
Centrale Informatique optionnelle MP 2018
| Thème de l'épreuve | Étude du jeu Ricochet Robots |
| Principaux outils utilisés | recherche dichotomique, tri par insertion, graphes, calcul de complexité en moyenne, programmation |
| Mots clefs | dichotomie, table de hachage, file, graphe, parcours en largeur |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)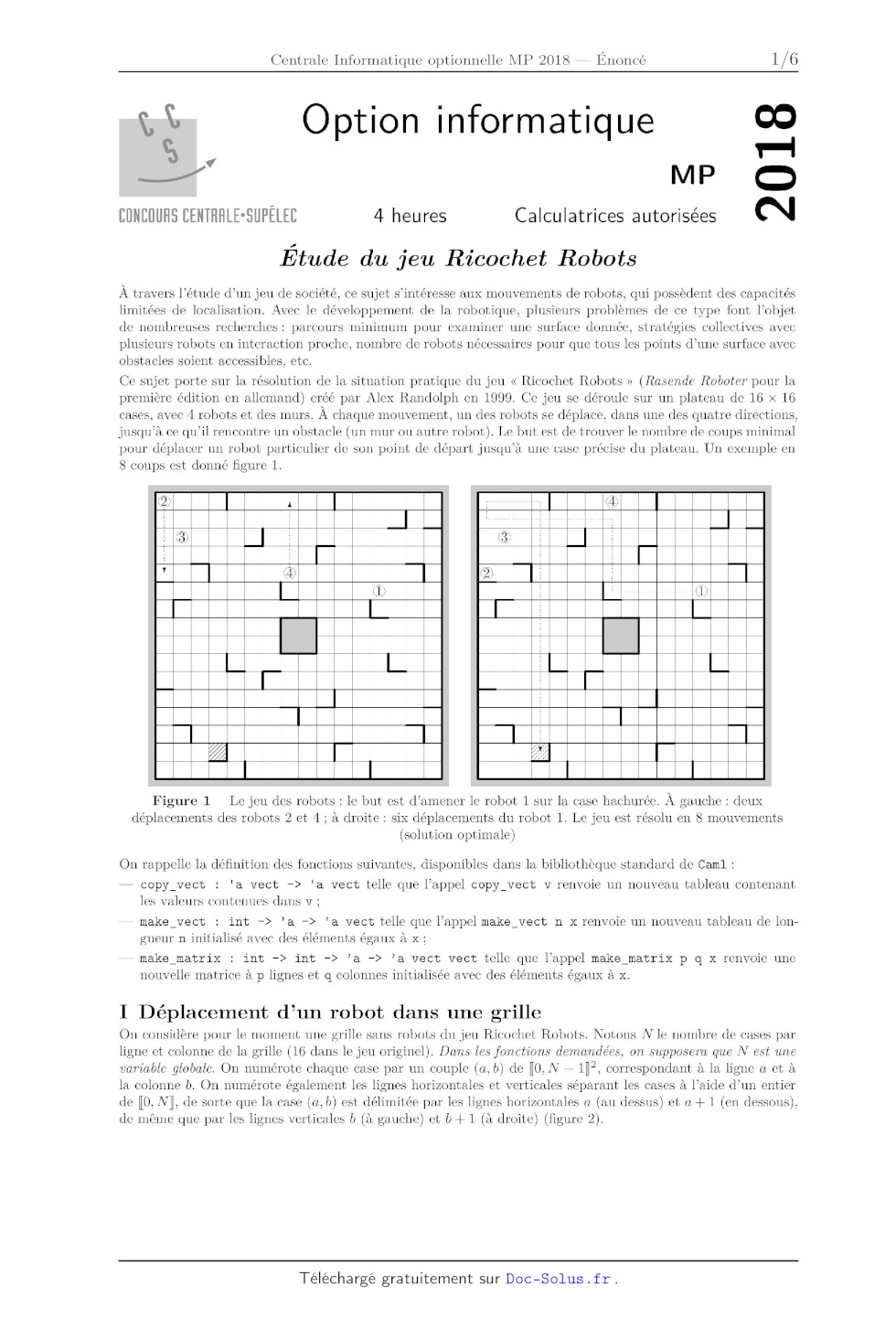

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
t % Option informatique 00
"a , 1--l
_/ MP @
cnncuuns EENÏHHLE--SUPËLEE 4 heures Calculatrices autorisées N
Étude du jeu Ricochet Robots
À travers l'étude d'un jeu de société, ce sujet s'intéresse aux mouvements de
robots, qui possèdent des capacités
limitées de localisation. Avec le développement de la robotique, plusieurs
problèmes de ce type font l'objet
de nombreuses recherches: parcours minimum pour examiner une surface donnée,
stratégies collectives avec
plusieurs robots en interaction proche, nombre de robots nécessaires pour que
tous les points d'une surface avec
obstacles soient accessibles, etc.
