
Centrale Physique et Chimie 1 MP 2025
| Thème de l'épreuve | Observation et protection côtières |
| Principaux outils utilisés | électromagnétisme, optique ondulatoire, électronique, solutions aqueuses, oxydoréduction, courbes courant-potentiel, cristallographie |
| Mots clefs | effet Doppler, échantillonnage, eau de mer, dépôt électrolytique, aragonite, carbonate |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
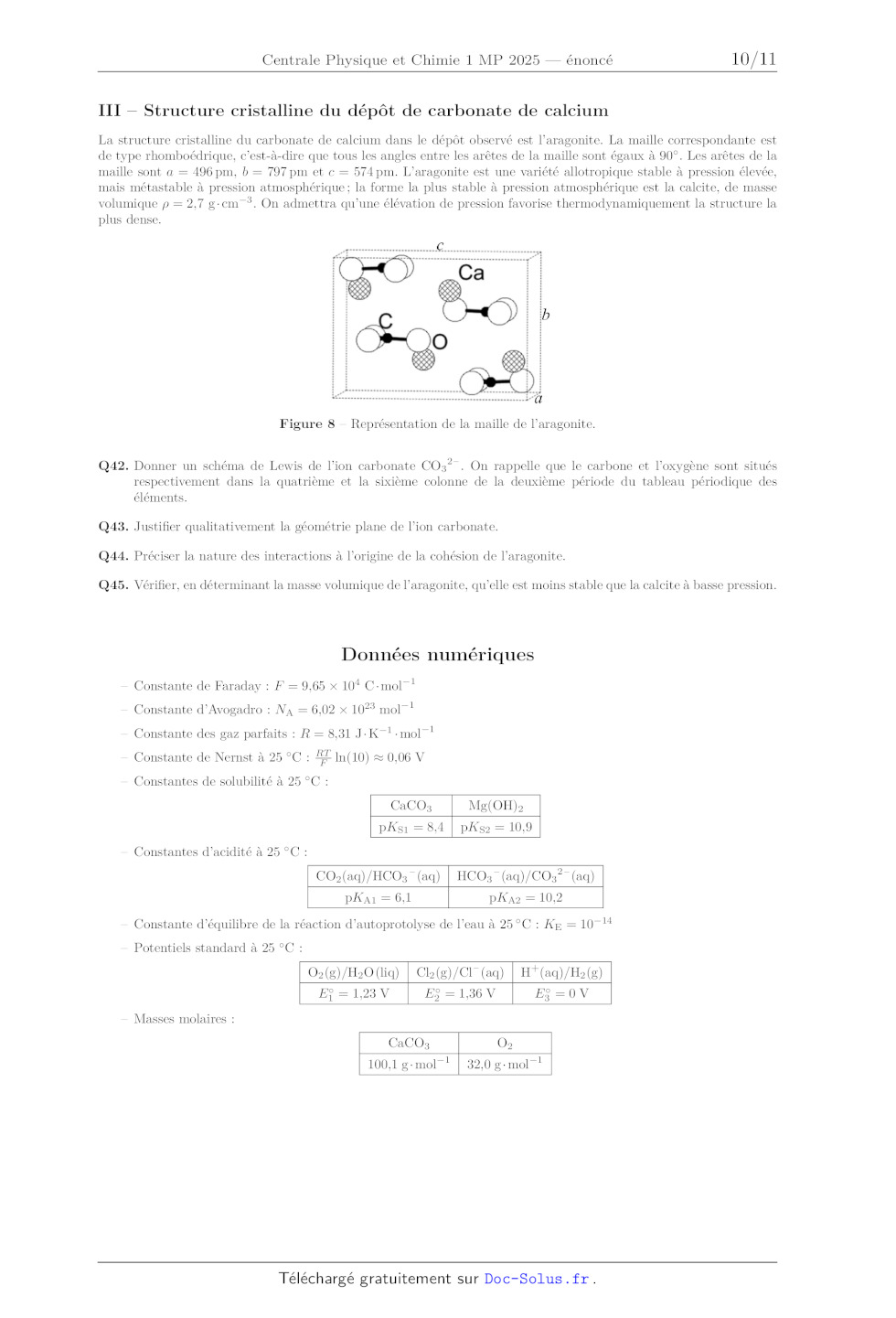
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - -
Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
MP
4 heures
Calculatrice autorisée
2025
Physique-chimie 1
Observation et protection côtières
Lorsqu'ils circulent au voisinage des côtes, les courants marins de surface
exercent une influence sur les activités
humaines se déroulant en mer, près du rivage. Ils jouent également un rôle
déterminant dans l'érosion du littoral et
dans la dégradation d'infrastructures côtières, phénomènes en cours
d'aggravation sous l'effet de l'évolution du climat.
Les deux premières parties de ce problème analysent une technique de
télédétection permettant l'observation de ces
courants jusqu'à des distances de l'ordre de 100 km. La troisième, qui peut
être abordée indépendamment des deux
précédentes, décrit une solution novatrice de protection et de construction
d'ouvrages maritimes.
Certaines questions, peu ou pas guidées, demandent de l'initiative de la part
du candidat. Elles sont repérées par un
soulignement de leur numéro. Il est alors demandé d'expliciter clairement la
démarche, les choix et de les illustrer, le
cas échéant, par un schéma. Le barème valorise la prise d'initiative et tient
compte du temps nécessaire à la résolution
de ces questions.
Des données numériques sont fournies en fin d'énoncé. On note l'unité
imaginaire telle que 2 = -1.
