
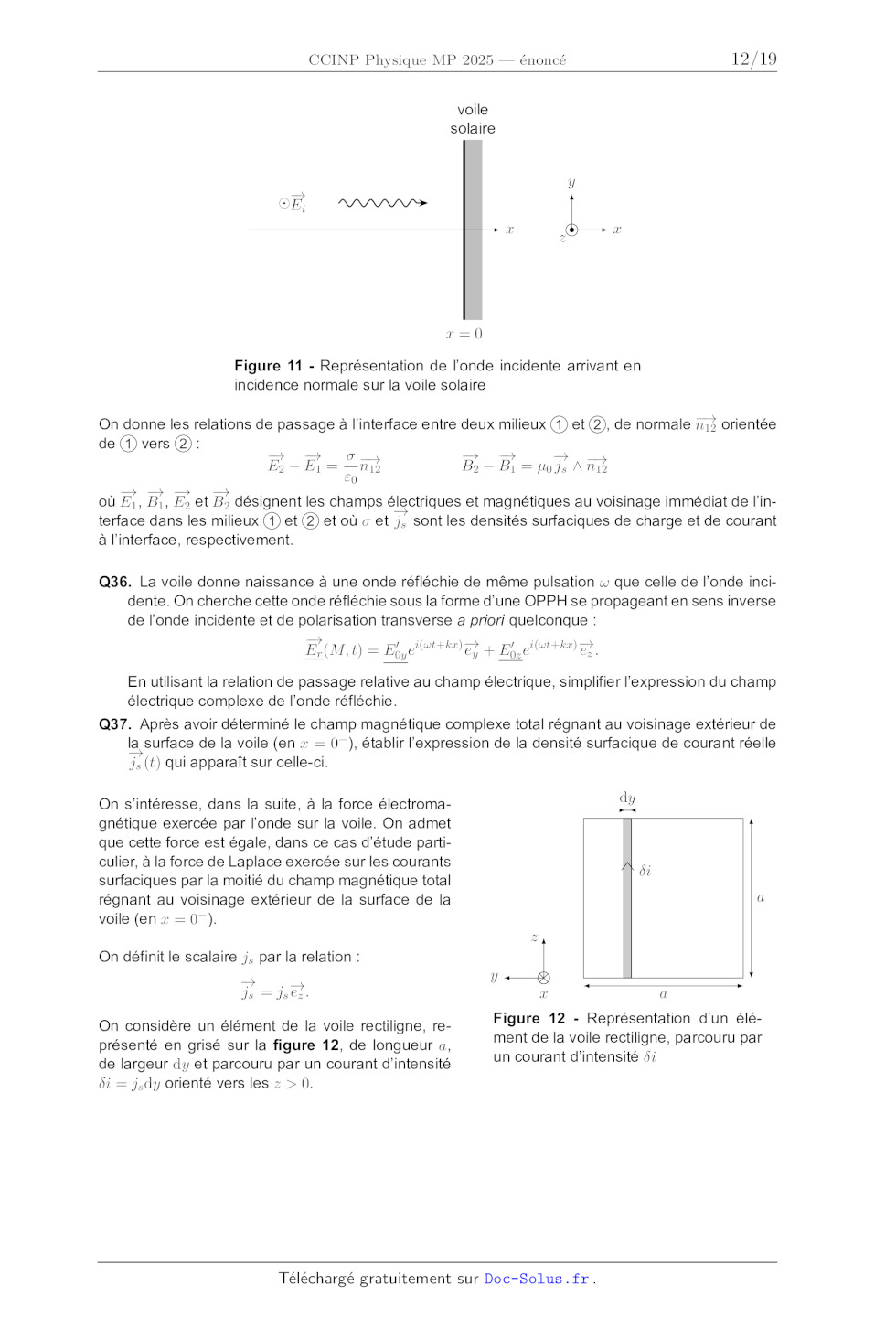
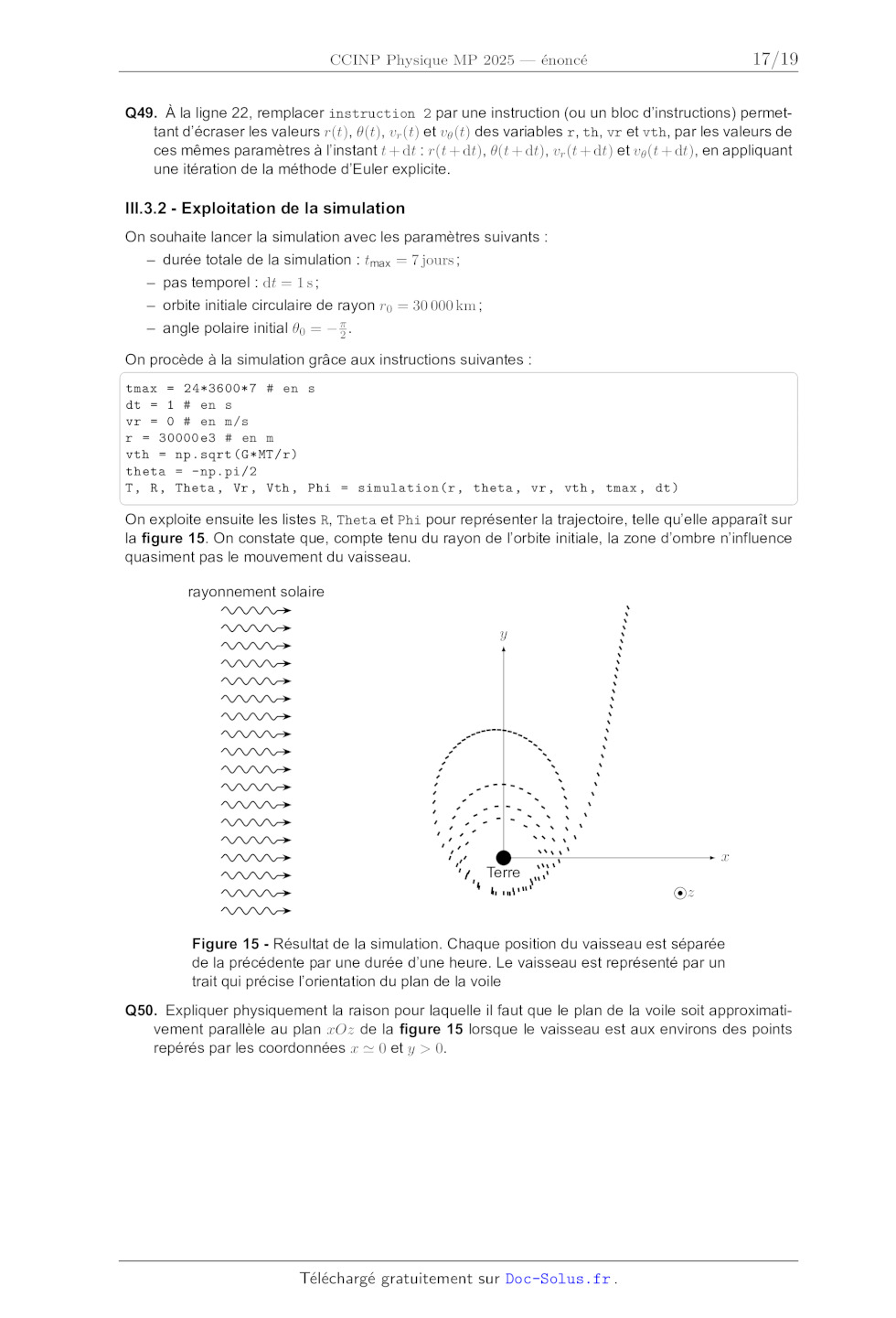
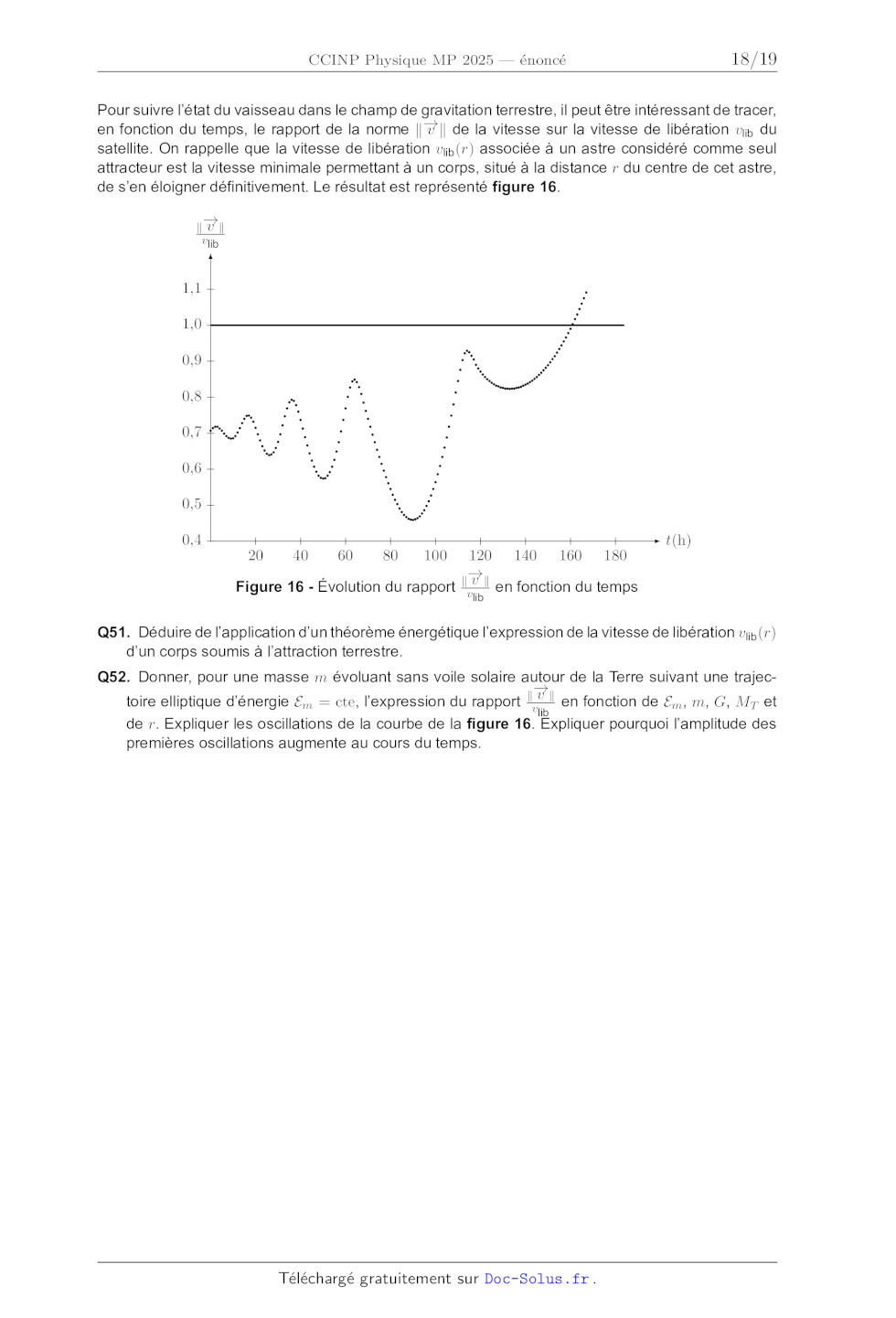
CCINP Physique MP 2025
| Thème de l'épreuve | La planète Terre |
| Principaux outils utilisés | mécanique du point, ondes électromagnétiques, électromagnétisme, Python |
| Mots clefs | satellite, Terre, océan, plasma, voile solaire |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)






Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
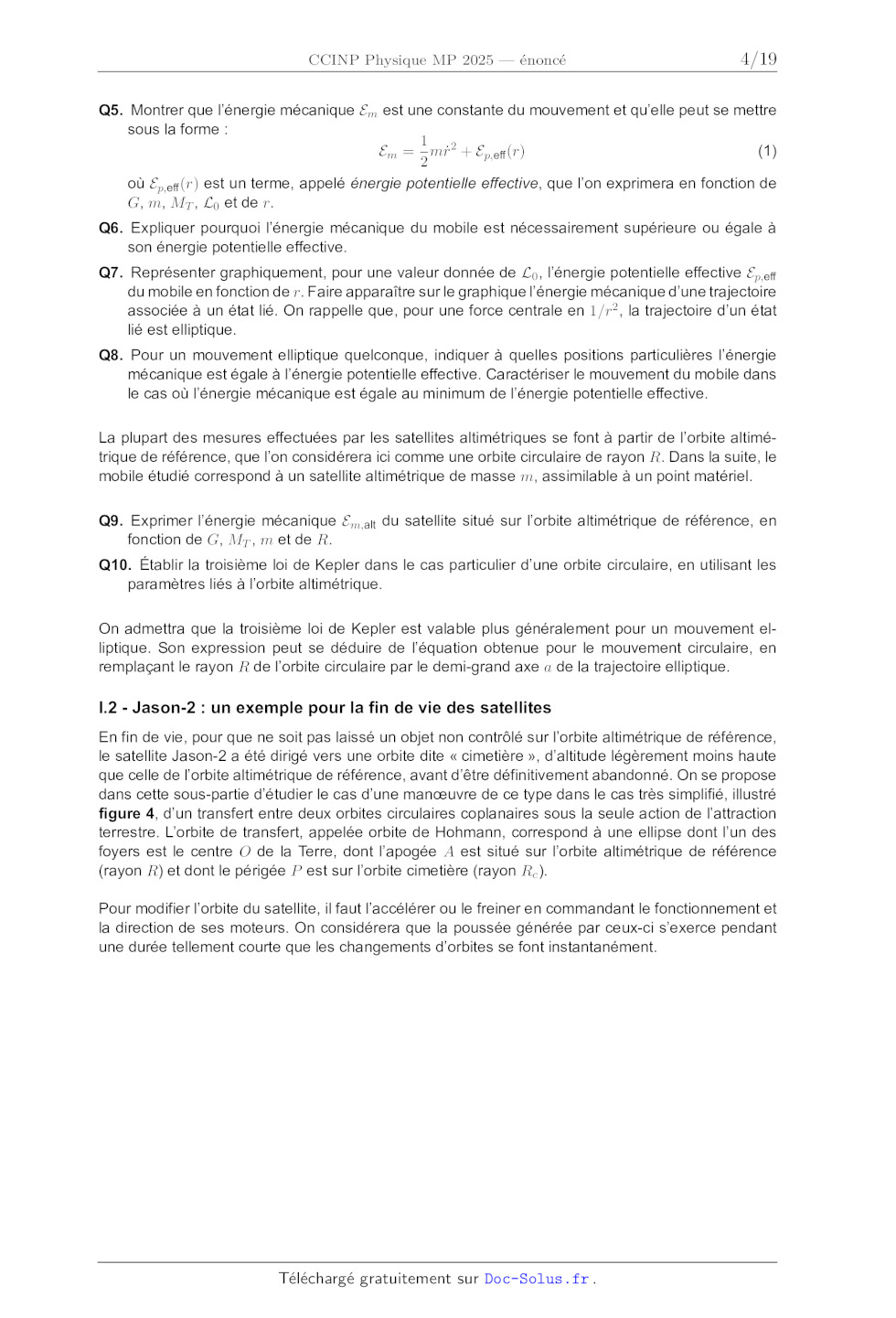
SESSION 2025 MP5P ÉPREUVE SPÉCIFIQUE - FILIÈRE MP ____________________ PHYSIQUE Durée : 4 heures ____________________ N.B. : le candidat attachera la plus grande importance à la clarté, à la précision et à la concision de la rédaction. Si un candidat est amené à repérer ce qui peut lui sembler être une erreur d'énoncé, il le signalera sur sa copie et devra poursuivre sa composition en expliquant les raisons des initiatives qu'il a été amené à prendre. RAPPEL DES CONSIGNES · · · Utiliser uniquement un stylo noir ou bleu foncé non effaçable pour la rédaction de votre composition ; d'autres couleurs, excepté le vert, bleu clair ou turquoise, peuvent être utilisées, mais exclusivement pour les schémas et la mise en évidence des résultats. Ne pas utiliser de correcteur. Écrire le mot FIN à la fin de votre composition. ______________________________________________________________________________ Les calculatrices sont interdites. Le sujet est composé de trois parties, toutes indépendantes. 1/19 La planète Terre Ce sujet évoque quelques considérations relatives à l'état de notre planète (figure 1) et au réchauffement qu'elle est en train de subir. De nombreux dispositifs sont dédiés à la compréhension et à la surveillance du changement climatique. Certains sont envoyés en orbite autour de la Terre pour procéder à des mesures depuis l'espace. Les satellites altimétriques permettent de surveiller la montée du niveau des océans causée par la fonte des glaces et la dilatation des eaux réchauffées. La première partie étudie le mouvement de ces satellites. La deuxième partie traite du dispositif de mesure en lui-même. Enfin, on s'intéresse dans la troisième partie à la propulsion d'un vaisseau qui, dans le cas où le changement climatique rendrait un jour la Terre invivable, pourrait servir à transporter une partie de l'humanité vers d'autres planètes habitables. Figure 1 - Image de la Terre prise par l'équipage de la mission Apollo 17 en 1972. Crédit : NASA À une grandeur physique évoluant sinusoïdalement avec le temps f (t) = A cos(t + ), on associera la grandeur complexe f (t) = Aei(t+) , dont la partie réelle s'identifie à la grandeur physique f (t) et où i est l'unité imaginaire, nombre complexe dont le carré vaut -1. Par commodité de représentation, les figures de l'énoncé ne respectent pas les échelles. Certaines données sont regroupées ci-dessous. Lorsqu'une application numérique est demandée, le candidat pourra se contenter d'exprimer le résultat avec un seul chiffre significatif. Données intensité de la pesanteur à la surface de la Terre : g = 9,8 m · s-2 charge élémentaire : e = 1,6 · 10-19 C masse de l'électron : me = 9,1 · 10-31 kg permittivité diélectrique du vide : 0 = 8,9 · 10-12 F · m-1 célérité des ondes électromagnétiques dans le vide : c = 3,0 · 108 m · s-1 . Formulaire Double produit vectoriel : - u (- v - w ) = (- u ·- w )- v - (- u ·- v )- w Sinus cardinal : sinc(x) sinc(x) = sin(x) x 1 0 2/19 x Partie I - Étude du mouvement d'un satellite Les systèmes d'observation des océans par satellite ont été imaginés et développés au début des années 70. Depuis, plus d'une quinzaine de satellites d'observation embarquant des altimètres radars ont été lancés dans le but d'observer le comportement des océans (figure 2). Issues d'une coopération du CNES et de la NASA, la série des satellites Topex-Poséidon, initiée en 1992, puis celle des satellites Jason, ont permis de mesurer l'élévation moyenne des mers avec précision : (3, 6 ± 0,1) mm/an durant ces trente dernières années. Figure 2 - Satellites altimétriques lancés depuis 1992. Vue d'artiste. Crédit : CNES On se propose dans cette partie d'étudier le mouvement d'un tel satellite, en orbite autour du centre O de la Terre, modélisée par un corps de répartition de masse à symétrie sphérique, de rayon RT et de masse MT . I.1 - Force centrale conservative On commence par étudier le mouvement d'un mobile quelconque, de masse m et assimilé à un point matériel M , dans le référentiel géocentrique (RT ) considéré comme galiléen. Le mobile n'est soumis qu'à la seule action de la Terre. Q1. Rappeler la définition du référentiel géocentrique et celle d'un référentiel galiléen. - Q2. Après avoir justifié la direction du champ de gravitation terrestre G (M ) et les invariances de sa norme, établir l'expression de celui-ci en un point M extérieur à la Terre en fonction de la constante de gravitation universelle G, de la masse MT , de la distance r = OM et du vecteur -- - unitaire - u = OM /r. En déduire l'expression Fg de la force de gravitation exercée