
e3a Informatique MP 2006
| Thème de l'épreuve | Quatre algorithmes de tri sur les tableaux |
| Principaux outils utilisés | tableaux, tris, arbres binaires |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)
Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
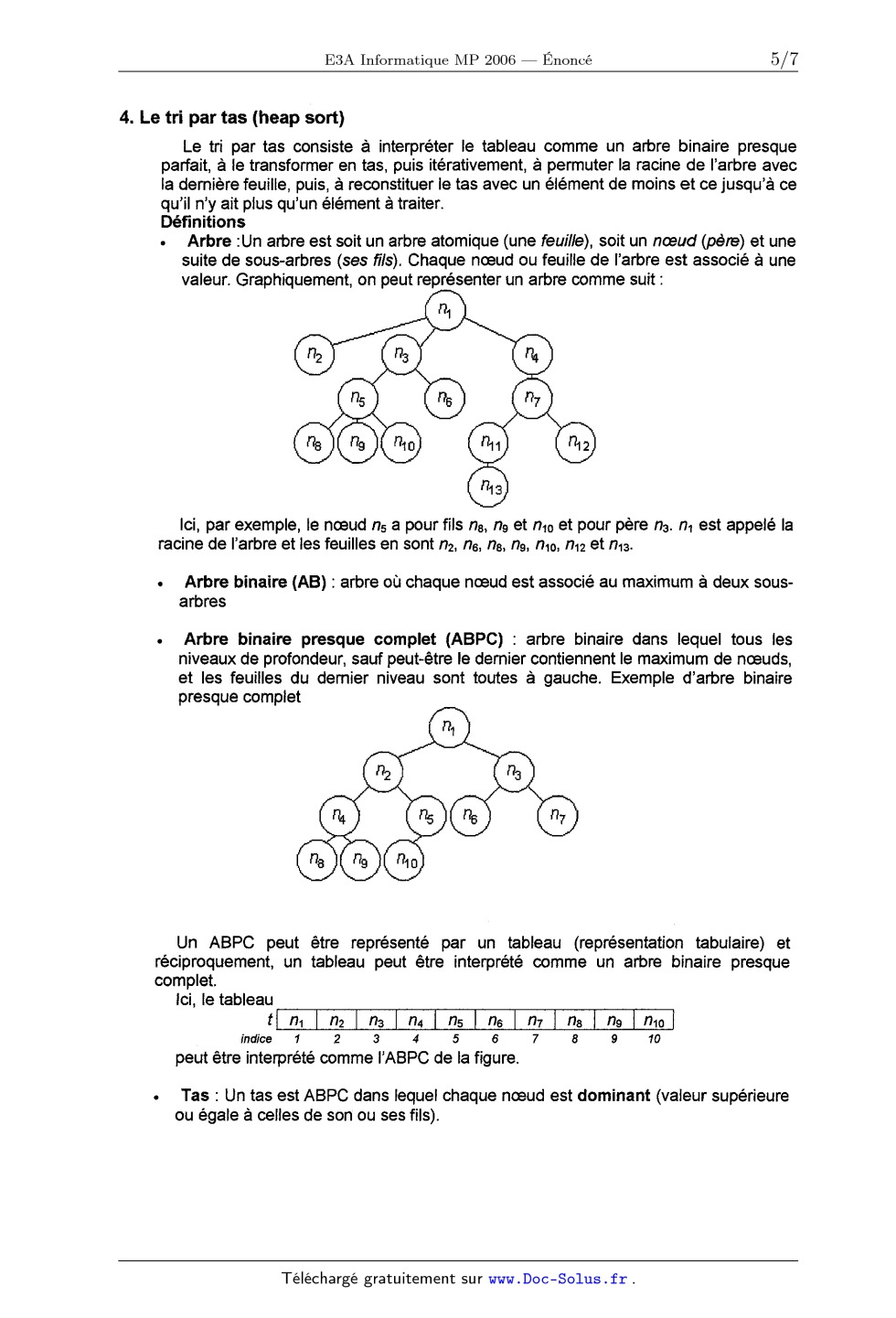
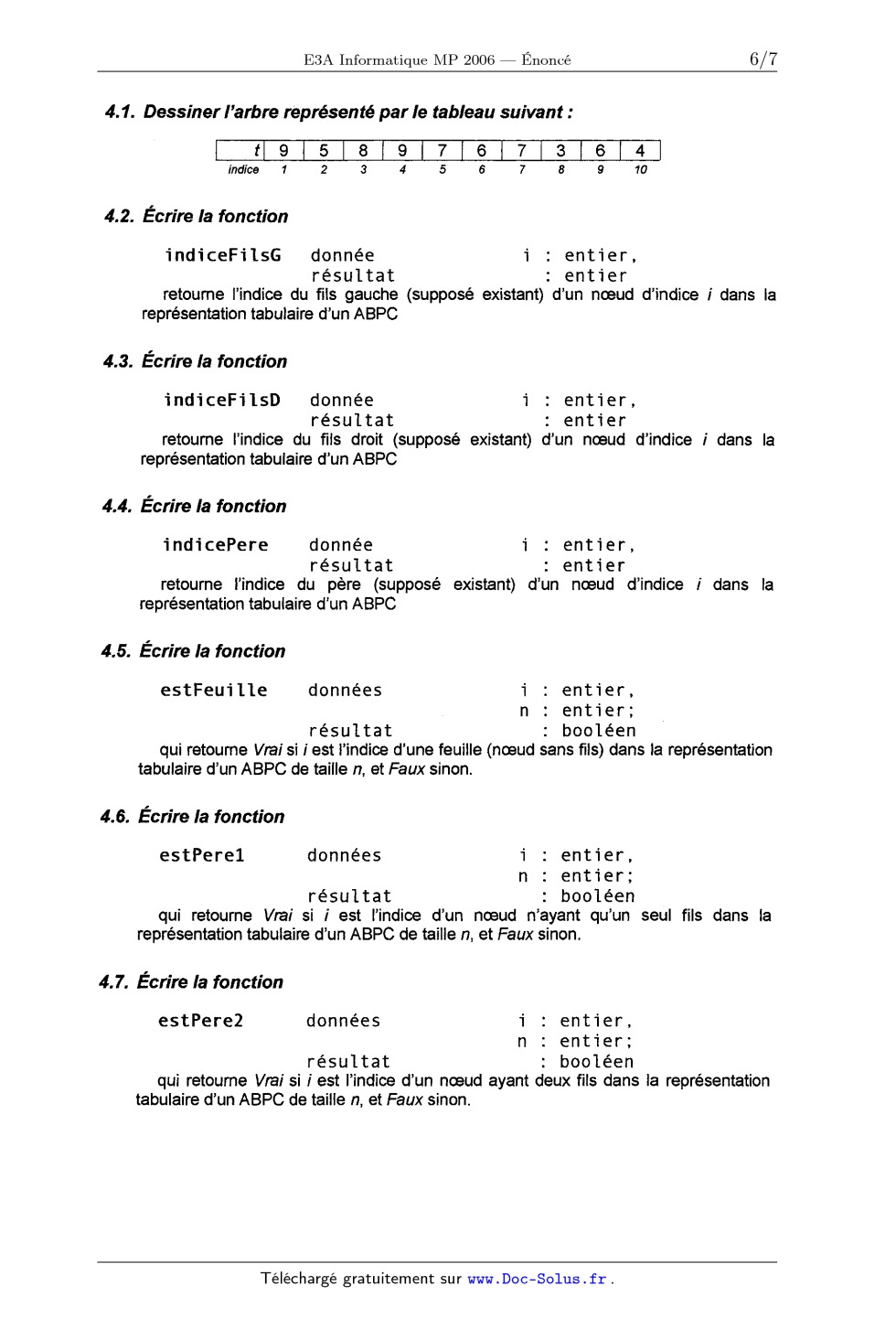
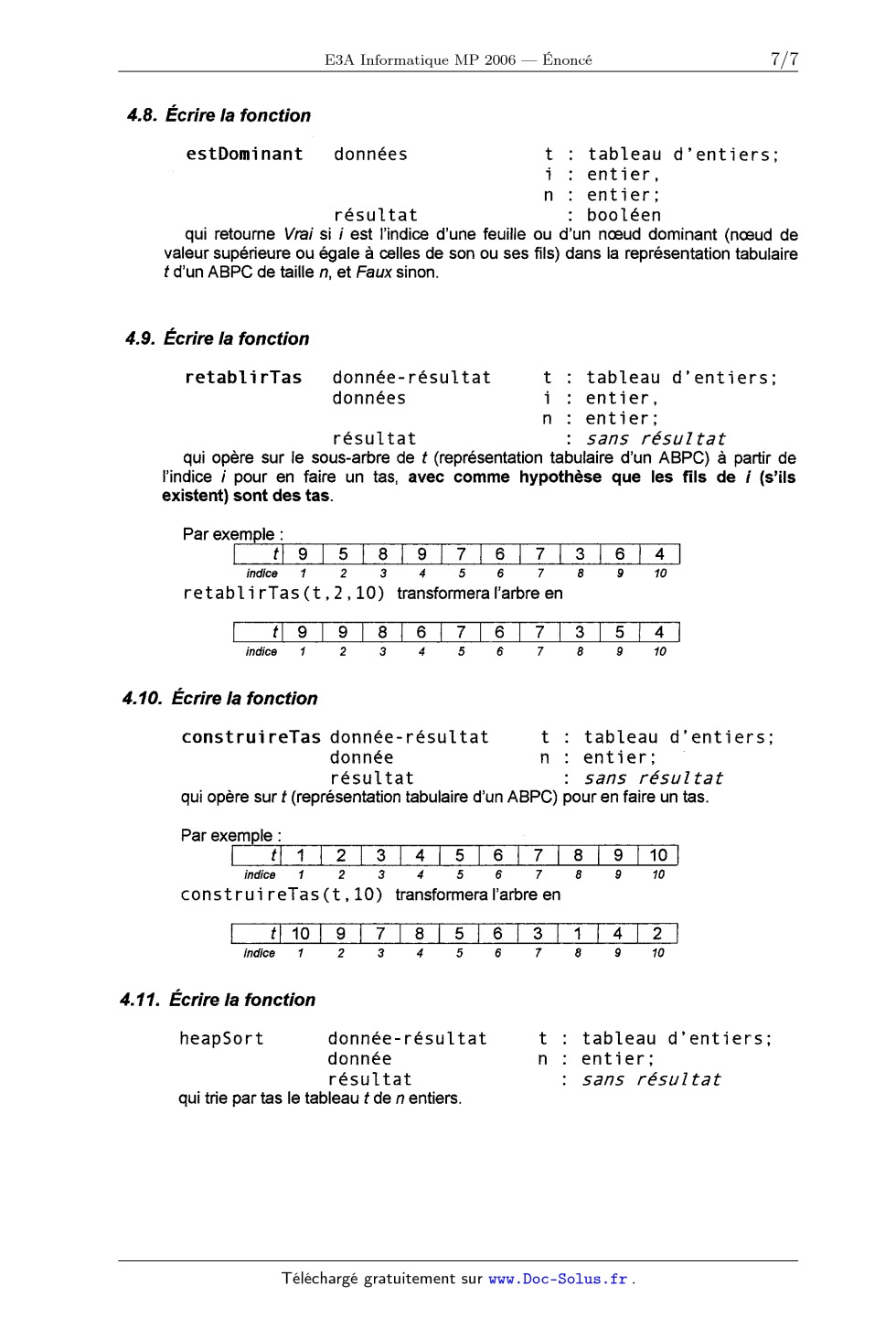
\ E' 3 CONCOURS ENSAM - ESTP - EUCLIDE - ARCHIMEDE Epreuve d'Informatique MP durée 3 heures Si, au cours de l'épreuve, un candidat repère ce qui lui semble être une erreur d'énoncé, d'une part il le signale au chef de salle, d'autre part il le signalesur sa copie et poursuit sa composition en indiquant les raisons des initiatives qu'il est amené à prendre. L'usage de la calculatrice est interdit Indiquer en tête de copie ou de chaque exercice le langage utilisé. On utilisera la notation t [i] pour accéder à l'élément n° i d'un tableau t. On indicera les tableaux à partir de 1, quitte à ne jamais prendre en compte l'élément d'indice 0 dans un langage où les tableaux sont indicés à partir de O. 1. Le tri par sélection ' Le tri (croissant) par sélection d'un tableau tde n éléments consiste à rechercher le plus grand élément, le permuter avec l'élément situé en fin de tableau, et à itérer le traitement avec un élément de moins, jusqu'à ce qu'il n'y ait plus qu'un seul élément. 1 . 1 . Écrire la fonction indiceMaxi données t : tableau d'entiers, n : entier; résultat : entier; qui recherche dans un tableau tde n entiers le plus grand entier et retourne son indice. S'il y a plusieurs maxima égaux, elle retourne l'indice du premier de ceux--ci. 1.2. Écrire la fonction ITÉRATIVE triSe1ecl donnée--résu1tat t : tableau d'entiers ; donnée n : entier; résultat : sans retour qui trie par sélection le tableau tde n entiers. 