Partie A Principes physiques d'un radar océanographique
En 1955, D.D. Crombie découvre que la réflexion d'une onde radio sur la mer
produit un écho caractéristique, qu'il
interprète par l'interaction du champ électromagnétique avec les vagues agitant
la surface de l'eau. À partir de là,
divers instituts ont développé des techniques d'observation à distance de
l'état de la mer. Elles utilisent un radar
côtier émettant une onde de la bande HF (haute fréquence, entre 3 et 30 MHz) et
recevant l'onde rétrodiffusée (ou
réfléchie) par l'interface entre l'air et l'eau (figure 1). Le développement de
ces instruments se poursuit aujourd'hui et
cette partie aborde les principes physiques sur lesquels leur fonctionnement
repose.
Figure 1 Radar côtier émettant une onde HF vers la surface
de la mer et recevant l'onde rétrodiffusée
I Modèle optique et loi de Bragg
La rétrodiffusion d'une onde électromagnétique par la mer obéit à la loi de
Bragg. Pour l'expliquer, on peut en première
analyse ignorer la forme précise des vagues pour ne tenir compte que de leur
aspect périodique. On assimile la surface
#"
de l'eau à un réseau de diffraction inclus dans le plan (0, u# "
x , uz ), formé d'éléments réflecteurs identiques, invariants par
#
"
#
"
translation selon uz et se répétant selon ux avec une période L égale à la
longueur d'onde des vagues (figure 2). L'onde
radar incidente, plane, monochromatique de longueur d'onde , rencontre cette
surface avec un angle d'incidente i.
On considère l'onde réfléchie vers l'infini dans la direction repérée par
l'angle .
Figure 2 Modélisation de la surface de la mer par un réseau.
Les éléments réfléchissants sont hachurés.
1 / 12
Q1. Établir l'expression de la différence de marche entre les ondes réfléchies
par deux motifs successifs du réseau.
Q2. Justifier sans calcul que l'onde rétrodiffusée sera particulièrement
intense dans les directions telles que
p Z, L(sin + sin i) = p .
(1)
Par analogie avec la cristallographie, et selon l'usage adopté en
océanographie, cette relation sera dans la suite appelée
loi de Bragg.
II Modèle du conducteur parfait
Pour établir un lien entre l'amplitude du signal rétrodiffusé et la hauteur des
vagues, il convient de décrire plus
précisément la surface de la mer et le champ électromagnétique. On repère un
point de l'interface air-eau par sa
hauteur h(x) par rapport au plan de référence d'équation y = 0. Dans l'air, au
point M et à l'instant t, l'onde
incidente émise par le radar, de fréquence f et de pulsation , possède en
notation complexe le champ électrique
#" # "
#"
Ei (M,t) = A e(K i ·OM -t) u# "z avec
#"
#"
K i = ki u# "
x - qi uy
(2)
où A, ki > 0 et qi > 0 sont des constantes.
#"
Q3. L'air étant assimilé au vide, démontrer l'équation de propagation à
laquelle Ei obéit et en déduire la relation
entre ki , qi et .
En pénétrant dans l'eau de mer depconductivité électrique = 4 S · m-1 , l'onde
électromagnétique HF s'atténue sur
une épaisseur caractéristique a = 1/(µ0 f ), un peu comme elle le ferait dans
un métal de splitéabilité magnétique
µ0 = 4 × 10-7 H · m-1 . Pour simplifier, on convient de traiter cette eau comme
un conducteur parfait.
Q4. En comparant les ordres de grandeur de plusieurs grandeurs pertinentes,
analyser l'acceptabilité de cette simplification pour les ondes de la bande HF.
Dans le modèle du conducteur parfait, et compte tenu de la polarisation choisie
ici, le champ électrique est nul
au voisinage immédiat de l'interface. Dans un premier temps, on considère la
situation définie par h(x) = 0 (mer
#"
parfaitement plate) et on cherche l'onde réfléchie sous la forme E r = Er u# "z
avec
#" --
#"
#"
#"
E r (M,t) = r0 A e(K 0 .OM -t) u# "z et K 0 = k0 u# "
x + q0 uy , q0 > 0.
Q5. Trouver le coefficient de réflexion r0 et exprimer k0 en fonction de ki .
Justifier enfin l'égalité q0 = qi .
On tient dorénavant compte de l'agitation de la mer et, pour déterminer le
champ électrique réfléchi, on s'appuie
sur une méthode perturbative fondée sur l'hypothèse que la hauteur h, quoique
non nulle, reste assez faible. Plus
précisément, en désignant par q la composante verticale d'un vecteur d'onde
électromagnétique, on pose = qh et on
suppose || 1. On limite tous les calculs à l'ordre 1 en et on cherche le
champ électrique réfléchi sous la forme
#"
E r = Er u# "z avec
Er (M,t) = -A e(ki x+qi y-t) + r1 A e(kr x+qr y-t) + . . . . . .
(3)
Dans cette écriture, le facteur inconnu r1 est d'ordre 1 et les points de
suspension désignent des termes négligeables
d'ordre plus élevé.
--
Q6. Détailler l'expression du vecteur OM pour un point de l'interface air-eau.
Montrer que la présence de cette
frontière se traduit par la relation
-2qi h(x)eki x + r1 ekr x = 0 .
(4)
Pour des vagues sinusoïdales de longueur d'onde L, on pose
h(x) = h0 cos(kv x) =
h0 kv x h0 -kv x
e
+ e
2
2
avec
kv =
2
.
L
On poursuit les calculs en ne prenant en compte que le terme e-kv x (l'autre
conduit à une onde diffusée selon +ux ,
inutilisable par le radar).
Q7. Exprimer r1 en fonction de qi et h0 , et kr en fonction de ki et kv .
Indiquer quel intérêt la mesure de r1 présente
en ce qui concerne l'étude de l'état de la mer.
Q8. À partir du résultat de la question précédente, retrouver la loi de Bragg
(1) rencontrée dans la question Q2,
pour un ordre p à préciser.