par la Terre sur le mobile de masse m. - Q3. Montrer que le moment cinétique LO du mobile par rapport au point O est une constante du mouvement. En déduire que la trajectoire du mobile est plane. Dans la suite, on associera au référentiel - - e (RT ) le repère orthonormé (O, - x , ey , ez ) de - façon à ce que le moment cinétique LO soit - aligné avec - ez . On posera LO = L0 - ez et on se placera en coordonnées polaires (r, ), de centre O, pour décrire le mouvement du mobile (figure 3). Q4. Montrer que la force gravitationnelle s'exerçant sur le mobile dérive d'une énergie potentielle Ep . Établir l'expression de celle-ci en la prenant, par convention, nulle à l'infini. y - e - ez Terre - er M - ey O - e x x Figure 3 - Description du mouvement du mobile dans le système de coordonnées polaires 3/19 Q5. Montrer que l'énergie mécanique Em est une constante du mouvement et qu'elle peut se mettre sous la forme : 1 Em = mr2 + Ep,eff (r) (1) 2 où Ep,eff (r) est un terme, appelé énergie potentielle effective, que l'on exprimera en fonction de G, m, MT , L0 et de r. Q6. Expliquer pourquoi l'énergie mécanique du mobile est nécessairement supérieure ou égale à son énergie potentielle effective. Q7. Représenter graphiquement, pour une valeur donnée de L0 , l'énergie potentielle effective Ep,eff du mobile en fonction de r. Faire apparaître sur le graphique l'énergie mécanique d'une trajectoire associée à un état lié. On rappelle que, pour une force centrale en 1/r2 , la trajectoire d'un état lié est elliptique. Q8. Pour un mouvement elliptique quelconque, indiquer à quelles positions particulières l'énergie mécanique est égale à l'énergie potentielle effective. Caractériser le mouvement du mobile dans le cas où l'énergie mécanique est égale au minimum de l'énergie potentielle effective. La plupart des mesures effectuées par les satellites altimétriques se font à partir de l'orbite altimétrique de référence, que l'on considérera ici comme une orbite circulaire de rayon R. Dans la suite, le mobile étudié correspond à un satellite altimétrique de masse m, assimilable à un point matériel. Q9. Exprimer l'énergie mécanique Em,alt du satellite situé sur l'orbite altimétrique de référence, en fonction de G, MT , m et de R. Q10. Établir la troisième loi de Kepler dans le cas particulier d'une orbite circulaire, en utilisant les paramètres liés à l'orbite altimétrique. On admettra que la troisième loi de Kepler est valable plus généralement pour un mouvement elliptique. Son expression peut se déduire de l'équation obtenue pour le mouvement circulaire, en remplaçant le rayon R de l'orbite circulaire par le demi-grand axe a de la trajectoire elliptique. I.2 - Jason-2 : un exemple pour la fin de vie des satellites En fin de vie, pour que ne soit pas laissé un objet non contrôlé sur l'orbite altimétrique de référence, le satellite Jason-2 a été dirigé vers une orbite dite « cimetière », d'altitude légèrement moins haute que celle de l'orbite altimétrique de référence, avant d'être définitivement abandonné. On se propose dans cette sous-partie d'étudier le cas d'une manoeuvre de ce type dans le cas très simplifié, illustré figure 4, d'un transfert entre deux orbites circulaires coplanaires sous la seule action de l'attraction terrestre. L'orbite de transfert, appelée orbite de Hohmann, correspond à une ellipse dont l'un des foyers est le centre O de la Terre, dont l'apogée A est situé sur l'orbite altimétrique de référence (rayon R) et dont le périgée P est sur l'orbite cimetière (rayon Rc ). Pour modifier l'orbite du satellite, il faut l'accélérer ou le freiner en commandant le fonctionnement et la direction de ses moteurs. On considérera que la poussée générée par ceux-ci s'exerce pendant une durée tellement courte que les changements d'orbites se font instantanément. 4/19 orbite altimétrique de référence P orbite « cimetière » Terre A O orbite de transfert de Hohmann Figure 4 - Tracé des différentes orbites du satellite Q11. En utilisant l'équation (1), montrer que l'énergie mécanique Em,tr du satellite sur l'orbite de transfert peut se mettre sous la forme : GMT m . Em,tr = - R + Rc Q12. Exprimer la variation d'énergie mécanique Em = Em,tr - Em,alt nécessaire pour passer de l'orbite initiale à l'orbite de transfert. Commenter le signe de Em . Q13. En justifiant la réponse, indiquer s'il faut accélérer ou freiner le satellite pour le transférer en P de l'orbite de transfert à l'orbite cimetière. Partie II - Mesure du niveau des océans Les altimètres radars dédiés à l'observation de la Terre utilisent des techniques radars dites actives dont le principe est illustré figure 5 : le dispositif envoie lui-même une onde éléctromagnétique pour sonder son environnement et traite ensuite son écho pour analyser la surface ciblée. La mesure de la distance d entre le satellite et la surface ciblée permet de déterminer la hauteur du niveau des océans par rapport à une surface de référence (figure 5b). Cette surface correspond à une bonne approximation de la forme de la surface de la Terre. Ainsi, la hauteur du niveau de l'océan, ici notée hocéan , s'obtient en calculant la différence entre l'altitude h du satellite et la distance d séparant le satellite de la surface de l'océan : hocéan = h - d. (2) L'altitude h du satellite, définie par rapport à la surface de référence, est connue grâce à un récepteur GPS avec une précision meilleure que le centimètre. 