
X Physique et Sciences de l'ingénieur MP 2009
| Thème de l'épreuve | Propulsion et sustentation magnétiques |
| Principaux outils utilisés | induction, asservissements |
| Mots clefs | lévitation, maglev |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - -

Énoncé complet
(télécharger le PDF)


Rapport du jury
(télécharger le PDF)

Énoncé obtenu par reconnaissance optique des caractères
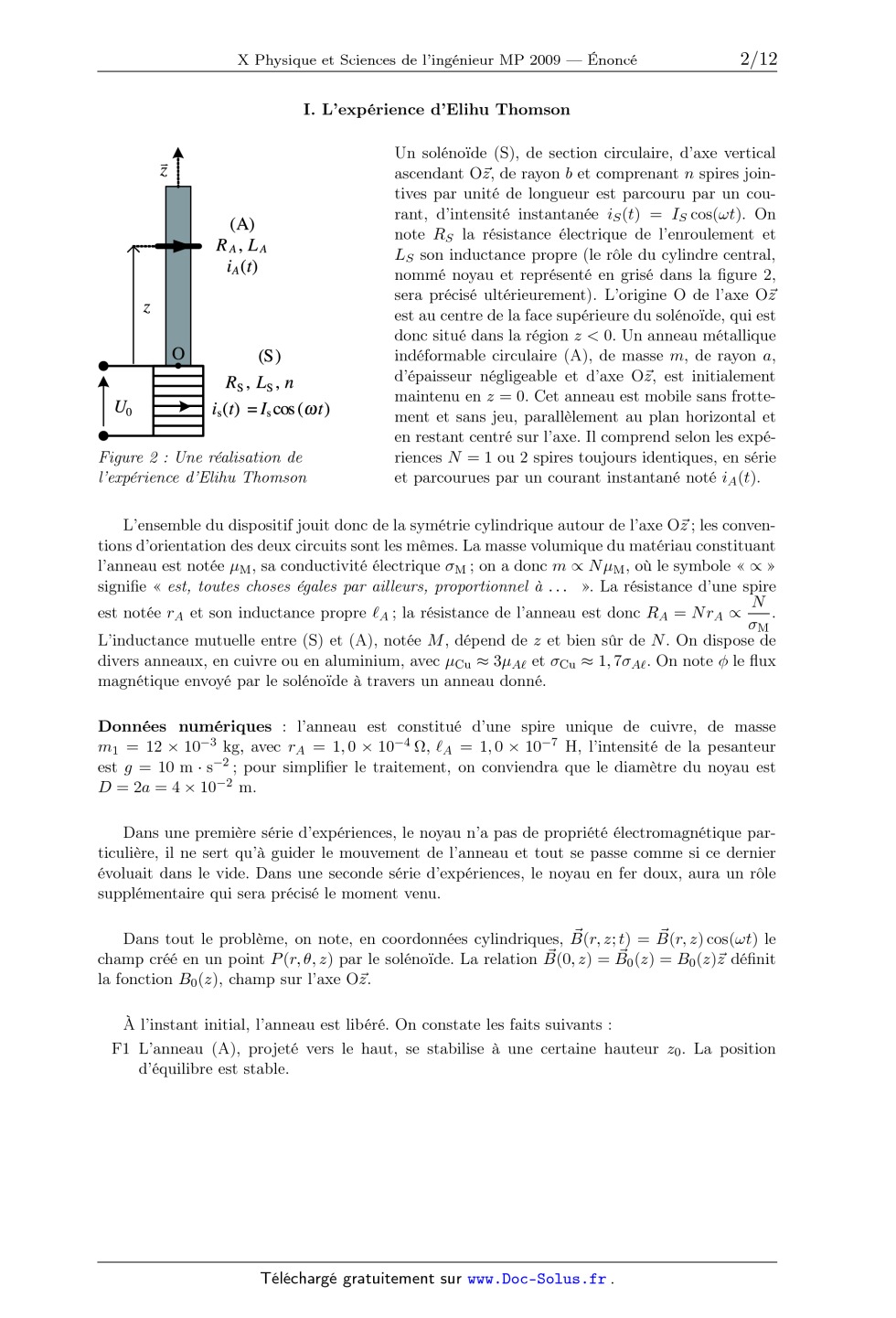
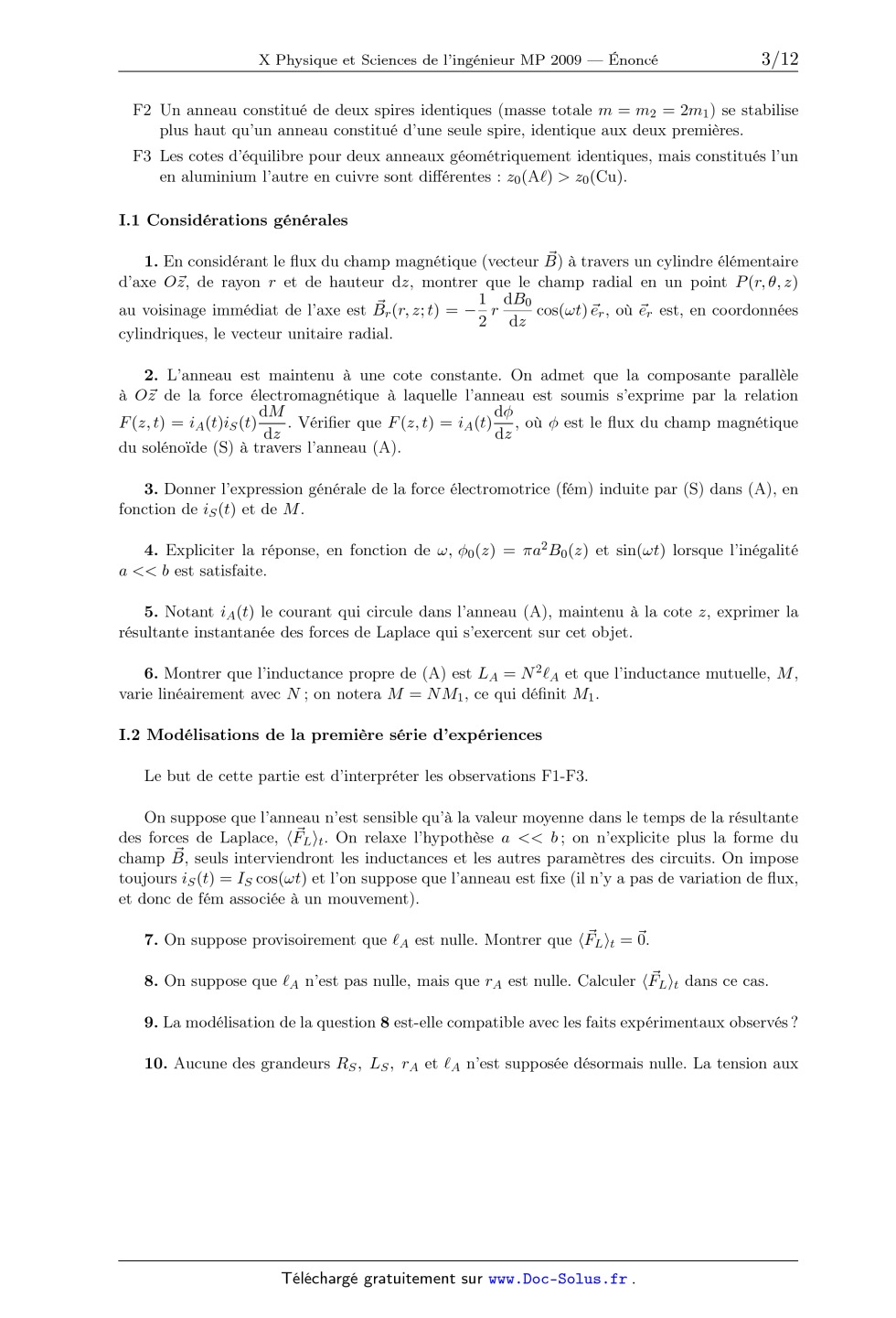
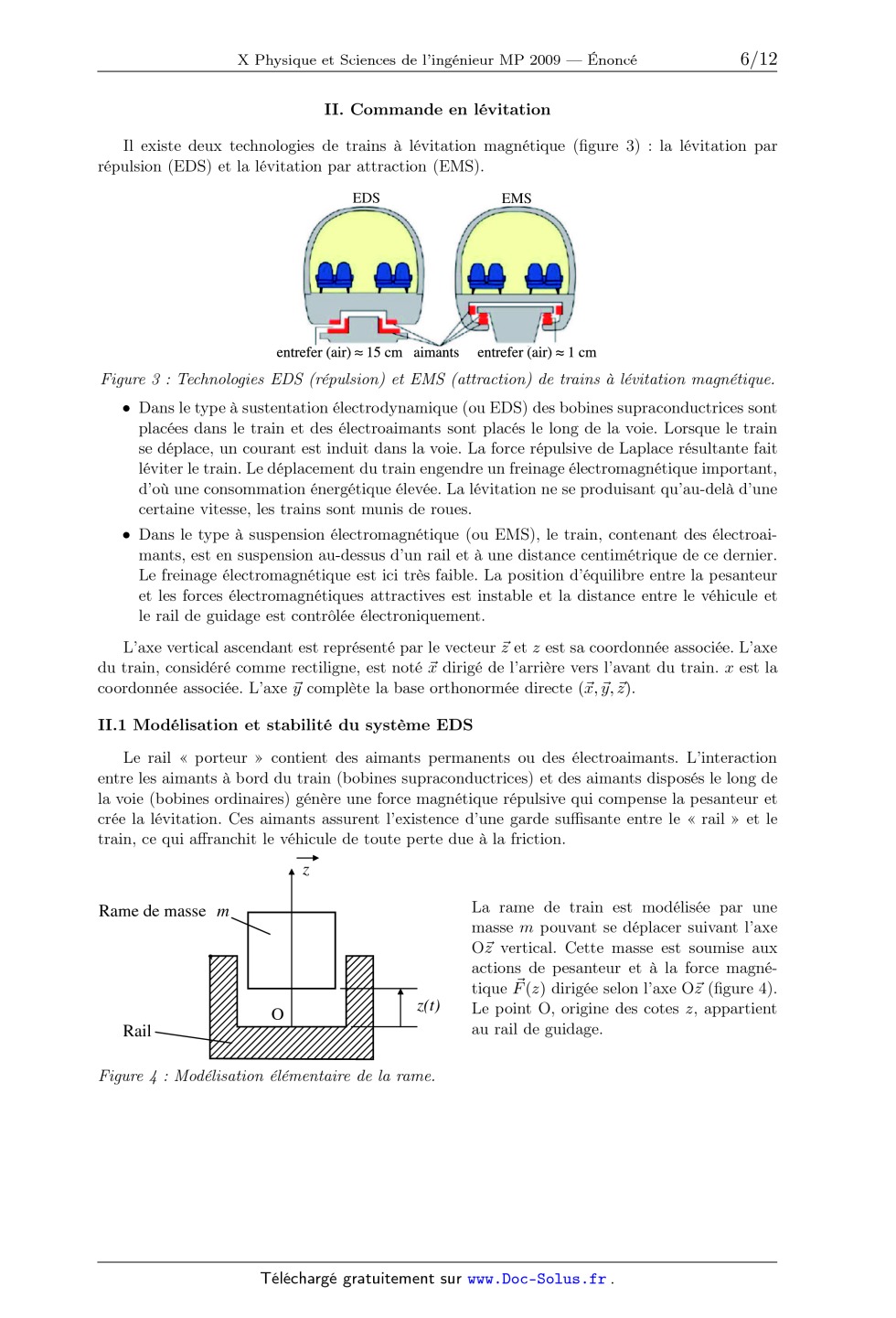
ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l'Ingénieur CONCOURS D'ADMISSION 2009 COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGÉNIEUR (Durée : 4 heures) L'utilisation des calculatrices est autorisée pour cette épreuve. Propulsion et sustentation magnétiques Projets futuristes dans les années 1970, la propulsion et la sustentation magnétiques sont aujourd'hui une réalité (figure 1). Le train à lévitation magnétique, ou Maglev, utilise les forces magnétiques pour assurer sa sustentation, son guidage et sa propulsion. En régime de croisière, il n'y a pas de roues en contact avec des rails, ce qui permet de réduire les frottements et d'atteindre des vitesses élevées. Le record de vitesse actuel, établi en 2003, est de 581 km/h. Figure 1 : Le Transrapid rejoint l'aéroport au coeur de Shanghaï en moins de 8 minutes, à 250 km/h en moyenne, avec une vitesse maximale de 400 km/h. Ce problème aborde successivement une modélisation historique de la sustentation électromagnétique (partie I) et quelques aspects de la commande de la lévitation d'un Maglev (partie II). Dans l'ensemble du problème, l'axe vertical ascendant est représenté par le vecteur unitaire ~z et z est sa coordonnée associée. Les vecteurs horizontaux ~x et ~y complètent la base orthonormée directe (~x, ~y , ~z). 1 I. L'expérience d'Elihu Thomson Figure 2 : Une réalisation de l'expérience d'Elihu Thomson Un solénoïde (S), de section circulaire, d'axe vertical ascendant O~z, de rayon b et comprenant n spires jointives par unité de longueur est parcouru par un courant, d'intensité instantanée iS (t) = IS cos(t). On note RS la résistance électrique de l'enroulement et LS son inductance propre (le rôle du cylindre central, nommé noyau et représenté en grisé dans la figure 2, sera précisé ultérieurement). L'origine O de l'axe O~z est au centre de la face supérieure du solénoïde, qui est donc situé dans la région z < 0. Un anneau métallique indéformable circulaire (A), de masse m, de rayon a, d'épaisseur négligeable et d'axe O~z, est initialement maintenu en z = 0. Cet anneau est mobile sans frottement et sans jeu, parallèlement au plan horizontal et en restant centré sur l'axe. Il comprend selon les expériences N = 1 ou 2 spires toujours identiques, en série et parcourues par un courant instantané noté iA (t). L'ensemble du dispositif jouit donc de la symétrie cylindrique autour de l'axe O~z ; les conventions d'orientation des deux circuits sont les mêmes. La masse volumique du matériau constituant l'anneau est notée µM , sa conductivité électrique M ; on a donc m N µM , où le symbole « » signifie « est, toutes choses égales par