
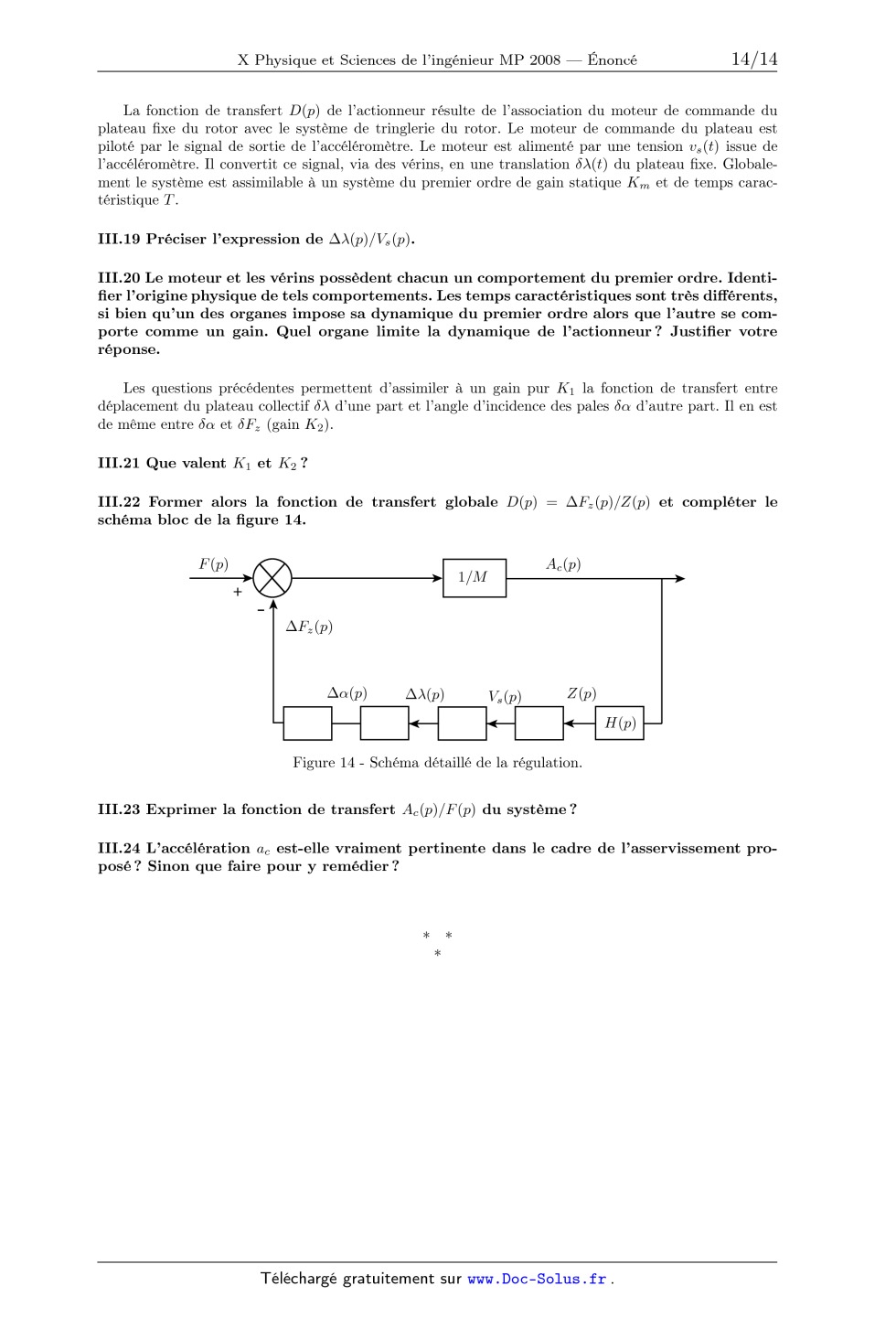
X Physique et Sciences de l'ingénieur MP 2008
| Thème de l'épreuve | Étude de quelques aspects de l'hélicoptère |