2 / 12
Un radar océanographique est installé sur la côte, à quelques mètres au dessus
du niveau de la mer, et l'irradie à des
distances de l'ordre de plusieurs dizaines de kilomètres. L'onde rétrodiffusée
est détectée au même point où l'onde
incidente est émise. Dans ce contexte, on utilise la loi de Bragg sous la forme
simplifiée
L=
.
2
(5)
Q9. Expliquer sous quelles hypothèses et/ou approximations cette égalité se
déduit de la relation (1).
Sous l'effet du vent, des vagues de toutes les longueurs d'onde se développent
à la surface de la mer dont l'état
instantané peut être décrit par une superposition de déformations harmoniques,
chacune relevant de l'étude conduite
dans les questions précédentes. La fréquence d'émission du radar étant donnée,
seuls les termes de cette décomposition
qui vérifient la loi de Bragg produisent un écho significatif.
Q10. Pour un radar émettant à 12,3 MHz, trouver numériquement la longueur
d'onde des vagues sélectionnées.
III Effet Doppler
Dans les questions précédentes, on a implicitement supposé l'interface air-eau
immobile, comme si la mer s'était
brusquement figée. En réalité, les vagues ne sont pas statiques et la hauteur h
dépend non seulement de x, mais aussi
de l'intant t. Une onde de vague harmonique, de période L et de pulsation
spatiale kv , possède aussi une pulsation
#"
temporelle v et voyage à la vitesse U dans la direction de u# "
x , sous forme d'onde progressive dans le sens de ux ou
bien en sens inverse. L'amplitude est comme plus haut notée h0 .
Q11. Proposer en notation réelle deux expressions de h(x,t) correspondant aux
deux sens de propagation des vagues
et donner la relation entre U , v et kv .
L'onde radar incidente se réfléchit sur l'interface air-eau mobile à la vitesse
±U u# "
x , ce qui entraîne un décalage de la
fréquence fr de l'onde réfléchie par rapport à celle f de l'onde incidente. Ce
phénomène nommé effet Doppler est régi
par la relation ci-dessous, valable dans la limite où U est très inférieure à
la célérité c de la lumière dans le vide :
fr - f ±
2U
.
(6)
La relation (6) est à la base de la vélocimétrie radar, par exemple pour le
contrôle routier. Cependant, dans le contexte
d'étude, ce n'est pas l'eau qui se déplace, mais uniquement la forme de son
interface avec l'air. Les questions qui suivent
permettent de justifier que la relation (6) s'applique encore dans ce cas. Le
symbole ± (plus ou moins) regroupe des
situations où les vagues s'éloignent ou s'approchent de la côte et on va aussi
voir quel signe il convient de choisir dans
chaque cas.
En lieu et place de la relation (4), la présence de l'interface se traduit
désormais par la relation suivante (qu'on ne
demande pas d'établir) faisant intervenir la pulsation r de l'onde réfléchie :
-2qi h(x,t)e(ki x-t) + r1 e(kr x-r t) = 0 .
Dans le cas d'une onde s'éloignant du rivage, la méthode de décomposition
complexe présentée dans le cas statique
(section II) conduit à considérer que
h0 -(kv x-v t)
h(x,t) =
e
.
2
Q12. Trouver, d'une part, l'expression de r en fonction de et v et, d'autre
part, celle de kr en fonction de ki et kv .
La rétrodiffusion vers le radar correspond à la valeur négative kr = -r /c.
Q13. En utilisant les deux relations établies dans la question précédente,
montrer que fr est donnée par l'un des deux
cas de la relation (6). Fournir ensuite l'expression de fr pour une onde
s'approchant du rivage.
IV Mesure de courants de surface
La vitesse U de progression des vagues dépend de leur longueur d'onde L selon
la relation
p
U = gL/(2)
où g est l'accélération de la pesanteur.
3 / 12
(7)
Q14. En utilisant la loi de Bragg, montrer que fr - f = ±fB et exprimer la
fréquence de Bragg fB en fonction de g
et .
En plus des vagues, la surface de la mer est soumise à un courant de surface :
sur une épaisseur variant de quelques
mètres à plusieurs centaines de mètres, l'eau s'écoule à la vitesse constante
et uniforme #"
v = vx u# "
x . Dans ce cas, la
relation (7) ne s'applique plus dans le référentiel terrestre R (où le radar
est fixe), mais dans le référentiel R en
translation à la vitesse vx u# "
x par rapport à R.
Q15. Dans le référentiel R, exprimer d'une part la vitesse des vagues
s'approchant du rivage et d'autre part celle des
vagues qui s'en éloignent (on distinguera sans ambiguïté les deux cas). Montrer
qu'en présence de courants de
surface,
fr - f = ±fB + fD
(8)
et donner l'expression du décalage Doppler fD en fonction de vx et de c.