ailleurs, proportionnel à . . . ». La résistance d'une spire N . est notée rA et son inductance propre A ; la résistance de l'anneau est donc RA = N rA M L'inductance mutuelle entre (S) et (A), notée M , dépend de z et bien sûr de N . On dispose de divers anneaux, en cuivre ou en aluminium, avec µCu 3µA et Cu 1, 7A . On note le flux magnétique envoyé par le solénoïde à travers un anneau donné. Données numériques : l'anneau est constitué d'une spire unique de cuivre, de masse m1 = 12 × 10-3 kg, avec rA = 1, 0 × 10-4 , A = 1, 0 × 10-7 H, l'intensité de la pesanteur est g = 10 m · s-2 ; pour simplifier le traitement, on conviendra que le diamètre du noyau est D = 2a = 4 × 10-2 m. Dans une première série d'expériences, le noyau n'a pas de propriété électromagnétique particulière, il ne sert qu'à guider le mouvement de l'anneau et tout se passe comme si ce dernier évoluait dans le vide. Dans une seconde série d'expériences, le noyau en fer doux, aura un rôle supplémentaire qui sera précisé le moment venu. ~ z; t) = B(r, ~ z) cos(t) le Dans tout le problème, on note, en coordonnées cylindriques, B(r, ~ z) = B ~ 0 (z) = B0 (z)~z définit champ créé en un point P (r, , z) par le solénoïde. La relation B(0, la fonction B0 (z), champ sur l'axe O~z. À l'instant initial, l'anneau est libéré. On constate les faits suivants : F1 L'anneau (A), projeté vers le haut, se stabilise à une certaine hauteur z0 . La position d'équilibre est stable. 2 F2 Un anneau constitué de deux spires identiques (masse totale m = m2 = 2m1 ) se stabilise plus haut qu'un anneau constitué d'une seule spire, identique aux deux premières. F3 Les cotes d'équilibre pour deux anneaux géométriquement identiques, mais constitués l'un en aluminium l'autre en cuivre sont différentes : z0 (A) > z0 (Cu). I.1 Considérations générales ~ à travers un cylindre élémentaire 1. En considérant le flux du champ magnétique (vecteur B) d'axe O~z, de rayon r et de hauteur dz, montrer que le champ radial en un point P (r, , z) ~ r (r, z; t) = - 1 r dB0 cos(t) ~er , où ~er est, en coordonnées au voisinage immédiat de l'axe est B 2 dz cylindriques, le vecteur unitaire radial. 2. L'anneau est maintenu à une cote constante. On admet que la composante parallèle à O~z de la force électromagnétique à laquelle l'anneau est soumis s'exprime par la relation d dM . Vérifier que F (z, t) = iA (t) , où est le flux du champ magnétique F (z, t) = iA (t)iS (t) dz dz du solénoïde (S) à travers l'anneau (A). 3. Donner l'expression générale de la force électromotrice (fém) induite par (S) dans (A), en fonction de iS (t) et de M . 4. Expliciter la réponse, en fonction de , 0 (z) = a2 B0 (z) et sin(t) lorsque l'inégalité a << b est satisfaite. 5. Notant iA (t) le courant qui circule dans l'anneau (A), maintenu à la cote z, exprimer la résultante instantanée des forces de Laplace qui s'exercent sur cet objet. 