Ce sujet porte sur la résolution de la situation pratique du jeu « Ricochet
Robots » (Rasende Roboter pour la
première édition en allemand) créé par Alex Randolph en 1999. Ce jeu se déroule
sur un plateau de 16 >< 16 cases, avec 4 robots et des murs. À chaque mouvement, un des robots se déplace, dans une des quatre directions, jusqu'à ce qu'il rencontre un obstacle (un mur ou autre robot). Le but est de trouver le nombre de coups minimal pour déplacer un robot particulier de son point de départ jusqu'à une case précise du plateau. Un exemple en 8 coups est donné figure 1. Figure 1 Le jeu des robots : le but est d'amener le robot 1 sur la case hachurée. À gauche : deux déplacements des robots 2 et 4 ; à droite : six déplacements du robot 1. Le jeu est résolu en 8 mouvements (solution optimale) On rappelle la définition des fonctions suivantes, disponibles dans la bibliothèque standard de Caml : '-- copy_vect : 'a vect --> 'a vect telle que l'appel copy_vect v renvoie un
nouveau tableau contenant
les valeurs contenues dans V ;
--- make_vect : int --> 'a --> 'a vect telle que l'appel make_vect n x renvoie
un nouveau tableau de lon--
gueur n initialisé avec des éléments égaux à X ;
-- make_matrix : int --> int --> 'a --> 'a vect vect telle que l'appel
make_matrix p q x renvoie une
nouvelle matrice a p lignes et q colonnes initialisée avec des éléments égaux à
x.
I Déplacement d'un robot dans une grille
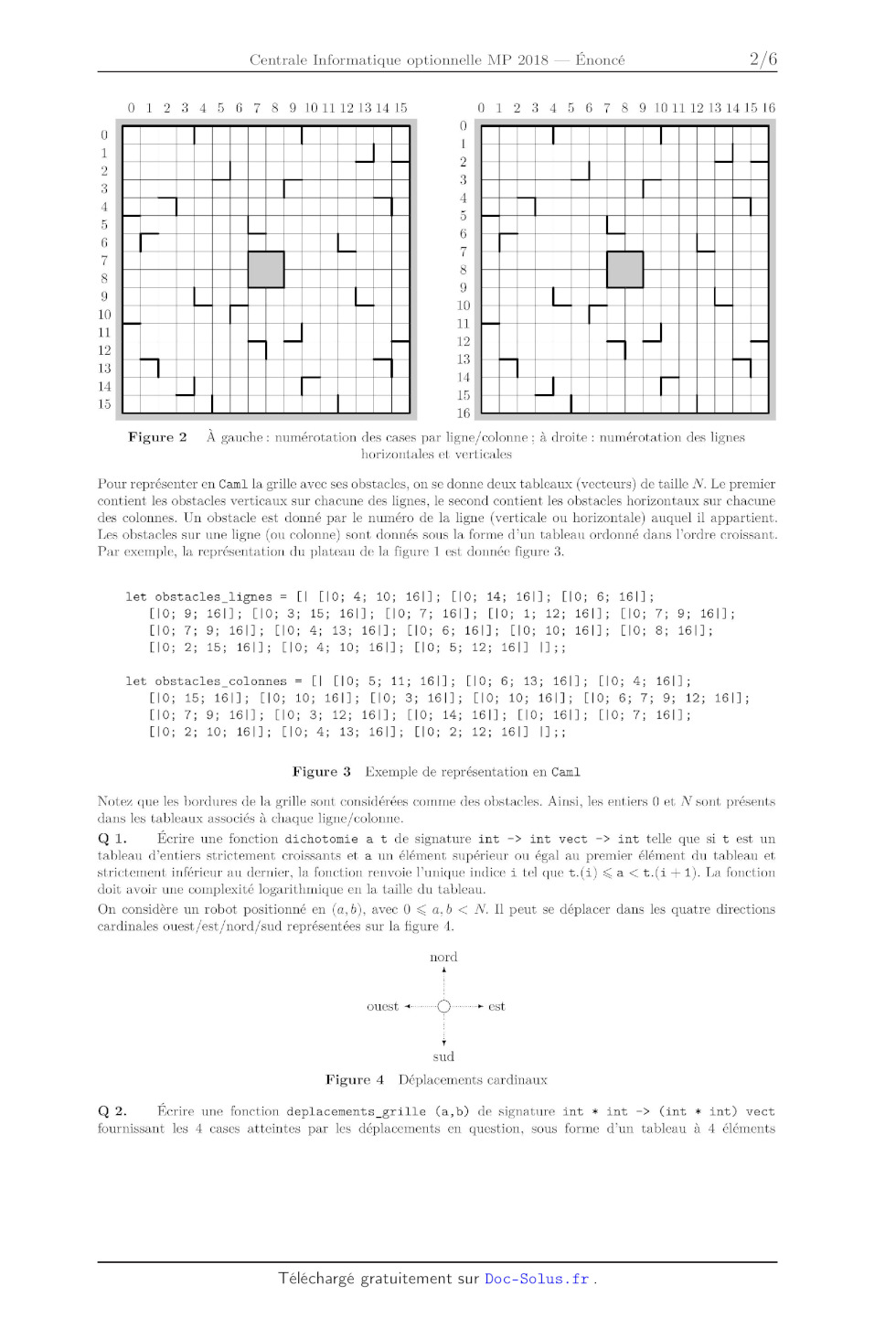