Puissance (dB)
Puissance (dB)
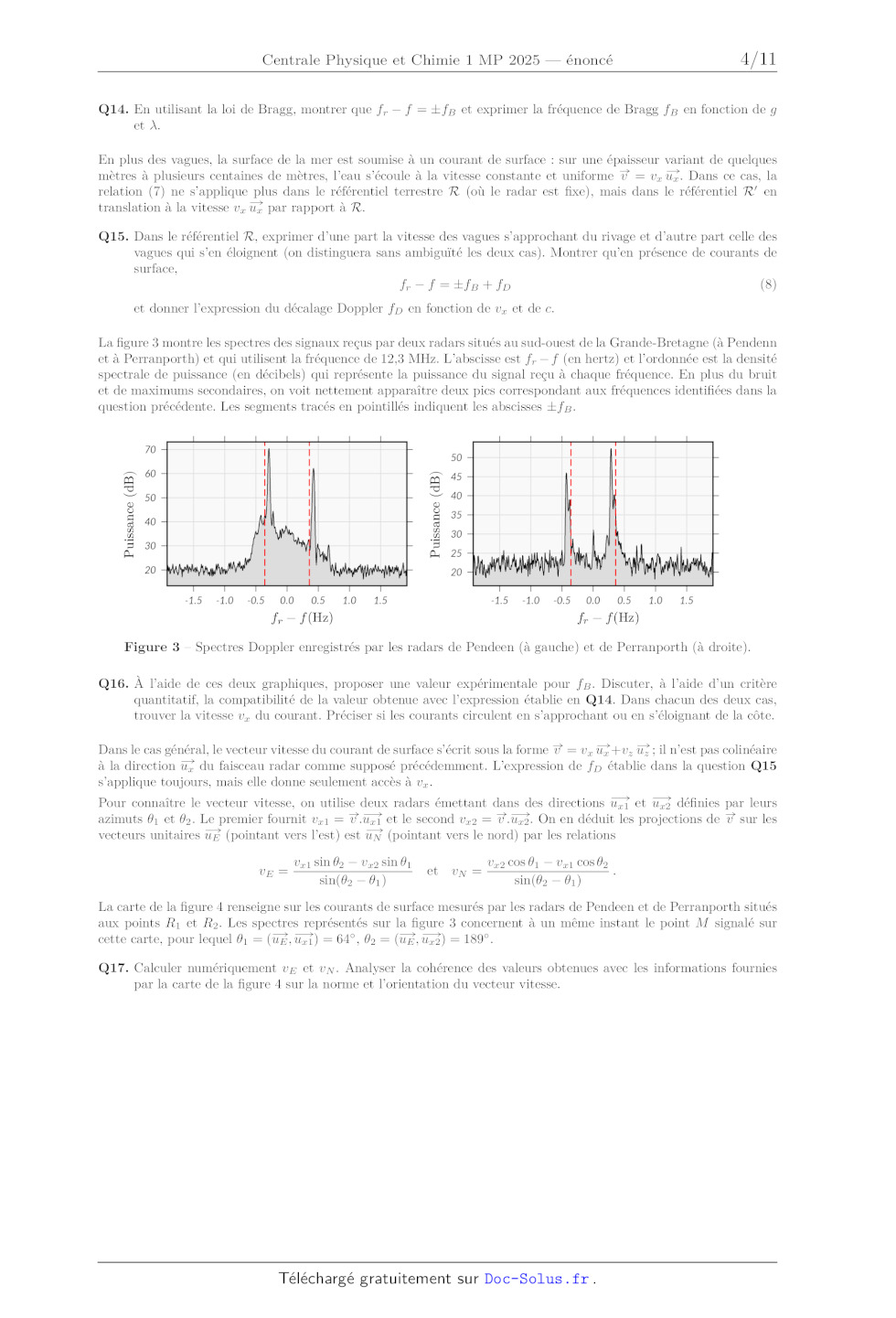
La figure 3 montre les spectres des signaux reçus par deux radars situés au
sud-ouest de la Grande-Bretagne (à Pendenn
et à Perranporth) et qui utilisent la fréquence de 12,3 MHz. L'abscisse est fr
- f (en hertz) et l'ordonnée est la densité
spectrale de puissance (en décibels) qui représente la puissance du signal reçu
à chaque fréquence. En plus du bruit
et de maximums secondaires, on voit nettement apparaître deux pics
correspondant aux fréquences identifiées dans la
question précédente. Les segments tracés en pointillés indiquent les abscisses
±fB .
fr - f (Hz)
fr - f (Hz)
Figure 3 Spectres Doppler enregistrés par les radars de Pendeen (à gauche) et
de Perranporth (à droite).
Q16. À l'aide de ces deux graphiques, proposer une valeur expérimentale pour fB
. Discuter, à l'aide d'un critère
quantitatif, la compatibilité de la valeur obtenue avec l'expression établie en
Q14. Dans chacun des deux cas,
trouver la vitesse vx du courant. Préciser si les courants circulent en
s'approchant ou en s'éloignant de la côte.
#"
Dans le cas général, le vecteur vitesse du courant de surface s'écrit sous la
forme #"
v = vx u# "
x +vz uz ; il n'est pas colinéaire
#
"
à la direction ux du faisceau radar comme supposé précédemment. L'expression de
fD établie dans la question Q15
s'applique toujours, mais elle donne seulement accès à vx .
" et u# " définies par leurs
Pour connaître le vecteur vitesse, on utilise deux radars émettant dans des
directions u# x1
x2
#"
#
"
#"
#
"
azimuts 1 et 2 . Le premier fournit vx1 = v .ux1 et le second vx2 = v .ux2 . On
en déduit les projections de #"
v sur les
vecteurs unitaires u# " (pointant vers l'est) est u# " (pointant vers le nord)
par les relations
E
N
vE =
vx1 sin 2 - vx2 sin 1
sin(2 - 1 )
et vN =
vx2 cos 1 - vx1 cos 2
.