6. Montrer que l'inductance propre de (A) est LA = N 2 A et que l'inductance mutuelle, M , varie linéairement avec N ; on notera M = N M1 , ce qui définit M1 . I.2 Modélisations de la première série d'expériences Le but de cette partie est d'interpréter les observations F1-F3. On suppose que l'anneau n'est sensible qu'à la valeur moyenne dans le temps de la résultante des forces de Laplace, hF~L it . On relaxe l'hypothèse a << b ; on n'explicite plus la forme du ~ seuls interviendront les inductances et les autres paramètres des circuits. On impose champ B, toujours iS (t) = IS cos(t) et l'on suppose que l'anneau est fixe (il n'y a pas de variation de flux, et donc de fém associée à un mouvement). 7. On suppose provisoirement que A est nulle. Montrer que hF~L it = ~0. 8. On suppose que A n'est pas nulle, mais que rA est nulle. Calculer hF~L it dans ce cas. 9. La modélisation de la question 8 est-elle compatible avec les faits expérimentaux observés ? 10. Aucune des grandeurs RS , LS , rA et A n'est supposée désormais nulle. La tension aux 3 bornes du solénoïde est notée uS (t) = U0 cos(t). Exprimer la loi des mailles pour le solénoïde et pour l'anneau. 11. On note en représentation complexe IA et IS les amplitudes complexes des intensités iA (t) et iS (t), ZA = RA + jLA = |ZA | exp(jA ), ZS = RS + jLS = |ZS | exp(jS ), ZAS = jM et D 2 = ZA ZS + M 2 2 = |D|2 exp(2jD ). Exprimer IA et IS en fonction de ZA , D, U0 et ZAS . En déduire les expressions de iS (t) et de iA (t). 12. Établir la relation suivante pour la force moyenne subie par un anneau constitué de N spires : N2 . hF it h i2 2 2 2 2 rA RS + N (M1 - A LS ) + (rA LS + N A RS ) F (2) , rapport des forces magnétiques agissant resF (1) pectivement sur un anneau constitué de deux spires et sur un anneau d'une spire pour RS = 2 , A = 1, 0 × 10-7 H, LS = 0, 1 H, M1 = 5, 0 × 10-5 H et = 100 rad · s-1 (50 Hz). 13. Application numérique : Calculer 14. Interpréter F2. 15. Interpréter F3. I.3 Modélisations de la deuxième série d'expériences Cette série concerne une spire unique (rA , A , M1 ). On garde le même dispositif expérimental, à ceci près que le matériau du noyau, de hauteur H = 0, 5 m, est ferromagnétique, et provisoirement supposé isolant. En plus de son rôle de guidage de l'anneau, le noyau canalise et augmente sensiblement le champ produit par la bobine. Dans ces conditions, l'inductance A de l'anneau est influencée par le noyau et devient A qui dépend de l'altitude. Pour simplifier les calculs, on remplacera A par sa valeur moyenne spatiale . Numériquement, la spire est choisie de telle manière que = 1, 0 × 10-7 H. On garde l'hypothèse que l'anneau n'est sensible qu'à la valeur moyenne dans le temps de la résultante des forces de Laplace, hF~L it . Le champ magnétique dans le noyau diminue au fur et à mesure que l'on s'éloigne de la bobine pour s'annuler au-delà de z = H. Le flux du champ dans le noyau est alors modélisé par la relation z (z) cos(t) = 0 1 - cos(t), avec = 0, 6 pour 0 6 z 6 H H (z, t) = 0 pour z > H . Pour 0 6 z 6 H, on établit que la force électromotrice induite dans l'anneau positionné à la cote z est e(z, t) = -d/dt = (z) sin(t), que le courant induit en régime permanent est iA (t) = (z) rA Ä 2 + rA ä2 sin(t) - Ä 2 + rA ä2 cos(t) et que l'expression du champ radial à la surface du noyau est Br = 4 0 cos(t). DH 16. Établir l'expression suivante de la composante Fz selon O~z de la résultante des forces de Laplace s'exerçant sur l'anneau : Fz = - 0 H (z) rA Ä 2 + rA ä2 sin(t) cos(t) - Ä 2 + rA 2 ä2 cos (t) . 