
Centrale Informatique MP-PC-PSI 2017
| Thème de l'épreuve | Mars Exploration Rovers: mission d'exploration martienne |
| Principaux outils utilisés | algorithmique, recherche de minimum, listes, SQL |
| Mots clefs | numpy, calcul de distances, minimisation, algorithme génétique, algorithme du plus proche voisin, jointure, robot, Mars |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)
Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ç, % ln ormatique "
"a « "'
__/ MP, PC, PSI, TSI @
UNEUURSEENTHHLE-SUPËLEE 3 heures Calculatrices autorisées N
Mars Eæploration Rovers
Mission d'eoeploration martienne
Mars Eæploration Rovers (MER) est une mission de la NASA qui cherche à étudier
le rôle joué par l'eau dans
l'histoire de la planète Mars. Deux robots géologues, Spirit et Opportunity
(figure 1), se sont posés sur cette
planète, sur deux sites opposés, en janvier 2004. Leur mission est de
rechercher et d'analyser différents types de
roches et de sols qui peuvent contenir des indices sur la présence d'eau. Ils
sont équipés de six roues et d'une
suspension spécialement conçue pour leur permettre de se déplacer quelle que
soit la nature du terrain rencontré
Leur cahier des charges prévoyait une durée de vie de 90 jours martiens (le
jour martien est environ 40 minutes
plus long que le jour terrestre). Spirit a cessé d'émettre le 22 mars 2010,
soit 2210 jours martiens après son
arrivée sur la planète. Début 2017, Opportunity est toujours en activité et il
a parcouru plus de 44 km sur Mars
Figure 1 Vue d'artiste d'un robot géologue de la mission Mars Exploration
Rovers (NASA/JPL -- Cal--
tech / Cornell)
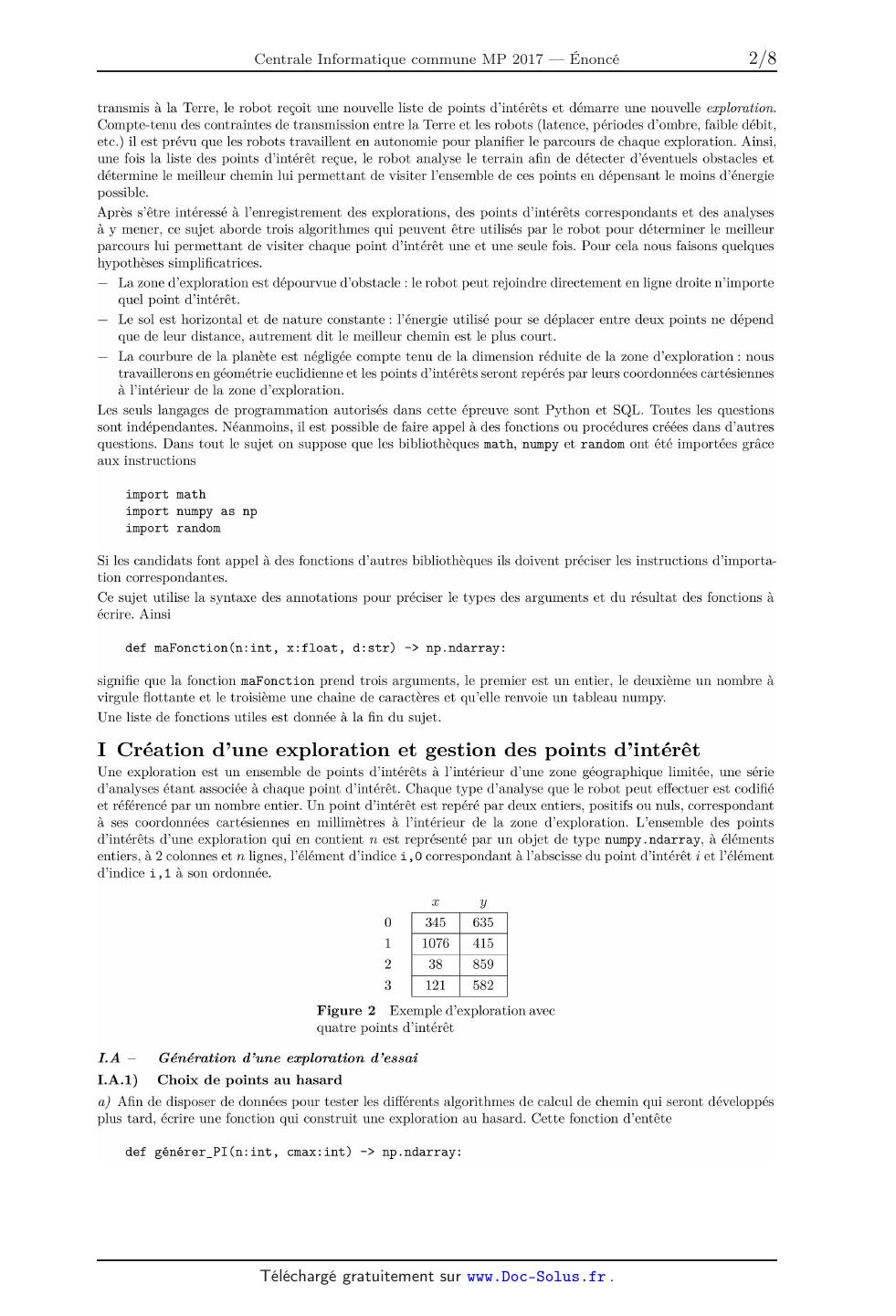
Chaque robot est équipé de plusieurs instruments d'analyse (caméra, microscope,
spectromètres) et d'un bras
qui permet d'amener les instruments au plus près des roches et sols dignes
d'intérêt. À partir de photographies de
la surface de la planète, prises à plusieurs longueurs d'ondes par différents
satellites et par le robot lui--même, les
scientifiques de la NASA définissent une liste d'emplacements (points d'intérêt
ou PI) où effectuer des analyses
Cette liste est transmise au robot qui doit se rendre a chaque emplacement
indiqué et y effectuer les analyses
prévues. Chaque robot est capable d'effectuer un certain nombre de types
d'analyses géologiques correspondant
aux difiérents instruments dont il dispose. Une fois tous les points d'intérêts
visités et les résultats des analyses
2017--03.27 20:13:45 Page 1/8 E': 'BY'NC'SA
transmis à la Terre, le robot reçoit une nouvelle liste de points d'intérêts et
démarre une nouvelle exploration.
