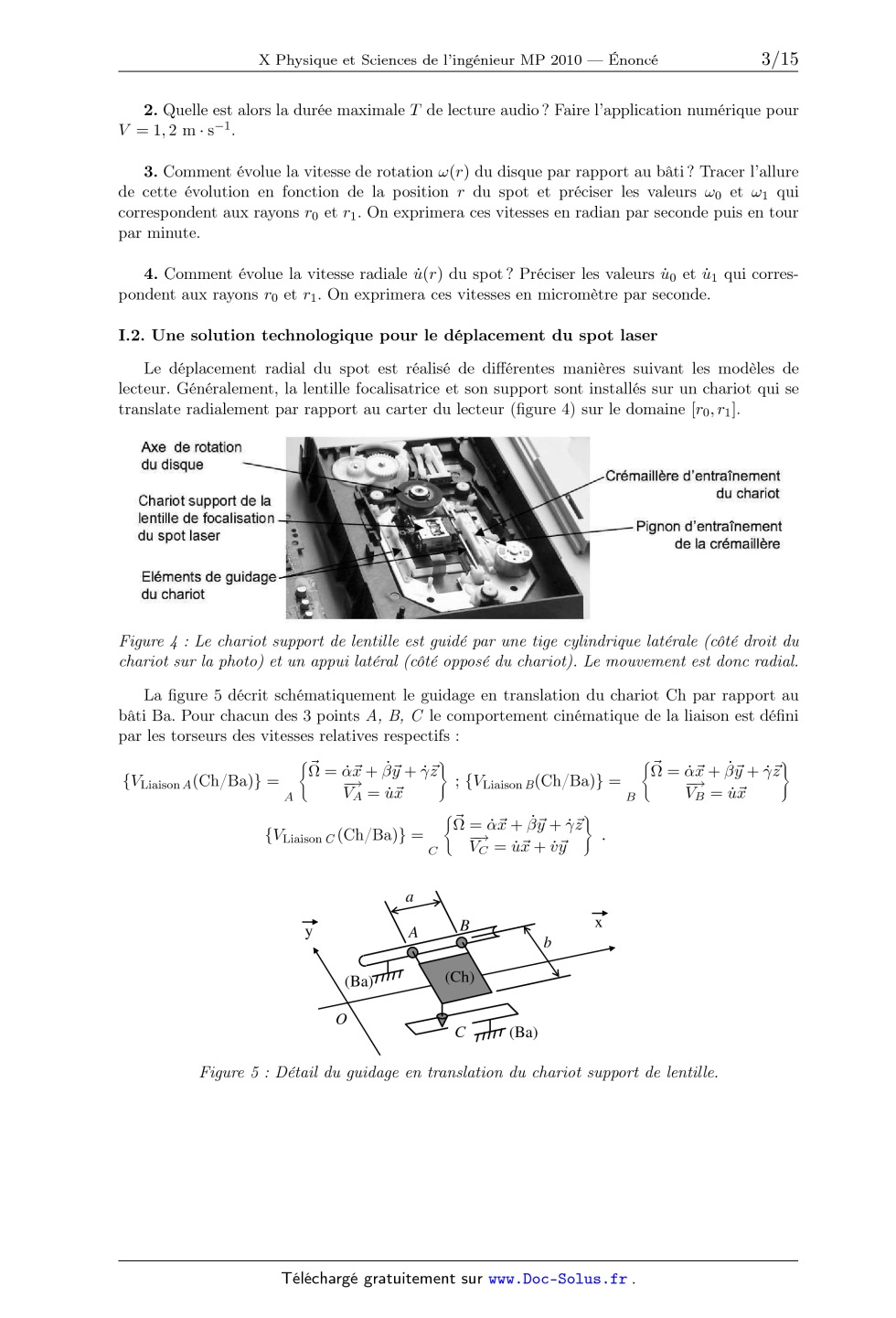
Figure 4 : Le chariot support de lentille est guidé par une tige cylindrique
latérale (côté droit du
chariot sur la photo) et un appui latéral (côté opposé du chariot). Le
mouvement est donc radial.
La figure 5 décrit schématiquement le guidage en translation du chariot Ch par
rapport au
bâti Ba. Pour chacun des 3 points A, B, C le comportement cinématique de la
liaison est défini
par les torseurs des vitesses relatives respectifs :
{VLiaison A (Ch/Ba)} =
A
®
~ = ~x + ~y + ~z
-
VA = u~x
{VLiaison C (Ch/Ba)} =
C
´
; {VLiaison B (Ch/Ba)} =
®
~ = ~x + ~y + ~z
-
VC = u~x + v~y
B
´
~ = ~x + ~y + ~z
-
VB = u~x
®
.
a
y
A
(Ba)
x
B
b
(Ch)
O
C
(Ba)
Figure 5 : Détail du guidage en translation du chariot support de lentille.
´
5. Donner le nom de chacune des trois liaisons et faire un graphe de liaisons
montrant
comment le chariot (Ch) est relié au bâti du lecteur (Ba).
6. Montrer que l'ensemble constitué des 3 liaisons en A, B et C est équivalent
à une liaison
dont on précisera le nom et le torseur cinématique en A.
7. Préciser le degré d'hyperstatisme h de cette réalisation. Commentez le
résultat.
I.3. Dynamique du déplacement radial du chariot
Le déplacement est commandé par un moteur rotatif dont la vitesse est réduite
fortement de
telle sorte que la vitesse radiale du spot soit comprise dans la plage
déterminée à la question 4.
Le moteur rotatif entraîne la vis d'un engrenage roue et vis sans fin à une
vitesse de rotation 1 .
On note Im le moment d'inertie du moteur autour de son axe de rotation et Cm le
couple que
le stator exerce sur le rotor de ce moteur. On note Kt la rigidité en torsion
de l'axe qui relie le
moteur au train d'engrenages.
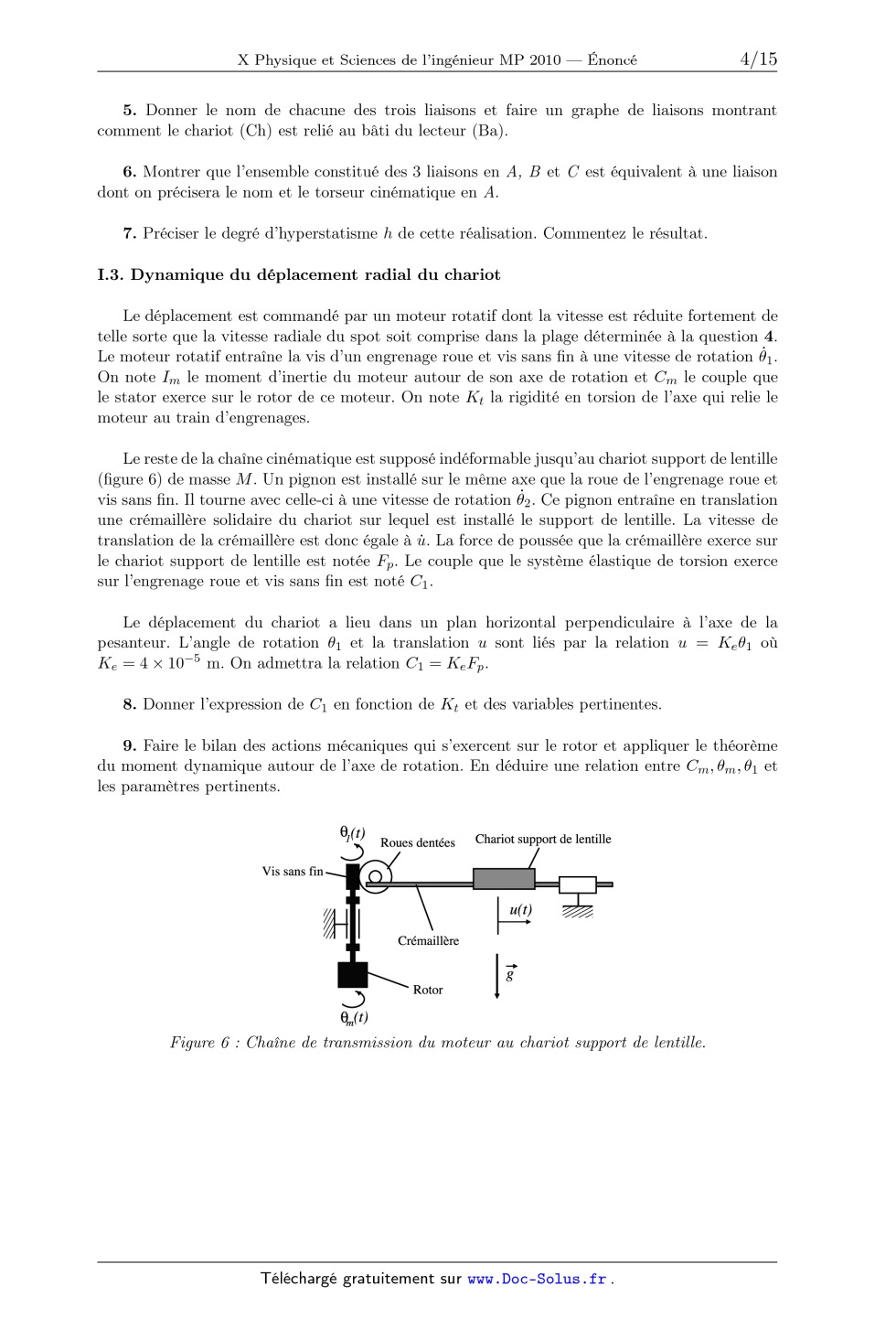
Le reste de la chaîne cinématique est supposé indéformable jusqu'au chariot
support de lentille
(figure 6) de masse M . Un pignon est installé sur le même axe que la roue de
l'engrenage roue et
vis sans fin. Il tourne avec celle-ci à une vitesse de rotation 2 . Ce pignon
entraîne en translation
une crémaillère solidaire du chariot sur lequel est installé le support de
lentille. La vitesse de
translation de la crémaillère est donc égale à u. La force de poussée que la
crémaillère exerce sur
le chariot support de lentille est notée Fp . Le couple que le système
élastique de torsion exerce
sur l'engrenage roue et vis sans fin est noté C1 .
