
X Physique et Sciences de l'ingénieur MP 2005
| Thème de l'épreuve | Mise en évidence des ondes gravitationnelles par interférométrie optique |
| Principaux outils utilisés | optique ondulatoire, mécanique, asservissements |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - -
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ECOLE POLYTECHNIQUE FILIÈRE MP
Option Physique et Sciences de l'Ingénieur
CONCOURS D'ADMISSION 2005
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGENIEUR
(Durée : 4 heures)
L'utilisation des calculatrices est autorisée pour cette épreuve.
***
L'expérience Virgo
Réduction de certaines causes de bruit de fond
Introduction
La théorie de la relativité générale prédit l'existence d'ondes
gravitationnelles générées par
des masses accélérées. Ces ondes se propagent a la vitesse de la lumière 0.
L'expérience franco--italienne << Virgo >> tente de les mettre en évidence par
les variations
de chemin optique qu'elles engendrent : un gigantesque interféromètre, avec des
bras de 3 km
de long, doit pouvoir mesurer des variations de longueur relatives de l'ordre
de 10--21, a des
fréquences typiques d'ondes gravitationnelles, qui sont de l'ordre de 1 kHz.
L'expérience vise a
être sensible dans toute la gamme de fréquences comprises entre 10 Hz et 10 kHz.
Une telle précision de mesure n'est pas facile à atteindre. On étudie dans ce
problème quelques
phénomènes parasites qui peuvent gêner la mesure et les méthodes utilisées pour
réduire leur
influence.
Données numériques et formulaire :
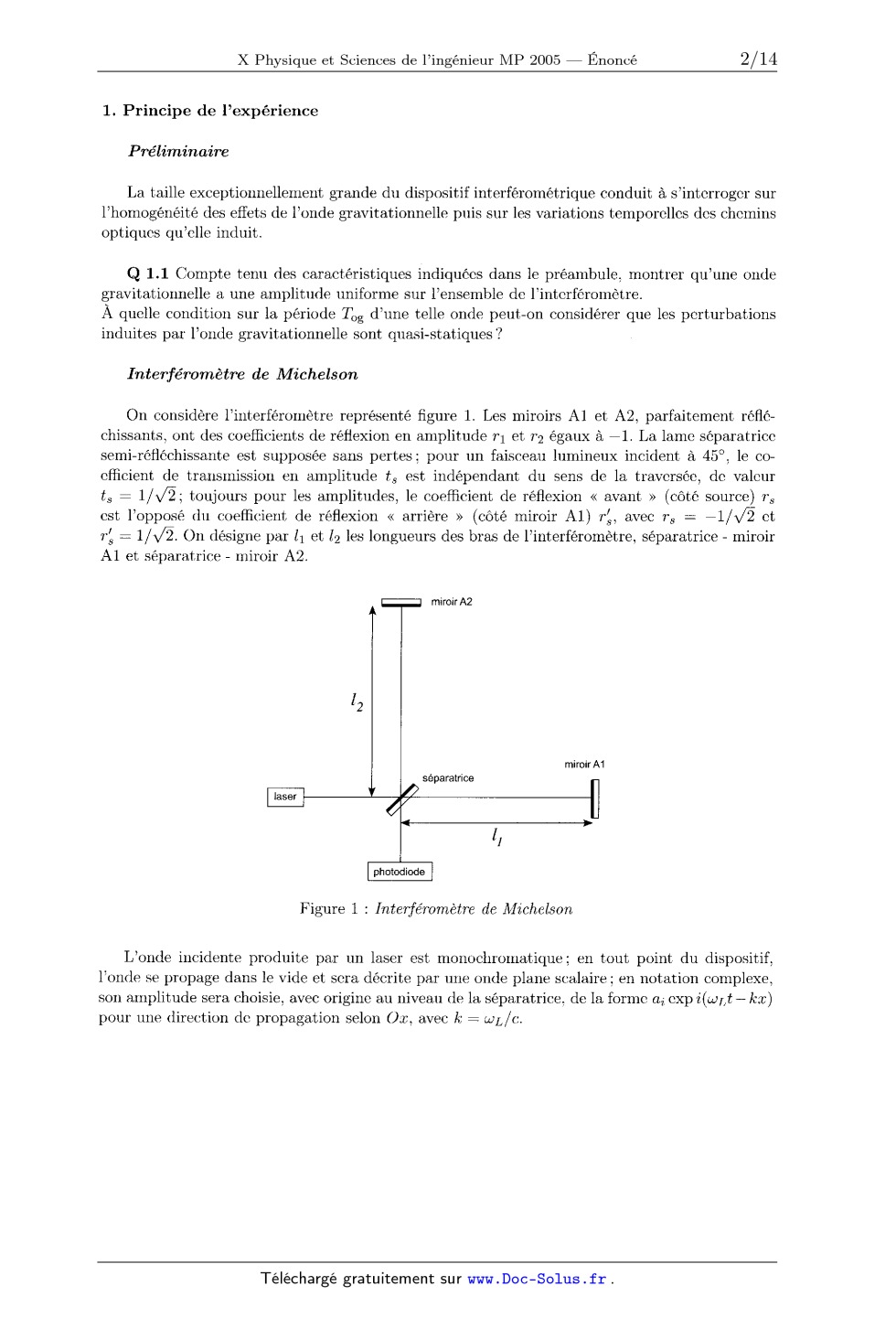
Constante de Planck h = 6, 62 >< 10_34 J - s Constante de Boltzmann kB : 1, 38 >< 10"23 J -K_1 Vitesse de la lumière (: = 3,00 >< 108 m - 5"1 Champ de gravitation g = 9, 81 m -- 5--2 Tous les coefficients de réflexion et de transmission concernent les amplitudes de l'onde lumi-- neuse. 1. Principe de l'expérience Préliminaire La taille exceptionnellement grande du dispositif interférométrique conduit à s'interroger sur l'homogénéité des effets de l'onde gravitationnelle puis sur les variations temporelles des chemins optiques qu'elle induit. Q 1.1 Compte tenu des caractéristiques indiquées dans le préambule, montrer qu'une onde gravitationnelle a une amplitude uniforme sur l'ensemble de l'interféromëtre. À quelle condition sur la période TOg d'une telle onde peut--on considérer que les perturbations induites par l'onde gravitationnelle sont quasi--statiques ? Interféromètre de Michelson On considère l'interféromètre représenté figure 1. Les miroirs A1 et A2, parfaitement réflé-- chissants, ont des coefficients de réflexion en amplitude T1 et T2 égaux à --1. La lame séparatrice semi--réfléchissante est supposée sans pertes; pour un faisceau lumineux incident a 45°, le co-- efficient de transmission en amplitude ts est indépendant du sens de la traversée, de valeur ts : l/\/Î ; toujours pour les amplitudes, le coefficient de réflexion << avant >> (côté source) 71,
est l'opposé du coefficient de réflexion << arrière >> (côté miroir Al) ré,
avec rs : --1/\/Î et
r_'s : 1 / x/Î On désigne par 11 et l2 les longueurs des bras de
l'interféromëtre, séparatrice -- miroir
A1 et séparatrice - miroir A2.
_ miroir A2
miroir A1
photodiode
Figure 1 : Interfémmètre de Michelson
L'onde incidente produite par un laser est monochromatique; en tout point du
dispositif,
l'onde se propage dans le vide et sera décrite par une onde plane scalaire; en
notation complexe,
son amplitude sera choisie, avec origine au niveau de la séparatrice, de la
forme a,,-- exp i(wyf -- kw)
pour une direction de propagation selon Oæ, avec [{ : wL/c.
Q 1.2 Déterminer l'amplitude aout de l'onde sortant vers la photodiode en
fonction de celle
de l'onde incidente a..., de k, 11 et lg.