sin(2 - 1 )
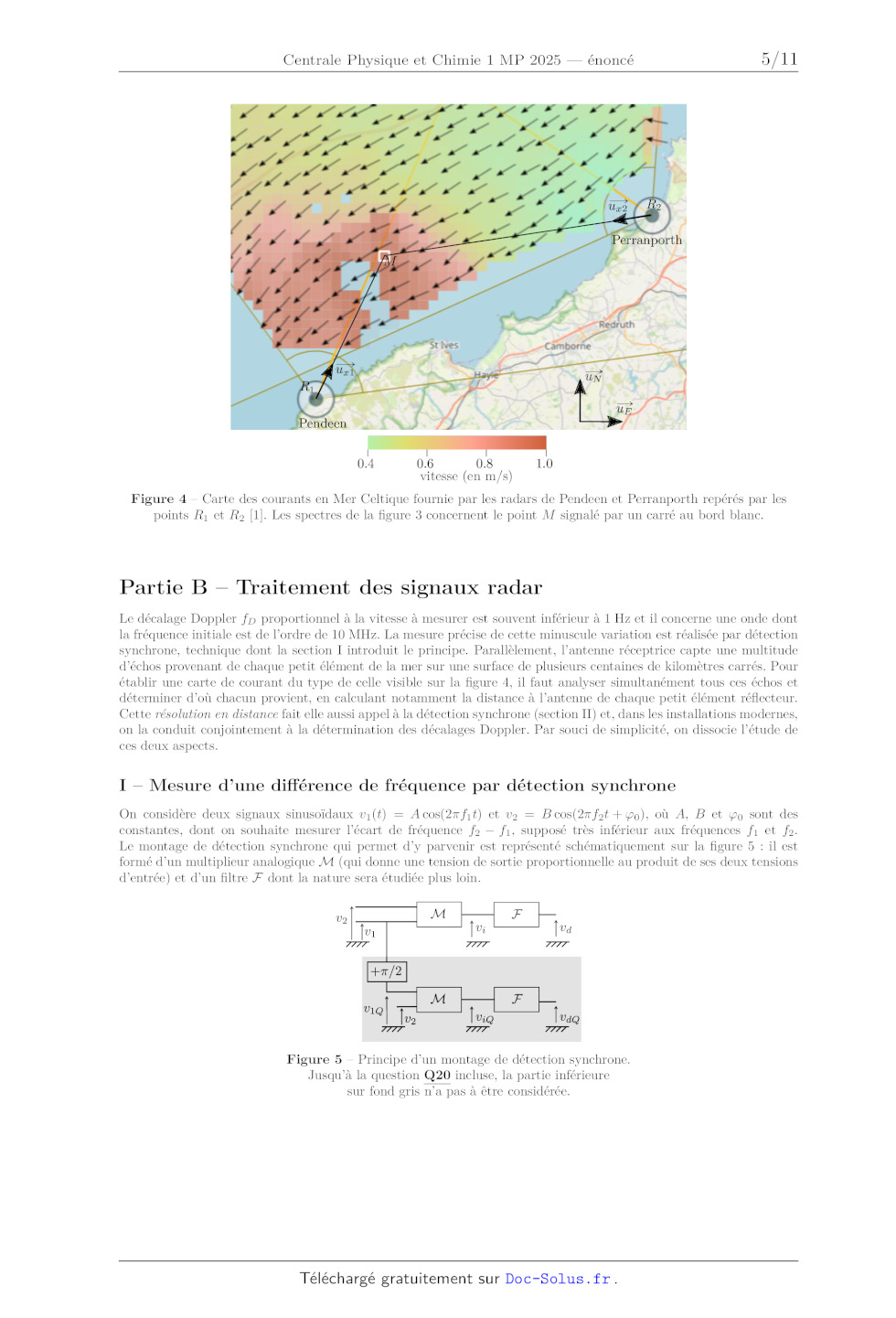
La carte de la figure 4 renseigne sur les courants de surface mesurés par les
radars de Pendeen et de Perranporth situés
aux points R1 et R2 . Les spectres représentés sur la figure 3 concernent à un
même instant le point M signalé sur
") = 64 , = (u# ", u# ") = 189 .
cette carte, pour lequel 1 = (u# E", u# x1
2
E
x2
Q17. Calculer numériquement vE et vN . Analyser la cohérence des valeurs
obtenues avec les informations fournies
par la carte de la figure 4 sur la norme et l'orientation du vecteur vitesse.
4 / 12
"
u# x2
R2
Perranporth
M
"
u# x1
u# N"
R1
u# E"
Pendeen
0.4
0.8
0.6
vitesse (en m/s)
1.0
Figure 4 Carte des courants en Mer Celtique fournie par les radars de Pendeen
et Perranporth repérés par les
points R1 et R2 [1]. Les spectres de la figure 3 concernent le point M signalé
par un carré au bord blanc.
Partie B Traitement des signaux radar
Le décalage Doppler fD proportionnel à la vitesse à mesurer est souvent
inférieur à 1 Hz et il concerne une onde dont
la fréquence initiale est de l'ordre de 10 MHz. La mesure précise de cette
minuscule variation est réalisée par détection
synchrone, technique dont la section I introduit le principe. Parallèlement,
l'antenne réceptrice capte une multitude
d'échos provenant de chaque petit élément de la mer sur une surface de
plusieurs centaines de kilomètres carrés. Pour
établir une carte de courant du type de celle visible sur la figure 4, il faut
analyser simultanément tous ces échos et
déterminer d'où chacun provient, en calculant notamment la distance à l'antenne
de chaque petit élément réflecteur.
Cette résolution en distance fait elle aussi appel à la détection synchrone
(section II) et, dans les installations modernes,
on la conduit conjointement à la détermination des décalages Doppler. Par souci
de simplicité, on dissocie l'étude de
ces deux aspects.
I Mesure d'une différence de fréquence par détection synchrone
On considère deux signaux sinusoïdaux v1 (t) = A cos(2f1 t) et v2 = B cos(2f2 t
+ 0 ), où A, B et 0 sont des
constantes, dont on souhaite mesurer l'écart de fréquence f2 - f1 , supposé
très inférieur aux fréquences f1 et f2 .
Le montage de détection synchrone qui permet d'y parvenir est représenté
schématiquement sur la figure 5 : il est
formé d'un multiplieur analogique M (qui donne une tension de sortie
proportionnelle au produit de ses deux tensions
d'entrée) et d'un filtre F dont la nature sera étudiée plus loin.
Figure 5 Principe d'un montage de détection synchrone.
Jusqu'à la question Q20 incluse, la partie inférieure
sur fond gris n'a pas à être considérée.
5 / 12
Q18. Exprimer à un facteur près le signal intermédiaire vi , puis justifier que
son spectre fait apparaître les fréquences
f2 +f1 et |f2 -f1 |. Indiquer le type de filtrage qui permet d'obtenir, à la
sortie du filtre, un signal vd de fréquence
|f2 - f1 |.