Compte--tenu des contraintes de transmission entre la Terre et les robots
(latence, périodes d'ombre, faible débit,
etc.) il est prévu que les robots travaillent en autonomie pour planifier le
parcours de chaque exploration. Ainsi,
une fois la liste des points d'intérêt reçue, le robot analyse le terrain afin
de détecter d'éventuels obstacles et
détermine le meilleur chemin lui permettant de visiter l'ensemble de ces points
en dépensant le moins d'énergie
possible.
Après s'être intéressé à l'enregistrement des explorations, des points
d'intérêts correspondants et des analyses
à y mener, ce sujet aborde trois algorithmes qui peuvent être utilisés par le
robot pour déterminer le meilleur
parcours lui permettant de visiter chaque point d'intérêt une et une seule
fois. Pour cela nous faisons quelques
hypothèses simplificatrices.
-- La zone d'exploration est dépourvue d'obstacle : le robot peut rejoindre
directement en ligne droite n'importe
quel point d'intérêt.
-- Le sol est horizontal et de nature constante : l'énergie utilisé pour se
déplacer entre deux points ne dépend
que de leur distance, autrement dit le meilleur chemin est le plus court.
-- La courbure de la planète est négligée compte tenu de la dimension réduite
de la zone d'exploration : nous
travaillerons en géométrie euclidienne et les points d'intérêts seront repérés
par leurs coordonnées cartésiennes
a l'intérieur de la zone d'exploration.
Les seuls langages de programmation autorisés dans cette épreuve sont Python et
SQL. Toutes les questions
sont indépendantes. Néanmoins, il est possible de faire appel a des fonctions
ou procédures créées dans d'autres
questions. Dans tout le sujet on suppose que les bibliothèques math, numpy et
random ont été importées grâce
aux instructions
import math
import numpy as np
import random
Si les candidats font appel a des fonctions d'autres bibliothèques ils doivent
préciser les instructions d'importa--
tion correspondantes.
Ce sujet utilise la syntaxe des annotations pour préciser le types des
arguments et du résultat des fonctions à
écrire. Ainsi
def maFonction(n:int, x:float, d:str) --> np.ndarray:
signifie que la fonction maFonction prend trois arguments, le premier est un
entier, le deuxième un nombre a
virgule flottante et le troisième une chaine de caractères et qu'elle renvoie
un tableau numpy.
Une liste de fonctions utiles est donnée a la fin du sujet.