17. Montrer que la moyenne temporelle hFz it se met sous la forme hFz it = F0 1 - préciser F0 . Donner l'équation du mouvement de (A), sous l'action de hFz it . z et H 18. Quelle inégalité doit être satisfaite entre F0 , m et g pour que l'anneau, positionné initialement en z = 0, décolle ? Cette condition étant satisfaite, à quelle cote z0 l'anneau se stabiliserat-il ? 19. Application numérique : Calculer z0 pour = 100 rad · s-1 et 0 = 5 × 10-4 Wb. 20. Donner la solution de l'équation du mouvement obtenue en 15, avec les conditions initiales z(0) = 0 et z(0) = 0. 21. L'inégalité établie à la question 18 étant satisfaite, quel est l'effet, négligé dans la modélisation, qui provoque l'amortissement du mouvement et permet d'atteindre la position d'équilibre ? 22. À partir de maintenant, l'anneau, avant d'être positionné, est refroidi de telle sorte que sa résistance soit abaissée d'un facteur 10 (on le trempe dans de l'azote liquide, dont la température d'ébullition est de 77 K). Calculer numériquement z0 . Est-ce une position d'équilibre ? 23. Dans les conditions expérimentales de la question 22, l'inégalité de la question 18 étant satisfaite et les conditions initiales étant celles de la question 20, calculer numériquement la vitesse de l'anneau lorsqu'il arrive à l'extrémité du noyau et la durée pour y parvenir. 24. Dans quelle mesure l'utilisation d'une force moyennée temporellement est-elle dans ce cas justifiée ? 25. On suppose que, une fois séparé du noyau, l'anneau n'est soumis qu'à la pesanteur. Quelle est l'altitude maximale qu'il atteint ? 26. Dans la réalité, le noyau conducteur, est le siège de courants ; pour avoir une idée grossière ~ uniforme dans le matériau : B(r, ~ z; t) = B0 cos(t)~z et admettons des pertes Joule, supposons B ~ z; t) = 1 B0 r sin(t) ~e (~e est le sous cette hypothèse que le champ électrique associé soit E(r, 2 vecteur unitaire pour la coordonnée ). Expliquer alors pourquoi il est avantageux de remplacer a le cylindre de rayon a par p cylindres identiques de rayon avec p aussi élevé que possible, et p séparés par de l'isolant (les cylindres, d'axes parallèles à O~z, sont disposés de manière compacte à l'intérieur du cylindre de rayon a ; cette substitution conserve approximativement le volume de ~ qui reste uniforme au sein du noyau). matière et ne modifie pas le champ B, 5 II. Commande en lévitation Il existe deux technologies de trains à lévitation magnétique (figure 3) : la lévitation par répulsion (EDS) et la lévitation par attraction (EMS). EDS EMS Figure 3 : Technologies EDS (répulsion) et EMS (attraction) de trains à lévitation magnétique. · Dans le type à sustentation électrodynamique (ou EDS) des bobines supraconductrices sont placées dans le train et des électroaimants sont placés le long de la voie. Lorsque le train se déplace, un courant est induit dans la voie. La force répulsive de Laplace résultante fait léviter le train. Le déplacement du train engendre un freinage électromagnétique important, d'où une consommation énergétique élevée. La lévitation ne se produisant qu'au-delà d'une certaine