On considère pour le moment une grille sans robots du jeu Ricochet Robots.
Notons N le nombre de cases par
ligne et colonne de la grille (16 dans le jeu originel). Dans les fonctions
demandées, on supposem que N est une
variable globale. On numérote chaque case par un couple (a, b) de [[0, N --
1]]2, correspondant a la ligne a et a
la colonne b. On numérote également les lignes horizontales et verticales
séparant les cases à l'aide d'un entier
de [[0, N ], de sorte que la case (a, b) est délimitée par les lignes
horizontales a (au dessus) et a + 1 (en dessous),
de même que par les lignes verticales b (à gauche) et b + 1 (à droite) (figure
2).
2018-03--02 09:00:32 Page 1/6 @c BY--NC-SA
2 3 4 5 6 7 8 9101112131415 0 1 2 3 4 5 6 7 8 910111213141516
0
0
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9 9
10
10
11
11
12
12
13
13
14
14
15 15
16
Figure 2 A gauche : numérotation des cases par ligne/ colonne ; a droite :
numérotation des lignes
horizontales et vertica_es
Pour représenter en Caml la grille avec ses obstacles, on se donne deux
tableaux (vecteurs) de taille N. Le premier
contient les obstacles verticaux sur chacune des lignes, le second contient les
obstacles horizontaux sur chacune
des colonnes. Un obstacle est donné par le numéro de la ligne (verticale ou
horizontale) auquel il appartient.
Les obstacles sur une ligne (ou colonne) sont donnés sous la forme d'un tableau
ordonné dans l'ordre croissant.