I Création d'une exploration et gestion des points d'intérêt
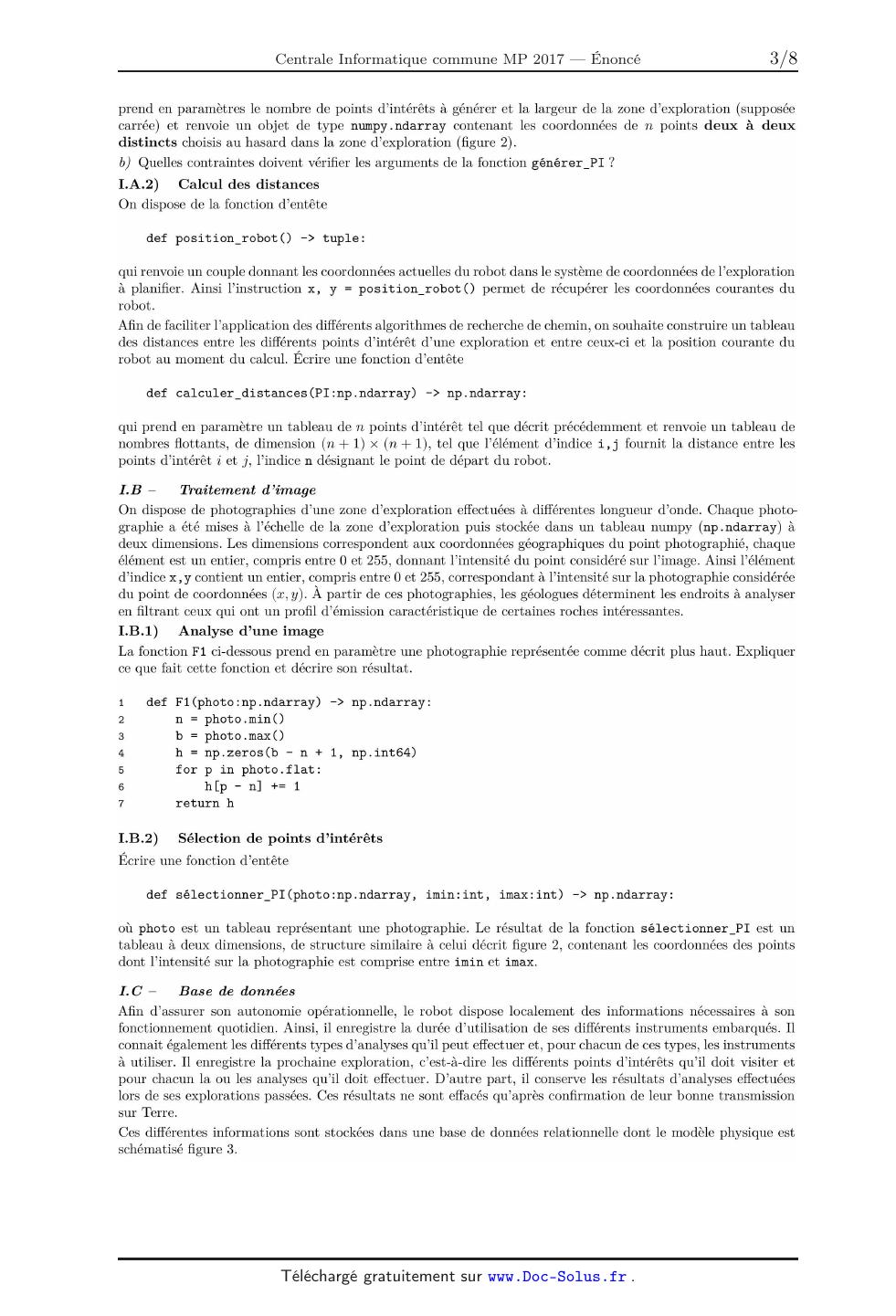
Une exploration est un ensemble de points d'intérêts à l'intérieur d'une zone
géographique limitée, une série
d'analyses étant associée à chaque point d'intérêt. Chaque type d'analyse que
le robot peut effectuer est codifié
et référencé par un nombre entier. Un point d'intérêt est repéré par deux
entiers, positifs ou nuls, correspondant
a ses coordonnées cartésiennes en millimètres à l'intérieur de la zone
d'exploration. L'ensemble des points
d'intérêts d'une exploration qui en contient 71 est représenté par un objet de
type numpy.ndarray, à éléments
entiers, à 2 colonnes et n lignes, l'élément d'indice i , 0 correspondant a
l'abscisse du point d'intérêt i et l'élément
d'indice i , 1 a son ordonnée.
% y
0 345 635
1 1076 415
2 38 859
3 121 582
Figure 2 Exemple d'exploration avec
quatre points d'intérêt
I.A * Génération d'une empl0mtion d'essai
I.A.1) Choix de points au hasard
a ) Afin de disposer de données pour tester les différents algorithmes de
calcul de chemin qui seront développés
plus tard, écrire une fonction qui construit une exploration au hasard. Cette
fonction d'entête
def générer_Pl(n:int, cmax:int) --> np.ndarrayz
20174)a27 20:13:45 Page 2/8 (cc) BY--NC-SA
prend en paramètres le nombre de points d'intérêts à générer et la largeur de
la zone d'exploration (supposée
carrée) et renvoie un objet de type numpy.ndarray contenant les coordonnées de
n points deux à deux
distincts choisis au hasard dans la zone d'exploration (figure 2).
b) Quelles contraintes doivent vérifier les arguments de la fonction générer_Pl
'?
I.A.2) Calcul des distances
On dispose de la fonction d'entête
def position_robot() --> tuple:
qui renvoie un couple donnant les coordonnées actuelles du robot dans le
système de coordonnées de l'exploration
à planifier. Ainsi l'instruction x, y = position_robot () permet de récupérer
les coordonnées courantes du
robot.