Le déplacement du chariot a lieu dans un plan horizontal perpendiculaire à
l'axe de la
pesanteur. L'angle de rotation 1 et la translation u sont liés par la relation
u = Ke 1 où
Ke = 4 × 10-5 m. On admettra la relation C1 = Ke Fp .
8. Donner l'expression de C1 en fonction de Kt et des variables pertinentes.
9. Faire le bilan des actions mécaniques qui s'exercent sur le rotor et
appliquer le théorème
du moment dynamique autour de l'axe de rotation. En déduire une relation entre
Cm , m , 1 et
les paramètres pertinents.
Figure 6 : Chaîne de transmission du moteur au chariot support de lentille.
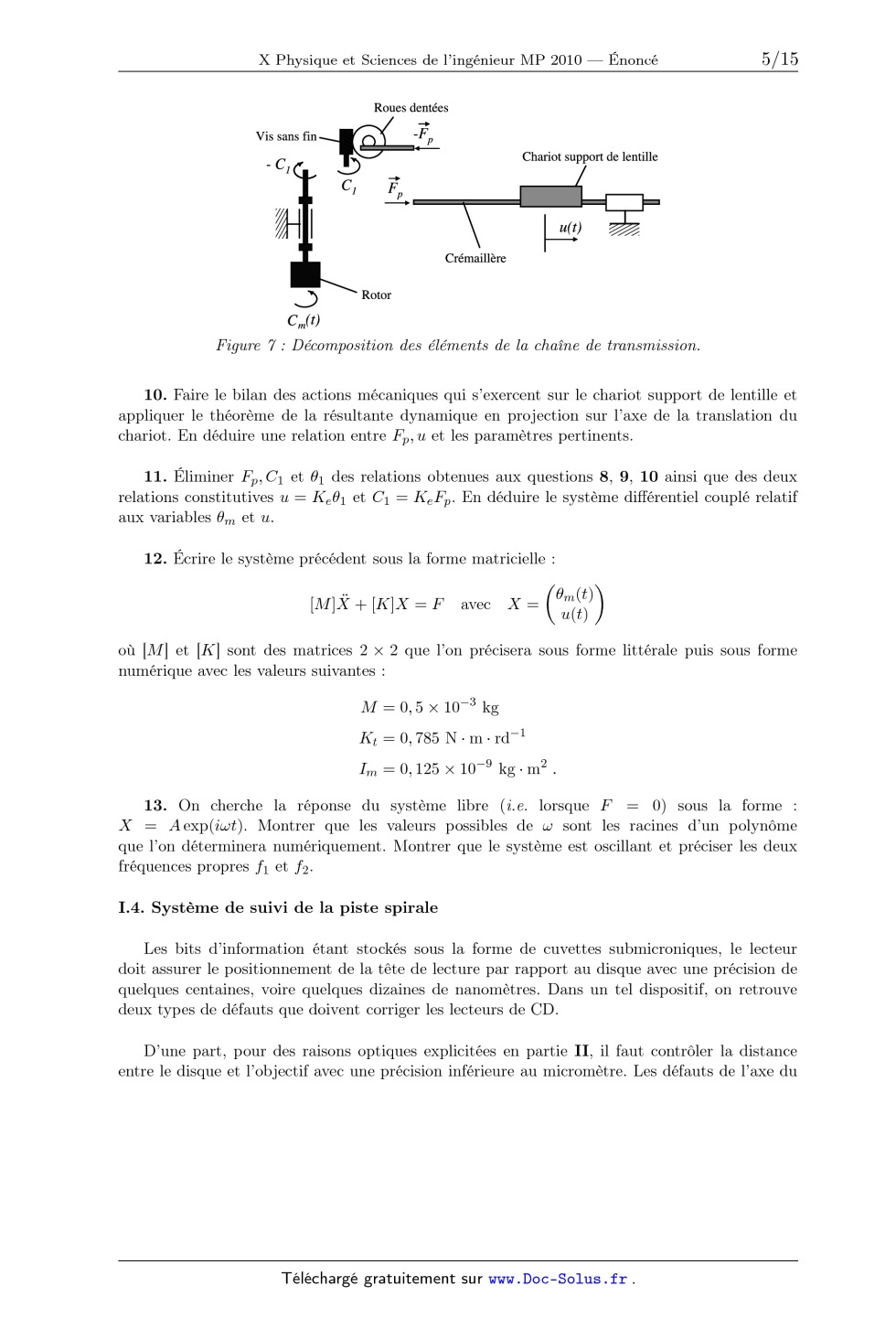
Figure 7 : Décomposition des éléments de la chaîne de transmission.
10. Faire le bilan des actions mécaniques qui s'exercent sur le chariot support
de lentille et
appliquer le théorème de la résultante dynamique en projection sur l'axe de la
translation du
chariot. En déduire une relation entre Fp , u et les paramètres pertinents.
11. Éliminer Fp , C1 et 1 des relations obtenues aux questions 8, 9, 10 ainsi
que des deux
relations constitutives u = Ke 1 et C1 = Ke Fp . En déduire le système
différentiel couplé relatif
aux variables m et u.
12. Écrire le système précédent sous la forme matricielle :
[M ]X + [K]X = F
avec X =
Ç
m (t)
u(t)
å
où [M ] et [K] sont des matrices 2 × 2 que l'on précisera sous forme littérale
puis sous forme
numérique avec les valeurs suivantes :
M = 0, 5 × 10-3 kg
Kt = 0, 785 N · m · rd-1
Im = 0, 125 × 10-9 kg · m2 .
13. On cherche la réponse du système libre (i.e. lorsque F = 0) sous la forme :
X = A exp(it). Montrer que les valeurs possibles de sont les racines d'un
polynôme
que l'on déterminera numériquement. Montrer que le système est oscillant et
préciser les deux
fréquences propres f1 et f2 .
I.4. Système de suivi de la piste spirale
Les bits d'information étant stockés sous la forme de cuvettes submicroniques,
le lecteur
doit assurer le positionnement de la tête de lecture par rapport au disque avec
une précision de
quelques centaines, voire quelques dizaines de nanomètres. Dans un tel
dispositif, on retrouve
deux types de défauts que doivent corriger les lecteurs de CD.
D'une part, pour des raisons optiques explicitées en partie II, il faut
contrôler la distance
entre le disque et l'objectif avec une précision inférieure au micromètre. Les
défauts de l'axe du
disque, les défauts de planéité du disque, les vibrations de la monture de
l'objectif modifient en
permanence la distance entre la lentille de focalisation et la surface
d'enregistrement du disque :
le réglage nécessaire est possible grâce au petit déplacement zf visualisé sur
la figure 8.
D'autre part, puisque les données sont arrangées le long d'une spirale dont le
pas est de
1, 6 µm pour un CD et que l'excentrement de cette spirale par rapport à l'axe
de rotation du
disque peut atteindre ±70 µm, il est nécessaire de compenser les mouvements
transversaux du
centre des pistes devant l'objectif lorsque le disque tourne devant celui-ci
(variable de position
xr sur la figure 8). On utilise souvent l'anglicisme « tracking » pour parler
de l'excentrement et
de sa régulation.