Par exemple, la représentation du plateau de la figure 1 est donnée figure 3.
let obstacles_lignes = [| [|O; 4; 10; 16|]; UC; 14; 16|]; [|O; 6; 16|];
EIO; 9; 16l]; Elo; 3; 15; 16l]; Elo; 7; 16l]; Elo; 1; 12; 16l1; Elo; 7; 9; 16l];
Elo; 7; 9; 16l]; Elo; 4; 13; 16l]; Elo; 6; 16l]; Elo; 10; 16l]; Elo; 8; 16l];
Elo; 2; 15; 16I1; Elo; 4; 10; 16I1; Elo; 5; 12; 16I1 I];;
let obstacles_colonnes = [| [|O; 5; 11; 16l]; [IO; 6; 13; 16|]; flo; 4; 16l];
[|O;15;16|]; [|0;10;16|]; [|0;8;16|]; [|0;10;16|]; flo; 6; 7; 9; 12; 16|];
Elo; 7; 9; 16I]; El0; 3; 12; 16I]; EI0; 14; 16I1; El0; 16I1; El0; 7; 16I];
[|o; 2; 10; 16l]; Elo; 4; 13; 16l]; Elo; 2; 12; 16l] I];;
Figure 3 Exemple de représentation en Caml
Notez que les bordures de la grille sont considérées comme des obstacles.
Ainsi, les entiers () et N sont présents
dans les tableaux associés à chaque ligne / colonne.
Q 1. Écrire une fonction dichotomie a t de signature int --> int vect --> int
telle que si t est un
tableau d'entiers strictement croissants et a un élément supérieur ou égal au
premier élément du tableau et
strictement inférieur au dernier, la fonction renvoie l'unique indice 1 tel que
t.(i) < a < t.(i + 1). La fonction doit avoir une complexité logarithmique en la taille du tableau. On considère un robot positionné en (a, b), avec 0 g a, b < N. Il peut se déplacer dans les quatre directions cardinales ouest / est / nord / sud représentées sur la figure 4. nord A ouest 4 ......... O ........ ., est % sud Figure 4 Déplacements cardinaux Q 2. Écrire une fonction deplacements_gtille (a,b) de signature int * int -->
(int * int) vect
fournissant les 4 cases atteintes par les déplacements en question, sous forme
d'un tableau a 4 éléments
2018-03--02 09:00:32 Page 2/6 (cc BY--NC-SA
(Ouest / est /nord/ sud). Si le robot ne peux pas bouger dans une direction
donnée (car il est contre un obs--
tacle), on considérera que le résultat du déplacement dans cette direction est
la case (a, b) elle--même. Les deux
tableaux obstacles_lignes et obstacles_colonnes sont des variables globales.
Q 3. Écrire une fonction matrice_deplacements (), de type unit --> (int * int)
vect vect vect pro--
duisant une matrice m telle que m. (a) . (b) contienne le vecteur des
déplacements possibles pour un robot depuis
la case (a, b), et ce pour tous 0 < a, b < N. Donner la complexité de création de la matrice. On cherche maintenant à intégrer les positions d'autres robots dans le déplacement d'un robot. On utilise la fonction précédente pour créer une matrice mat_deplacements que l'on considérera comme globale. Q 4. Écrire une fonction modif t (a,b) (c,d) de signature (int * int) vect --> int * int --> int * int --> unit
telle que si t est le tableau de taille 4 donnant les déplacements ouest /est /
nord/ sud d'un robot placé en (a, b)
dans la grille ne contenant pas d'autres robots, et (c, d) la position d'un
autre robot, alors la fonction modifie
si nécessaire le tableau t en prenant en compte le robot en (c, d).
On s'intéresse maintenant au déplacement d'un robot situé en (a, b) dans la
grille, avec d'autres robots éven--
tuellement présents, dont les positions sont stockées dans une liste.
Q 5. Déduire des questions précédentes une fonction deplacements_robots (a,b) q
de signature
int * int --> (int * int) list --> (int * int) vect
donnant les déplacements ouest / est / nord / sud d'un robot situé en (a, b)
dans la grille, les positions des autres
robots étant stockées dans la liste q. On ne modifiera pas la matrice
mat_deplacements : on souhaite une copie
modifiée de mat_deplacements . (a) . (b).