1.3. Écrire la fonction RÉCURSIVE triSe1ec2 donnée-résultat t : tabteau d'entiers ; donnée n : entier; résultat : sans retour qui trie par sélection le tableau t de n entiers. 1.4. Donner la complexité de ce tri. 2. Tri par insertion ' Le tri (croissant) par insertion d'un tableau tde n éléments consiste à rechercher itérativement la place d'insertion de l'élément n°i dans le sous-tableau précédent (indicé de 1 à i-1) supposé trié et à l'insérer à sa place. On commence à partir du deuxième élément et on termine quand tous les éléments ont été placés. La recherche de la place d'insertion peut se faire séquentiellement ou par dichotomie. 2. 1. Expliquer brièvement les deux principes de recherche (séquen tie/le et dichotomique) et donner leurs complexités (en moyenne et au pire). 2.2. Écrire la fonction posInserl données t : tableau d'entiers, n : entier, x : entier; résultat : entier; qui recherche séquentiellement dans un tableau t trié de n entiers la place d'insertion de x. 2.3. Écrire la fonction posInser2 données t : tableau d'entiers, n : entier, x : entier; résultat : entier; qui recherche par dichotomie dans un tableau ttrié de n entiers la place d'insertion dex. ' « 2.4. Écrire la fonction decale donnée-résultat t : tableau d'entiers ; données î : entier, j : entier; résultat : sans retour qui décale d'une position vers la droite tous les éléments du tableau t depuis l'indice i jusqu'à l'indice j (compris) 2.5. Écrire la fonction ITÉRATIVE triInser donnée--résultat t : tableau d'entiers ; donnée n : entier ; résultat : sans retour qui trie par insertion le tableau t de n entiers. 3. Tri rapide (quick sort) Le principe du quick sort est de partitionner le tableau à trier (s'il a au moins deux éléments) en trois sous--tableaux, le premier comprenant tous les éléments inférieurs ou égaux à un élément (l'élément pivot), le deuxième ne contenant qu'un seul élément (l'élément pivot) et le troisième