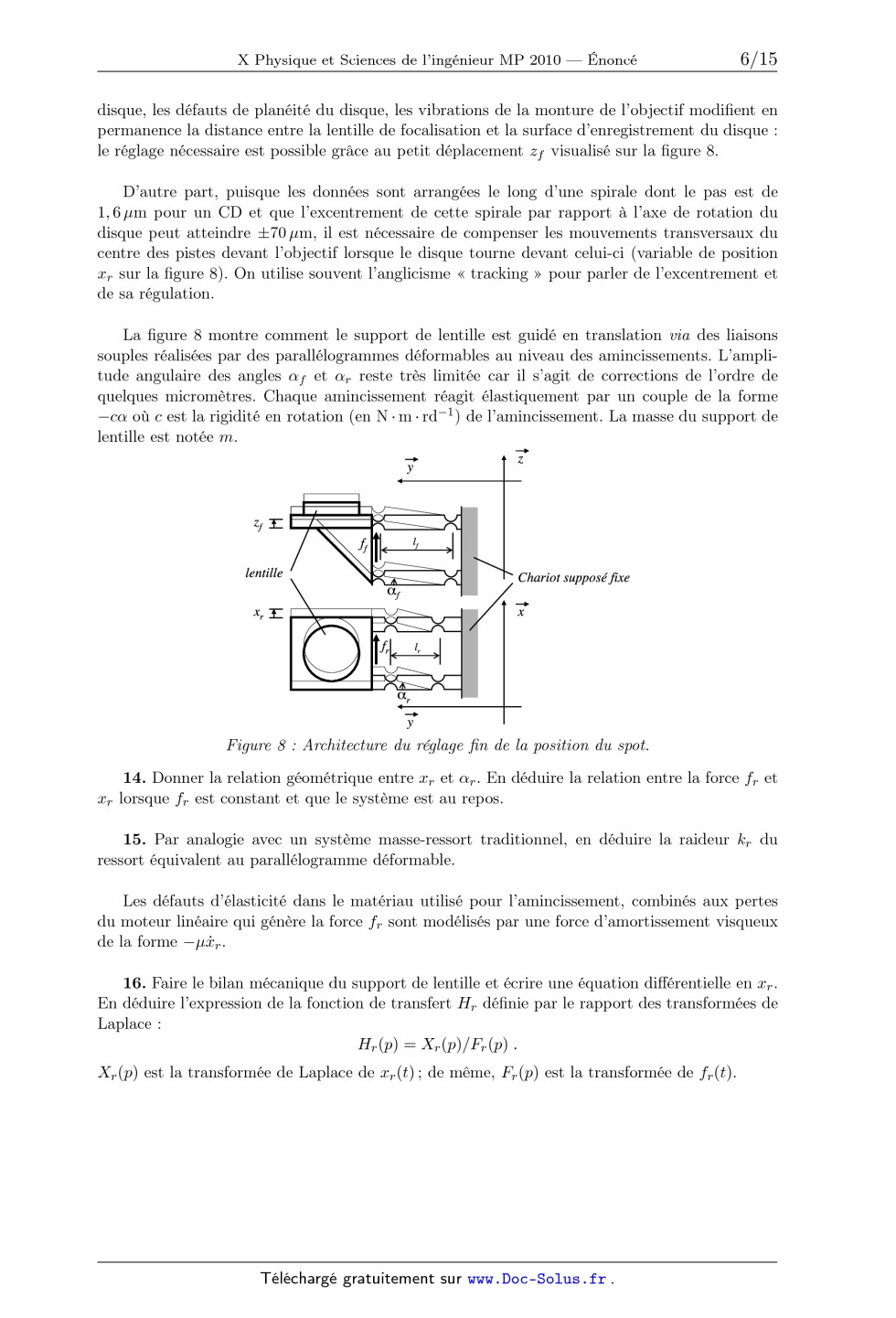
La figure 8 montre comment le support de lentille est guidé en translation via
des liaisons
souples réalisées par des parallélogrammes déformables au niveau des
amincissements. L'amplitude angulaire des angles f et r reste très limitée car
il s'agit de corrections de l'ordre de
quelques micromètres. Chaque amincissement réagit élastiquement par un couple
de la forme
-c où c est la rigidité en rotation (en N · m · rd-1 ) de l'amincissement. La
masse du support de
lentille est notée m.
Figure 8 : Architecture du réglage fin de la position du spot.
14. Donner la relation géométrique entre xr et r . En déduire la relation entre
la force fr et
xr lorsque fr est constant et que le système est au repos.
15. Par analogie avec un système masse-ressort traditionnel, en déduire la
raideur kr du
ressort équivalent au parallélogramme déformable.
Les défauts d'élasticité dans le matériau utilisé pour l'amincissement,
combinés aux pertes
du moteur linéaire qui génère la force fr sont modélisés par une force
d'amortissement visqueux
de la forme -µxr .
16. Faire le bilan mécanique du support de lentille et écrire une équation
différentielle en xr .
En déduire l'expression de la fonction de transfert Hr définie par le rapport
des transformées de
Laplace :
Hr (p) = Xr (p)/Fr (p) .
Xr (p) est la transformée de Laplace de xr (t) ; de même, Fr (p) est la
transformée de fr (t).
6
u(t)
Transformateur
Kb
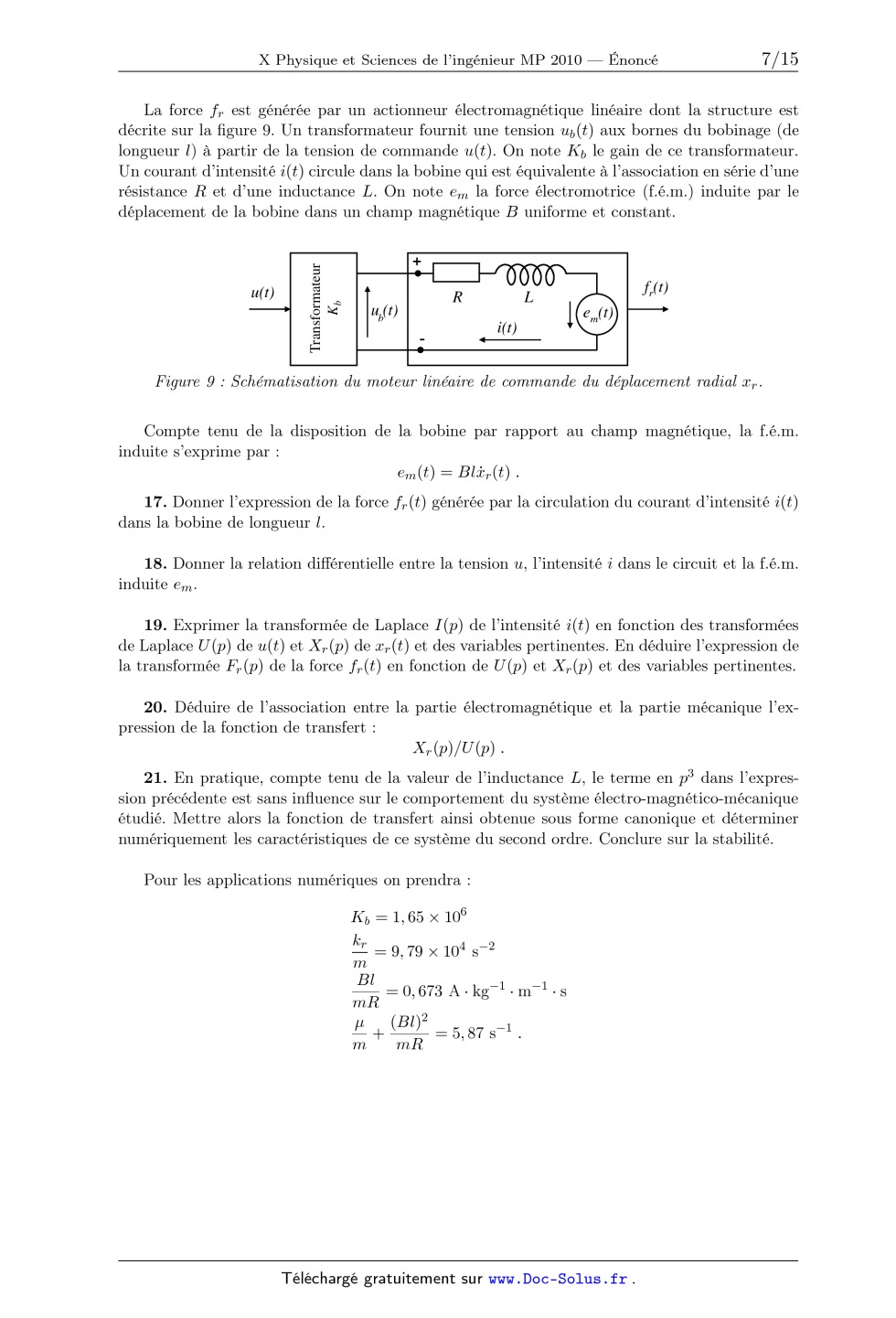
La force fr est générée par un actionneur électromagnétique linéaire dont la
structure est
décrite sur la figure 9. Un transformateur fournit une tension ub (t) aux
bornes du bobinage (de
longueur l) à partir de la tension de commande u(t). On note Kb le gain de ce
transformateur.