Q 6. Si on suppose que la solution optimale demande au plus k mouvements, une
solution possible pour
résoudre le jeu Ricochet Robots consiste à générer toutes les suites possibles
de [{ déplacements. Avec 4 robots
en tout, estimer la complexité d'une telle approche (on utilisera la notation
0).
La suite du problème a pour objet de proposer une solution plus efficace pour
la résolution du jeu Ricochet
Robots.
II Quelques fonctions utilitaires
II.A -- Une fonction de tri
Q 7. Ecrire une fonction insertion x q de signature 'a --> 'a list --> 'a list
prenant en entrée un
élément x et une liste q triée dans l'ordre croissant, et renvoyant une liste
triée dans l'ordre croissant, constituée
des éléments de q et x.
Q 8. En déduire une fonction tri_insertion q de signature 'a list --> 'a list
permettant de trier une
liste dans l'ordre croissant.
Q 9. Rappeler la complexité de ce tri dans le pire et le meilleur cas. Que
peut--on dire de la complexité si
dans la liste q, tous les éléments excepté peut--être un sont dans l'ordre
croissant '?
II.B * Quelques fonctions sur les listes
Q 10. Écrire une fonction mem1 x q de signature 'a --> ('a * 'b) list --> bool
testant l'appartenance
d'un couple dont le premier élément est x dans la liste q.
Q 11. Écrire une fonction assoc x qde signature 'a --> ('a * 'b) list --> 'b
renvoyant, s'il existe, l'élé--
ment y du premier couple (x.y) appartenant à la liste q.
II.C * Implantation d'une structure de file
On rappelle que l'on peut facilement implanter une structure de file a l'aide
de deux listes : une des listes est
utilisée pour rajouter des éléments, l'autre pour enlever des éléments. On
définit ainsi le type
type 'a file = {mutable entree: 'a list; mutable sortie: 'a list};;
Lorsqu'on veut retirer un élément de la file alors que la deuxième liste est
vide, on remplace celle--ci par la
première, renversée.
On pourra utiliser les fonctions suivantes, qui permettent de manipuler une
file ainsi définie :
creer_file_vide : unit --> 'a file crée une file vide
est_vide_file : 'a file --> bool teste si une file est vide
enfiler : 'a file --> 'a --> unit ajoute un élément a une file
defiler : 'a file --> 'a supprime l'élément en tête de file et le renvoie
On pourra supposer dans la suite que ces fonctions sont écrites de sorte que
toute suite de p opérations
enfiler/defiler a partir d'une file vide (ne produisant pas d'erreur) se fait
en complexité O(p).
2018-03--02 09:00:32 Page 3/6 (CC) BY--NC-SA
III Tables de hachage
Dans l'optique de résoudre le problème du jeu des robots, nous allons
travailler sur un graphe dont les sommets
seront étiquetés par les positions des robots. Le nombre de sommets possibles
étant élevé, il est nécessaire
d'utiliser une structure de données adaptée pour travailler sur ce graphe. Nous
allons donc réaliser une structure
de dictionnaire permettant, en particulier, de tester facilement si un sommet a
déjà été vu ou non et d'associer
un sommet a chaque sommet découvert.
Une structure de dictionnaire est un ensemble de couples (clé,élément), les
clés (nécessairement distinctes)
appartenant à un même ensemble K, les éléments à un ensemble E. La structure
doit garantir les opérations
suivantes :
-- recherche d'un élément connaissant sa clé ;
* ajout d'un couple (clé,élément) ;
-- suppression d'un couple connaissant sa clé.
Une structure de dictionnaire peut--être réalisée à l'aide d'une table de
hachage. Cette table est implantée dans
un tableau de w listes (appelées alvéoles) de couples (clé, élément). Ce
tableau est organisé de façon a ce que la
liste d'indice i contienne tous les couples (k, 6) tels que h...(k) : i où h...