Q 1.3 Exprimer la puissance R... du faisceau sortant en fonction de la
puissance d'entrée
Pin. Montrer que cette expression se met sous la forme :
Pout = En 81112 k'(l1 -- l2) .
L'onde gravitationnelle, détectable par l'interféromètre, provoque un léger
changement des Ion--
1 1
gueurs des bras ; les longueurs deviennent l1 + ähog l1 et lg -- --2--hog lg où
hog caractérise l'amplitude
de l'onde gravitationnelle. Comme ordre de grandeur, on prendra hog = 10"21
pour une fréquence
de 1 kHz. Le dispositif expérimental doit donc être sensible aux variations de
longueur relatives
correspondantes.
Q 1.4 Montrer que, lors du passage d'une onde gravitationnelle, la puissance de
Sortie varie
de ôPgrav donné par :
1
5Pgrav : äPink hog(l1 + lg) sin 2k(l1 -- lg) .
Q 1.5 On pose @@ : 2k(l1 -- lg). Déterminer les valeurs de (10 pour lesquelles
le signal |ôPgrav|
est maximal.
Q 1.6 Calculer numériquement la valeur maximale de |5Pgravl pour une expérience
de la--
boratoire utilisant un interféromètre avec des bras de 1 m de longueur, le
laser fournissant une
puissance de 20 watts a la longueur d'onde 1, 06 pm. Commenter le résultat
obtenu.
Bruit statistique de photons
Le faisceau de sortie est constitué de photons chacun d'énergie h1/ où V est la
fréquence de
l'onde laser et h la constante de Planck. Sa détection s'effectue à l'aide
d'une photodiode qui
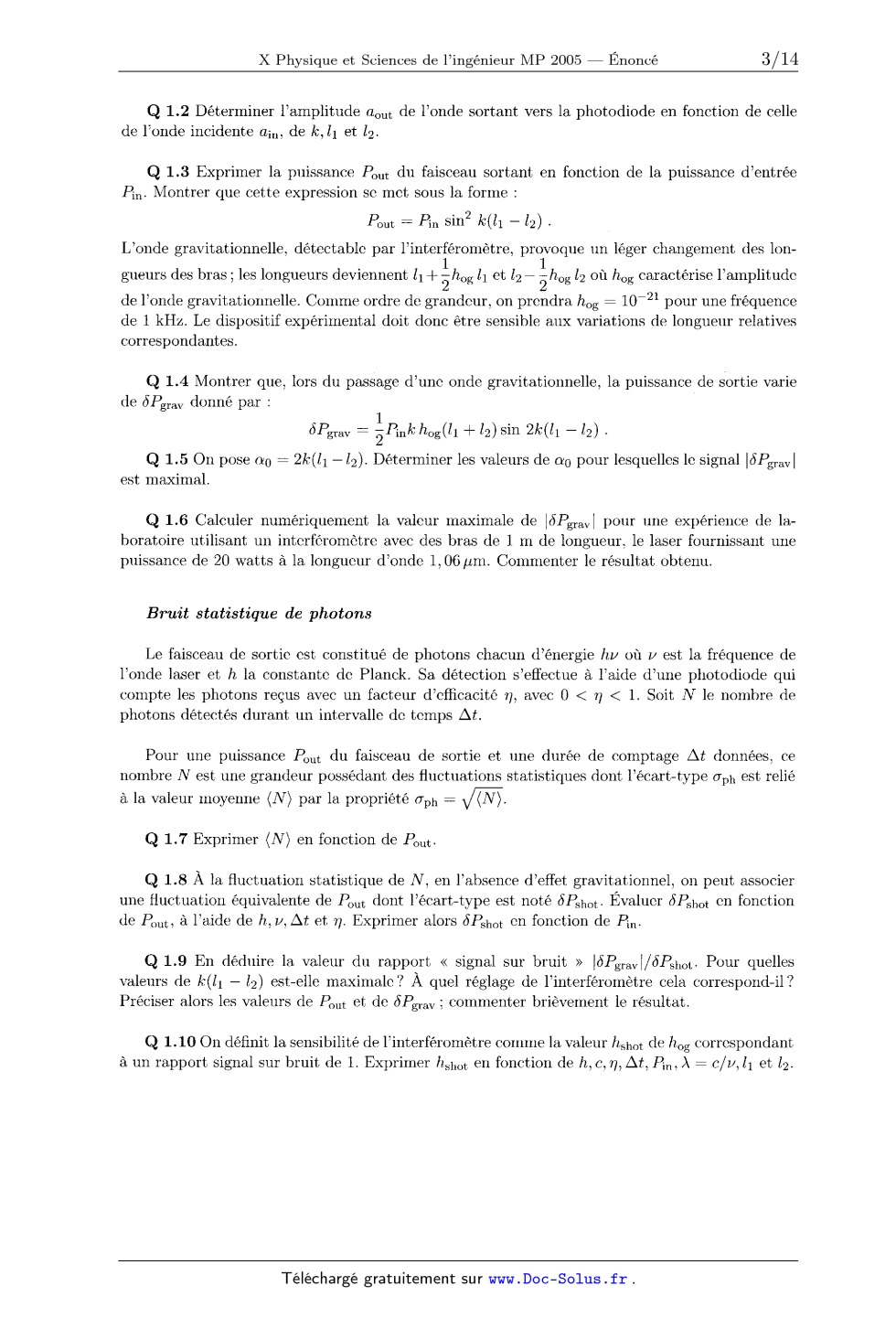
compte les photons reçus avec un facteur d'efficacité 7], avec 0 < 77 < 1. Soit N le nombre de photons détectés durant un intervalle de temps At. Pour une puissance Po..., du faisceau de sortie et une durée de comptage At données, ce nombre N est une grandeur possédant des fluctuations statistiques dont l'écart--type aph est relié a la valeur moyenne {N ) par la propriété oph : (N ) Q 1.7 Exprimer {N ) en fonction de R.... Q 1.8 À la fluctuation statistique de N, en l'absence d'effet gravitationnel, on peut associer une fluctuation équivalente de R... dont l'écart--type est noté 5PSh0t. Evaluer 5PSh0t en fonction de P...... a l'aide de h,1/,At et 77. Exprimer alors ôPsh0t en fonction de P.... Q 1.9 En déduire la valeur du rapport << signal sur bruit » |5PgraVI/5PShOE. Pour quelles valeurs de k(11 -- lg) est--elle maximale? À quel réglage de l'interféromètre cela correspond--il? Préciser alors les valeurs de Pont et de ôPgrav ; commenter brièvement le résultat. Q 1.10 On définit la sensibilité de l'interféromètre comme la valeur hshot de hog correspondant a un rapport signal sur bruit de 1. Exprimer hshOt en fonction de h, e, 7), At, P..., À = c/ u, l1 et lg. Q 1.11 Pour détecter les variations temporelles de hog (t), At doit être inférieur aux périodes utiles. Soit f : 1/At la fréquence d'échantillonnage. Dans l'expérience de laboratoire envisagée en 1.6, exprimer hShOt en fonction de f et l'évaluer avec 77 = 0,8 et pour f allant de 10 Hz à 10 kHz. Quelle conclusion peut-on en tirer compte tenu du but à atteindre ? Amélioration du système optique Une première amélioration possible pour se rapprocher de la sensibilité souhaitée consiste a allonger les bras de l'interféromètre; celui de l'expérience Virgo a des bras de 3 km. On modifie de plus le système optique de chaque bras en y formant une << cavité optique >> par
