
CCINP Maths 2 MP 2007
| Thème de l'épreuve | Groupes d'isométries sur ℝn |
| Principaux outils utilisés | espaces vectoriels normés, produit scalaire, dimension finie |
| Mots clefs | norme, norme euclidienne, espace euclidien, dualité, isométrie, groupe |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - -

Énoncé complet
(télécharger le PDF)




Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
SESSION 2007
);
EDHEÜLIRE EÜH"IU"«I'E PÛLVTEEHHIÛUE5--
EPREUVE SPEClFIQUE -- FILIERE MP
MATHEMATIQUES 2
Durée : 4 heures
Les calculatrices sont autorisées.
>l<>l<>l< NB : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision de la rédaction. Si un candidat est amené à repérer ce qui peut lui sembler être une erreur d'énoncé, il le signalera sur sa copie et devra poursuivre sa composition en expliquant les raisons des initiatives qu'il a été amené à prendre. >l<>l<>l< Groupes d'isométries sur IR" Notations Dans ce sujet, n est un entier naturel supérieur ou égal à 2 et on note : E l'espace vectoriel IR" et B = (al,...,cn) sa base canonique <-,-> le produit scalaire canonique sur E: si x=(xl,...,xn) et y=(yl,...,yn)
sont deux
vecteurs de E, on a < x, y > = ( XY = ZxÏyi où)( et Y sont les matrices
colonnes des vecteurs x et
i=l
y dans la base 8 (B est donc une base orthonormale pour < - , - >)
L' (E ) la lR-algèbre des endomorphismes de E
(GL(E),o) le groupe des automorphismes de E
M "51 (IR) le lR-espace vectoriel des matrices à n lignes et une colonne
M " (IR) la lR-algèbre des matrices carrées réelles de taille n
GLn (IR) le groupe des matrices inversibles de M " (IR)
pour une matrice A de M " (IR) , t A est sa matrice transposée
O (IR) le groupe des matrices orthogonales, c'est-à-dire des matrices A de M "
(IR) vérifiant
l'l
IAA = In où In est la matrice unité de M " (IR)
1/6
Sn++(IR) l'ensemble des matrices symétriques définies positives de Mn (IR),
c'est-à-dire des
matrices A de Sn (IR) vérifiant : pour toute matrice X EUR Mn,1 (IR) non nulle,
')Ç4X > 0.
Si x1,x2,...,xn sont des réels, on note diag(xl,x2,...,xn) la matrice diagonale
de M " (IR) qui admet
pour coefficients diagonaux les réels x1,x2,...,xn dans cet ordre
Si p est un réel supérieur ou égal à l, on note H - "p la norme p sur E :
si x=(xl,...,xn)EURE, x
xu.=(â ")-
l
xH=müxt
(X) Z
lSiSn
On note || - "oe la norme infinie sur E : si x = (XI,...,xn) EUR E,
Une norme N sur E est dite euclidienne s'il existe un produit scalaire ça sur E
tel que pour tout
XEE, N(x) =./ç0(x,x).
Objectifs
Si N est une norme sur E, on dit qu'un endomorphisme u EUR L' (E ) est une
N--isométrie si pour tout
XEE, N(u(x))=N(x).
On note lsom(N ) l'ensemble des N--isométries.
L'objectif du problème est de déterminer le nombre d'éléments de lsom(N ) dans
le cas des normes
euclidiennes puis des normes p.
1. Description des normes euclidiennes
1. Identité du parallélogramme
a. Montrer que si N est une norme euclidienne alors elle vérifie l'identité du
parallélogramme,
c'est-à-dire pour tous vecteurs x et y de E, on a
(N(x+y))2 +(N(x--y))2 = 2{(N(x))2 + (N(y))Î .
En déduire que la norme || - "oe n'est pas euclidienne.
b. Justifier que la norme " - "2 est euclidienne puis montrer que pour p = 2,
la norme || - "p n'est
pas euclidienne.
2. Soit 5 EUR Sf(lR) .
xl Yi
) et y=(yl,...,yn) sont deux vecteurs de E, on note X= 3 et Y= 3 les
xïl yïl
matrices colonnes associées. Montrer que si l'on pose < x, y > S= 'XSY , alors
<-,->S définit un
Si x = (XI,...,X
n
produit scalaire sur E.