Le traitement des signaux radars fait intervenir des composants spécifiques aux
hautes fréquences. Pour des ultrasons
au contraire, avec des fréquences de l'ordre de 104 Hz, des composants usuels
disponibles dans un lycée (résistances,
condensateurs et bobines d'auto-induction) fonctionneraient.
Q19. Proposer pour F un schéma électrique de filtre passif convenable, sans
préciser pour l'instant les valeurs des
composants. Un filtre d'ordre 1 est acceptable mais le jury valorisera
davantage un filtre d'ordre 2, plus efficace.
Q20. Exprimer la fonction de transfert du montage de la question précédente.
Pour f1 f2 40 kHz, proposer des
valeurs réalistes pour les composants du filtre F.
À l'issue du filtrage, vd est pratiquement sinusoïdal et mesurer sa fréquence
revient à mesurer |f2 - f1 |, ce qui était le
but à atteindre. Cependant, dans le cas de l'effet Doppler (où f1 = f et f2 =
fr ), il est important de connaître le signe
de f2 - f1 (Partie A section III). Pour cela, on complète le montage de la
figure 5 par une seconde voie (représentée
sur fond gris) dans laquelle on applique des opérations analogues après avoir
déphasé v1 de +/2 (démodulation en
quadrature).
Q21. Dans l'hypothèse d'un filtrage idéal, exprimer le signal vdQ et expliquer
comment son observation conjointe à
celle de vd permet d'obtenir le signe de f2 - f1 .
II Mesure de distance par modulation de fréquence
La mesure de la distance des éléments réflecteurs fonctionne elle aussi par
détection synchrone grâce à une modulation
de la fréquence de l'onde émise. Alors qu'un signal de fréquence f0 constante
varie selon cos(2f0 t), le champ électrique
émis par l'antenne est proportionnel à la tension ve (t), Tm -périodique et
définie sur une période par
Bt
t.
(9)
t [0, Tm [, ve (t) = A cos (t) avec (t) = 2 f0 +
2Tm
La grandeur positive B, homogène à une fréquence et très inférieure à f0 , est
appelée largeur de bande. La période de
répétition Tm est de l'ordre de quelques dixièmes de secondes et f0 de l'ordre
de 10 MHz.
1 d
On définit la fréquence instantanée f (t) de ve par f (t) =
(t).
2 dt
Q22. Exprimer f (t) et tracer schématiquement le graphe de ses variations sur
deux périodes.
La cible qui réfléchit l'onde, supposée ici immobile, se trouve à la distance d
de l'antenne émettrice. À l'instant t, la
station radar dispose du signal d'émission ve (t) et du signal d'écho vr (t).
Ce dernier provient de la réflexion par la cible
du signal émis un peu plus tôt, de sorte que sa fréquence fr (t) à l'instant t
est celle que possédait ve à l'instant t - .
Q23. Donner l'expression de . Pour d = 10 km, vérifier qu'il est très
inférieur à Tm , puis représenter sur un même
graphique les variations de f (t) et fr (t). Les deux courbes seront légendées
et tracées en deux couleurs distinctes.
Pour ce graphique seulement, on prendra = Tm /10.
Les signaux ve (t) et vr (t) sont appliqués à l'entrée du montage de détection
synchrone (représenté figure 5 et étudié
dans la section I).
Q24. Exprimer la fréquence fd du signal démodulé vd . Montrer que sa mesure
permet d'accéder à la distance d de la
cible, qu'on exprimera en fonction de c, B et Tm .
III Questions liées à l'échantillonnage
En pratique, l'écho reçu par un radar océanographique n'est pas parfaitement
harmonique et la tension vd issue de la
détection synchrone présente de petites variations aléatoires. Elles se
superposent au signal sinusoïdal idéal attendu
et en compliquent l'exploitation. Pour mesurer la fréquence fd , le signal
bruité est échantillonné et numérisé, puis on
procède à son analyse spectrale par transformée de Fourier discrète (TFD).
6 / 12
III.1 Analyse spectrale par TFD
L'analyse spectrale par TFD est une technique couramment mise en oeuvre dans
les oscilloscopes numériques et les
logiciels accompagnant les cartes d'acquisition. Son calcul est généralement
conduit par l'algorithme de transformée
de Fourier rapide (de sigle fréquemment rencontré FFT).
On considère un signal analogique v(t) dont on a prélevé Ne échantillons vn =
v(tn ) aux instants tn = nTe avec
n {0, 1, 2, ..., Ne - 1}. La TFD permet d'afficher Ne valeurs |S(fk )|
associées aux fréquences fk = k/(Ne Te ) avec
k {0, 1, 2, ..., Ne - 1}. Selon les paramètres Ne et Te choisis pour
l'échantillonnage, ces nombres |S(fk )| constituent
une représentation plus ou moins fidèle du spectre de v.
Q25. Expliquer en quoi consiste le phénomène de « repliement du spectre » et
comment s'en prémunir.