adjonction, près de la séparatrice, de miroirs Bl et B2, partiellement
réfléchissant et identiques;
leur coefficient de réflexion, côté séparatrice, ?" est réel positif; celui,
côté miroir A1 ou A2, en
est l'opposé, soit T' = --7". Ces miroirs sont supposés sans pertes avec r2 +
t2 = 1 où t est leur
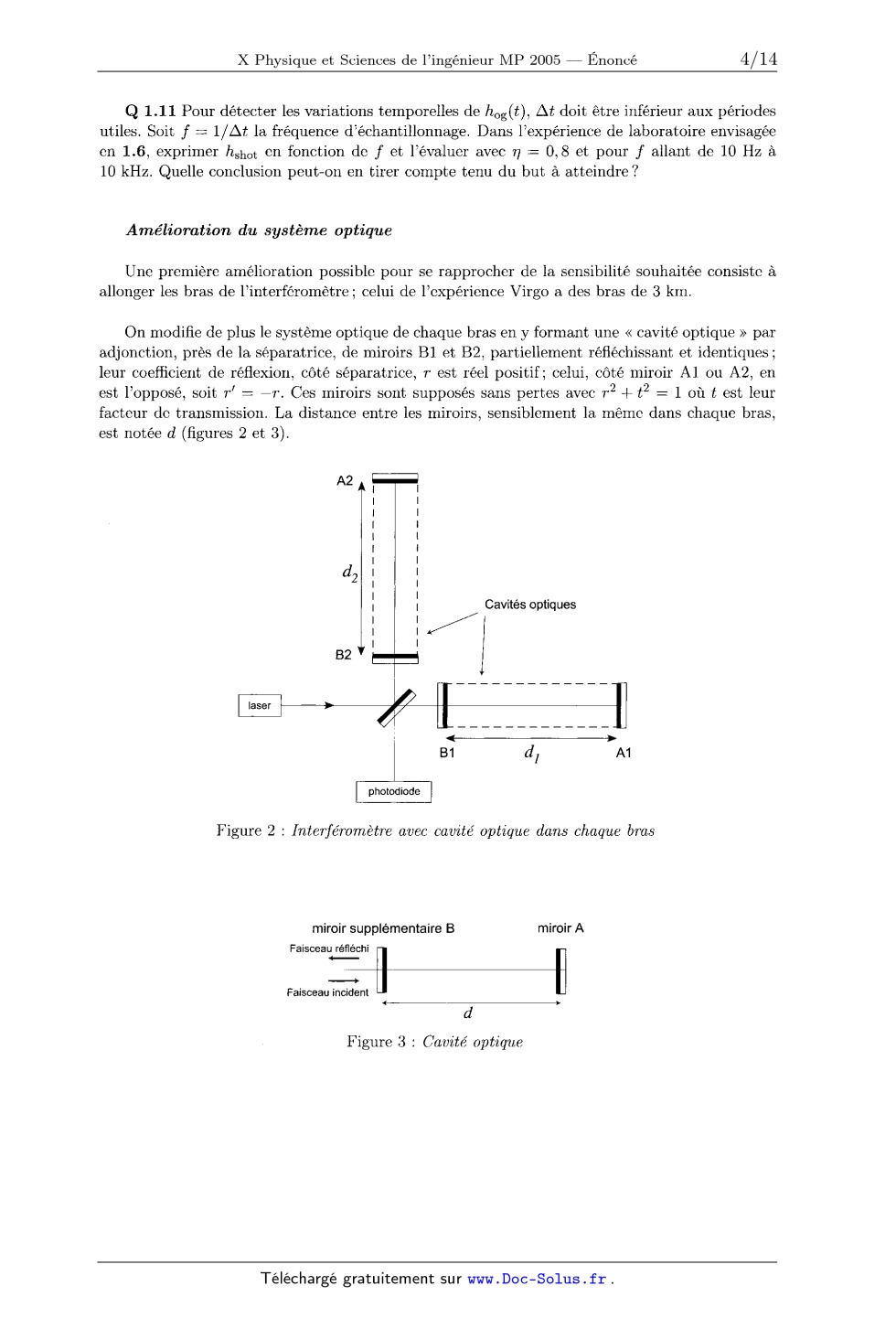
facteur de transmission. La distance entre les miroirs, sensiblement la même
dans chaque bras,
est notée d (figures 2 et 3).
A2:
Cavités optiques
photodiode
Figure 2 : Interfe"mmètre avec cavité optique dans chaque bras
miroir supplémentaire B miroir A
Faisceau réfléchi
{__--
[i
Faisceau incident
4---- >
d
Figure 3 : Cavite' optique
On admettra que, dans chaque bras, le système constitué des deux miroirs en
regard est
équivalent à un miroir unique dont le coefficient de réflexion global pour
l'onde venant de la
séparatrice est donné par :
7" -- exp(--2ikd)
: __ 1
TFP 1 -- rexp(--2ikd) ( )
Q 1.12 Montrer que |7°FP| = 1; interpréter ce résultat. On pose 3 = 2kd; quelle
est la
périodicité de er(fl) ?
d901 -- 72
1.13 On ose 7" = ex --7L . Montrer ue -- ------------------. uelle est la
d
variation de 90 pour [3 allant de ----7r + p27r a 7r + p27r, ]) entier?
Exprimer d_Ë ; l'évaluer
fi=p2vr
dcp
numériquement pour r- -- 0,98. Calculer de même--
dfifi fi=p27ri7r
On s'intéresse à la variation de la phase de l'onde réfléchie produite par une
modification ôd
de la distance d due a l'onde gravitationnelle. On règle pour cela les systèmes
optiques des bras
à fi = p27r, p entier.
Q 1.14 Montrer que ce système optique est alors équivalent à une longueur de
bras d'un
interféromètre simple que l'on précisera. Calculer cette longueur équivalente
pour d = 3 km et
7° = 0,98. Quelle est l'amélioration de sensibilité par rapport à l'appareil de
laboratoire dont les
bras ont une longueur de 1m ?
Q 1.15 Le maximum de sensibilité de l'interféromètre est obtenu lorsqu'il est
réglé pour une
puissance de sortie nulle. Où part l'essentiel de l'énergie lumineuse entrée
dans l'interféromètre ?
Il est possible de la << recycler >> pour augmenter la puissance lumineuse dans
l'appareil. Avec
un recyclage d'un facteur 100, atteint-on la sensibilité souhaitée ?
2. Réduction du bruit de fond sismique; le super-atténuateur
Afin de déceler des valeurs de h0g de l'ordre de 10--21, une réduction du bruit
sismique d'au
moins un facteur 1010 est nécessaire. Pour cela, chaque composant optique de
Virgo est suspendu
à un système anti--sismique, appelé << Super--Atténuateur >> ; on se propose
d'étudier dans cette
partie l'atténuation des mouvements horizontaux.