2/6
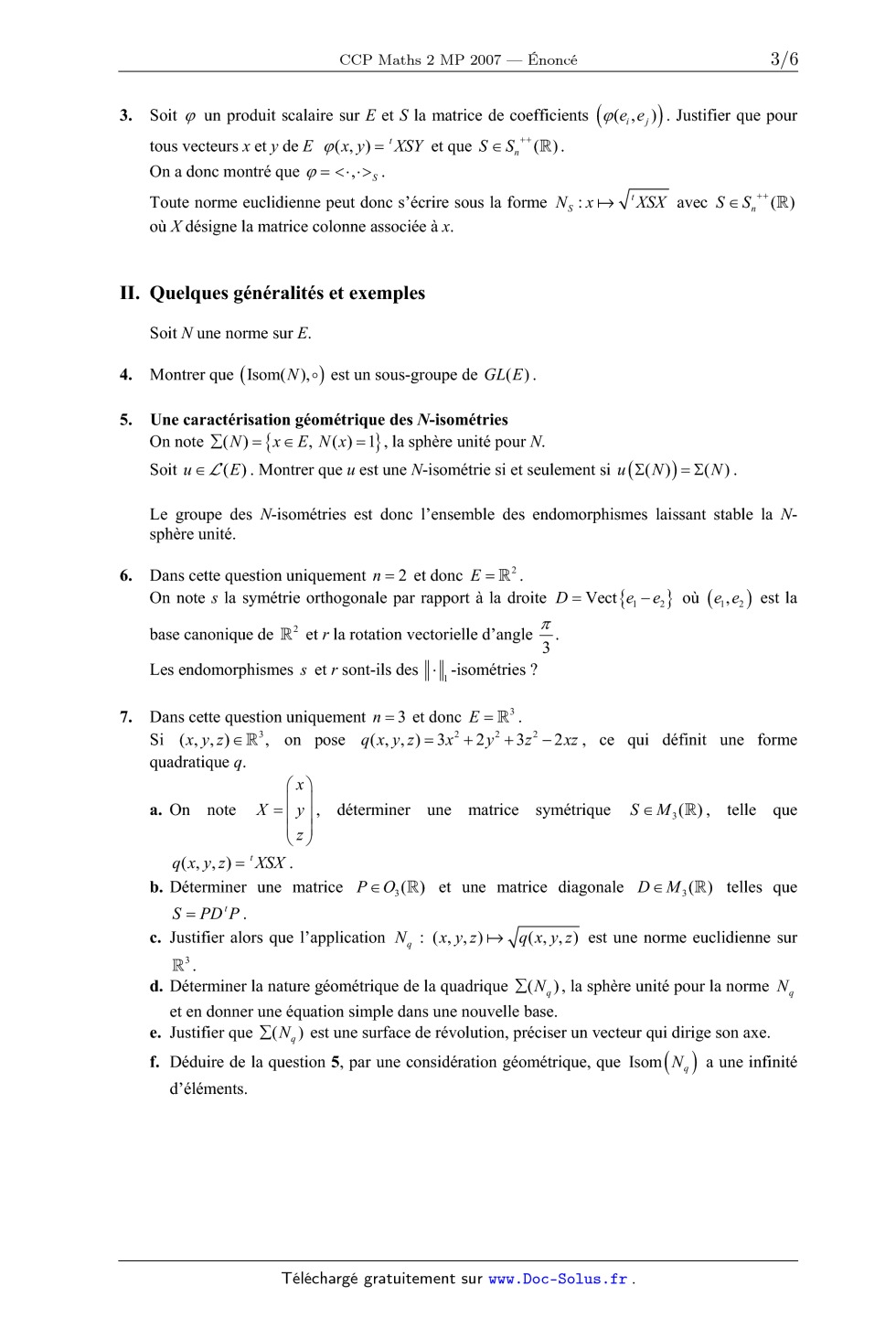
11.
Soit ça un produit scalaire sur E et S la matrice de coefficients (ça(e,,ej)).
Justifier que pour
tous vecteurs x et y de E ça(x, y) = [ XS Y et que S EUR Sn++ (R).
On a donc montre que ça= <-,->S.
Toute norme euclidienne peut donc s'écrire sous la forme N S :x H \/ 'XSX avec
S EUR Sn++ (R)
oùX désigne la matrice colonne associée à x.
Quelques généralités et exemples
Soit N une norme sur E.
Montrer que (Isom(N ), 0) est un sous-groupe de GL(E ) .