Un courant d'intensité i(t) circule dans la bobine qui est équivalente à
l'association en série d'une
résistance R et d'une inductance L. On note em la force électromotrice (f.é.m.)
induite par le
déplacement de la bobine dans un champ magnétique B uniforme et constant.
ub(t)
R
fr(t)
L
i(t)
em(t)
Figure 9 : Schématisation du moteur linéaire de commande du déplacement radial
xr .
Compte tenu de la disposition de la bobine par rapport au champ magnétique, la
f.é.m.
induite s'exprime par :
em (t) = Blxr (t) .
17. Donner l'expression de la force fr (t) générée par la circulation du
courant d'intensité i(t)
dans la bobine de longueur l.
18. Donner la relation différentielle entre la tension u, l'intensité i dans le
circuit et la f.é.m.
induite em .
19. Exprimer la transformée de Laplace I(p) de l'intensité i(t) en fonction des
transformées
de Laplace U (p) de u(t) et Xr (p) de xr (t) et des variables pertinentes. En
déduire l'expression de
la transformée Fr (p) de la force fr (t) en fonction de U (p) et Xr (p) et des
variables pertinentes.
20. Déduire de l'association entre la partie électromagnétique et la partie
mécanique l'expression de la fonction de transfert :
Xr (p)/U (p) .
21. En pratique, compte tenu de la valeur de l'inductance L, le terme en p3
dans l'expression précédente est sans influence sur le comportement du système
électro-magnético-mécanique
étudié. Mettre alors la fonction de transfert ainsi obtenue sous forme
canonique et déterminer
numériquement les caractéristiques de ce système du second ordre. Conclure sur
la stabilité.
Pour les applications numériques on prendra :
Kb = 1, 65 × 106
kr
= 9, 79 × 104 s-2
m
Bl
= 0, 673 A · kg-1 · m-1 · s
mR
µ
(Bl)2
+
= 5, 87 s-1 .
m
mR
7
I.5. Asservissements du suivi de la piste spirale ou de focalisation
Les deux asservissements (focalisation et tracking) fonctionnent sur le même
principe :
mesure de la perturbation géométrique, c'est-à-dire du défaut de position en
focalisation
ou en excentrement,
régulation électronique ou asservissement,
déplacement électromécanique de l'objectif par rapport à l'échantillon pour
compenser la
perturbation détectée.
Dans un cas général de régulation, l'asservissement peut être représenté par le
diagramme de
la figure 10.
Perturbation X(p)
+
-
Erreur
(p)
Position Y(p)
H(p)
Figure 10 : Représentation générale de la régulation.
22. Donner l'expression de la fonction de transfert du dispositif ainsi que
celle de l'erreur.
Donner les critères de stabilité généraux d'un tel système.
La fonction de transfert H(p) est composée de trois fonctions de transfert de
base : H1 (p)
est la fonction de transfert de la détection du défaut de focalisation ou de
tracking, H2 (p) est
celle d'un amplificateur à marge de phase servant à stabiliser le système
régulé et H3 (p) est la
fonction de transfert de la commande de déplacement du système
électro-magnético-mécanique
(actuateur) étudiée à la partie précédente.
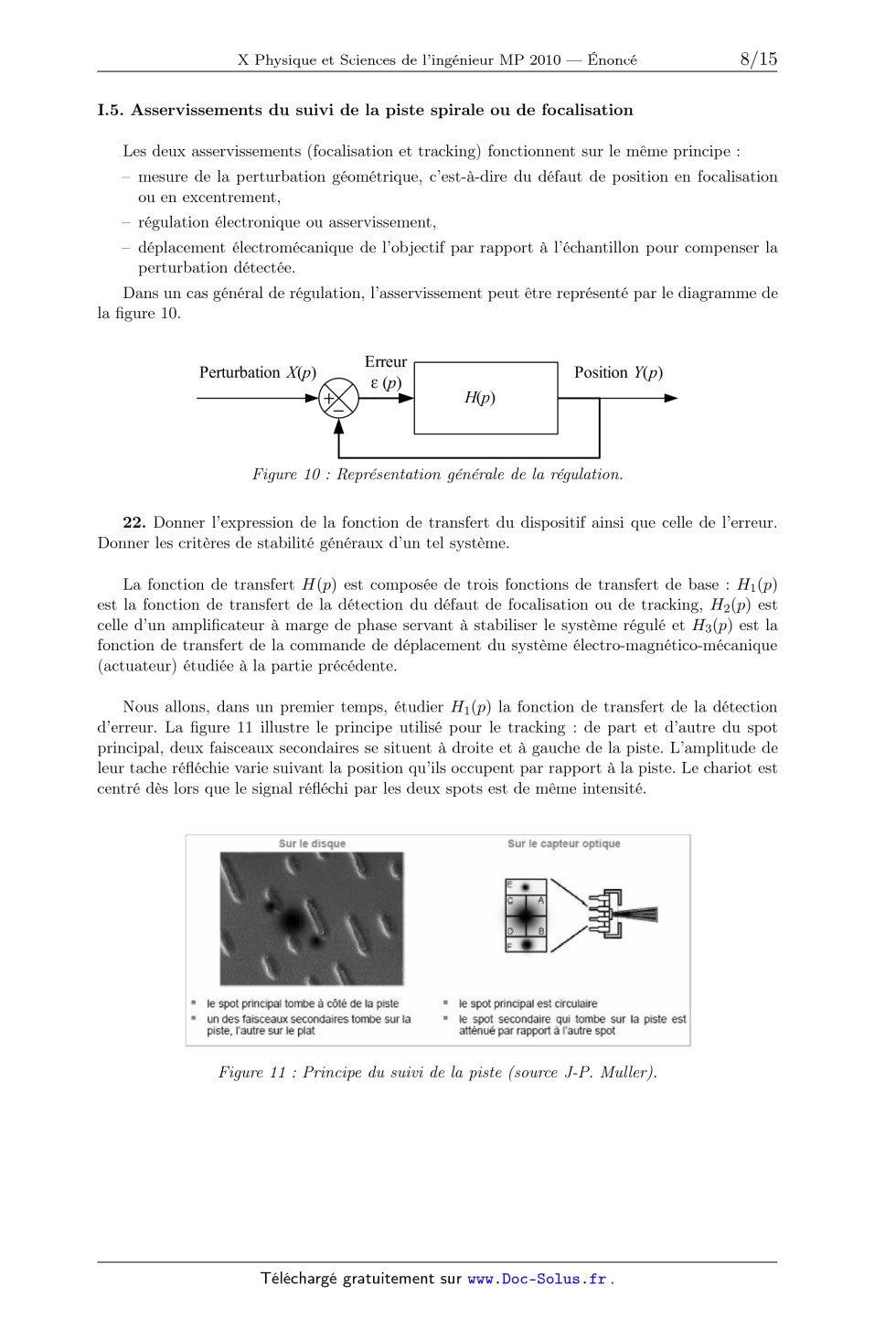
Nous allons, dans un premier temps, étudier H1 (p) la fonction de transfert de
la détection
d'erreur. La figure 11 illustre le principe utilisé pour le tracking : de part
et d'autre du spot
principal, deux faisceaux secondaires se situent à droite et à gauche de la
piste. L'amplitude de
leur tache réfléchie varie suivant la position qu'ils occupent par rapport à la
piste. Le chariot est
centré dès lors que le signal réfléchi par les deux spots est de même intensité.
Figure 11 : Principe du suivi de la piste (source J-P. Muller).