5/19 Orbite d : distance séparant le satellite de la surface ciblée h : altitude du satellite Surface ciblée Océan hocéan : hauteur de l'océan Surface de référence (b) Le radar mesure la distance d le séparant de la surface ciblée (a) Principe. Vue d'artiste. Crédit : CNES Figure 5 - Illustration du principe d'une mesure radar active II.1 - Radar à impulsions Le type de radar utilisé pour mesurer la distance entre le satellite et l'océan est un radar à impulsions. Son principe de fonctionnement repose sur l'envoi d'une impulsion et la détection de l'écho produit en retour par la surface ciblée. La mesure de la durée entre l'émission d'une impulsion et la réception de son écho permet de connaître la distance d séparant le satellite de la surface ciblée. On considère dans cette sous-partie que les ondes électromagnétiques se propagent à la vitesse c dont la valeur est rappelée en début d'énoncé. II.1.1 - Onde sinusoïdale tronquée Considérons tout d'abord le cas simple d'une impulsion de durée constituée d'un signal sinusoïdal tronqué de fréquence f0 et d'amplitude réelle A0 (figure 6) : ß A0 pour - /2 t /2 e(t) = A(t) cos (2f0 t) avec A(t) = (3) 0 sinon. e(t) A0 t -A0 t = - /2 t=0 t = /2 Figure 6 - Signal sinusoïdal tronqué émis par le radar sous la forme d'une impulsion de durée . L'échelle temporelle du signal sinusoïdal n'est pas respectée : on a en réalité 1/f0 Comme représenté figure 7, le signal est amplifié avant son émission. L'écho qui revient vers le radar est une copie très atténuée du signal émis et retardée de la durée tR de l'aller-retour. Le signal reçu est ensuite amplifié afin de pouvoir être traité. On note le coefficient réel traduisant les différentes amplifications et atténuations des signaux. Dans la modélisation proposée, on ne tient pas compte 6/19 du bruit. Par ailleurs, on néglige la déformation des signaux due au phénomène de dispersion. Ainsi, on suppose que le signal reçu s'écrit : u(t) = e(t - tR ). Afin de pouvoir discriminer les différents échos provenant d'un même signal émis, on utilise un filtre adapté, qui calcule l'intercorrélation du signal reçu avec une réplique du signal émis (figure 7). On notera s(t) la sortie de ce filtre correspondant au signal u(t). Sa grandeur complexe associée s(t) se calcule grâce à l'expression : s(t) = - e ( - t)u()d où les grandeurs e et u représentent les grandeurs complexes associées respectivement aux signaux e et u et où e désigne la fonction complexe conjuguée de e. Générateur du signal d'émission e(t) e(t) Mesure de la distance d Amplificateur Amplificateur s(t) Filtre adapté u(t) Antenne Onde reçue Onde émise Figure 7 - Schéma simplifié de l'architecture de l'altimètre Q14. Montrer que, pour le signal u(t), la grandeur complexe s(t) associée à la sortie du filtre adapté peut se mettre sous la forme : + 2if0 (t-tR ) A( - t)A( - tR )d. s(t) = e - Q15. Représenter A( - t) et A( - tR ) en fonction de dans le cas tR - t tR . En déduire dans ce cas l'expression de s(t) en fonction de , A0 , f0 , tR , et de t. En considérant les trois autres cas t < tR - , tR t tR + et t > tR + , on montre que la grandeur complexe s(t) peut s'écrire : pour - t 0 t+ -t + pour 0 t s(t) = A20 e2if0 (t-tR ) (t - tR ) avec (t) = 0 sinon. On considère maintenant un deuxième écho, arrivant après une durée tR > tR , associé à la même impulsion émise mais dû à la présence d'une surface réfléchissante située à une distance d > d. Les deux échos pourront être distingués l'un de l'autre si les maxima des enveloppes qui leur correspondent dans le signal en sortie du filtre adapté sont séparés d'un temps au moins égal à la durée d'une impulsion. 7/19 Q16. Représenter, sans souci d'échelle, les signaux réels s(t) et s (t) associés aux signaux des deux échos reçus, en faisant apparaître les instants où chaque enveloppe atteint son maximum. Q17. Pour les satellites Jason, la durée d'une impulsion est 1,10 · 10-4 s. Déterminer numériquement le plus petit écart de distances dmin que permettrait de distinguer une impulsion telle que celle décrite par l'équation (3). Commenter. Pour gagner en précision, une première idée pourrait être de réduire significativement la durée de l'impulsion. Cependant, le bruit du signal, négligé dans la modélisation proposée, serait en pratique trop grand devant le signal utile. II.1.2 - Compression d'impulsion On va décrire ici une méthode permettant d'envoyer une impulsion suffisamment longue afin de réceptionner un signal dont le rapport signal sur bruit est suffisant, tout en permettant de détecter de faibles variations de distances. Cette méthode, appelée compression d'impulsion, utilise un signal modulé en fréquence. D'une manière générale, on peut écrire un signal modulé en fréquence sous la forme e(t) = A cos((t)) et définir sa fréquence instantanée fe (t) par la relation : fe (t) = 1 d(t) . 