vitesse, les trains sont munis de roues. · Dans le type à suspension électromagnétique (ou EMS), le train, contenant des électroaimants, est en suspension au-dessus d'un rail et à une distance centimétrique de ce dernier. Le freinage électromagnétique est ici très faible. La position d'équilibre entre la pesanteur et les forces électromagnétiques attractives est instable et la distance entre le véhicule et le rail de guidage est contrôlée électroniquement. L'axe vertical ascendant est représenté par le vecteur ~z et z est sa coordonnée associée. L'axe du train, considéré comme rectiligne, est noté ~x dirigé de l'arrière vers l'avant du train. x est la coordonnée associée. L'axe ~y complète la base orthonormée directe (~x, ~y , ~z). II.1 Modélisation et stabilité du système EDS Le rail « porteur » contient des aimants permanents ou des électroaimants. L'interaction entre les aimants à bord du train (bobines supraconductrices) et des aimants disposés le long de la voie (bobines ordinaires) génère une force magnétique répulsive qui compense la pesanteur et crée la lévitation. Ces aimants assurent l'existence d'une garde suffisante entre le « rail » et le train, ce qui affranchit le véhicule de toute perte due à la friction. z Rame de masse m O z(t) Rail Figure 4 : Modélisation élémentaire de la rame. 6 La rame de train est modélisée par une masse m pouvant se déplacer suivant l'axe O~z vertical. Cette masse est soumise aux actions de pesanteur et à la force magnétique F~ (z) dirigée selon l'axe O~z (figure 4). Le point O, origine des cotes z, appartient au rail de guidage. Propriétés de la lévitation électrodynamique L'inductance mutuelle entre les bobines de la voie de guidage et les bobines à bord du train az est modélisée par la relation : M (z) = M1 exp - , où a > 0. La grandeur « 1/a » est une 2 estimation de la portée des effets magnétiques. L'inductance des bobines de la voie de guidage est notée A et celle des bobines à bord du train L0 . Un courant I circule dans ces dernières. Dans ces conditions, on montre que l'interaction électromagnétique génère une force magnétique 1 induite : F (z) = F0 exp(-az), avec F0 = aL1 I 2 . 2 27. Valeurs numériques : m = 1, 0 × 104 kg, g = 10 m · s-2 , L1 I 2 = 105 kJ. Tracer l'allure de F (z) et calculer la valeur de F (0). 1/a = 0, 1 m et 28. À partir du théorème de la résultante dynamique appliqué Å à la ã masse m (figure 4), vérifier 1 F0 que la cote d'équilibre du véhicule, si elle existe, est z0 = ln . Calculer z0 . a mg 29. Dans la suite, on travaillera sur un modèle de comportement du système. Pour cela on s'intéresse aux petites variations autour de la position d'équilibre z0 et l'on pose : z = z - z0 avec z 1/a. Établir l'équation différentielle linéaire satisfaite par z. Montrer l'équivalence entre le système étudié et un oscillateur non amorti, dont on précisera la pulsation propre 0 et la fréquence propre f0 . Calculer numériquement 0 et f0 . 30. On souhaite identifier le modèle de comportement. Pour ce faire, lors d'un essai de vitesse, on relève une fréquence f0 de 1,65 Hz. En déduire la valeur numérique réelle de la distance caractéristique 1/a. Corriger les évaluations précédentes de F0 et de z0 . C'est cette valeur de 1/a qui sera utilisée dans la suite. 