: K --> [[0, w -- 1]] s'appelle fonction de
hachage. On appelle w la largeur de la table de hachage et h...(k) le haché de
la clé k.
Ainsi pour rechercher ou supprimer l'élément de clé k, on commence par calculer
son haché qui détermine
l'alvéole adéquate et on est alors ramené à une action sur la liste
correspondante. De même pour ajouter un
nouvel élément au dictionnaire on l'ajoute à l'alvéole indiquée par le haché de
sa clé.
III.A * Une famille de fonctions h...
Nous commençons par nous doter d'une famille de fonctions h... pour les listes
de couples de [[0, N -- 1]]2. Un
hachage naturel d'une liste comportant les couples (a- b')0gi (int
* int) list --> int
calculant la quantité précédente.
III.B * Tables de hachage de largeur fimée
Dans cette sous--section, en fixe une largeur de hachage w. Un bon choix pour w
serait par exemple un nombre
premier ni trop petit, ni trop grand, comme 997. Pour les listes, on
considérerait alors la fonction de hachage
h997 donnée en Caml par hachage_liste 997. On définit en toute généralité le
type suivant :
type ('a, 'b) table_hachage = {
hache: 'a --> int;
donnees: ('a * 'b) list vect;
largeur: int};;
III.B.1) Implantation de la structure de dictionnaire
Q 13. Écrire une fonction creer_table h wde signature ('a --> int) --> int -->
('a, 'b) table_hachage
telle que creer_table h w renvoie une nouvelle table de hachage vide de largeur
w munie de la fonction de
hachage h.
Q 14. Écrire une fonction recherche t kde signature ('a, 'b) table_hachage -->
'a --> bool renvoyant
un booléen indiquant si la clé k est présente dans la table t. On pourra
utiliser les fonctions de la partie H.
Q 15. Écrire une fonction element t k de signature ('a, 'b) table_hachage -->
'a --> 'b renvoyant
l'élément e associé à la clé [EUR dans la table t, si cette clé est bien
présente dans la table.
Q 16. Écrire une fonction ajout t k ede signature ('a, 'b) table_hachage --> 'a
--> 'b --> unit ajou--
tant l'entrée (k, e) a la table de hachage t. On n'effectuera aucun changement
si la clé est déjà présente.
Q 17. Écrire enfin une fonction suppression t k de signature ('a, 'b)
table_hachage --> 'a --> unit
supprimant l'entrée de la clé k dans la table 15. On n'effectuera aucun
changement si la clé n'est pas présente.
III.B.2) Étude de la complexité de la recherche d'un élément
Nous étudions ici la complexité de la recherche d'une clé dans une table de
hachage. Dans le pire cas, toutes les
clés sont hachées vers la même alvéole, ainsi la complexité de la recherche
d'une clé dans une table de hachage
n'est pas meilleure que la recherche dans une liste. Cependant, si la fonction
de hachage hw est bien choisie, on
2018-03--02 09:00:32 Page 4/6 GC) BY--NC-SA
peut espérer que les clés vont se répartir de façon apparemment aléatoire dans
les alvéoles, ce qui donnera une
complexité bien meilleure.
Nous faisons donc ici l'hypothèse de hachage uniforme simple : pour une clé
donnée, la probabilité d'être hachée
dans l'alvéole i est 1/w, indépendante des autres clés. On note n le nombre de
clés stockées dans la table et on
appelle oz : n/w le facteur de remplissage de la table. On suppose de plus, que
le calcul du haché d'une clé se
fait en temps constant.
Q 18. On se donne une clé k non présente dans la table. Montrer que l'espérance
de la complexité de la
recherche de [EUR dans la table est un O(1 + oz).
Q 19. On prend au hasard une clé présente dans la table ; toutes les clés sont
équiprobables. Montrer qu'alors
la recherche de la clé se fait en O(1 + 04), en moyenne sur toutes les clés
présentes.