Une caractérisation géométrique des N--isométries
On note Z(N) = {x EUR E, N(x) = l} , la sphère unité pour N.
Soit u EUR L' (E ) . Montrer que u est une N--isométrie si et seulement si u
(E(N )) = E(N ) .
Le groupe des N--isométries est donc l'ensemble des endomorphismes laissant
stable la N--
sphère unité
Dans cette question uniquement n = 2 et donc E = R2 .
On note 3 la symétrie orthogonale par rapport à la droite D = Vect{e1 --e,} où
(61,62) est la
base canonique de R2 et r la rotation vectorielle d'angle ?.
Les endomorphismes s et r sont--ils des H - H1-isométries '?
Dans cette question uniquement n = 3 et donc E = R3 .
Si (x, y,z) EUR R3 , on pose q(x, y,z) = 3x2 + 2 y2 +322 --2xz , ce qui définit
une forme
quadratique q.
x
a. On note X = y , déterminer une matrice symétrique S EURM 3 (R) , telle que
2
q(x,y,z) = 'XSX.
b. Déterminer une matrice PEURQ(R) et une matrice diagonale DEURM3(R) telles que
S = PDÎP .
c. Justifier alors que l'application N q : (x, y, 2) H ,/q(x, y,z) est une
norme euclidienne sur
R3 .
(1. Déterminer la nature géométrique de la quadrique Z(Nq) , la sphère unité
pour la norme N q
et en donner une équation simple dans une nouvelle base.
e. Justifier que Z(Nq) est une surface de révolution, préciser un vecteur qui
dirige son axe.
f. Déduire de la question 5, par une considération géométrique, que Isom(Nq) a
une infinité
d'éléments.
3/6
Ill.Étude de Isom(N) lorsque N est une norme euclidienne
10.
11.
Si u EUR £(E) , on note [u]B la matrice de u dans la base 8 .
Si N est une norme, on note ISOM(N) = {[u]B , u EUR lsom(N)} . L'ensemble
ISOM(N) est par
construction un groupe isomorphe à lsom(N ) , c'est << sa version matricielle >>.
Caractérisation matricielle des isométries euclidiennes
a. Soit S EUR Sn++ (R), N S la norme euclidienne associée et <-,->S le produit
scalaire associé.
Soit u EUR L' (E ) .
Montrer que u est une N S -isométrie si et seulement si pour tous vecteurs x et
y de E, on a
S=< x,y >S.
b. En déduire que u est une N S -isométrie si et seulement si sa matrice A dans
B vérifie
'ASA = S .
Reconnaître alors ISOM(H - H2). Que peut-on dire du nombre d'éléments de ISOM(H
- H2) ?
Justifier votre réponse.
Une application des polynômes interpolateurs
R,[X ] désigne le ]R -espace vectoriel des polynômes à coefficients réels de
degré inférieur ou
égal à r.
On se donne r+l réels x0 < x1 < ...< xr . On considère l'application linéaire u de RÏ[X ] vers R... définie par PH (P(xO),P(xl),...,P(x,)). a. Déterminer le noyau de u . En déduire que pour tous réels y0,y1,...,yr , il existe un unique polynôme L de R,[X ] tel que pour tout i EUR {O,...,r}, L(x,) = y, (un tel polynôme est appelé polynôme interpolateur). b. Application : soit n un entier naturel non nul et u1,...,un des réels strictement positifs, on pose U = diag(ul,...,un) et V = diag(Æ ,...,Æ ). Montrer qu'il existe un polynôme L, à coefficients réels, tel que V = L(U ) . Racine carrée dans Sn++ (R) a. Soit S EUR Sn++ (R). Déterminer une matrice A EUR Sn++ (IR) telle que A2 = S . On dit que A est une racine carrée de S. b. Soit E EURSn++(R) une autre racine carrée de S. Montrer qu'il existe un polynôme Q, à coefficients réels, tel que A = Q(B) . En déduire que A et B commutent. c. Montrer que la somme de deux matrices symétriques définies positives est une matrice inversible. d. Déduire des questions précédentes que A = B (on pourra calculer (A + B ) (A -- B ) ). Désormais, on note \/S l'unique racine carrée dans Sn++ (IR) de S. 4/6 12. Étude du groupe d'isométrie pour une norme euclidienne Soit N une norme euclidienne. Il existe donc une matrice S EUR Sn++ (IR) telle que pour tout x EUR E, N (x) = N S (x) = \/ ' XSX où)( est le vecteur colonne associée à x. a. Montrer que si M EUR Un (R) , la matrice (\/Ê )_1M \/Ê appartient à ISOM (N S) . --1 b. Montrer que l'application l// de On (R) dans ISOM(NS) définie par M H (\/E) M x/Ê est une bij ection. Le groupe d'isométrie d'une norme euclidienne est--il fini? 1v. Étude du cardinal de Isom(p) Dans cette partie p est un réel strictement supérieur à 1, on appelle exposant conjugué de p . 1 1 l'umque réel q tel que -- + -- = 1. P q Pour alléger l'écriture, une p-isométrie désigne une isométrie pour la norme H - Hp et on note lsom( p) le groupe des p-isométries. Si uEUR£(E), u* désigne l'adjoint de u pour <-,->. On rappelle que u*EUR£(E),
est
caractérisé par l'égalité suivante : pour tout (x, y) EUR E 2 , < u(x), y >=< x,u * (y) >.