Principe
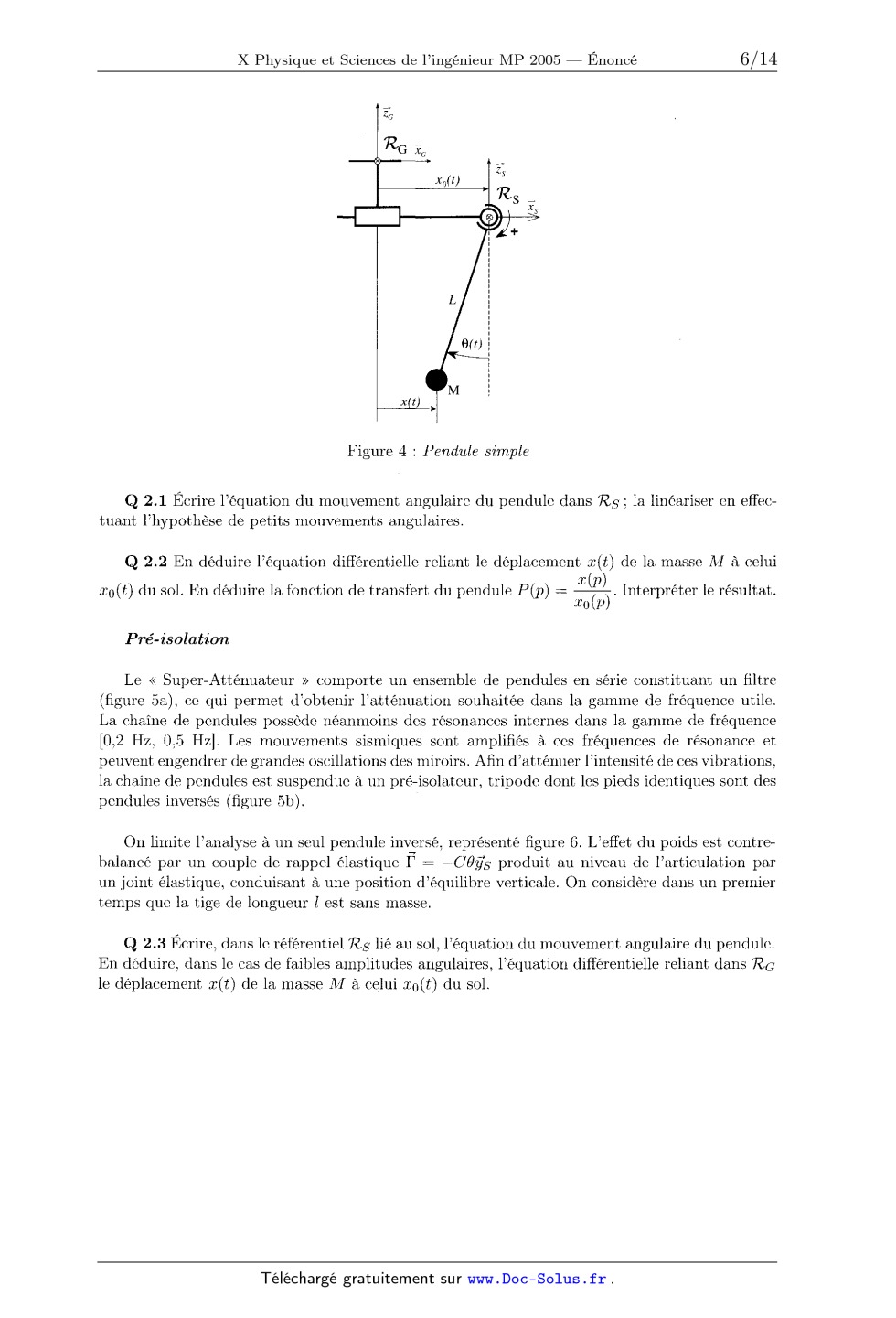
On considère le pendule simple, modélisé figure 4, constitué d'une masse M
suspendue par
un fil de longueur L. Le point de suspension, attaché au sol, est soumis, par
rapport au réfé--
rentiel Rg(:ïîg, ÿg, Eg) galiléen fixe, a un déplacement horizontal d'origine
sismique oe0(t). Soit
R5(Î5, fig, 25) le référentiel lié au sol et en translation selon ÎG par
rapport a RG,
Figure 4 : Pendule simple
Q 2.1 Écrire l'équation du mouvement angulaire du pendule dans 725 ; la
linéariser en effec--
tuant l'hypothèse de petits mouvements angulaires.
Q 2.2 En déduire l'équation différentielle reliant le déplacement a:(t) de la
masse M a celui
æ(p)
OE0(P)
æ0(t) du sol. En déduire la fonction de transfert du pendule P(p) : .
lnterpréter le résultat.
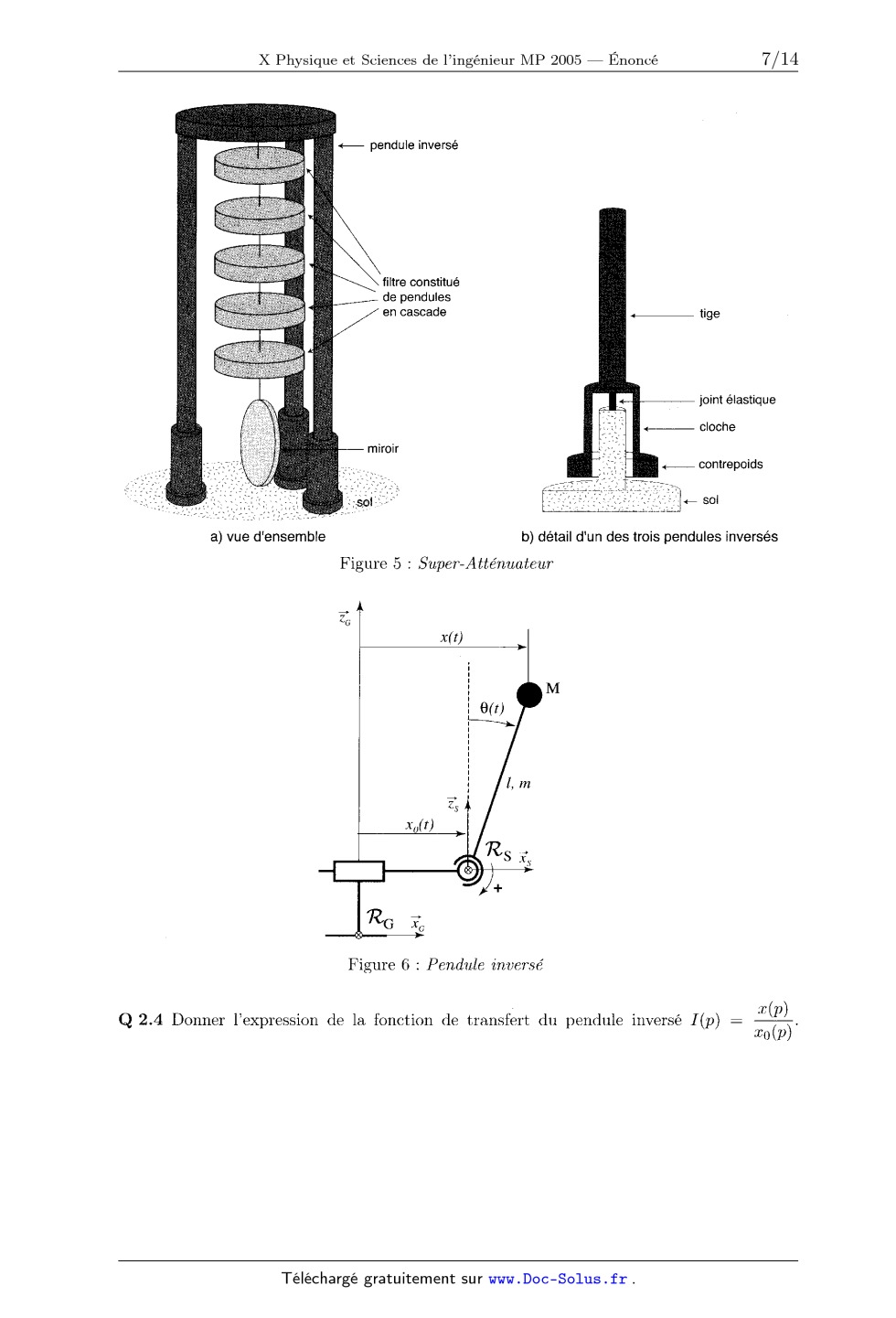
Pré-isolation
Le << Super--Atténuateur >> comporte un ensemble de pendules en série
constituant un filtre
(figure 5a), ce qui permet d'obtenir l'atténuation souhaitée dans la gamme de
fréquence utile.
La chaîne de pendules possède néanmoins des résonances internes dans la gamme
de fréquence
[0,2 Hz, 0,5 Hz]. Les mouvements sismiques sont amplifiés a ces fréquences de
résonance et
peuvent engendrer de grandes oscillations des miroirs. Afin d'atténuer
l'intensité de ces vibrations,
la chaîne de pendules est suspendue à un pré--isolateur, tripode dont les pieds
identiques sont des
pendules inversés (figure 5b).