Afin de faciliter l'application des différents algorithmes de recherche de
chemin, on souhaite construire un tableau
des distances entre les différents points d'intérêt d'une exploration et entre
ceux--ci et la position courante du
robot au moment du calcul. Ecrire une fonction d'entête
def calculer_distances(PI:np.ndarray) --> np.ndarray:
qui prend en paramètre un tableau de 71 points d'intérêt tel que décrit
précédemment et renvoie un tableau de
nombres flottants, de dimension (n + 1) >< (n + 1), tel que l'élément d'indice i, j fournit la distance entre les points d'intérêt i et ], l'indice n désignant le point de départ du robot. I. B = Traitement d "image On dispose de photographies d'une zone d'exploration effectuées à différentes longueur d'onde. Chaque photo-- graphie a été mises à l'échelle de la zone d'exploration puis stockée dans un tableau numpy (np.ndarray) a deux dimensions. Les dimensions correspondent aux coordonnées géographiques du point photographié, chaque élément est un entier, compris entre 0 et 255, donnant l'intensité du point considéré sur l'image. Ainsi l'élément d'indice x , y contient un entier, compris entre 0 et 255, correspondant à l'intensité sur la photographie considérée du point de coordonnées (a:, y). A partir de ces photographies, les géologues déterminent les endroits à analyser en filtrant ceux qui ont un profil d'émission caractéristique de certaines roches intéressantes. I.B.l) Analyse d'une image La fonction F1 ci--dessous prend en paramètre une photographie représentée comme décrit plus haut. Expliquer ce que fait cette fonction et décrire son résultat. 1 def F1(photo:np.ndarray) --> np.ndarray:
2 n = photo.min()
3 b = photo.max()
4 h = np.zeros(b -- n + 1, np.int64)
5 for p in photo.f1at:
6 h[p -- n] += 1
7 return h
I.B.2) Sélection de points d'intérêts
Écrire une fonction d'entête
def sélectionner_PI (photo :np.ndarray, imin: int , imax: int) --> np.ndarray:
où photo est un tableau représentant une photographie. Le résultat de la
fonction sélectionner_PI est un
tableau a deux dimensions, de structure similaire a celui décrit figure 2,
contenant les coordonnées des points
dont l'intensité sur la photographie est comprise entre imin et imax.
1.0 = Base de données
Afin d'assurer son autonomie opérationnelle, le robot dispose localement des
informations nécessaires à son
fonctionnement quotidien. Ainsi, il enregistre la durée d'utilisation de ses
différents instruments embarqués. ll
connait également les différents types d'analyses qu'il peut effectuer et, pour
chacun de ces types, les instruments
à utiliser. Il enregistre la prochaine exploration, c'est--à--dire les
différents points d'intérêts qu'il doit visiter et
pour chacun la ou les analyses qu'il doit effectuer. D'autre part, il conserve
les résultats d'analyses effectuées
lors de ses explorations passées. Ces résultats ne sont effacés qu'après
confirmation de leur bonne transmission
sur Terre.
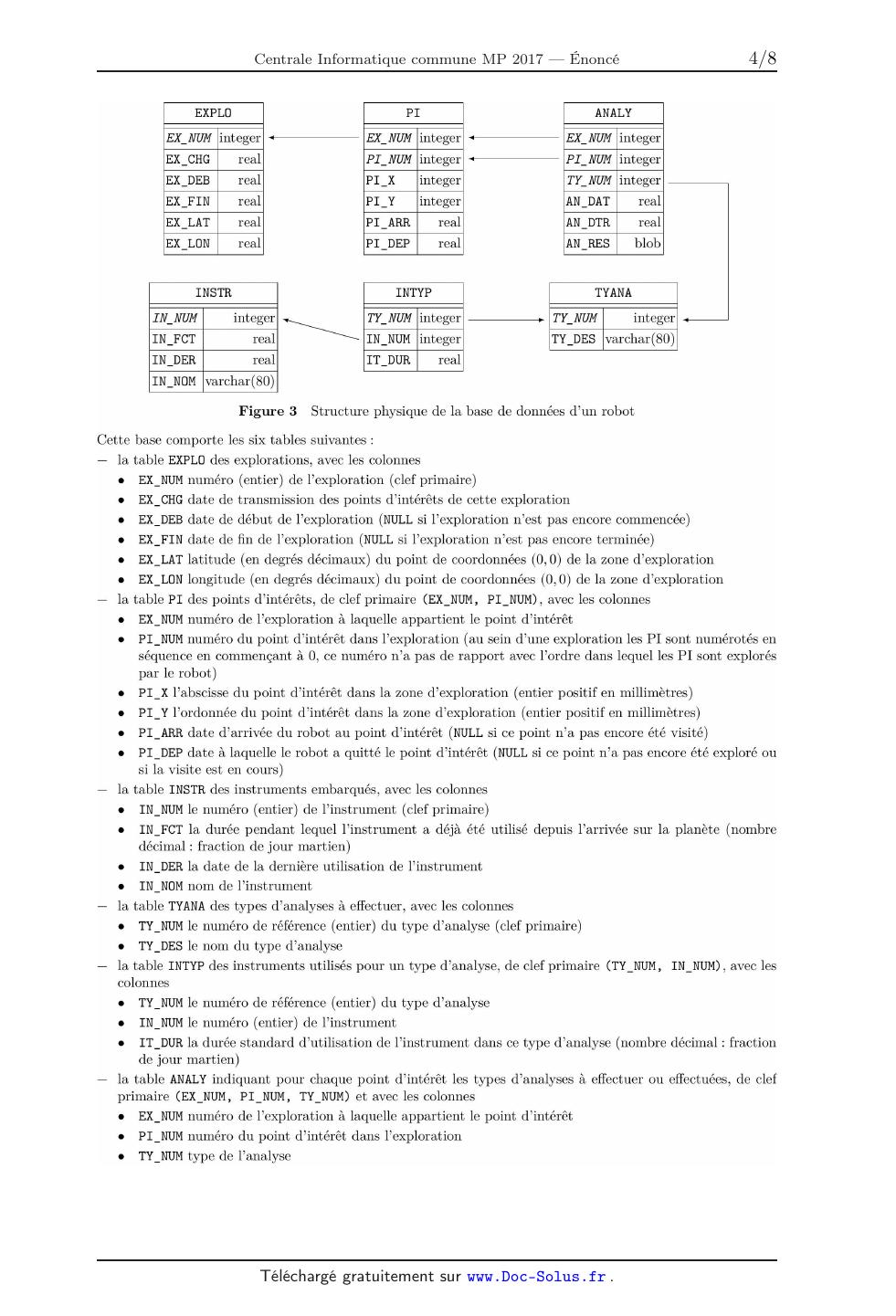
Ces différentes informations sont stockées dans une base de données
relationnelle dont le modèle physique est
schématisé figure 3.