2 dt Dans le cas du radar à impulsion étudié, la modulation en fréquence se fait suivant une rampe, représentée figure 8. Le signal émis peut alors s'écrire, en notant la durée de l'impulsion et A0 l'amplitude réelle du signal et en introduisant une constante K : Å Å ãã ß K 2 A0 pour - /2 t /2 e(t) = A(t) cos 2 f0 t + t avec A(t) = (4) 0 sinon. 2 fe (t) e(t) A0 t -A0 - /2 t=0 - /2 /2 t /2 Figure 8 - Signal e(t) émis par le radar. À gauche : évolution du signal en fonction du temps (échelle temporelle non respectée). À droite : tracé de la fréquence instantanée au cours du temps Q18. Montrer que le signal décrit par l'équation (4) correspond bien à une fréquence variant linéairement avec le temps entre les instants - /2 et /2, en explicitant la fréquence centrale fc et la largeur B de la bande de fréquences. On montre que, dans le cas de ce signal, l'intercorrélation associée au signal reçu peut s'écrire approximativement : s(t) = A20 e2ifc (t-tR ) sinc (K (t - tR )) est la fonction sinus cardinal. où sinc(x) = sin(x) x 8/19 On considère que deux échos peuvent être distingués l'un de l'autre si le maximum du deuxième écho est séparé du maximum du premier écho d'une durée au moins égale au temps mis par le premier écho pour atteindre sa première annulation. Q19. Exprimer le plus petit écart dmin de distances discernables pour un tel signal en fonction de c et de B. Faire l'application numérique pour le cas des satellites Jason, sachant que la bande de fréquences utilisée dans ceux-ci est de largeur 320 MHz. Commenter. II.2 - Traversée de l'ionosphère La mesure de la distance entre le satellite et la surface des océans doit être corrigée des variations d'indice de l'ionosphère, qui joue un rôle crucial dans la transmission des ondes électromagnétiques. L'ionosphère est la partie de l'atmosphère terrestre située entre environ 80 km et 1 000 km d'altitude. Elle se caractérise par la présence d'un plasma fait de cations et d'électrons libres résultant de l'interaction entre le rayonnement solaire et les molécules de l'atmosphère. Pour simplifier, nous considérons que ce plasma est constitué d'électrons de masse me , de charge -e et de densité particulaire n d'une part et de cations de masse mc , de charge +e et de densité particulaire n d'autre part. Jusqu'à la question Q29 incluse, on suppose n uniforme et constante. On s'intéresse ici à la propagation d'une onde envoyée vers la surface d'un océan depuis un satellite - - situé à l'altitude h 1 366 km. On définit un repère orthonormé (O, - e x , ey , ez ) dont l'origine coïncide avec le centre du satellite et dont l'axe Oz est vertical descendant. Dans l'ionosphère, on cherche l'onde électromagnétique, produite à la fois par l'émetteur du radar et par les particules chargées du plasma, sous la forme d'une pseudo onde plane progressive harmonique, décrite en un point M (x, y, z) à l'instant t par le champ électrique complexe : - E (M, t) = E0 ei(t-k(z-z0 )) - e x avec la pulsation de l'onde, E0 l'amplitude réelle de l'onde à l'entrée dans l'ionosphère en z = z0 et k le nombre d'onde, éventuellement complexe. Dans le plasma, les particules chargées ne sont soumises qu'à la force de Lorentz associée à l'onde électromagnétique. On considérera par ailleurs que la vitesse des particules ne comporte pas de partie thermique fluctuante. Enfin, on admettra que l'ordre de grandeur du rapport des amplitudes du champ magnétique et du champ électrique dans le plasma est similaire à celui dans le vide. Q20. Identifier la direction de propagation éventuelle et la polarisation de l'onde. Q21. Déterminer la condition pour laquelle la composante magnétique de la force de Lorentz exercée par l'onde sur les charges peut être négligée devant la composante électrique. On supposera cette condition respectée dans la suite du sujet. Q22. En utilisant le principe fondamental de la dynamique appliqué à un électron puis à un cation, vc dont sont respectivement animés les élecexprimer en notation complexe les vitesses - ve et - - trons et les cations en régime sinusoïdal forcé, en fonction de e, , E (M, t) et de la masse me ou mc de la particule considérée. Q23. En utilisant le fait que la masse des cations est bien plus grande que celle des électrons, montrer à partir de la question précédente que la conductivité complexe () du plasma peut s'écrire de façon approchée : p2 () = -i0 où la grandeur p , appelée pulsation plasma, est à exprimer en fonction de n, e, 0 et de me . 