contenant tous les éléments supérieurs ou égaux à l'élément pivot. Puis on réapplique récursivement le quick sort sur les premier et troisième sous--tableaux (l'élément pivot, lui, est à sa place définitive). Soit les fonctions partition donnée-résultat t : tableau d'entiers ; données f : entier, j : entier; résultat : entier qui opère sur le sous--tableau t compris entre les indices i et j, prend t[ü comme élément pivot, déplace les éléments inférieurs ou égaux au pivot en début de sous-- tableau, les éléments supérieurs ou égaux au pivot en fin de sous--tableau, positionne le pivot à sa place définitive et retourne la valeur de cette place et quicksort donnée--résultat t : tableau d'entiers ; données i : entier, j : entier; résultat : sans retour qui trie le tableau t entre les indices i et j (compris) Soit le tableau suivant: _ _ t ...E- 2 3 4 5 6 7 8 9 10 11 12 13 14 indice 1 3.1. Donner un contenu possible de t après l'appel à pa rti t i on( t , 1 , 14) , et la valeur de retour de la fonction 3.2. Avec quels paramètres doit--on appeler qu i ckso rt pour continuer le tri après cette partition ? 3.3. Écrire la fonction quicksort 3.4. Écrire la fonction partition On pourra utiliser deux parcours, l'un allant du début du sous--tableau vers la fin, et l'autre allant de la fin vers le début. Le parcours montant sera suspendu quand un élément sera supérieur au pivot ; le parcours descendant sera suspendu quand un élément sera inférieur au pivot. Les éléments seront alors échangés et les parcours reprendront jusqu'à ce qu'ils se rejoignent. La place du pivot sera alors déterminée, le pivot y sera mis, et sa place retoumée. 