2017--03--27 20:13:45 Page 3/8 @@ BY--NC-SA
EXPLÛ PI ANALY
EX_NUM integer <-- EX_NUM integer <-- EX_NUM integer EX_CHG real PI_NUM integer <-- PI_NUM integer EX_DEB real PI_X integer TY_NUM integer EX_FIN real PI_Y integer AN_DAT real EX_LAT real PI_ARR real AN_DTR real EX_LON real PI_DEP real AN_RES blob INSTR INTYP TYANA IN_NUM integer TY_NUM integer _. TY_NUM integer «_ IN_FCT real \ IN_NUM integer TY_DES varchar(80) IN_DER real IT_DUR real IN_NUM varchar(80) Figure 3 Structure physique de la base de données d'un robot Cette base comporte les six tables suivantes : -- la table EXPLO des explorations, avec les colonnes EX_NUM numéro (entier) de l'exploration (clef primaire) EX_CHG date de transmission des points d'intérêts de cette exploration EX_DEB date de début de l'exploration (NULL si l'exploration n'est pas encore commencée) EX_FIN date de fin de l'exploration (NULL si l'exploration n'est pas encore terminée) EX_LAT latitude (en degrés décimaux) du point de coordonnées (0,0) de la zone d'exploration EX_LON longitude (en degrés décimaux) du point de coordonnées (0,0) de la zone d'exploration -- la table PI des points d'intérêts, de clef primaire (EX_NUM, PI_NUM), avec les colonnes EX_NUM numéro de l'exploration a laquelle appartient le point d'intérêt PI_NUM numéro du point d'intérêt dans l'exploration (au sein d'une exploration les Pl sont numérotés en séquence en commençant à 0, ce numéro n'a pas de rapport avec l'ordre dans lequel les PI sont explorés par le robot) PI_X l'abscisse du point d'intérêt dans la zone d'exploration (entier positif en millimètres) PI_Y l'ordonnée du point d'intérêt dans la zone d'exploration (entier positif en millimètres) PI_ARR date d'arrivée du robot au point d'intérêt (NULL si ce point n'a pas encore été visité) PI_DEP date a laquelle le robot a quitté le point d'intérêt (NULL si ce point n'a pas encore été exploré ou si la visite est en cours) * la table INSTR des instruments embarqués, avec les colonnes IN_NUM le numéro (entier) de l'instrument (clef primaire) IN_FCT la durée pendant lequel l'instrument a déjà été utilisé depuis l'arrivée sur la planète (nombre décimal : fraction de jour martien) IN_DER la date de la dernière utilisation de l'instrument IN_NUM nom de l'instrument * la table TYANA des types d'analyses à effectuer, avec les colonnes TY_NUM le numéro de référence (entier) du type d'analyse (clef primaire) TY_DES le nom du type d'analyse -- la table INTYP des instruments utilisés pour un type d'analyse, de clef primaire (TY_NUM, IN_NUM), avec les colonnes TY_NUM le numéro de référence (entier) du type d'analyse IN_NUM le numéro (entier) de l'instrument IT_DUR la durée standard d'utilisation de l'instrument dans ce type d'analyse (nombre décimal : fraction de jour martien) * la table ANALY indiquant pour chaque point d'intérêt les types d'analyses a effectuer ou effectuées, de clef primaire (EX_NUM, PI_NUM, TY_NUM) et avec les colonnes EX_NUM numéro de l'exploration a laquelle appartient le point d'intérêt PI_NUM numéro du point d'intérêt dans l'exploration TY_NUM type de l'analyse 2017--03--27 20:13:45 Page 4/8 (CC) BY--NC-SA . AN_DAT date de l'analyse (NULL si l'analyse n'a pas été effectuée) . AN_DTR date de transmission sur Terre des résultats de l'analyse (NULL si l'analyse n'a pas été transmise) . AN_RES résultat de l'analyse (donnée opaque dont la signification dépend du type d'analyse) Toutes les dates sont stockées sous forme d'un nombre décimal correspondant au nombre de jours martiens depuis l'arrivée du robot sur la planète. I.C.1) Écrire une requête SQL qui donne le numéro de l'exploration en cours, s'il y en a une. I.C.2) Écrire une requête SQL qui donne, pour une exploration dont on connait le numéro, la liste des points d'intérêts de cette exploration avec leurs coordonnées. I.C.3) Écrire une requête SQL qui donne la surface, en mètres carrés, de chaque zone déjà explorée par le robot. La zone d'exploration est définie comme le plus petit rectangle qui englobe l'ensemble des points d'intérêts de l'exploration et dont les bords sont parallèles aux axes de référence (axes des abscisse et des ordonnées). I.C.4) Quelle est la surface maximale d'une zone d'exploration que peut stocker cette