9/19 Q24. Le plasma est localement neutre avant le passage de l'onde. Expliquer quelle caractéristique de l'onde électromagnétique permet d'écrire que la densité volumique de charge reste nulle même en présence de l'onde. Q25. Écrire les équations de Maxwell dans le plasma sous forme complexe. Montrer que la relation de dispersion peut s'écrire : 2 - p2 k2 = . (5) c2 On suppose la pulsation telle que < p . Q26. Donner l'expression de k en fonction de , p et de c, en justifiant soigneusement le choix de la - - solution de l'équation 5. Établir les expressions des champs réels E (M, t) et B (M, t), en faisant apparaître une distance caractéristique dont on donnera l'expression en fonction de , p et de c. Indiquer le nom donné à ce type d'onde. Q27. Déterminer la moyenne du vecteur de Poynting de cette onde. Commenter. On suppose désormais la pulsation telle que > p . - - Q28. Établir les expressions des champs réels E (M, t) et B (M, t) en fonction notamment de k dont on donnera l'expression, en justifiant soigneusement le choix de la solution de l'équation 5. Préciser quelle est la nature de l'onde. Q29. En déduire que le plasma se comporte comme un filtre pour la propagation des ondes électromagnétiques, en précisant sa nature et l'expression littérale de sa pulsation de coupure. Q31. Exprimer la vitesse de phase v et la vitesse de groupe vg en fonction de , p et de c. Représenter v /c et vg /c en fonction de . 103 altitude (km) Q30. Le profil de la densité particulaire, qui dépend de l'alternance des jours et des nuits, est représenté figure 9. En déduire le domaine de fréquences que l'on doit choisir pour que l'onde puisse atteindre la surface de l'océan. Commenter le choix de la bande de fréquences utilisée par les satellites Jason, sachant que celle-ci est caractérisée par une fréquence centrale f0 = 20 13,6 GHz et par une largeur B = 320 MHz. nuit jour 102 108 109 1010 1011 1012 n (m-3 ) Figure 9 - Densité particulaire n de l'ionosphère en fonction de l'altitude. Crédit : J. V. Evans and T. Hagfors, Radar Astronomy, 1968. McGraw-Hill Education Q32. Indiquer si l'ionosphère est dispersive pour les ondes électromagnétiques. Justifier. Du fait de la présence de l'ionosphère, il est nécessaire d'apporter une correction au calcul de la distance entre le satellite et la surface de l'océan. Les satellites altimétriques utilisent une deuxième impulsion, de fréquence centrale f1 = 21 5,3 GHz, en parallèle de la première impulsion de fréquence centrale f0 = 20 13,6 GHz. Pour la suite de l'énoncé, on considère l'ionosphère comme une couche d'épaisseur = 500 km et de densité d'électrons uniforme n = 5 · 1011 m-3 . La partie de l'atmosphère qui n'est pas l'ionosphère est assimilée au vide. 10/19 Q33. Les deux impulsions, associées aux fréquences centrales f0 et f1 , sont émises par le satellite à l'instant t = 0 et leurs échos sont détectés respectivement aux instants t0 et t1 . Déterminer une expression approchée du décalage temporel t = t1 - t0 en fonction de , c, p , 0 et de 1 . On pourra utiliser le développement limité en 0 : (1 + x) = 1 + x à l'ordre 1 en x. Q34. En déduire que la distance d entre le satellite et la surface de l'océan peut s'écrire approximativement : ct0 - d 2 où est un terme correctif, appelé correction ionosphérique, que l'on exprimera en fonction de c, t, 0 et de 1 . Q35. Déterminer, en fonction de , n, e, 0 , me et de 0 , l'erreur que l'on commettrait sur la mesure, faite à partir de l'impulsion de fréquence centrale f0 , si l'on considérait la vitesse de groupe égale à c. Faire l'application numérique et commenter la valeur obtenue. Partie III - Voile solaire Le changement climatique que la Terre est en train de subir risque de conduire à un déréglement irréversible de l'équilibre de vie actuel. Dans certaines oeuvres de science-fiction, l'ampleur du réchauffement est telle que la seule solution pour assurer la survie de l'humanité est l'exode spatial. Un vaisseau équipé d'une voile solaire figure parmi les solutions futuristes imaginées. Une voile solaire est un dispositif de propulsion spatiale qui utilise la pression du rayonnement solaire pour générer une force de poussée. Le procédé permettrait à un engin déjà placé en orbite de quitter l'attraction terrestre. Plusieurs prototypes de petite taille, destinés à mettre au point les systèmes de déploiement et de contrôle d'orientation particulièrement délicats, ont été placés en orbite, comme par exemple le NanoSail-D2, lancé par la NASA en 2019 et dont une vue Figure 10 - Voile solaire NanoSaild'artiste est représentée figure 10. D2. Vue d'artiste. Crédit : NASA On considère une voile solaire de surface carrée S = a2 modélisée par un conducteur parfait. Le rayonnement solaire est assimilé à une onde plane progressive harmonique (OPPH) de pulsation , e de polarisation rectiligne suivant - ez et se propageant selon - x depuis les x < 0. L'onde incidente, en un point M (x, y, z) et à l'instant t, s'écrit en notation complexe : - Ei (M, t) = E0 ei(t-kx) - ez - - où k = k = c est la pulsation spatiale de l'onde, norme du vecteur d'onde k et où E0 représente l'amplitude réelle de l'onde. - - On admet que les champs électrique E et magnétique B associés à une onde électromagnétique sont nuls dans un conducteur parfait. III.1 - Pression de radiation On suppose tout d'abord que la normale à la surface S est colinéaire à la direction de propagation de l'OPPH. Le référentiel d'étude est lié à la voile. Dans ce référentiel, la voile solaire se confond avec le plan x = 0, comme représenté figure 11. 