13. Endomorphismes de permutation signée
77n désigne le groupe des permutations de l'ensemble {l,2,...,n} .
Soit 0 EUR 73" et g =(£1,...,£n) EUR {--1,+1}" . On note uw l'endomorphisme de
E qui vérifie pour
tout i EUR {1, 2,...,n} , uw (e,) = ('à-%...-
a. Montrer que uw est une p-1sometr1e.
, 1 2 3 4
b. Ecrire la matrice de uw dans la base canonique dans le cas où n = 4 , a = (3
4 1 2) et
g=(1,1,--1,1).
14. Inégalité de Holdër
, . . 1 1 . .
a. Montrer que pour tous réels a et b pos1t1fs ou nuls, on a ab £ --ap + --bq .
On pourra ut1hser
P q
la fonction logarithme népérien.
b. En déduire que pour tous vecteurs x et y de E, on a \< x, y >\ S Hpr Hqu .
Ce résultat s'appelle
l'inégalité de Holdër (on pourra d'abord démontrer l'inégalité lorsque Hpr =
Hqu = 1 ).
c. Que devient l'inégalité si p = 2 ?
Dans toute la suite, u désigne une p-isométrie. On note (al.].) les
coefficients de la matrice A = [u] 5 .
15. Montrer que pour toutj EUR{1,2,..., n} , Î aÿ.|p = 1. En déduire la valeur
de ÎÎ p .
i=1 j=1 i=1
%--
5/6
16. Une formule clé de dualité
Soit er. Onnote2q ={zeE,
Z", = 1} .
a. Justifier l'existence du réel max \< x, y >\ .
yezq
b. Justifier que ry1g>q<\< x,y >\ $ Hx||p .
Soit ie {l,2,...,n} ; si x, = 0 , on pose y, = 8, x, p_1||pr1_p où 8, désigne
le signe de x, et si
x, = 0 , on pose y, = 0. On définit ainsi un vecteur y = (yl,...,yn ).
Montrer que \< x,y >| = HxH puis montrer l'égalité suivante : HxH = maxl< x,y >\ .
p p yezq
17. En déduire que si u est une p-isométrie, u * est une q-isométrie. Donner
alors, en justifiant, la
18.
19.
ïl ïl
q
valeur de z z |aJ,
j=l i=l
On suppose de plus que p = 2 .
l" l"
a. Soient al,a2,...,ar des réels dans [0,1] vérifiant Za,f =Za,fl . Montrer
avec soin que
k=l k=l
pour tout k EUR {l, 2, ..., r} , ak ne prend qu'un nombre fini de valeurs à
déterminer.
a... ne peut prendre que 2 valeurs
U
b. En déduire que pour tout i et j dans {l,2,...,n},
différentes que l'on précisera (on rappelle que les %-- sont les coefficients
de la matrice
d'une p-isométrie).
Conclusion
Montrer alors que lorsque p = 2 , lsom( p) est un groupe fini dont on
déterminera le cardinal.
On remarquera en particulier que ce cardinal est indépendant de p.
Commentaire : Les p-isométries pour p = 2 sont seulement en nombre fini,
contrairement aux
isométries euclidiennes qui forment un groupe infini mais compact (pas très
difficile à
montrer). Sur R" , la géométrie euclidienne est donc plus riche que celle des
normes p pour
p = 2 .
Fin de l'énoncé
6/6