111.0 + Tables de hachage dynamique
Les deux questions précédentes montrent que l'on peut assurer une complexité
moyenne constante pour la
recherche dans une table de hachage, sous réserve que le facteur de remplissage
oz soit borné. Il en va de même
des opérations d'insertion et de suppression, pour peu que les clés a ajouter /
supprimer vérifient des hypothèses
d'indépendance. Bien souvent, et cela va être le cas dans notre problème, on ne
sait pas a l'avance quel sera le
nombre de clés à stocker dans la table, et on préfère ne pas surestimer ce
nombre pour garder un espace mémoire
linéaire en le nombre de clés stockées. Ainsi, il est utile de faire varier la
largeur U) de la table de hachage : si le
facteur de remplissage devient trop important, on réarrange la table sur une
largeur plus grande (de même, on
peut réduire la largeur de la table lorsque le facteur de remplissage devient
petit). On parle alors de tables de
hachage dynamiques pour ces tables à largeur variable.
À une table de hachage dynamique est associée une famille de fonctions de
hachage (h...). Par exemple, pour les
listes de couples de [[O, N -- 1]]2, la fonction hachage_liste précédemment
écrite fournit une telle famille. On
définit en toute généralité le type suivant :
type ('a, 'b) table_dyn = {
hache: int --> 'a --> int;
mutable taille: int;
mutable donnees: ('a * 'b) list vect;
mutable largeur: int};;
On notera trois différences par rapport au type précédent :
+ la fonction hache possède un paramètre supplémentaire qui est la largeur de
hachage, elle correspond main--
tenant a la famille de fonctions de hachage (hw) ;
+ on a rendu les champs donnees et largeur modifiables ;
-- un champ taille (modifiable) est rajouté, il doit a tout moment contenir le
nombre de clés présentes dans
la table.
Q 20. Écrire une fonction creer_table_dyn h permettant de créer une table de
hachage dynamique initia--
lement vide, avec la famille de fonctions de hachage h et la largeur initiale 1.
On admet avoir écrit deux fonctions recherche_dyn t k et element_dyn t k,
variantes des fonctions recherche
et element précédentes, basées sur le même principe. On va maintenant
développer une stratégie pour maintenir
à tout moment un facteur de remplissage borné.
Q 21. Écrire une fonction rearrange_dyn 1: W2 prenant en entrée une table de
hachage dynamique et une
nouvelle largeur de hachage w2, qui réarrange la table sur une largeur w2. En
supposant que le calcul des valeurs
de hachage se fasse en temps constant, la complexité doit être en O(n + 0; +
tu?) où n est le nombre de clés
présentes dans la table (sa taille), il; est l'ancienne largeur de la table,
1112 la nouvelle.
Une stratégie heuristique simple pour garantir que le facteur de remplissage
reste borné, tout en garantissant
une bonne répartition des clés dans le cas des listes de couples à valeurs dans
[[0, N -- 1]] avec N : 16, est
d'utiliser les puissances de 3 comme largeurs de hachage. Après ajout d'un
élément à la table, si celle--ci est de
taille strictement supérieure a trois fois sa largeur w, on la réarrange sur
une largeur w' : 310.
Q 22. Écrire une fonction aj out_dyn t k e ajoutant le couple (k, e) a la table
de hachage (si la clé k n'est
pas présente), en réarrangeant si nécessaire la table, en suivant le principe
ci--dessus.
Dans l'hypothèse que chaque ajout se fait en temps O(1 + oz), où oz est le
facteur de remplissage de la table, on
peut montrer qu'une série de p ajouts dans une table initialement vide prend un
temps O(p).
On pourrait écrire de même une fonction de suppression dynamique, de sorte de
maintenir un facteur de
remplissage de la table borné, et qu'une série de p opérations licites
d'insertion/suppression dans la table
prenne un temps O(p).