11/19 voile solaire y - Ei x x z x=0 Figure 11 - Représentation de l'onde incidente arrivant en incidence normale sur la voile solaire On donne les relations de passage à l'interface entre deux milieux 1 et 2 , de normale - n 12 orientée de 1 vers 2 : - - - - - B2 - B1 = µ0 js - n E2 - E1 = - n12 12 0 - - - - où E1 , B1 , E2 et B2 désignent les champs électriques et magnétiques au voisinage immédiat de l'in- terface dans les milieux 1 et 2 et où et js sont les densités surfaciques de charge et de courant à l'interface, respectivement. Q36. La voile donne naissance à une onde réfléchie de même pulsation que celle de l'onde incidente. On cherche cette onde réfléchie sous la forme d'une OPPH se propageant en sens inverse de l'onde incidente et de polarisation transverse a priori quelconque : - E (M, t) = E ei(t+kx) - e + E ei(t+kx) - e . r 0y 0z y z En utilisant la relation de passage relative au champ électrique, simplifier l'expression du champ électrique complexe de l'onde réfléchie. Q37. Après avoir déterminé le champ magnétique complexe total régnant au voisinage extérieur de la surface de la voile (en x = 0- ), établir l'expression de la densité surfacique de courant réelle - js (t) qui apparaît sur celle-ci. dy On s'intéresse, dans la suite, à la force électromagnétique exercée par l'onde sur la voile. On admet que cette force est égale, dans ce cas d'étude particulier, à la force de Laplace exercée sur les courants surfaciques par la moitié du champ magnétique total régnant au voisinage extérieur de la surface de la voile (en x = 0- ). i a z On définit le scalaire js par la relation : y - js = js - ez . x On considère un élément de la voile rectiligne, représenté en grisé sur la figure 12, de longueur a, de largeur dy et parcouru par un courant d'intensité i = js dy orienté vers les z > 0. 12/19 a Figure 12 - Représentation d'un élément de la voile rectiligne, parcouru par un courant d'intensité i -- Q38. Exprimer la force électromagnétique FL due au champ électromagnétique sur cette portion - rectiligne en fonction de a, dy, js (t) et du champ magnétique incident à la surface de la voile - - Bi (x = 0, t). En déduire la force électromagnétique totale FL exercée sur l'ensemble de la voile - - en fonction de a, js (t) et de Bi (x = 0, t). ¨- Q39. En déduire la force électromagnétique surfacique moyennée temporellement f et montrer qu'elle peut s'écrire de la façon suivante : ¨- f = Pm - e x où Pm est une grandeur, appelée pression de radiation, que l'on exprimera en fonction de l'intensité I de l'onde incidente (puissance surfacique transportée à travers une section droite, moyennée temporellement) et de la célérité c de la lumière dans le vide. Q40. Évaluer l'ordre de grandeur de la surface S nécessaire pour donner à un vaisseau de masse m = 2 000 kg une accélération environ égale au millième de l'intensité de la pesanteur g régnant à la surface de la Terre, sachant que l'intensité du rayonnement solaire à proximité de la Terre est d'environ 1 000 W · m-2 . Commenter. y Dans le cas plus général d'une inclinaison quelconque de la voile (figure 13), on peut montrer que la force électromagnétique surfacique moyen¨- née temporellement f peut se mettre sous la forme : ¨- f = Pm cos2 () - n (6) y voile solaire x z + - n - Ei x x où est l'angle caractérisant l'inclinaison par rap port à l'axe Ox du vecteur unitaire - n normal à la voile. Figure 13 - Représentation de la réflexion d'une onde arrivant avec un angle d'incidence quelconque sur la voile III.2 - Libération du vaisseau III.2.1 - Position du problème On va chercher dans cette sous-partie à étudier une manoeuvre permettant à un vaisseau, assimilable à un point matériel M et parcourant initialement une orbite circulaire autour de la Terre, d'atteindre grâce à une voile solaire la vitesse de libération et "d'échapper ainsi à l'attraction terrestre". Pour simplifier l'étude, on considérera l'orbite initiale dans le plan de l'écliptique, qui est le plan de l'orbite du centre de la Terre autour du Soleil et que l'ensemble de la trajectoire restera contenue dans ce plan. On décrira le mouvement dans le système de coordonnées polaires, dans le plan de l'écliptique, caractérisé par les paramètres r = OM et , l'angle entre l'axe Ox, aligné avec la direction du rayon nement solaire et la direction radiale portée par - er (figure 14). Comme l'étude du mouvement du vaisseau ne va durer que quelques jours, on peut négliger le mouvement de la Terre autour du Soleil et considérer le référentiel géocentrique d'étude comme galiléen. 