On limite l'analyse à un seul pendule inversé, représenté figure 6. L'effet du
poids est contre--
balancé par un couple de rappel élastique F : --CÛÿS produit au niveau de
l'articulation par
un joint élastique, conduisant à une position d'équilibre verticale. On
considère dans un premier
temps que la tige de longueur [ est sans masse.
Q 2.3 Écrire, dans le référentiel 725 lié au sol, l'équation du mouvement
angulaire du pendule.
En déduire, dans le cas de faibles amplitudes angulaires, l'équation
différentielle reliant dans RG
le déplacement oe(t) de la masse M a celui a:0(t) du sol.
4---- pendule inversé
filtre constitué
de pendules ,
en cascade {___ tige
joint élastique
«__---- cloche
miroir
(___ contrepoids
\ :î ? t --:_'i_}*} <_ sol a) vue d'ensemble b) détail d'un des trois pendules inversés Figure 5 : Super--Atténuateur Figure 6 : Pendule inversé OE(p) Q 2.4 Donner l'expression de la fonction de transfert du pendule inversé [(p) = ( ). 350 P La masse m de la tige n'est plus négligée. On désigne par J le moment d'inertie de l'ensemble masse plus tige par rapport à l'axe de rotation et par a la distance de son centre d'inertie G a cet axe. Q 2.5 Montrer que, dans R5, le moment par rapport à l'axe des forces d'inertie est égal à celui d'une force unique --Mt0tàêo Î5 appliquée en G, avec Mt0t : M + m. Écrire l'équation du mouvement du pendule dans R5 et la linéariser. En déduire la nouvelle fonction de transfert I'(p) = OE(p)/OEo(p)- Q 2.6 Calculer lim I ' (jtd) en fonction de m,M et l, le moment d'inertie de la tige par w-->oo
1
rapport à l'axe de rotation étant äm12. Esquisser le diagramme asymptotique de
I ' ( jeu) et en
déduire les propriétés de ce pendule.
Le comportement à haute fréquence du pendule inversé, étudié précédemment, est
indésirable.
Pour palier ce problème, on munit le pendule d'un contrepoids en dessous de la
liaison sphérique
(figure 5b). On arrive ainsi par un choix judicieux à reporter les effets
indésirables au--delà de la
bande de fréquences à atténuer [0,2 Hz, 5 Hz].
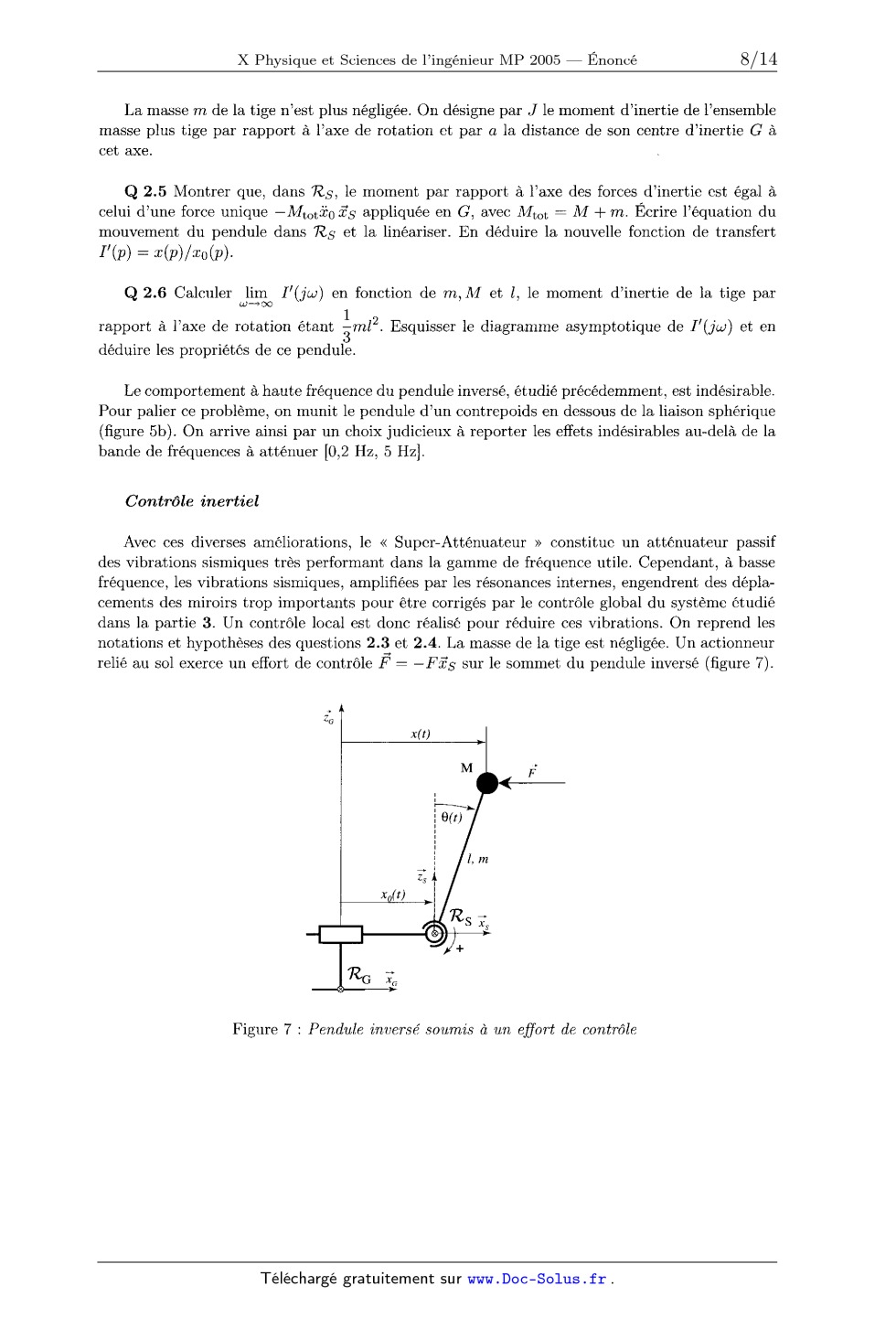
Contrôle inertiel
Avec ces diverses améliorations, le << Super--Atténuateur » constitue un atténuateur passif des vibrations sismiques très performant dans la gamme de fréquence utile. Cependant, à basse fréquence, les vibrations sismiques, amplifiées par les résonances internes, engendrent des dépla-- cements des miroirs trop importants pour être corrigés par le contrôle global du système étudié dans la partie 3. Un contrôle local est donc réalisé pour réduire ces vibrations. On reprend les notations et hypothèses des questions 2.3 et 2.4. La masse de la tige est négligée. Un actionneur relié au sol exerce un effort de contrôle Ë' = --FÎ5 sur le sommet du pendule inversé (figure 7). Figure 7 : Pendule inversé soumis à un efiort de contrôle Q 2.7 Montrer que le mouvement du pendule inversé est régi par l'équation : OE(p) = K?) lOEo(p) -- aF(19)l et exprimer oz en fonction des données du problème. En plus de l'actionneur, on implante sur le sommet du pendule inversé un capteur dont la sortie pilote l'actionneur. On étudie tout d'abord le cas où le capteur mesure l'écart entre les positions de la masse et du sol (figure 8). Pour améliorer l'atténuation, l'effort est du type : Figure 8 : Boucle de rétroaction pour un capteur de position Q 2.8 Exprimer la fonction de transfert A(p) de l'actionneur, puis la fonction de transfert G(p) = .r(p) /æg (p) Quelle est l'influence de 77 sur l'amortissement des résonances du << Super-- Atténuateur >> ? Montrer l'influence de 77 en donnant l'allure du diagramme
asymptotique de Bode
du gain pour différentes valeurs de ce paramètre. Que peut--on en déduire
concernant l'atténuation
des effets des mouvements sismiques lorsque 77 --> oo.