31. Quelles forces supplémentaires, négligées jusqu'ici, pourrait-on prendre en considération dans la modélisation du système afin d'améliorer la stabilité du mouvement ? Contrôle de la lévitation électrodynamique Pour réduire les oscillations décrites par le modèle de comportement précédent, il est nécessaire de mettre au point une loi de commande. L'étude de sa mise au point constitue l'objectif de cette section. Les forces supplémentaires évoquées à la question 31 constituent des perturbations que l'on rend nulles dans l'étude qui suit. On complète le modèle de comportement avec une force de commande mfc~z d'origine magnétique qui s'exerce sur le train. La force massique fc (t) est homogène à une accélération et sa transformée de Laplace est notée Fc (p). 32. Montrer que, dans le domaine de Laplace, la fonction du transfert liant la variation de la position verticale et la force de commande est HEDS (p) = 1 Z(p) = 2 . Fc (p) p + ag 33. Tracer le diagramme asymptotique de Bode en précisant la pulsation caractéristique. 7 Préciser l'influence du paramètre « a » sur le gain statique et la pulsation caractéristique. La stabilisation de la lévitation se fait en réalisant un asservissement de la position via la commande fc suivant le schéma fonctionnel de la figure 5. La fonction de transfert du correcteur p2 + ag est de la forme : C(p) = K 2 , où K, b et c sont des paramètres à déterminer au regard p + bp + c du cahier des charges : bonne précision et amortissement des oscillations. Figure 5 : Système d'asservissement de la position verticale d'une rame de train EDS. BO 34. Calculer la fonction de transfert en boucle ouverte : HEDS (p) = Z(p) . (p) Z(p) . Mettre cette Zref (p) fonction sous forme canonique et préciser les paramètres caractéristiques. Justifier le choix d'une telle structure pour le correcteur. BF 35. Calculer la fonction de transfert en boucle fermée HEDS (p) = 36. On souhaite que l'erreur statique pour une entrée en échelon unitaire soit nulle ; le gain BF statique est alors unitaire. À partir de l'expression de HEDS (p), donner la valeur du paramètre c du correcteur C(p) permettant de satisfaire cette spécification. 37. Préciser l'inconvénient de la structure choisie pour le correcteur si la valeur de « a » est mal connue. Comment choisir « a » pour se prémunir d'un tel inconvénient ? 38. L'erreur statique pour un échelon en entrée est toujours nulle. On souhaite que le temps de réponse du système soit de l'ordre de 1 seconde et qu'il possède les marges de stabilité suivantes : 6 dB pour la marge de gain et 45 pour la marge de phase. En s'appuyant sur les propriétés des diagrammes de Bode, calculer les gains K et b du correcteur pour satisfaire le cahier des charges. Limitation de la lévitation électrodynamique Dans l'étude qui précède, la force électromagnétique de lévitation est indépendante de la vitesse du train. Une modélisation plus fine, prenant en compte la variation de l'induction des exp(-az) , où F0 est bobines avec la vitesse v du train par rapport au sol, donne F (z, v) = F0 1 + (v0 /v)2 la grandeur donnée à la question 27 et v0 une vitesse de référence, évaluée ici à 12 m · s-1 , soit environ 43 km/h. 39. À partir du théorème de la résultante appliqué au train en projection sur l'axe ~z, exprimer la position d'équilibre z0 (v). 