base de données '? I.C.5) Écrire une requête SQL qui donne, pour l'exploration en cours, le nombre de fois où chaque instrument doit être utilisé et sa durée d'utilisation théorique (en jours martiens) pour la totalité de l'exploration. II Planification d'une exploration : première approche Avant de démarrer une nouvelle exploration, le robot doit déterminer un chemin qui lui permet de passer par tous les points d'intérêts une et une seule fois. L'enjeu de l'opération est de trouver le chemin le plus court possible afin de limiter la dépense d'énergie et de limiter l'usure du robot. Chaque point d'intérêt sera repéré par un entier positif ou nul correspondant a son indice dans le tableau des points d'intérêt. Un chemin d'exploration sera représenté par un objet de type list donnant les indices des points d'intérêt dans l'ordre de leur parcours. II.A -- Quelques fonctions utilitaires II.A.1) Longueur d'un chemin Écrire une fonction d'entôte def longueur_chemin(cheminzlist, d:np.ndarray) --> float:
qui prend en paramètre un chemin à parcourir et la matrice des distances entre
points d'intérêt (telle que
renvoyée par la fonction calculer_distances) et renvoie la distance que doit
effectuer le robot pour suivre
ce chemin en partant de sa position courante (correspondant à la dernière
ligne/ colonne du tableau d) et en
visitant tous les points d'intérêt dans l'ordre indiqué.
II.A.2) Normalisation d'un chemin
Écrire une fonction d'entête
def normaliser_chemin(chemin:list, n:int) --> list:
qui prend en paramètre une liste d'entiers et renvoie une liste correspondant a
un chemin valide, c'est--à--dire
contenant une seule fois tous les entiers entre 0 et n (exclu). Pour cela cette
fonction commence par supprimer
les éventuels doublons (en ne conservant que la première occurrence) et les
valeurs supérieures ou égales à 11,
sans modifier l'ordre relatif des éléments conservés, puis ajoute à la fin les
éventuels éléments manquants en
ordre croissant de numéros.
II.B * Force brute
Pour rechercher le plus court chemin, on peut imaginer de considérer tous les
chemins possibles et de calculer
leur longueur. On obtiendra ainsi a coup sûr le chemin le plus court.
II.B.1) Déterminer en fonction de n, nombre de points à visiter, le nombre de
chemins possibles passant
exactement une fois par chacun des points.
II.B.2) Cet algorithme est--il utilisable pour une zone d'exploration contenant
20 points d'intérêts '? Justifier.
II.C * Algorithme du plus proche voisin
Une idée simple pour obtenir un algorithme utilisable est de construire un
chemin en choisissant systématique--
ment le point, non encore visité, le plus proche de la position courante.
II.C.1) Écrire une fonction d'entête
def plus_proche_voisin(d:np.ndarray) --> list:
qui prend en paramètre le tableau des distances résultat de la fonction
calculer_distances (question l.A.2)
et fournit un chemin d'exploration en appliquant l'algorithme du plus proche
voisin.
2017--03--27 20:13:45 Page 5/8 @@ BY--NC-SA
II.C.2) Quelle est la complexité temporelle de l'algorithme du plus proche
voisin en considérant que cet
algorithme est constitué des deux fonctions calculer_distances et
plus_proche_voisin '?
II.C.3) En considérant les trois points de coordonnées (0, 0), (0, 3000), (0,
7000) et en choisissant un point de
départ adéquat pour le robot, montrer que l'algorithme du plus proche voisin ne
fournit pas nécessairement le
plus court chemin.
Dans la pratique, on constate que, dès que le nombre de points d'intérêt
devient important, l'algorithme du
plus proche voisin fournit un chemin qui peut être 50% plus long que le plus
court chemin.
III Deuxième approche : algorithme génétique
Les algorithmes génétiques s'inspirent de la théorie de l'évolution en simulant
l'évolution d'une population. Ils
font intervenir cinq traitements.
l. Initialisation
Il s'agit de créer une population d'origine composée de m individus (ici des
chemins pour l'exploration à
planifier). Généralement la population de départ est produite aléatoirement.
2. Évaluation
Cette étape consiste à attribuer à chaque individu de la population courante
une note correspondant a sa
capacité à répondre au problème posé. Ici la note sera simplement la longueur
du chemin.