8
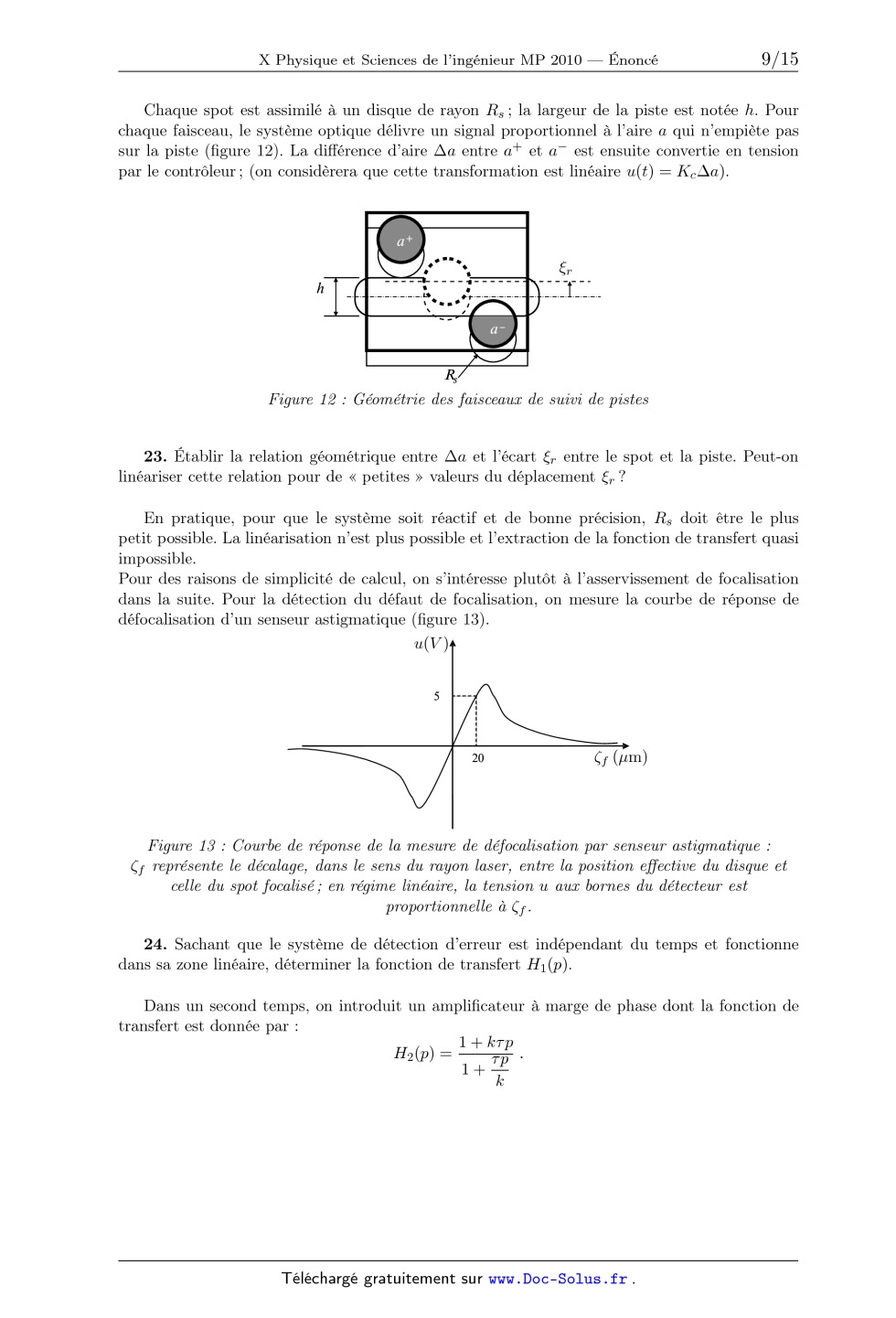
Chaque spot est assimilé à un disque de rayon Rs ; la largeur de la piste est
notée h. Pour
chaque faisceau, le système optique délivre un signal proportionnel à l'aire a
qui n'empiète pas
sur la piste (figure 12). La différence d'aire a entre a+ et a- est ensuite
convertie en tension
par le contrôleur ; (on considèrera que cette transformation est linéaire u(t)
= Kc a).
r
Figure 12 : Géométrie des faisceaux de suivi de pistes
23. Établir la relation géométrique entre a et l'écart r entre le spot et la
piste. Peut-on
linéariser cette relation pour de « petites » valeurs du déplacement r ?
En pratique, pour que le système soit réactif et de bonne précision, Rs doit
être le plus
petit possible. La linéarisation n'est plus possible et l'extraction de la
fonction de transfert quasi
impossible.
Pour des raisons de simplicité de calcul, on s'intéresse plutôt à
l'asservissement de focalisation
dans la suite. Pour la détection du défaut de focalisation, on mesure la courbe
de réponse de
défocalisation d'un senseur astigmatique (figure 13).
u(V )
f (µm)
Figure 13 : Courbe de réponse de la mesure de défocalisation par senseur
astigmatique :
f représente le décalage, dans le sens du rayon laser, entre la position
effective du disque et
celle du spot focalisé ; en régime linéaire, la tension u aux bornes du
détecteur est
proportionnelle à f .
24. Sachant que le système de détection d'erreur est indépendant du temps et
fonctionne
dans sa zone linéaire, déterminer la fonction de transfert H1 (p).
Dans un second temps, on introduit un amplificateur à marge de phase dont la
fonction de
transfert est donnée par :
1 + k p
H2 (p) =
p .
1+
k
25. Faire l'étude gain phase de la fonction de transfert H2 (p). Donner alors
la marge de
phase maximale ainsi que la valeur de p correspondante. On déterminera les
valeurs de k et à
l'issue de l'étude.
26. Par analogie avec la partie I.4, donner l'expression de la fonction de
transfert H3 (p) pour
la partie « focalisation » de l'actuateur. Faire le schéma complet du
dispositif régulé, étudier la
stabilité du système et déterminer alors les valeurs de k et afin d'obtenir
une marge de phase
de 85 . Les valeurs numériques des termes indicés « r » données en partie I.4
sont égales à celles
indicées « f » et utilisées ici.
Partie II. Aspects de la partie optique d'un lecteur de CD
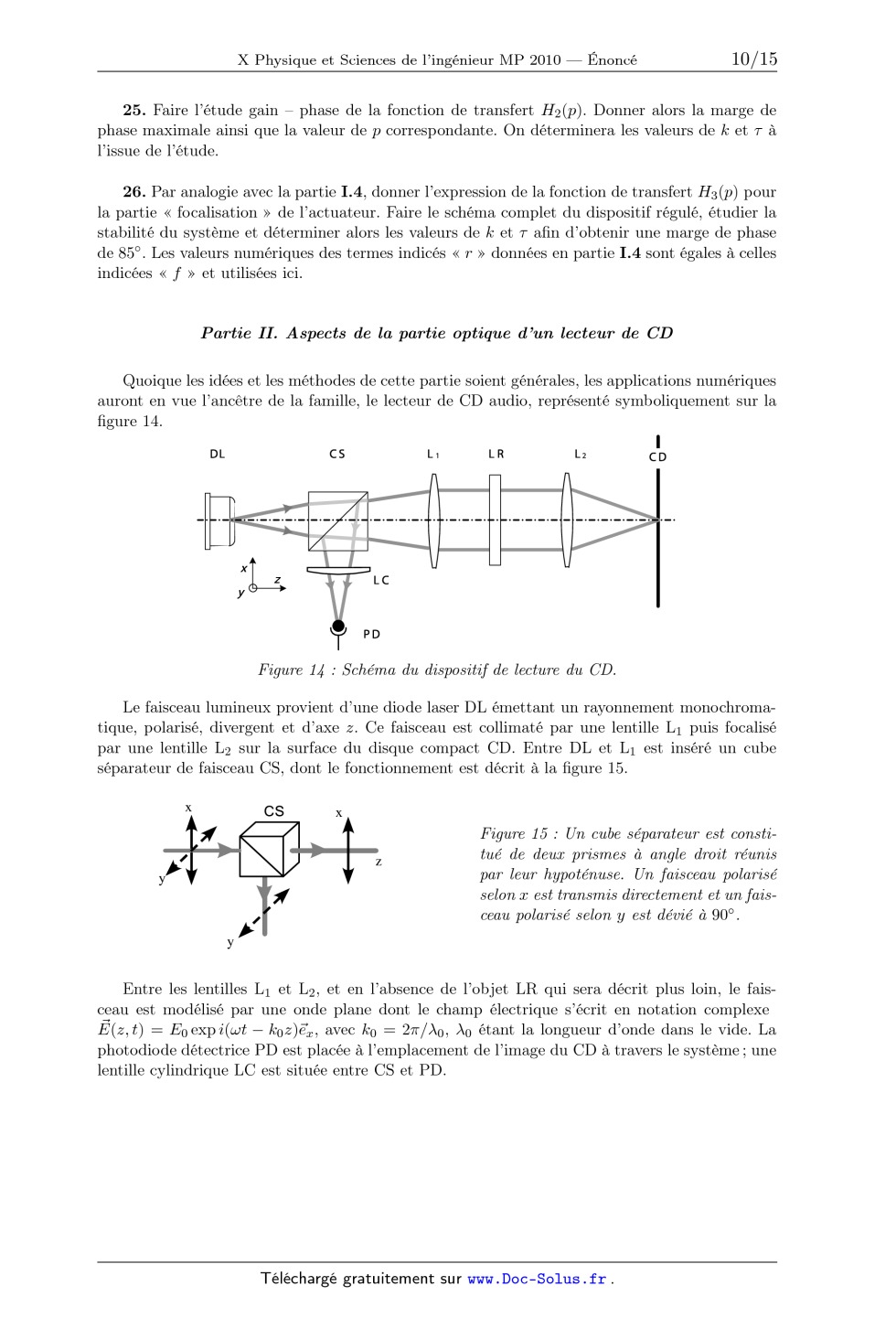
Quoique les idées et les méthodes de cette partie soient générales, les
applications numériques
auront en vue l'ancêtre de la famille, le lecteur de CD audio, représenté
symboliquement sur la
figure 14.