8 40. Quelle est la vitesse minimale vmin du train pour que la lévitation soit possible ? Commenter l'inconvénient d'une telle limitation. Quelle solution est adoptée pour permettre néanmoins l'utilisation du système EDS ? II.2 Train à suspension électromagnétique (EMS) La technologie EMS utilise des forces électromagnétiques attractives pour assurer la lévitation du train, comme schématisé par la figure 6. Cette partie concerne la modélisation du système d'asservissement et la réalisation de la loi de commande. Figure 6 : Rame de train à lévitation EMS. Remarque : z < 0. Le système de suspension (figure 6a) est constitué d'un électro-aimant solidaire de la rame du train. La culasse de l'électro-aimant (en forme de U ) est entourée d'une bobine de N spires. L'enroulement est parcouru par un courant variable, noté i, ce qui génère une force électromagnétique dans l'entrefer. Un circuit électrique réalise l'asservissement de la position relative train/rail (entrefer) à une valeur constante, en régulant le courant qui parcourt la bobine. Propriétés de la force de suspension électromagnétique La rame de train est toujours assimilée à une masse m pouvant se déplacer suivant l'axe O~z. On note S/2 la surface utile de chaque électro-aimant (un par rail), µ0 la splitéabilité magnétique du milieu constituant l'entrefer, z la valeur de l'entrefer (remarque : l'origine étant liée au « rail » et le train étant « suspendu » les valeurs de z sont négatives), i le courant dans l'électro-aimant, N le nombre de spires et g l'accélération de la pesanteur. La norme de l'induction magnétique µ0 N i dans l'entrefer est B (z) = et on admet que la force électromagnétique qui s'applique sur 2|z| Å ã µ0 N S i 2 le train, est donnée par la relation F (z) = . 4 z 41. Établir l'équation différentielle relative à la cote z. 42. On considère la position d'équilibre de la rame, caractérisée par un entrefer |z0 | et un courant d'équilibre d'intensité i0 . Montrer que ce courant est proportionnel à la valeur d'entrefer d'équilibre |z0 |. On exprimera la constante de proportionnalité en fonction de S, µ0 et N . En déduire l'expression de l'induction magnétique Beq nécessaire à la suspension du train. Pour l'application numérique, on prendra : m = 1, 0 × 104 kg, S = 0, 5 m2 , N = 400 et µ0 = 4 × 10-7 H · m-1 . 9 Stabilité de la suspension électromagnétique On recherche un modèle de comportement du système. Pour cela on s'intéresse aux petites variations autour de la position d'équilibre et on pose z = -|z0 | + z, i = i0 + i avec |z| |z0 | et |i| i0 . L'asservissement de l'entrefer est réalisé selon le principe du schéma fonctionnel de la figure 7, où l'on indique les notations adoptées pour modéliser chaque composant de la chaîne d'asservissement. Figure 7 : (a) Schéma fonctionnel de l'asservissement de l'entrefer (b) notations pour les blocs du schéma fonctionnel à force perturbatrice nulle. ~ 43. Donner la fonction de transfert H(p) = Z(p)/I(p). Étudier la stabilité de cette fonction et justifier la nécessité d'une boucle d'asservissement. 