13/19 y rayonnement solaire - e + - n - t M - er r x O Terre ombre de la Terre Figure 14 - L'orientation de la voile est repérée par l'angle que fait le vecteur - unitaire - n normal à la voile avec la direction radiale. Le vecteur t est le vecteur - unitaire tangent à la voile tel que (- n , t ,- ez ) forme un trièdre direct droit - Grâce à la présence de sa voile, le vaisseau va subir la force Fp de pression de radiation exercée par le rayonnement solaire dont la valeur surfacique a été décrite à la sous-partie III.1. En raison du passage du vaisseau dans l'ombre de la Terre, on introduit une fonction L(r, ) qui rend compte de la présence ou non du rayonnement solaire sur la voile : ß ¨- - 0 si M est dans l'ombre de la Terre - 2 Fp = L(r, ) f S = L(r, )Pm S cos () n avec L(r, ) = 1 sinon et où l'angle sera à tout instant compris entre -/2 et /2. Q41. Donner les expressions en coordonnées polaires du vecteur position - r , du vecteur vitesse - v - et du vecteur accélération a du point matériel M qui modélise le vaisseau. Q42. En considérant la Terre comme un corps de répartition de masse à symétrie sphérique, déterminer les composantes radiale Fr et orthoradiale F de la résultante des forces extérieures s'appliquant sur le vaisseau en fonction de la constante de gravitation universelle G, de la masse MT de la Terre, de la masse m du vaisseau, de la fonction L(r, ) et des grandeurs r, , Pm , S et . On note dans la suite vr et v les composantes radiale et orthoradiale du vecteur vitesse : - er + v - e . v = vr - Q43. Montrer que les dérivées temporelles vr et v peuvent s'écrire : vr = v2 Fr + m r et v = vr v F - . m r III.2.2 - Énergie et manoeuvre optimale On cherche à optimiser la manoeuvre du vaisseau en ajustant l'orientation de la voile pour que la force de pression de radiation permette à chaque instant d'augmenter le plus possible l'énergie mécanique du vaisseau. 14/19 Q44. Donner l'expression de l'énergie mécanique Em du vaisseau en fonction de G, MT , m, r, vr et de v . Q45. Montrer que la dérivée temporelle de l'énergie mécanique peut se mettre sous la forme : dEm = Km L(r, ) cos2 () (vr cos( - ) + v sin( - )) dt où Km est une constante que l'on exprimera en fonction de Pm et de S. III.3 - Simulation numérique du mouvement du vaisseau Seul le langage Python est autorisé dans cette sous-partie de simulation numérique. On suppose que le module numpy a été importé grâce à l'instruction : import numpy as np Le candidat pourra à tout moment supposer qu'une fonction ou une instruction définie dans une question précédente est disponible, même s'il n'a pas traité la question correspondante. Une documentation relative au module numpy est fournie en annexe à la fin du sujet. Dans l'énoncé, une même grandeur peut être écrite suivant le contexte dans deux polices de caractères différentes : une police en italique pour représenter une grandeur physique ou mathématique (par exemple : dt) et une police de type machine pour définir son équivalent dans le code informatique (par exemple : dt). Pour la résolution numérique, on définit de manière globale en début de programme les variables répertoriées dans le tableau 1. Elles pourront être utilisées directement dans la suite. instruction grandeur correspondante G = 6.67e-11 # en N.m2/kg2 G : constante de la gravitation universelle MT = 5.98e24 # en kg MT : masse de la Terre RT = 6.37e6 # en m RT : rayon de la Terre supposée sphérique m = 2.0e3 # en kg m : masse du vaisseau g = 9.8 # en N/kg g : intensité de la pesanteur à la surface de la Terre Km = g/1000*m Km : constante apparaissant dans la question Q45 Tableau 1 - Variables définies de manière globale en début de programme 15/19 III.3.1 - Résolution numérique On propose la fonction suivante, incomplète : 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 def simulation (r, theta , vr , vtheta , tmax , dt) : """ Calcule itérativement , par la mé thode d'Euler explicite , la position et la vitesse du vaisseau ainsi que l' orientation de la voile réglée de manière optimale au cours du temps . Entrées : - r ( float ) : distance initiale entre le vaisseau et le centre de la Terre (en m) ; - theta (float ) : angle polaire initial (en radians ) ; - vr ( float ) : vitesse radiale initale (en m/s) ; - vtheta ( float ) : vitesse orthoradiale initiale (en m/s) ; - tmax ( float ) : durée de la simulation (en s) ; - dt ( float ) : pas temporel de la simulation (en s). Sortie : - R ([ float ]) : liste de la distance entre le centre de la Terre et le vaisseau aux diffé rentes instants (en m) ; - Theta ([ float ]) : liste de l' angle polaire aux diffé rents instants (en radians ) ; - Vr ([ float ]) : liste de la vitesse radiale aux diffé rents instants (en m/s) ; - Vtheta ([ float ]) : liste de la vitesse orthoradiale aux diffé rents instants (en m/s) ; - Phi ([ float ]) : liste de l' angle phi optimal aux diffé rents instants (en radians ). """ instruction 1 R, Theta , Vr , Vtheta , Phi = [], [], [], [], [] for t in T : phi = recherche_phi_optimal (vr , vth , theta ) vr_pt , vth_pt = derivees_comp_vitesse (r, theta , vr , vth , phi) instruction 2 R. append (r) Theta . append ( theta ) Vr. append (vr) Vth. append (vth) Phi. append (phi) return T, R, Theta , Vr , Vth , Phi Q46. À la ligne 17, proposer une instruction à la place de instruction 1 permettant de définir le tableau numpy T contenant n valeurs de t, séparées par le pas de temps constant dt et comprises entre 0 (inclus) et tmax (exclu). Q47. Pour une vitesse et une position du vaisseau données, il existe un unique angle compris entre - 2 et 2 permettant de maximiser le taux de variation temporelle de l'énergie mécanique, comme décrit dans la sous-partie III.2.2. Écrire la fonction recherche_phi_optimal(vr, vth, theta) permettant, pour une vitesse radiale vr , une vitesse orthoradiale v et un angle polaire , de déterminer cet angle optimal à 2 · 10-3 rad près. On pourra se contenter d'un algorithme naïf de recherche d'un maximum, fonctionnant avec une complexité temporelle linéaire. Q48. Écrire une fonction derivees_comp_vitesse(r, theta, vr, vth, phi), permettant, à partir des paramètres r, , vr , v et , de calculer les dérivées temporelles vr et v des composantes radiale et orthoradiale de la vitesse, suivant les résultats obtenus aux questions Q42 et Q43. Il est demandé de tenir compte des passages du vaisseau dans l'ombre de la Terre. 