Figure 14 : Schéma du dispositif de lecture du CD.
Le faisceau lumineux provient d'une diode laser DL émettant un rayonnement
monochromatique, polarisé, divergent et d'axe z. Ce faisceau est collimaté par
une lentille L1 puis focalisé
par une lentille L2 sur la surface du disque compact CD. Entre DL et L1 est
inséré un cube
séparateur de faisceau CS, dont le fonctionnement est décrit à la figure 15.
x
x
Figure 15 : Un cube séparateur est constitué de deux prismes à angle droit
réunis
par leur hypoténuse. Un faisceau polarisé
selon x est transmis directement et un faisceau polarisé selon y est dévié à 90
.
z
y
y
Entre les lentilles L1 et L2 , et en l'absence de l'objet LR qui sera décrit
plus loin, le faisceau est modélisé par une onde plane dont le champ électrique
s'écrit en notation complexe
~ t) = E0 exp i(t - k0 z)~ex , avec k0 = 2/0 , 0 étant la longueur d'onde dans
le vide. La
E(z,
photodiode détectrice PD est placée à l'emplacement de l'image du CD à travers
le système ; une
lentille cylindrique LC est située entre CS et PD.
10
II.1. Isolateur optique
Entre les lentilles L1 et L2 , on place sur le trajet optique une lame à retard
LR, qui est une
lame à faces parallèles d'épaisseur d, optiquement anisotrope. Lorsque l'onde
incidente est polarisée rectilignement, l'onde sortante en général ne l'est
pas. Il existe cependant deux directions
incidentes de vibration du champ électrique pour lesquelles l'onde reste
polarisée rectilignement.
Ces directions sont orthogonales et associées à des indices différents, donc à
des vitesses de propagation différentes à l'intérieur de la lame. On les repère
par les vecteurs unitaires ~eL et ~eR avec
les indices respectifs nL et nR . La lame est orientée de façon que ~eL et ~eR
soient selon les deux
1
1
~ = EL~eL + ER~eR .
bissectrices de Ox et Oy : ~eL = ~ex + ~ey et ~eR = ~ex - ~ey . On pose E
2
2
1. Préciser l'expression du rapport ER /EL à l'entrée de la lame. Exprimer le
chemin optique
correspondant à la traversée de la lame pour
chacune
de ces deux composantes. En déduire leur
rapport en sortie de lame en fonction de nL - nR , k0 et d.
2. Calculer la valeur du déphasage entre les deux composantes pour 0 = 780 nm,
nL - nR = 8, 90 × 10-3 et d = 1, 250 mm ; donner une valeur approchée de leur
rapport ER /EL .
Pourquoi appelle-t-on une telle lame « quart-d'onde » ?
~ z0 , t dans le plan z = z0 . Quelle est la courbe
3. On représente graphiquement le vecteur E
engendrée par le point de coordonnées Ex , Ey après traversée de la lame ?
4. Le faisceau arrive ensuite sur la surface du CD, considéré comme un miroir
plan métallique
de très grande conductivité. Quelle condition doit satisfaire le champ
électrique à la surface de
ce miroir ? Quel est alors le facteur de phase introduit par la réflexion pour
chaque composante,
ainsi que la valeur du rapport ER /EL des composantes de l'onde réfléchie ?
5. Le faisceau réfléchi retraverse la lame LR. En utilisant les résultats des
questions précédentes, déterminer le rapport ER /EL après la nouvelle
traversée. En déduire l'état de polarisation
de ce faisceau. Que devient-il en arrivant sur le cube ?
II.2. Focalisation
On assimile la diode laser à un point émetteur. La lentille L2 , convergente et
de distance
focale image f2 , concentre le faisceau incident en un spot de petite taille
dont le diamètre peut
être évalué par la théorie de la diffraction. La mise en oeuvre du principe de
Huygens-Fresnel dans
le cas d'un diaphragme circulaire de rayon a conduit à une répartition
angulaire de l'intensité
0, 610
sortante I() maximale pour = 0 et s'annulant pour 1 sin 1 =
où 0 = 2/k0 est
a
la longueur d'onde du rayonnement et l'angle formé avec la direction du
faisceau incident ; le
cône correspondant contient 84% du flux énergétique total. On définit souvent
le diamètre utile
de la tache de diffraction comme le diamètre du premier anneau noir de cette
tache ; c'est une
valeur excessive ; la moitié /2 est parfois utilisée mais elle sous-évalue
l'effet.
6. Donner l'expression du diamètre = D du premier anneau noir de la tache de
diffraction
dans le plan focal image de L2 .
11
7. Calculer D pour a = 1, 25 mm, f2 = 2, 5 mm et 0 = 0, 780 µm. Les conditions
de
l'approximation de Gauss sont-elles satisfaites par ce système optique ?
8. Notant n l'indice optique du milieu (n = 1 pour l'air) et u l'angle entre
l'axe optique et le
rayon le plus incliné passant par le point de convergence, on définit
l'ouverture numérique (NA)
par la relation (NA) = n sin u. Une analyse valable pour l'optique non
paraxiale (NP) conduit
. Calculer l'ouverture numérique du système précédent, en
à l'expression = N P = 1, 22
(NA)
déduire N P et comparer cette valeur au D de la question 7.
9. La surface réfléchissante du CD est protégée par un diélectrique transparent
d'indice
n = 1, 55 ; l'épaisseur de la couche est e = 1, 2 mm. En utilisant les
propriétés optiques du
dioptre plan dans l'approximation de Gauss, calculer la distance entre L2 et la
face avant du CD.
10. Montrer que, dans le diélectrique, l'ouverture numérique au point de
convergence est
inchangée. Quelle est la conséquence de ce fait pour le diamètre du spot ?
Est-ce cohérent avec
le grandissement associé au dioptre plan ?
II.3. Détection optique des défauts de focalisation
Le spot doit en permanence se situer sur la surface réfléchissante du CD. Or,
la position de
la surface du disque fluctue. Un asservissement visant à maintenir la distance
disque-lentille à
sa valeur idéale de focalisation est indispensable. Pour cela il est nécessaire
d'obtenir un signal
d'erreur, fonction de l'écart entre le disque et le foyer F2 de L2 .
Les lentilles sphériques L1 et L2 ont une symétrie axiale. La section
transverse d'un faisceau
lumineux focalisé par de telles lentilles est identique de part et d'autre du
plan focal. Il n'est
donc pas possible de distinguer si le CD est en avant ou en arrière du premier
plan focal et donc
de corriger simplement un défaut de focalisation. Pour pallier cette
difficulté, le dispositif le plus
couramment employé utilise les propriétés d'un faisceau dont la surface d'onde
est rendue non
sphérique. Pratiquement, on place une lentille planocylindrique LC entre CS et
PD. La figure
16 représente une telle lentille, qu'on supposera mince. Ce sont les propriétés
de ce dispositif qui
sont étudiées dans cette partie, dans le cadre de l'optique géométrique et dans
l'approximation
de Gauss.