4. Le tri par tas (heap Sort) Le tri par tas consiste à interpréter le tableau comme un arbre binaire presque parfait, à le transformer en tas, puis itérativement, à permuter la racine de l'arbre avec la dernière feuille, puis, à reconstituer le tas avec un élément de moins et ce jusqu'à ce qu'il n'y ait plus qu'un élément à traiter. Définitions . Arbre :Un arbre est soit un arbre atomique (une feuille), soit un noeud (père) et une suite de sous-arbres (ses fils). Chaque noeud ou feuille de l'arbre est associé à une valeur. Graphiquement, on peut représenter un arbre comme suit: Ici, par exemple, le noeud m; a pour fils ne, ng et n... et pour père n3. m est appelé la racine de l'arbre et les feuilles en sont n2, ne, ne, ng, n..., n... et n.... . Arbre binaire (AB) : arbre où chaque noeud est associé au maximum à deux sous-- arbres . Arbre binaire presque complet (ABPC) : arbre binaire dans lequel tous les niveaux de profondeur, sauf peut--être le dernier contiennent le maximum de noeuds, et les feuilles du dernier niveau sont toutes à gauche. Exemple d'arbre binaire presque complet Un ABPC peut être représenté par un tableau (représentation tabulaire) et réciproquement, un tableau peut être interprété comme un arbre binaire presque complet. Ici, le tableau t-------------- ,indice1 23456 78910 peut être interprété comme l'ABPC de la figure. . Tas : Un tas est ABPC dans lequel chaque noeud est dominant (valeur supérieure ou égale à celles de son ou ses fils). 4.1. Dessiner l'arbre représente parle tableau suivant: U..."flflfl 1 2 3 4 5 6 7 8 9 10 indice 4.2. Écrire la fonction indiceFilsG donnée i : entier, résu1tat : entier retourne l'indice du fils gauche (supposé existant) d'un noeud d'indice i dans la représentation tabulaire d'un ABPC 4.3. Écrire la fonction indiceFilsD donnée i : entier, résu1tat : entier retourne l'indice du fils droit (supposé existant) d'un noeud d'indice i dans la représentation tabulaire d'un ABPC 4.4. Écrire la fonction indicePere donnée i : entier, résultat : entier retourne l'indice du père (supposé existant) d'un noeud d'indice i dans la représentation tabulaire d'un ABPC 4.5. Écrire la fonction estFeuille données i : entier, , n : entier; résultat : booléen qui retourne Vrai si iest l'indioe d'une feuille (noeud sans fils) dans la représentation tabulaire d'un ABPC de taille n, et Faux sinon. 