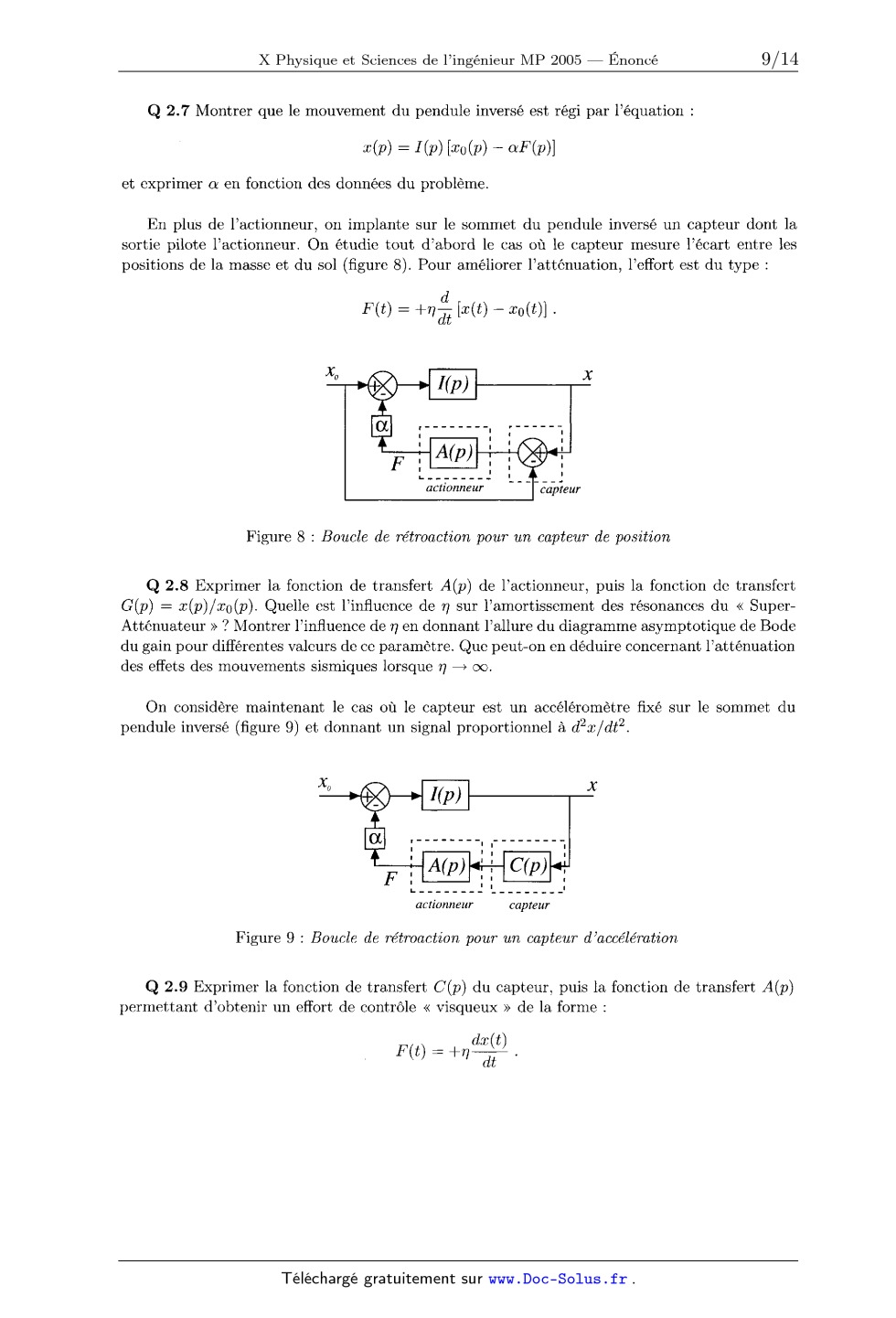
On considère maintenant le cas où le capteur est un accéléromètre fixé sur le
sommet du
pendule inversé (figure 9) et donnant un signal proportionnel à d2æ/dt2.
actionneur capteur
Figure 9 : Boucle de rétroaction pour un capteur d'accélération
Q 2.9 Exprimer la fonction de transfert C (p) du capteur7 puis la fonction de
transfert A(p)
permettant d'obtenir un effort de contrôle << visqueux >> de la forme :
dæ(t)
F(t)=+n dt .
Q 2.10 Déterminer la nouVelle fonction de transfert G(p) : oe(p)/oeo(p).
Étudier l'influence
de 77. Donner les avantages de ce contrôle par rapport au contrôle utilisant un
capteur de position.
Q 2.11 Justifier l'intérêt d'ajouter dans l'effort un terme proportionnel à $.
3. Contrôle global
Une fois les bruits atténués, on souhaite concevoir un système d'asservissement
propre à
amener et maintenir le système dans sa position de fonctionnement optimale :
cavités optiques
des bras en résonance et Michelson avec puissance de sortie nulle. Oet
asservissement, appelé
contrôle global, est réalisé en agissant à la fois sur la fréquence du laser et
sur la position des
composants optiques du système. Il nécessite plusieurs signaux de commande
construits à partir
de plusieurs signaux d'erreur. On analyse une méthode de construction d'un tel
signal d'erreur
permettant soit l'asservissement du laser soit unasservissement de position.
Création d'un signal d'erreur
Q 3.1 On souhaite asservir la fréquence du laser et les différentes cavités de
l'expérience.
Dans un cas général où l'on dispose d'un signal V(wL) dépendant de la pulsation
wL du laser,
on peut envisager de construire un signal d'erreur e(wL) : V(wL) -- V(w0) et
d'asservir la cavité
interne du laser à partir de ce signal pour qu'il oscille a um. Peut-on
utiliser pour cela directement
un signal continu V(wL) qui passe par un extremum pour wL : wo ?
Q 3.2 Pour asservir malgré tout le laser à la pulsation cm en utilisant un
signal V(wL)
extrémal pour @@ = wo, une solution est de moduler la fréquence wL du laser
selon la loi
wL : wc + acos(Qt) avec la condition Q/a << 1. Cette condition implique que wL varie suf-- fisamment lentement pour que l'on puisse utiliser la même fonction wL l-->
V(wL). On mesure à.
l'aide d'un détecteur adéquat l'amplitude SQ de la composante de V a la
pulsation Q.
Développer V(wL) au second ordre autour de l'extremum, et montrer que SQ est
proportionnel
à a(wC -- wo). Peut--on asservir le laser sur ce signal d'erreur? Quel est
l'inconvénient de cette
méthode si la largeur de la résonance est très étroite ?
Q 3.3 On utilise en pratique une méthode un peu différente. On module la phase
de l'onde
incidente, ce qui donne a l'entrée de la cavité (oe : O) : E,... : EO exp
i(wyî+bsin Qt) avec b << 1. Montrer, en développant cette expression au premier ordre en b que ce signal se décompose en une << porteuse >> de pulsation wL et deux << bandes >> latérales de
pulsations ou L :t Q.
À d fixé, le coefficient de réflexion rFP : exp(--igo) de la cavité optique
(cf. expression (1)
et 1.13) dépend de wL par l'intermédiaire de fi(wL) : 2kd : 2de/c. On choisit Q
tel que
fi(wL i Q) soit proche de p027r i 7r, pg entier.