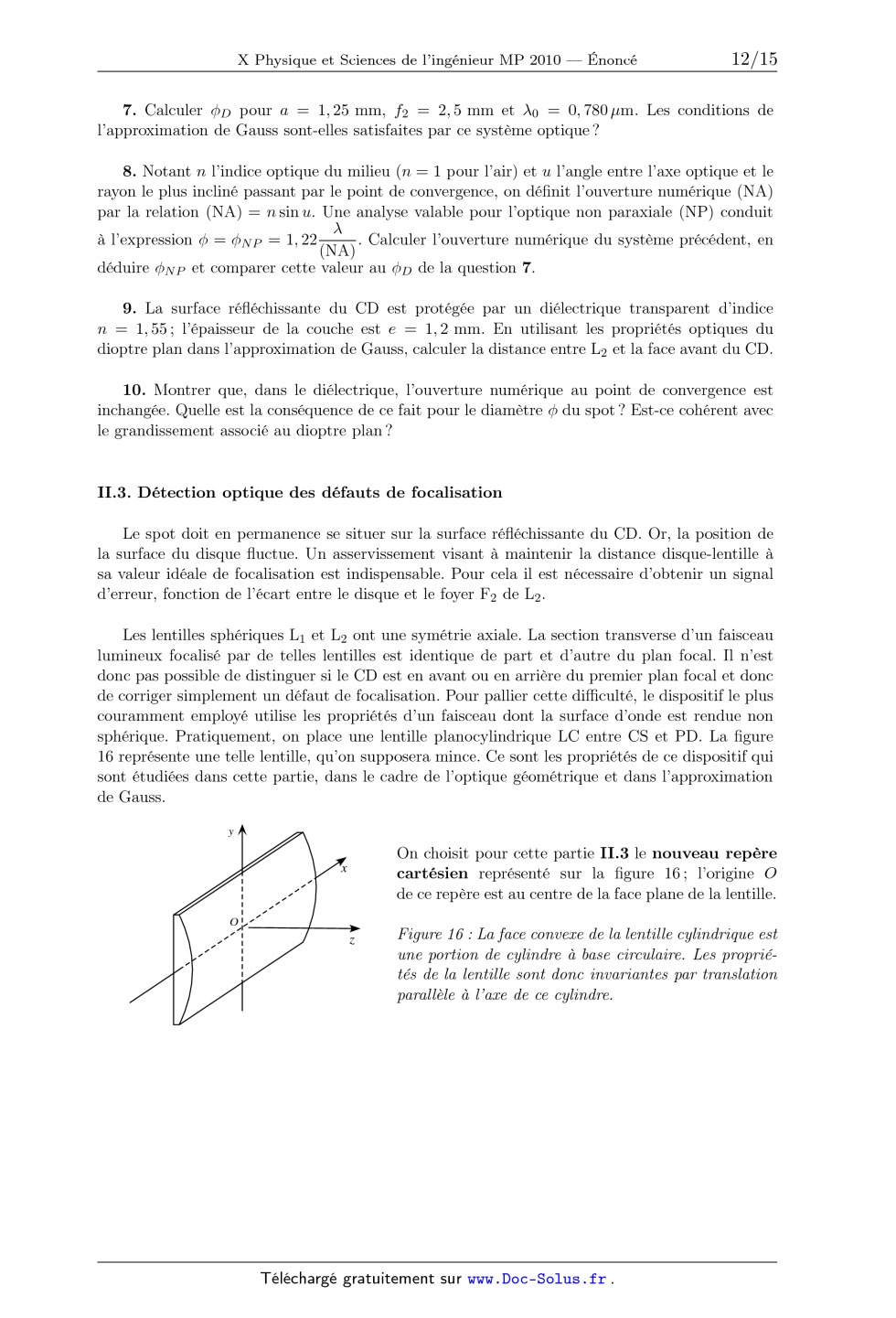
y
On choisit pour cette partie II.3 le nouveau repère
cartésien représenté sur la figure 16 ; l'origine O
de ce repère est au centre de la face plane de la lentille.
x
O
z
Figure 16 : La face convexe de la lentille cylindrique est
une portion de cylindre à base circulaire. Les propriétés de la lentille sont
donc invariantes par translation
parallèle à l'axe de ce cylindre.
12
11. Quel est l'effet de la lentille cylindrique sur un ensemble de rayons
parallèles à
l'axe z et contenus dans le plan xOz ? Quel est l'effet de la lentille
cylindrique sur un ensemble
de rayons parallèles à Oz et contenus dans un plan parallèle au plan yOz ? Les
réponses devront
s'appuyer sur des schémas 2D visualisant les effets décrits.
12. Le montage de lecture comprend en réalité une combinaison de lentilles
conventionnelles
(équivalentes globalement à une lentille convergente unique) et d'une lentille
cylindrique (ensemble dit sphérocylindrique). Quel est l'effet de l'ensemble
sphérocylindrique sur un faisceau de
rayons parallèles à Oz et contenus dans le plan xOz ?
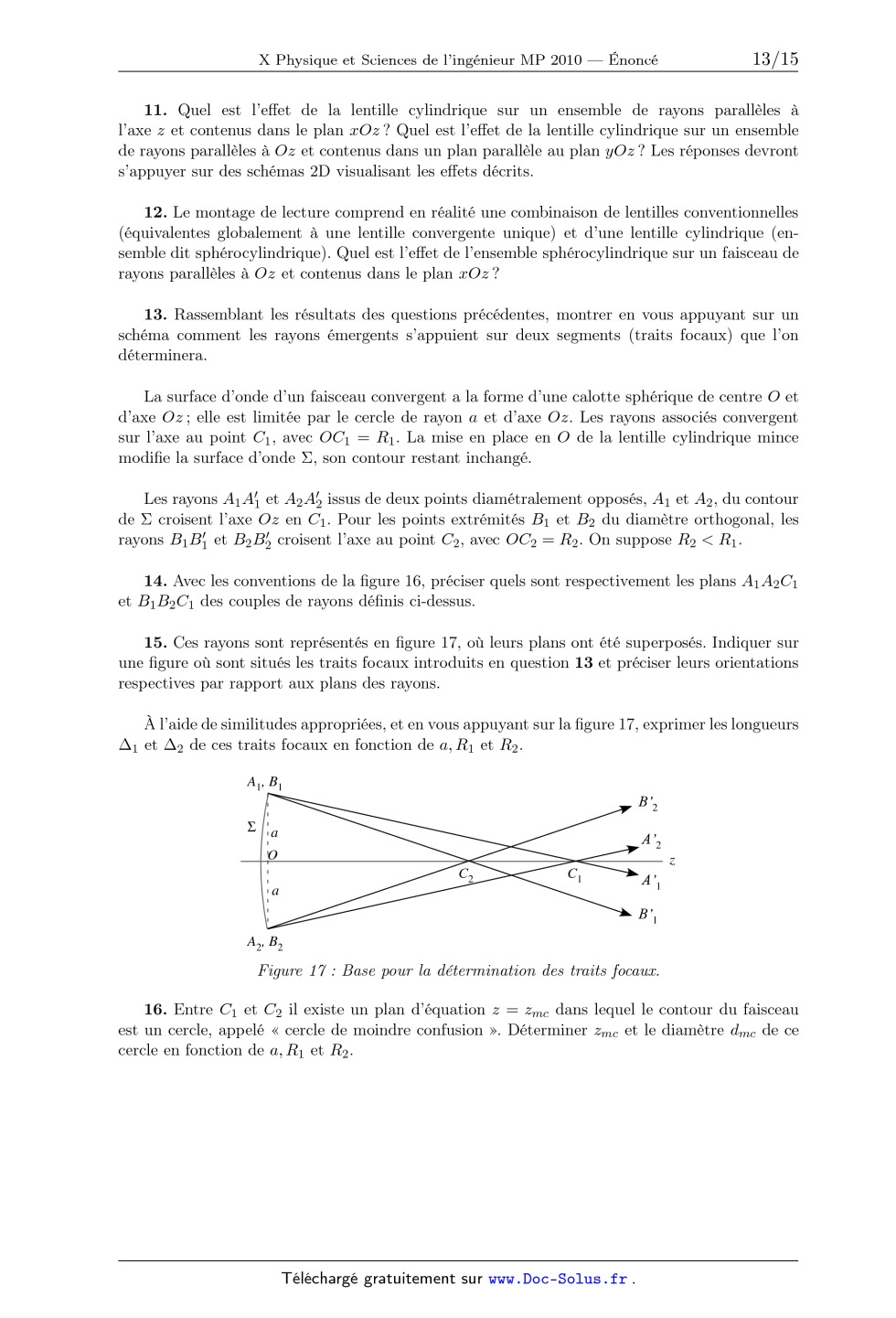
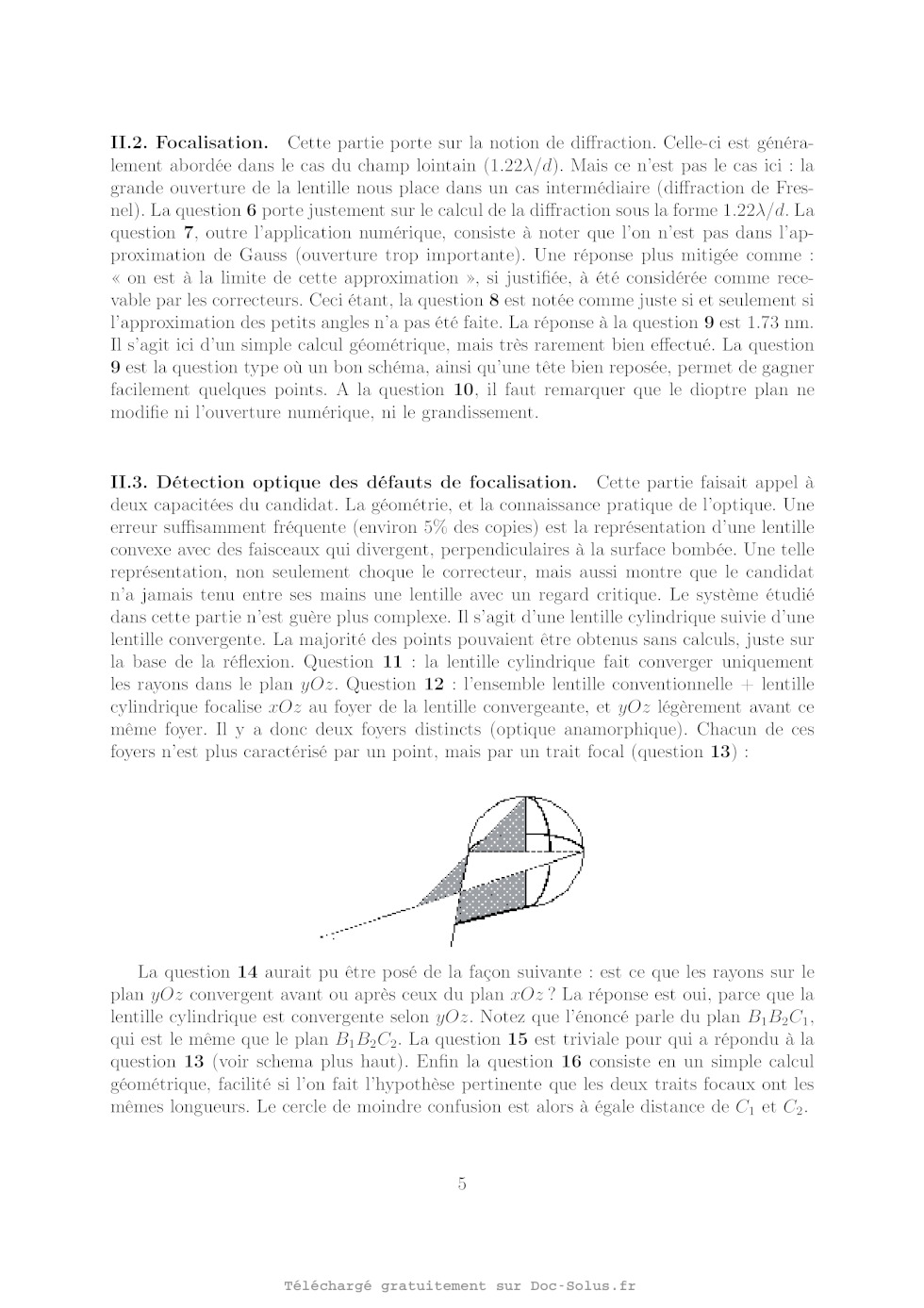
13. Rassemblant les résultats des questions précédentes, montrer en vous
appuyant sur un
schéma comment les rayons émergents s'appuient sur deux segments (traits
focaux) que l'on
déterminera.
La surface d'onde d'un faisceau convergent a la forme d'une calotte sphérique
de centre O et
d'axe Oz ; elle est limitée par le cercle de rayon a et d'axe Oz. Les rayons
associés convergent
sur l'axe au point C1 , avec OC1 = R1 . La mise en place en O de la lentille
cylindrique mince
modifie la surface d'onde , son contour restant inchangé.
Les rayons A1 A1 et A2 A2 issus de deux points diamétralement opposés, A1 et A2
, du contour
de croisent l'axe Oz en C1 . Pour les points extrémités B1 et B2 du diamètre
orthogonal, les
rayons B1 B1 et B2 B2 croisent l'axe au point C2 , avec OC2 = R2 . On suppose
R2 < R1 . 14. Avec les conventions de la figure 16, préciser quels sont respectivement les plans A1 A2 C1 et B1 B2 C1 des couples de rayons définis ci-dessus. 15. Ces rayons sont représentés en figure 17, où leurs plans ont été superposés. Indiquer sur une figure où sont situés les traits focaux introduits en question 13 et préciser leurs orientations respectives par rapport aux plans des rayons. À l'aide de similitudes appropriées, et en vous appuyant sur la figure 17, exprimer les longueurs 1 et 2 de ces traits focaux en fonction de a, R1 et R2 . A1, B1 2 a 2 O a z C2 C1 1 1 A2, B2 Figure 17 : Base pour la détermination des traits focaux. 16. Entre C1 et C2 il existe un plan d'équation z = zmc dans lequel le contour du faisceau est un cercle, appelé « cercle de moindre confusion ». Déterminer zmc et le diamètre dmc de ce cercle en fonction de a, R1 et R2 . 13 II.4. Étude pratique du faisceau réfléchi Figure 18 : Construction de l'image paraxiale d'un objet par une lentille mince. 