3. Sélection
Une fois tous les individus évalués, l'algorithme ne conserve que les «
meilleurs » individus. Plusieurs mé--
thodes de sélection sont possibles : choix aléatoire, ceux qui ont obtenu la
meilleure note, élimination par
tournoi, etc.
4. Croisement
Les individus sélectionnés sont croisés deux à deux pour produire de nouveaux
individus et donc une nouvelle
population. La fonction de croisement (ou reproduction) dépend de la nature des
individus.
5. Mutation
Une proportion d'individus est choisie (généralement aléatoirement) pour subir
une mutation, c'est--à--dire
une transformation aléatoire. Cette étape permet d'éviter à l'algorithme de
rester bloqué sur un optimum
local.
En répétant les étapes de sélection, croisement et mutation, l'algorithme fait
ainsi évoluer la population, jus--
qu'à trouver un individu qui réponde au problème initial. Cependant dans les
cas pratiques d'utilisation des
algorithmes génétiques, il n'est pas possible de savoir simplement si le
problème est résolu (le plus court che--
min figure--t--il dans ma population ?). On utilise donc des conditions d'arrêt
heuristiques basées sur un critère
arbitraire.
Le but de cette partie est de construire un algorithme génétique pour
rechercher un meilleur chemin d'exploration
que celui obtenu par l'algorithme du plus proche voisin.
III.A -- Initialisation et évaluation
Une population est représentée par une liste d'individus, chaque individu étant
représenté par un couple (lon--
gueur, chemin} dans lequel
-- chemin désigne un chemin représenté comme précédemment par une liste
d'entiers correspondant aux indices
des points d'intérêt dans le tableau des distances produit par la fonction
calculer_distances ;
-- longueur est un entier correspondant a la longueur du chemin, en tenant
compte de la position de départ du
robot.
Écrire une fonction d'entête
def créer_population(m:int, d:np.ndarray) --> list:
qui crée une population de m individus aléatoires. Cette fonction prend en
paramètre le nombre d'individus a
engendrer et le tableau des distances entre points d'intérêt (et la position
courante du robot) tel que produit par
la fonction calculer_distances. Elle renvoie une liste d'individus,
c'est--à--dire de couples ( longueur, chemin )
III.B -- Sélection
Écrire une fonction d'entête
def réduire(pzlist) --> None:
qui réduit une population de moitié en ne conservant que les individus
correspondant aux chemins les plus
courts. On rappelle que p est une liste de couples ( longueur, chemin ) La
fonction réduire ne renvoie pas de
résultat mais modifie la liste passée en paramètre.
2017-03-27 20:13:45 Page 6/8 (66 BY--NC-SA
III.C * Mutation
III.C.1) Écrire une fonction d'entête
def muter_chemin(czlist) --> None:
qui prend en paramètre un chemin et le transforme en inversant aléatoirement
deux de ses éléments.
III.C.2) Ecrire une fonction d'entête
def muter_population(pzlist, probazfloat, d:np.ndarray) --> None:
qui prend en paramètre une population dont elle fait muter un certain nombre
d'individus. Le paramètre proba
(compris entre 0 et l) désigne la probabilité de mutation d'un individu. Le
paramètre d est la matrice des
distances entre points d'intérêt.
III.D * Croisement
III.D.1) Écrire une fonction d'entête
def croiser(cl:list, c2:list) --> list:
qui crée un nouveau chemin a partir de deux chemins passés en paramètre. Ce
nouveau chemin sera produit en
prenant la première moitié du premier chemin suivi de la deuxième moitié du
deuxième puis en « normalisant »
le chemin ainsi obtenu.
III.D.2) Écrire une fonction d'entête
def nouvelle_génëration(p:list, d:np.ndarray) --> None:
qui fait grossir une population en croisant ses membres pour en doubler
l'effectif. Pour cela, la fonction fait se
reproduire tous les couples d'individus qui se suivent dans la population (p
[i] , p [i+1]) et (p [m--1] , p[O])
de façon à produire m nouveaux individus qui s'ajoutent aux m individus de la
population de départ.
III.E * Algorithme complet
III.E.1) Écrire une fonction d'entête
def algo_génétique(Pl:np.ndarray, m:int, proba:float, g:int) --> float, list:
qui prend en paramètre un tableau de points d'intérêts (figure 2), la taille m
de la population, la probabilité
de mutation proba et le nombre de générations g. Cette fonction implante un
algorithme génétique a l'aide
des différentes fonctions écrites jusqu'à présent et renvoie la longueur du
plus court chemin d'exploration et le
chemin lui--même obtenus au bout de g générations.
III.E.2) Est--il possible avec l'implantation réalisée, qu'une itération de
l'algorithme dégrade le résultat : le
meilleur chemin obtenu à la génération n + 1 est plus long que celui de la
génération n ?
Dans l'affirmative, comment modifier le programme pour que cette situation ne
puisse plus arriver '?
III.E.3) Quelles autres conditions d'arrêt peut--on imaginer '? Établir un
comparatif présentant les avantages
et inconvénients de chaque condition d'arrêt envisagée.