Q 3.4 Montrer a l'aide des résultats numériques de 1.14, que l'on peut prendre
rFP(wL i Q) : 1. Etablir alors l'expression au niveau du miroir B de l'onde
réfléchie par la
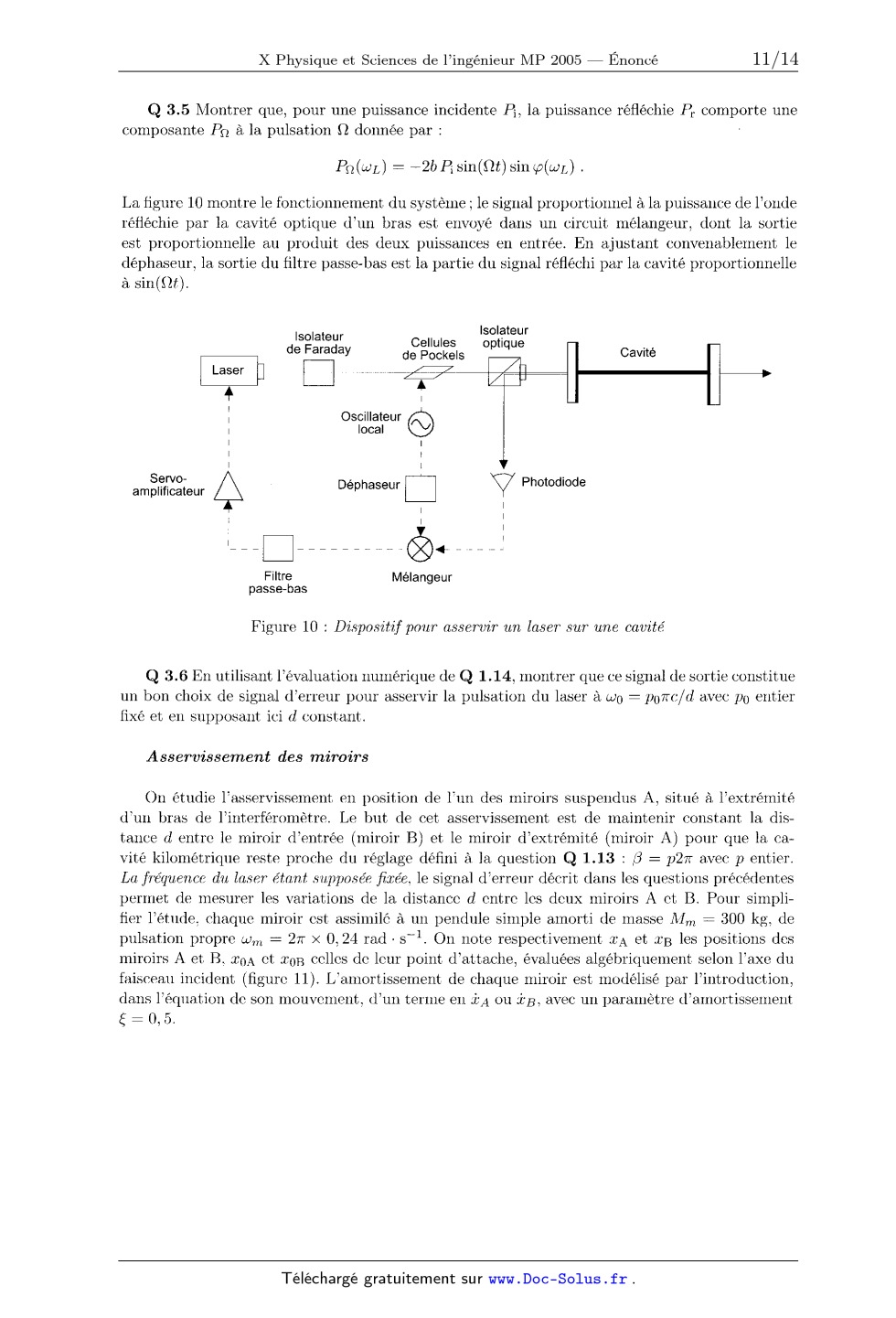
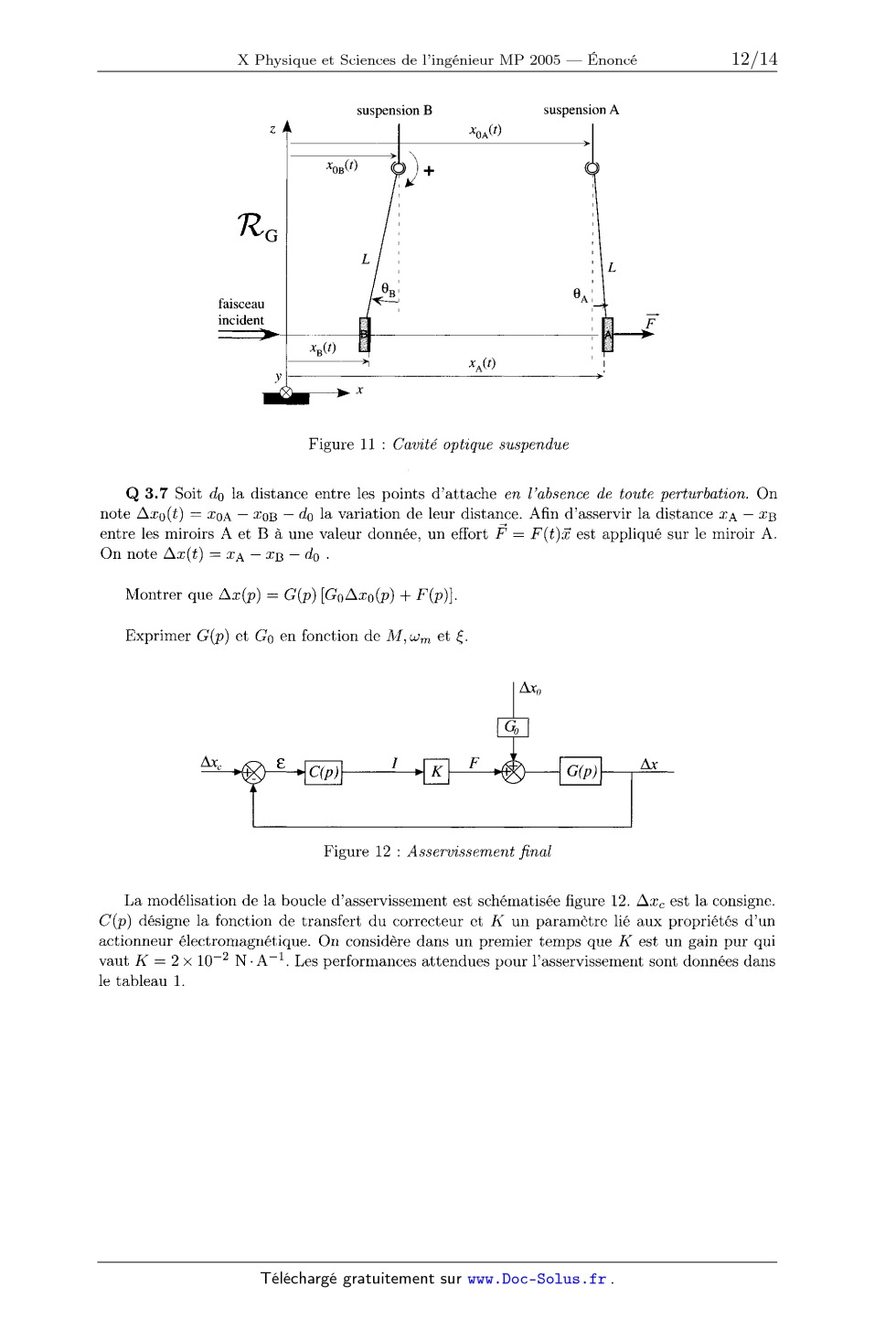
cavité en fonction de EQ, 1), ca,, Q,t et < O, 24 rad - s"'. On note respectivement :UA et 333 les positions des miroirs A et B, oe0A et OE0B celles de leur point d'attache, évaluées algébriquement selon l'axe du faisceau incident (figure 11). L'amortissement de chaque miroir est modélisé par l'introduction, dans l'équation de son mouvement, d'un terme en :Ï3A ou 5533, avec un paramètre d'amortissement g=0,5. suspension B suspension A faisceau incident Figure 11 : Cautte' optique suspendue Q 3.7 Soit do la distance entre les points d'attache en l'absence de toute perturbation. On note Aæo(t) : oe0A -- :EOB ---- do la variation de leur distance. Afin d'asservir la distance a:A -- 5133 entre les miroirs A et B à. une valeur donnée, un effort Ë' = F (t)f est appliqué sur le miroir A. On note Aæ(t) = oeA -- a:B -- d0 . Montrer que Aoe(p) : G(p) [G0Aæo(p) + F(p)]. Exprimer G(p) et GO en fonction de M , w... et EUR . Figure 12 : Asserutssement final La modélisation de la boucle d'asservissement est schématisée figure 12. Aoec est la consigne. C (p) désigne la fonction de transfert du correcteur et K un paramètre lié aux propriétés d'un actionneur électromagnétique. On considère dans un premier temps que K est un gain pur qui vaut K = 2 >< 10_2 N - A_1. Les performances attendues pour l'asservissement sont données dans le tableau 1. CRITÈRES NIVEAUX Erreur statique relative 58 < 10"3 pour une entrée en échelon Rapidité Temps du premier maximum T ... < 300 ms Marge de phase Md> > 45°
Marge de gain Mg > 6 dB
Tableau 1 - Performances attendues pour l'asservissement en position des miroirs
Q 3.8 Aa:(p) peut se mettre sous la forme Aoe(p) : Hc(p)Aoec(p) + Hg(p)Aæg (p)
Exprimer Hc(p) et Hg(p) en fonction de C(p), K, GO et C(p).