17. Les notations étant celles de la figure 18, on définit le grandissement transverse G de la lentille (ou grandissement tout court) par G = rapport des petites variations g = d OA A B et le grandissement linéaire axial g par le AB . Établir la relation g = G2 . d OA La figure 19 représente un schéma optique équivalent pour le faisceau réfléchi. On étudie d'abord le système sans la lentille cylindrique. Les lentilles L1 et L2 , de distances focales respectives f1 et f2 , ont un foyer commun F. Figure 19 : Schéma optique équivalent pour le faisceau réfléchi. 18. Exprimer, en fonction de f1 et de f2 , le grandissement G entre un objet placé au foyer F2 et son image sur le photo-détecteur au foyer F1 . 19. La surface réfléchissante du disque se déplace de vers L2 . De quelle valeur se déplace le point source du faisceau réfléchi ? Montrer que son image, initialement en F1 se déplace de = 2G2 . 20. Soient nC l'indice du verre et RC le rayon de courbure de la face cylindrique de la lentille plan-cylindrique LC. On admet que l'effet de cette dernière est de modifier la surface d'onde 1 1 nC - 1 de telle sorte que = + . On convient des valeurs f1 = 17, 5 mm, f2 = 2, 5 mm, R2 R1 RC R1 = 10, 5 mm, R1 - R2 = 0, 4 mm et nC = 1, 50 ; le diamètre du faisceau au niveau de L1 est de 2,5 mm. Calculer RC , les longueurs des traits focaux et le diamètre du cercle de moindre confusion, tels que définis en II.3. 21. La source en F2 n'est plus ici considérée comme ponctuelle, mais comme une tache dont l'extension a été évaluée à la question 8. Quelle influence cela a-t-il sur les dimensions des « taches » calculées ? Pour les éventuelles évaluations numériques, on conviendra que le diamètre de la tache est de 1, 4 µm. 22. Du fait de l'insertion de LC, le foyer F1 n'existe plus. Le photodétecteur PD est alors positionné au cercle de moindre confusion, tel que défini dans la question 16. Décrire ce qui se passe au niveau du PD lorsque le CD se rapproche de L2 en partant de F2 . Même question lorsqu'il s'en éloigne. 23. À quelles valeurs de déplacement du CD correspondent les passages au niveau du PD des deux taches focales ? On admettra que la relation = 2G2 donnée en 19 est valable. 24. Pour assurer le suivi de la piste du CD, deux pinceaux lumineux auxiliaires sont envoyés sur la surface réfléchissante du CD, en avant et en arrière du spot principal, et légèrement décalés latéralement (figure 20). Pour obtenir ces faisceaux, un réseau par transmission est placé devant la diode laser avec son plan orthogonal à l'axe z ; ce réseau est conçu de façon que, à part le faisceau principal (ordre 0), seuls les ordres +1 et -1 soient d'une intensité significative. Il comprend 10 traits par mm. Figure 20 : Lorsque les faisceaux sont bien positionnés, les spots latéraux recouvrent la même surface de piste. Le cas représenté ici montre un décalage r , ce qui produit un signal d'erreur dont le signe (différence des intensités lumineuses en réflexion des spots latéraux) renseigne sur l'orientation du décalage ; ici, vers notre droite. r Calculer les angles des deux faisceaux latéraux par rapport au faisceau central. En déduire la distance de leurs spots avec le spot principal, puis celles de leurs images au niveau du PD. 25. La figure 21 représente le motif coté de la photodiode. Les résultats numériques des questions 20 et 24 sont-ils compatibles avec ces dimensions ? 20 0 Y D C 12 0 X Figure 21 : Motif de la diode détectrice, les dimensions sont en micromètres. X A 30 50 B 50 30 12 0 Y