Opérations et fonctions Python disponibles
Fonctions
-- range (n) renvoie la séquence des 11 premiers entiers (O --> n -- l)
-- list (range (n)) renvoie une liste contenant les 11 premiers entiers dans
l'ordre croissant :
list(range(5)) _) [O, 1, 2, 3, 4]
-- random.randrange (a, b) renvoie un entier aléatoire compris entre a et b--1
inclus (a et b entiers)
-- random . random() renvoie un nombre flottant tiré aléatoirement dans {D, Il
suivant une distribution uniforme
-- random. shuffle (u) permute aléatoirement les éléments de la liste 11
(modifie u)
-- random.sample(u, n) renvoie une liste de 11 éléments distincts de la liste
11 choisis aléatoirement, si n >
len(u), déclenche l'exception ValueError
-- math. sqrt (x) calcule la racine carrée du nombre oe
-- math. ceil (x) renvoie le plus petit entier supérieur ou égal à x
2017-03-27 20:13:45 Page 7/8 @@ BY--NC-SA
math. floor(x) renvoie le plus grand entier inférieur ou égal à x
sorted(u) renvoie une nouvelle liste contenant les éléments de la liste u triés
dans l'ordre « naturel » de ses
éléments (si les éléments de u sont des listes ou des tuples, l'ordre utilisé
est l'ordre lexicographique)
Opérations sur les listes
1en(u) donne le nombre d'éléments de la liste u :
1en([1, 2, 3]) --> 3; len([[1,2] , [3,4]]) --> 2
u + v construit une liste constituée de la concaténation des listes u et v :
[l, 2] + [3, 4, 5] --> [1, 2, 3, 4, 5]
n * u construit une liste constitué de la liste u concaténée 11 fois avec
elle--même :
3 *[1, 2] --> [1, 2, 1, 2, 1, 2]
e in 11 et e not in u déterminent si l'objet e figure dans la liste u, cette
opération a une complexité
temporelle en O(len(u))
2 in [1, 2, 3] --> True ; 2 not in [1, 2, 3] --> False
u. append(e) ajoute l'élément e a la fin de la liste u (similaire a u = u + [e])
del u[i] supprimé de la liste 11 son élément d'indice i
del u [i : j] supprime de la liste u tous ses éléments dont les indices sont
compris dans l'intervalle li, jl
u . remove (e) supprime de la liste u le premier élément qui a pour valeur e,
déclenche l'exception ValueError
si e ne figure pas dans u, cette opération a une complexité temporelle en
O(len(u))
u. insert (i , e) insère l'élément e a la position d'indice i dans la liste 11
(en décalant les éléments suivants) ;
si 1 >= 1en(u), e est ajouté en fin de liste
u[i] , u[j] = u[j] , u[i] permute les éléments d'indice i et j dans la liste u
u. sort () trie la liste u en place, dans l'ordre « naturel » de ses éléments
(si les éléments de u sont des listes
ou des tuples, l'ordre utilisé est l'ordre lexicographique)
Opérations sur les tableauæ (np.ndarray)
np . array(u) crée un nouveau tableau contenant les éléments de la liste u. La
taille et le type des éléments
de ce tableau sont déduits du contenu de u
np.empty(n, dtype), np. empty( (n, m) , dtype) crée respectivement un vecteur à
11 éléments ou une ma--
trice à 11 lignes et m colonnes dont les éléments, de valeurs indéterminées,
sont de type dtype qui peut être
un type standard (bool, int, float, .) ou un type spécifique numpy (np.int16,
np.float32, ..). Si le
paramètres dtype n'est pas précisé, il prend la valeur float par défaut
np.zeros(n, dtype), np.zeros((n, m) , dtype) fonctionne comme np.empty en
initialisant chaque élé--
ment a la valeur zéro pour les types numériques ou False pour les types booléens
a.ndim nombre de dimensions du tableau a (1 pour un vecteur, 2 pour une
matrice, etc.)
a. shape tuple donnant la taille du tableau a pour chacune de ses dimensions
1en(a) taille du tableau a dans sa première dimension (nombre d'éléments d'un
vecteur, nombre de lignes
d'une matrice, etc.) équivalent à a. shape [0]
a. size nombre total d'éléments du tableau a
a. flat itérateur sur tous les éléments du tableau a
a.min(), a.max() renvoie la valeur du plus petit (respectivement plus grand)
élément du tableau a; ces
opérations ont une complexité temporelle en O(a.size)
b in a détermine si b est un élément du tableau a ; si b est un scalaire,
vérifie si b est un élément de a ; si
b est un vecteur ou une liste et a une matrice, détermine si b est une ligne de
a
np . concatenate ( (al , a2)) construit un nouveau tableau en concaténant deux
tableaux ; al et a2 doivent
avoir le même nombre de dimensions et la même taille à l'exception de leur
taille dans la première dimension
(deux matrices doivent avoir le même nombre de colonnes pour pouvoir être
concaténées)
oooFlNooo
2017--03--27 20:13:45 Page 8/8 (GQ BY--NC-SA