44. Représenter les diagrammes asymptotiques de Bode, en module et en phase, de la fonction de transfert H(p), en précisant la pulsation caractéristique. 45. Le capteur de position délivre une tension proportionnelle à la position. Son gain est de 20 V/mm. Donner la valeur de la fonction de transfert M (p). Transformer le schéma de la figure 7(b) en un schéma fonctionnel avec retour unitaire. i(t) 46. La conversion tension/courant en sortie du correcteur est réalisée par le circuit RL série de la figure 8. ~ I(p) puis celle Établir l'expression de G(p) = U (p) de la fonction de transfert en boucle ouverte : HBO (p) = Vz (p)/(p) sans prendre en compte le correcteur (C = 1). u(t) Le Re Figure 8 : Schéma électrique de l'actionneur. 10 On donne Re = 1 k et Le = 1 mH ; compte tenu de la faible valeur de Le /Re devant les temps caractéristiques du système, simplifier HBO (p) sous la forme d'une fonction de transfert du second ordre et calculer numériquement ses différents coefficients, pour i0 = 44 A et z0 = 20 mm. Synthèse de la loi de commande Le cahier des charges pour la suspension précise les points suivants : Stabilité : marge de gain 6 dB, marge de phase 45 , Précision : erreur statique nulle pour une entrée en échelon, Rapidité : temps de réponse de l'ordre de 1 ms. 47. On considère le correcteur proportionnel intégral C(p) = KP I diagramme de Bode de ce correcteur et présenter son intérêt. 1 + Ti p . Tracer l'allure du Ti p 48. Calculer la fonction de transfert de la boucle fermée pour le système corrigé. À partir du critère de Routh, conclure quant à la stabilité du système ainsi corrigé. 49. On considère la nouvelle chaîne d'asservissement représentée à la figure 9. Calculer la fonction de transfert en boucle fermée : HBF (p) = Z(p)/Zref (p). Calculer son gain statique et conclure quant au respect de la spécification sur la précision. 50. Montrer que le cahier des charges entraîne que la fonction de transfert entre la sortie et la Z(p) 02 . Préciser les valeurs numériques H BF (p) = 2 consigne est de la forme p + 20 p + 02 Zref (p) de et de 0 . 51. En comparant les fonctions de transfert des deux questions précédentes, montrer que la forme souhaitée de la fonction de transfert en boucle fermée est obtenue par la mise en série avec H BF (p) d'une fonction de transfert supplémentaire dont on précisera l'ordre. Comment choisir les coefficients de cette fonction complémentaire, notée Hc (p), pour satisfaire le cahier des charges ? ~ Z ref (p) + ~ I(p) + K3 /p _ ~ Z(p) HBO (p) _ K1 +K2 p Figure 9 : Nouveau schéma de commande. 52. Comparant les coefficients des dénominateurs de HBF (p) = Hc (p)·H BF (p) et de HBF (p), déterminer les coefficients K1 , K2 , et K3 , indiqués figure 9, pour que le cahier des charges soit respecté. 11 53. Finalement, comparer les deux technologies EMD et EDS et donner les avantages et inconvénients de chacune au regard des résultats des parties II.1 et II.2. Figure 10 : Train à technologie EDS (Japon). Figure 11 : Train à technologie EMS (Chine). 12