2018-03--02 09:00:32 Page 5/6 GC) BY--NC-SA
IV Résolution du jeu des robots
IV.A * Graphe orienté associé au jeu des robots
La résolution du jeu des robots peut se faire en traduisant le problème sous
forme d'un graphe dans lequel
chaque sommet représente une position des robots sur le plateau de jeu. On
distingue le « robot principal »
(celui que l'on veut amener sur une case donnée) et les autres robots. Ainsi,
un sommet est représenté par le
type suivant :
type sommet = {robot: int * int; autres_robots: (int * int) list};;
Pour chaque sommet, on impose que la liste autres_robots soit triée dans
l'ordre croissant en suivant l'ordre
lexicographique (l'ordre naturel pour les couples en Caml). Cet ordre est
défini par (a, b) < (of, b') si a < a' ou si a : a' et b { b'. Par exemple, Caml évalue l'expression (2,3) < (3,0) en true. Les arcs dans le graphe (orienté) sont définis naturellement : un sommet s est relié a un sommet s' si on peut passer de s a s' par un mouvement licite d'un des robots. Q 23. Avec p robots en tout sur un plateau de taille N >< N, quel est le nombre possible de sommets '? Donner le nombre exact pour p : 4 et N : 16. Q 24. Écrire une fonction sommets_accessibles s de type sommet --> sommet list
prenant en entrée un
sommet et renvoyant la liste des sommets accessibles via s a partir du
déplacement d'un des robots. S'il y a p
robots en tout, la fonction renverra une liste de 4p sommets, certains sommets
pouvant être égaux au sommet
s : ils correspondent au mouvement d'un robot dans une direction où il est
bloqué.
I V.B * Parcours en largeur : étude théorique
On se donne un graphe G = (S, A) orienté, S dénote l'ensemble des sommets et A
l'ensemble des arcs. On se
donne un sommet 50 EUR S du graphe et on considère l'algorithme 1 (parcours en
largeur).
Entrées : un arbre G = (S, A), orienté, un sommet de départ 50
Sortie : un tableau de booléens, un tableau de prédecesseurs
F <-- creer_file_vide( ) ; Enfiler 50 dans F ; bs0 % vrai ; bs <-- faux pour tout 5 EUR S ; (* un tableau de booléens pour chaque sommet, tous faux >k)
7rs <-- 5 pour tout 5 E S ; ("< un tableau de prédecesseurs pour chaque sommet, initialement als] : s >'<) tant que F est non vide faire 5 <-- defiler(F) ; pour tout s' voisin de 5 tel que bs, est faux faire bS, % vrai ; 7rS, <-- 5 ; enfiler s' dans F; fin pour fin tant que renvoyer b, 7r Algorithme 1 Parcours en largeur Q 25. Montrer que l'algorithme termine. Q 26. Montrer que l'algorithme visite tous les sommets s du graphe pour lesquels il existe un chemin de s() a 5. Q 27. Pour un sommet s visité par l'algorithme (c'est--à--dire tel que b5 soit Vrai a la fin de l'algorithme), expliquer à partir de 7r comment retrouver un chemin de so a 5. Q 28. Montrer que ce chemin est un plus court chemin de s() a 5. Q 29. On suppose que les voisins sont implantés par liste d'adjacence, la complexité est linéaire en le nombre de voisins pour les parcourir. Les opérations de file et les opérations sur les tableaux 7r et b s'effectuent en temps constant, donner la complexité de l'algorithme en fonction de |S | et |A|. Un parcours en largeur du graphe associé au jeu permet donc de trouver une solution qui nécessite le minimum de déplacements des robots. La difl'iculté dans l'implantation de cet algorithme réside dans le grand nombre de sommets du graphe. Pour pallier cette difiîculté, on remplace les tableauoe b et 7r par un dictionnaire implanté dans une table de hachage dynamique. Les clés et les éléments du dictionnaires sont tous les deurr des sommets du graphe tels que l'élément associé à la clé 5 soit 7rs. On remplace ainsi le test de bs, par l'emistence de la clé 5] dans le dictionnaire. oooFlNooo 2018--03--02 09:00:32 Page 6/6 («à BY--NC-SA