L'échantillonnage sur une durée finie limite la capacité à distinguer, dans le
spectre de v, des composantes harmoniques
possédant des fréquences f1 et f2 très proches. On appelle résolution spectrale
la valeur de |f2 -f1 | en dessous de laquelle
cette distinction est impossible ; elle s'identifie ici à la précision f sur
l'échelle des fréquences. À titre d'exemple, on
a représenté sur la figure 6 la TFD de la fonction v(t) suivante, qui comporte
un léger bruit aléatoire (t) superposé :
v(t) = A cos(2f1 t) + A cos(2f2 t) + (t) avec
A = 2 V,
f1 = 150 Hz ,
f2 = 160 Hz ,
|(t)| < 0,1 V . (10) Sur le spectre de gauche, Ne = 100, Te = 2 ms ; sur celui de droite Ne = 100, Te = 0,5 ms. Ces valeurs numériques ont été choisies dans un but illustratif et n'ont aucun lien avec celles mises en jeu dans le traitement des signaux radars. Pour plus de lisibilité, le graphique a été restreint aux fréquences inférieures à 250 Hz. 2 |S(f )| (V) |S(f )| (V) 2 1 0 1 0 0 50 100 150 fréquence (Hz) 200 250 0 50 100 150 fréquence (Hz) 200 250 Figure 6 Exemples de spectres obtenus par TFD du signal donné par l'expression (10) pour deux choix des paramètres d'échantillonnage. Q26. Commenter ces deux spectres et analyser leur capacité à révéler les composantes spectrales de v(t). Exprimer en fonction de Ne et Te la précision en fréquence f (identique à la résolution spectrale), et donner sa valeur numérique dans chacun des deux cas. Dans les radars océanographiques, une double TFD permet d'obtenir simultanément les informations relatives à la vitesse vx de la cible (fr -f = ±fB +fD , question Q15) et celles relatives à sa distance (fr -f est lié à d, question Q24). Comme annoncé au début de la partie, on traite séparément ces deux phénomènes dans les sous-sections III.2 et III.3 respectivement, comme si chacun existait indépendamment de l'autre. III.2 Limite et résolution en vitesse Sur chaque rampe de modulation, de durée Tm , un échantillon de vd est acquis et on répète cette opération N fois pour une durée d'acquisition Ta = N Tm . Les données sont ici f = 29,85 MHz, fB = 0,56 Hz, Tm = 0,262 s et B = 125 kHz (radar WERA de la société Helzel Messtechnik). Q27. Indiquer jusqu'à quelle fréquence maximale on peut obtenir le spectre pour en déduire fr - f . En déduire la valeur maximale de fD atteignable et la vitesse vx maximale associée. On rappelle que ces grandeurs ont été reliées l'une à l'autre dans la question Q15. Q28. Pour N = 4096, fournir la résolution spectrale de la mesure de f - fr . En déduire la résolution vx sur la vitesse vx . 7 / 12 III.3 Limite et résolution en distance Au sein d'une unique rampe de modulation de durée Tm = 0,262 s, M échantillons équidistants de vd sont acquis en vue du calcul de la TFD. Q29. Exprimer la valeur maximale fd max de fd que l'on peut déduire de l'analyse de ce spectre. Pour une portée de radar dmax égale à 50 km, proposer une valeur de M compatible. On rappelle que d et fd ont été reliées l'une à l'autre dans la question Q24. Q30. Indiquer quelle est la résolution spectrale sur la mesure de fd . En déduire la résolution en distance d. Pour information, la société Helzel Messtechnik indique que l'utilisateur peut paramétrer le radar et choisir des résolutions de 0,3 km, 0,6 km et 1,2 km. Partie C Protection du littoral par dépôt électrolytique La formation de dépôts de carbonate de calcium et d'hydroxyde de magnésium sur une cathode métallique plongée dans l'eau de mer est un phénomène bien connu que Sir Humphry Davy a décrit dès les années 1840. Depuis quelques décennies, de nombreuses équipes ont cherché à le provoquer de manière contrôlée en réalisant des électrolyses sur des armatures immergées en milieu marin. En effet, le solide ainsi formé peut jouer le rôle de ciment et conduire, en agglomérant des sédiments présents au voisinage du métal, à la constitution de structures minérales capables de protéger des infrastructures portuaires de l'érosion, de favoriser l'installation d'organismes marins et de piéger des polluants présents dans l'eau de mer. I Composition de l'eau de mer La composition de l'eau de mer présente des variations géographiques et en fonction de la profondeur. Le tableau 1 donne un exemple de composition d'une eau de mer artificielle commercialisée pour réaliser des expériences scientifiques. Sel introduit Formule M (g · mol-1 ) Concentration (g · L-1 ) Chlorure de sodium NaCl 58,4 26,5 Chlorure de magnésium MgCl2 95,2 2,4 Sulfate de magnésium heptahydraté MgSO4 , 7H2 O 246,5 6,75 Chlorure de calcium dihydraté CaCl2 , 2H2 O 147,0 1,46 Chlorure de potassium KCl 74,6 0,73 Hydrogénocarbonate de sodium NaHCO3 84,0 0,20 Bromure de sodium NaBr 102,9 0,30 pH = 8,1 Tableau 1 Composition d'une eau de mer artificielle (BS2011). La formation de carbonate de calcium dans l'eau de mer est modélisée par la réaction d'équation : Ca2+ (aq) + HCO3 - (aq) + HO- (aq) = CaCO3 (s) + H2 O(liq) . (11) Q31. Établir le diagramme de prédominance des différentes formes acidobasiques du dioxyde de carbone dissout en fonction du pH. En déduire l'espèce prédominante au pH de l'eau de mer (pH = 8,1). Q32. Calculer la constante thermodynamique d'équilibre de la réaction (11). L'eau de mer est souvent sursaturée en carbonate de calcium, c'est-à-dire que la formation du sel CaCO3 (s) est thermodynamiquement spontanée, mais cinétiquement bloquée. Q33. Déterminer si c'est le cas de l'eau de mer dont la composition est décrite dans le tableau 1. Q34. Calculer le pH d'apparition du précipité Mg(OH)2 (s) lorsqu'on ajoute des ions hydroxyde HO à l'eau de mer étudiée. 