4.6. Écrire la fonction estPerel données i : entier, n : entier; résultat : booiéen qui retourne Vrai si i est l'indice d'un noeud n'ayant qu'un seUI fils dans la représentation tabulaire d'un ABPC de taille n, et Faux sinon. 4.7. Écrire la fonction estPere2 données i : entier, n : entier; résultat : booiéen qui retourne Vrai si i est l'indice d'un noeud ayant deux fils dans la représentation tabulaire d'un ABPC de taille n, et Faux sinon. 4.8. Écrire la fonction estDominant données t : tableau d'entiers; ' 1 : entier, n : entier; résultat : booléen qui retourne Vrai si i est l'indice d'une feuille ou d'un noeud dominant (noeud de valeur supérieure ou égale à celles de son ou ses fils) dans la représentation tabulaire t d'un ABPC de taille n, et Faux sinon. 4.9. Écrire la fonction retablirTas donnée--résultat t : tableau d'entiers; données 1 : entier, n : entier; résultat : sans résultat qui opère sur le sous-arbre de t (représentation tabulaire d'un ABPC) à partir de l'indice i pour en faire un tas, avec comme hypothèse que les fils de i (s'ils existent) sont des tas. Par exemplet: indice retabli rTas (t , 22 , 10) transformera l' 67arbre en indice 4. 10. Écrire la fonction construireTas donnée--résultat t : tableau d' entiers; donnée n : entier; résultat : sans résultat qui opère sur t (représentation tabulaire d'un ABPC) pour en faire un tas. Par exemple: ---------u-un indice const ru1reTas(t2,10)3 transformera l"arbre en -fl-u-fl---- indice AL11.ÉËmÜeiafbncfion heapSort donnée--résultat t : tableau d'entiers; donnée n : entier; résultat : sans résultat qui trie par tas le tableau t de n entiers.