16/19 Q49. À la ligne 22, remplacer instruction 2 par une instruction (ou un bloc d'instructions) permettant d'écraser les valeurs r(t), (t), vr (t) et v (t) des variables r, th, vr et vth, par les valeurs de ces mêmes paramètres à l'instant t + dt : r(t + dt), (t + dt), vr (t + dt) et v (t + dt), en appliquant une itération de la méthode d'Euler explicite. III.3.2 - Exploitation de la simulation On souhaite lancer la simulation avec les paramètres suivants : durée totale de la simulation : tmax = 7 jours pas temporel : dt = 1 s orbite initiale circulaire de rayon r0 = 30 000 km angle polaire initial 0 = - 2 . tmax = 24*3600*7 # en s dt = 1 # en s vr = 0 # en m/s r = 30000 e3 # en m vth = np.sqrt(G*MT/r) theta = -np.pi /2 T, R, Theta , Vr , Vth , Phi = simulation (r, theta , vr , vth , tmax , dt) On procède à la simulation grâce aux instructions suivantes : On exploite ensuite les listes R, Theta et Phi pour représenter la trajectoire, telle qu'elle apparaît sur la figure 15. On constate que, compte tenu du rayon de l'orbite initiale, la zone d'ombre n'influence quasiment pas le mouvement du vaisseau. rayonnement solaire y x Terre z Figure 15 - Résultat de la simulation. Chaque position du vaisseau est séparée de la précédente par une durée d'une heure. Le vaisseau est représenté par un trait qui précise l'orientation du plan de la voile Q50. Expliquer physiquement la raison pour laquelle il faut que le plan de la voile soit approximativement parallèle au plan xOz de la figure 15 lorsque le vaisseau est aux environs des points repérés par les coordonnées x 0 et y > 0. 17/19 Pour suivre l'état du vaisseau dans le champ de gravitation terrestre, il peut être intéressant de tracer, en fonction du temps, le rapport de la norme - v de la vitesse sur la vitesse de libération vlib du satellite. On rappelle que la vitesse de libération vlib (r) associée à un astre considéré comme seul attracteur est la vitesse minimale permettant à un corps, situé à la distance r du centre de cet astre, de s'en éloigner définitivement. Le résultat est représenté figure 16. - v vlib 1,1 1,0 0,9 0,8 0,7 0,6 0,5 0,4 20 40 60 80 100 Figure 16 - Évolution du rapport 120 - v vlib 140 160 180 t(h) en fonction du temps Q51. Déduire de l'application d'un théorème énergétique l'expression de la vitesse de libération vlib (r) d'un corps soumis à l'attraction terrestre. Q52. Donner, pour une masse m évoluant sans voile solaire autour de la Terre suivant une trajec- toire elliptique d'énergie E = cte, l'expression du rapport v en fonction de E , m, G, M et m vlib m T de r. Expliquer les oscillations de la courbe de la figure 16. Expliquer pourquoi l'amplitude des premières oscillations augmente au cours du temps. 18/19 Annexe - Aide relative à l'utilisation du module numpy np.array(u) crée un tableau numpy (N-dimensional array) contenant les éléments de la liste u. La taille et le type des éléments de ce tableau sont déduits du contenu de u : >>> u = [1, 2, 3] >>> np.array (u) array ([1, 2, 3]) >>> np. arange (0.5 , 1.6 , 0.1) array ([0.5 , 0.6 , 0.7 , 0.8 , 0.9 , 1. , 1.1 , 1.2 , 1.3 , 1.4 , 1.5]) >>> np. linspace (0.5 , 1.5 , 11) array ([0.5 , 0.6 , 0.7 , 0.8 , 0.9 , 1. , 1.1 , 1.2 , 1.3 , 1.4 , 1.5]) np.arange(a,b,p) crée un tableau numpy de flottants contenant les valeurs comprises entre a (inclus) et b (exclu), régulièrement espacées du pas p : np.linspace(a,b,n) crée un tableau numpy de flottants contenant n valeurs régulièrement espacées et comprises entre a (inclus) et b (inclus) : np.sqrt(x) calcule la racine carrée du nombre x np.cos(x) et np.sin(x) renvoient le cosinus et le sinus de l'angle x exprimé en radians np.arccos(x) et np.arcsin(x) renvoient l'arc cosinus et l'arc sinus du réel x compris entre -1 et 1 Les opérations élémentaires (*, +, /, -, %, etc) et les fonctions de calcul du module numpy, telles que cos ou sqrt par exemple, peuvent s'appliquer sur des tableaux numpy. Le résultat renvoyé est un tableau de même dimension que le tableau utilisé : >>> 100+2* np.array ([18 ,6 ,40]) array ([136 , 112 , 180]) >>> np.cos(np. array ([0 , np.pi/2,np.pi ])) array ([ 1.000000 e+00 , 6.123234e -17 , -1.000000e +00]) >>> np.array ([1 ,2 ,3])+np. array ([10 ,20 ,30]) array ([11 , 22, 33]) Il est possible de manipuler membre à membre plusieurs tableaux numpy de même dimension : FIN 19/19