8 / 12 II Électrolyse de l'eau de mer et réactions cathodiques En vue de réaliser l'électrolyse de l'eau de mer, on commence par étudier les réactions possibles à la cathode en traçant des courbes courant/potentiel dans l'eau de mer pour une cathode en acier. L'eau de mer est à l'équilibre avec l'air (pression partielle de dioxygène P (O2 ) = 0,20 bar) et contient donc du dioxygène dissout. Un exemple de courbe courant/potentiel obtenue est donné dans la figure 7. L'électrode de référence est une électrode au calomel saturée (ECS) de potentiel Eref = 0,22 V. Densité de courant (mA/cm2 ) 0 -0,5 -1 -1,5 -2 -2,5 -1,2 -1,1 -1 -0,9 -0,8 -0,7 -0,6 -0,5 -0,4 E - Eref (V) Figure 7 Courbe courant/potentiel cathodique pour une électrode d'acier. Q35. Calculer le potentiel d'oxydoréduction à T = 298 K du couple O2 (g)/H2 O(liq) au pH de l'eau de mer (pH = 8,1) à l'équilibre avec l'air. Q36. Calculer de même le potentiel d'oxydoréduction du couple H+ (aq)/H2 (g) au pH de l'eau de mer à l'équilibre pour une pression partielle de dihydrogène de 1 bar. Dans les deux questions suivantes, on ne prend en compte que les réactions électrochimiques impliquant les couples de l'eau sans intervention des autres ions présents dans l'eau de mer. Q37. Pour chacun des domaines de potentiel ci-dessous, écrire la (les) réaction(s) électrochimique(s) observée(s) et expliquer l'allure de la courbe dans le domaine correspondant : (a) -1,00 V < U < -0,45 V ; (b) U < -1,00 V. Q38. Indiquer sur un graphique comment serait modifiée la courbe si elle était tracée avec une eau de mer contenant une plus faible concentration de dioxygène dissout. On constate que, lorsqu'on applique à une cathode en acier plongée dans de l'eau de mer un potentiel de -0,80 V par rapport à l'électrode au calomel saturée, il se forme à sa surface un dépôt dense de carbonate de calcium CaCO3 , tandis que, pour un potentiel appliqué inférieur à -1,10 V par rapport à l'ECS, le dépôt contient à la fois du carbonate de calcium CaCO3 et de l'hydroxyde de magnésium Mg(OH)2 . Q39. Expliquer ces observations. On étudie à présent l'ensemble de la cellule d'électrolyse. Le métal de l'anode est supposé inoxydable, et la cathode est une plaque d'acier utilisée dans le domaine de potentiel -1,00 V < U < -0,45 V par rapport à l'électrode au calomel saturée. L'électrolyte est de l'eau de mer. Q40. Montrer que deux réactions sont envisageables à l'anode. Q41. Faire un schéma de la cellule d'électrolyse en fonctionnement en indiquant le sens de circulation du courant et la ou les réaction(s) aux électrodes. 9 / 12 III Structure cristalline du dépôt de carbonate de calcium La structure cristalline du carbonate de calcium dans le dépôt observé est l'aragonite. La maille correspondante est de type rhomboédrique, c'est-à-dire que tous les angles entre les arêtes de la maille sont égaux à 90 . Les arêtes de la maille sont a = 496 pm, b = 797 pm et c = 574 pm. L'aragonite est une variété allotropique stable à pression élevée, mais métastable à pression atmosphérique ; la forme la plus stable à pression atmosphérique est la calcite, de masse volumique = 2,7 g · cm-3 . On admettra qu'une élévation de pression favorise thermodynamiquement la structure la plus dense. Figure 8 Représentation de la maille de l'aragonite. Q42. Donner un schéma de Lewis de l'ion carbonate CO3 2 . On rappelle que le carbone et l'oxygène sont situés respectivement dans la quatrième et la sixième colonne de la deuxième période du tableau périodique des éléments. Q43. Justifier qualitativement la géométrie plane de l'ion carbonate. Q44. Préciser la nature des interactions à l'origine de la cohésion de l'aragonite. Q45. Vérifier, en déterminant la masse volumique de l'aragonite, qu'elle est moins stable que la calcite à basse pression. Données numériques Constante de Faraday : F = 9,65 × 104 C · mol-1 Constante d'Avogadro : NA = 6,02 × 1023 mol-1 Constante des gaz parfaits : R = 8,31 J · K-1 · mol-1 Constante de Nernst à 25 C : RT F ln(10) 0,06 V Constantes de solubilité à 25 C : CaCO3 Mg(OH)2 pKS1 = 8,4 pKS2 = 10,9 Constantes d'acidité à 25 C : CO2 (aq)/HCO3 (aq) HCO3 (aq)/CO3 2 (aq) pKA1 = 6,1 pKA2 = 10,2 Constante d'équilibre de la réaction d'autoprotolyse de l'eau à 25 C : KE = 10-14 Potentiels standard à 25 C : O2 (g)/H2 O(liq) Cl2 (g)/Cl (aq) H+ (aq)/H2 (g) E1 = 1,23 V E2 = 1,36 V E3 = 0 V Masses molaires : CaCO3 100,1 g · mol O2 -1 10 / 12 32,0 g · mol-1 [1] Seaview Sensing Ltd et Université de Plymouth. Seaview Data Viewer. https://phillips.shef.ac.uk/ pub/svdv/whc/spatial (page consultée le 11 mars 25). [2] D.D. Crombie. « Doppler Spectrum of Sea Echo at 13.56 Mc./s. » In : Nature 175.4459 (avr. 1955), p. 681-682. [3] Jeffrey D. Paduan et Libe Washburn. « High-Frequency Radar Observations of Ocean Surface Currents ». In : Annual review of marine science 15 (2013), p. 115-136. [4] Donald E. Barrick. FM/CW Radar Signals and Digital Processing. NOAA Technical Report ERL 283- WPL. Boulder, Colorado : National Oceanic et Atmospheric Administration. [5] Charlotte Carré et al. « Electrochemical calcareous deposition in seawater. A review ». In : Environmental Chemistry Letters 18 (avr. 2020), p. 193-1208. Fin 11 / 12 P084 - 29 avril 2025 - 11:28:13 c b e a Références