On se propose, dans le cas où la perturbation est négligée, soit Aa:0 (p) = 07
de dimensionner
successivement un correcteur proportionnel puis un correcteur proportionnel
intégral.
Correction proportionnelle
On note C (p) : C0 le correcteur proportionnel.
8(19)
AOEc (p)
de précision. Calculer CO avec les valeurs numériques données précédemment.
Q 3.9 Déterminer . Exprimer la condition sur CO qui permet de satisfaire le
critère
AOE(p)
. Calculer les marges de
609)
Q 3.10 Exprimer la fonction de transfert en boucle ouverte
phase et de gain. Peut-on atteindre les performances attendues ?
Correction proportionnelle intégrale
1+TOP
le correcteur proportionnel intégral.
TOP
On note C(p) : C1
Q 3.11 Donner l'allure et commenter les diagrammes asymptotiques de Bode du
gain et de
la phase du correcteur C (p) Expliquer en le justifiant l'intérêt de placer ce
correcteur dans la
boucle d'asservissement.
On admettra que le temps de montée du système en boucle fermée T ... est lié a
la pulsation
de coupure à 0 dB du système en boucle ouverte, notée wOC, par la relation
«00ch : .
Q 3.12 Calculer la pulsation de coupure {.doc qui respecte le critère sur le
temps de montée.
Calculer TO afin de respecter le critère de stabilité sur la marge de phase.
Calculer enfin C1 afin
d'obtenir effectivement la pulsation de coupure déterminée précédemment.
Sensibilité auæ perturbations sismiques
Pour limiter l'influence des perturbations sismiques Aoe0 sur la régulation, on
retient le prin--
cipe du feed-forward qui consiste à mesurer les perturbations et a les injecter
a un autre endroit
de la boucle d'asservissement (figure 13).
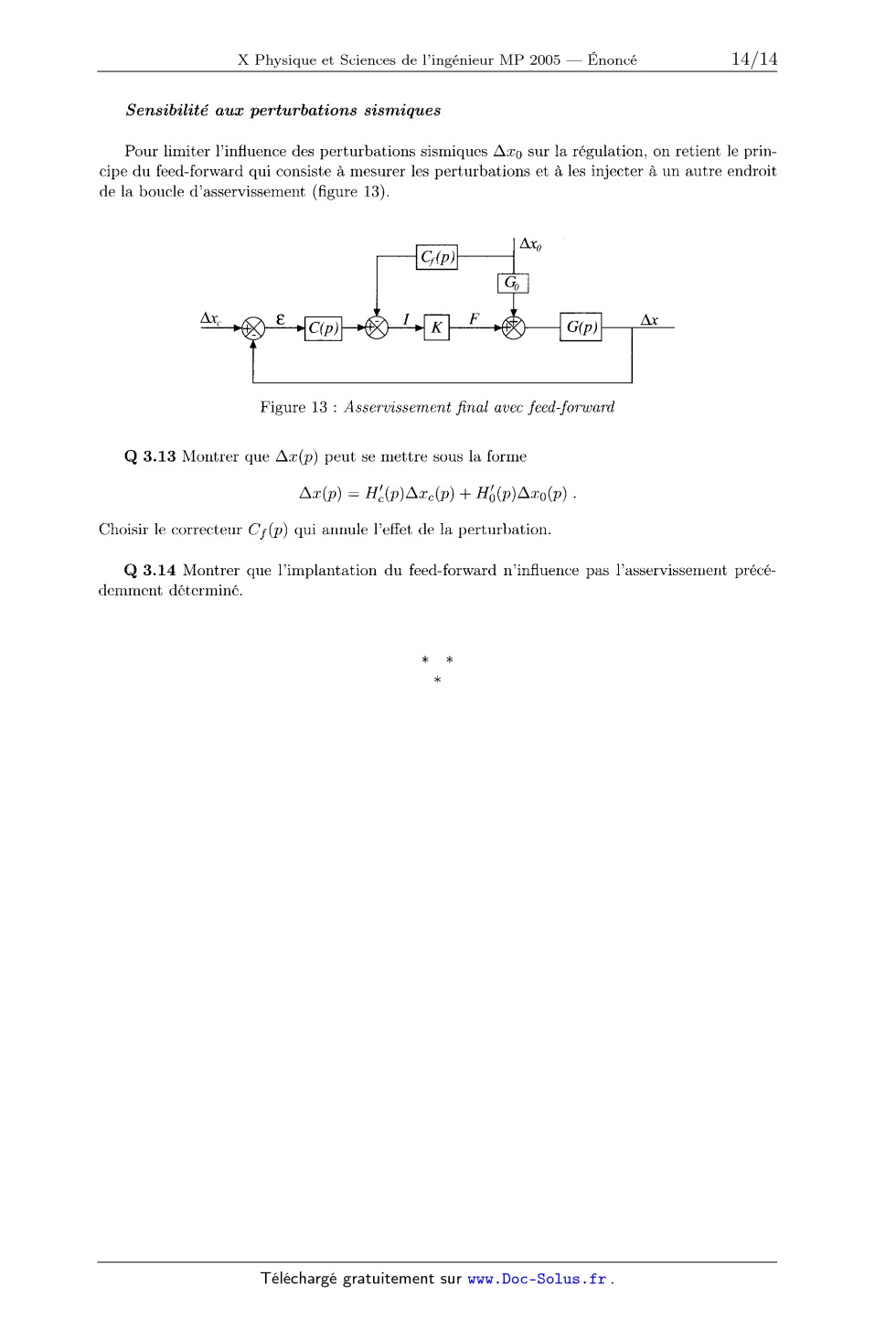
Figure 13 : Asservissement final avec feed--forward
Q 3.13 Montrer que Aoe(p) peut se mettre sous la forme
A£L'(19) = Hé(p)Aoec(p) + H6(p)Aæo(p) --
Choisir le correcteur Cf(p) qui annule l'effet de la perturbation.
Q 3.14 Montrer que l'implantation du feed--forward n'influence pas
l'asservissement précé--
demment déterminé.