| Principaux outils utilisés | mécanique du point et du solide |
| Mots clefs | portance, traînée, accéléromètre, hélicoptère, pale, rotor, aéronef, sustentation, torseur, asservissement |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
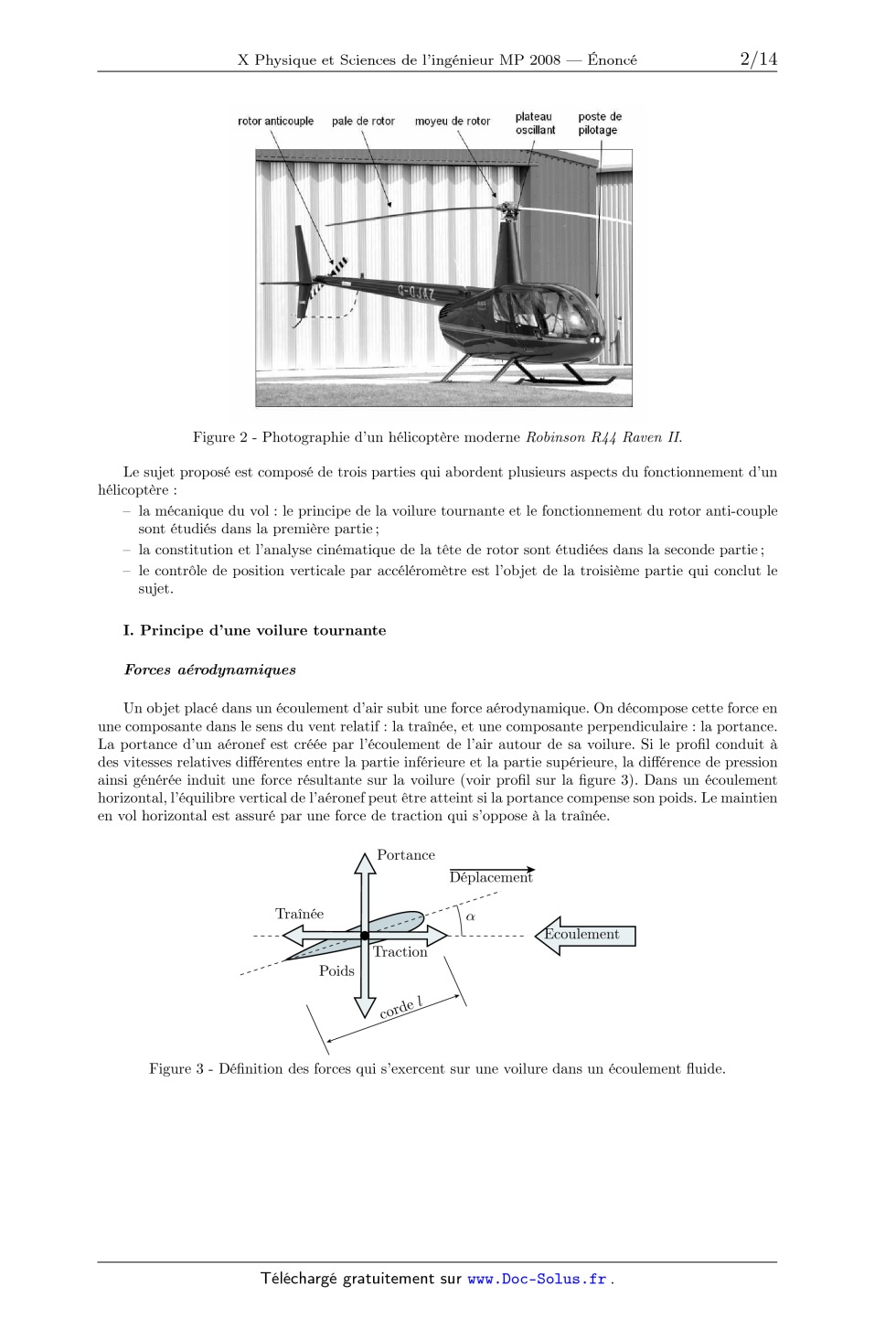
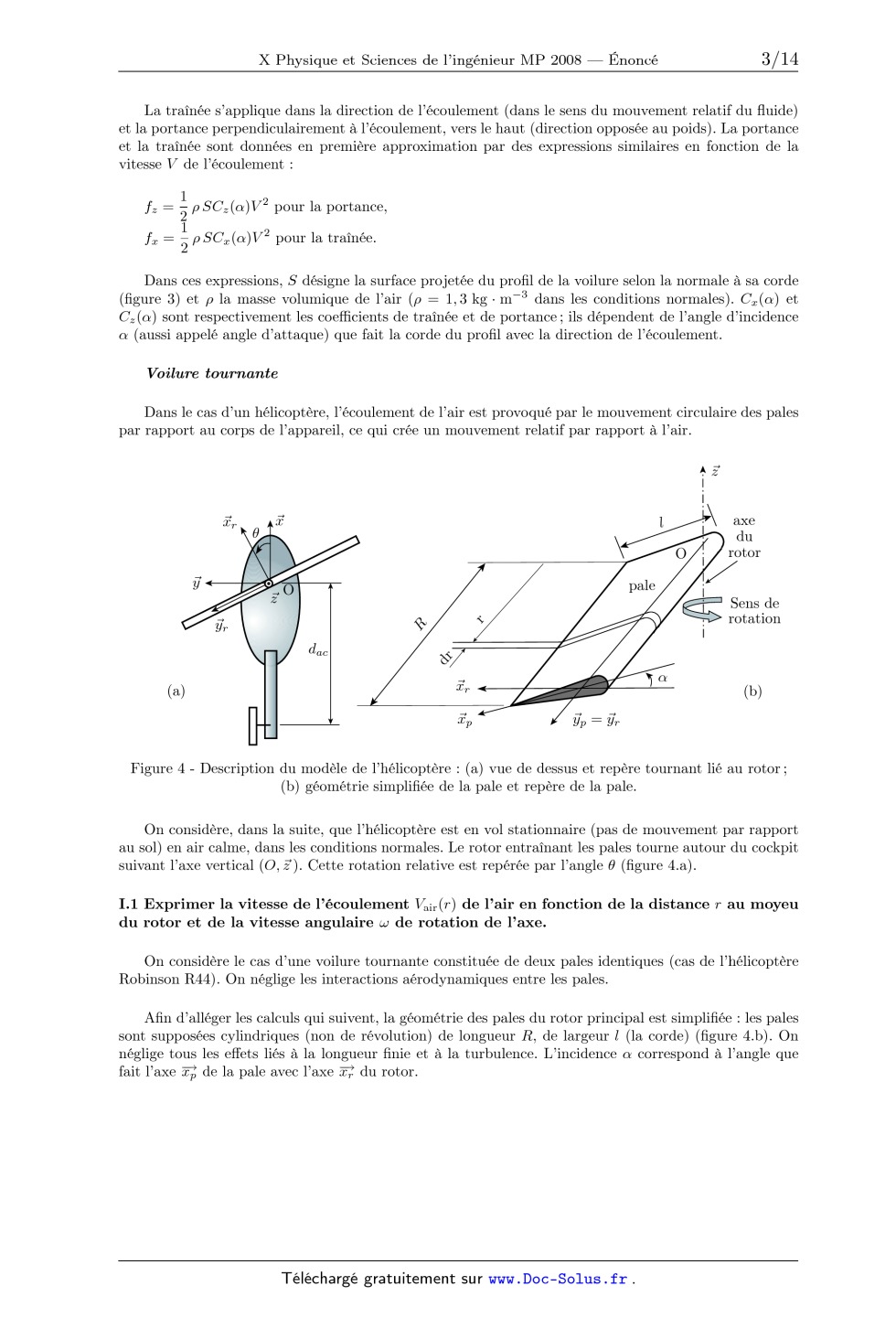
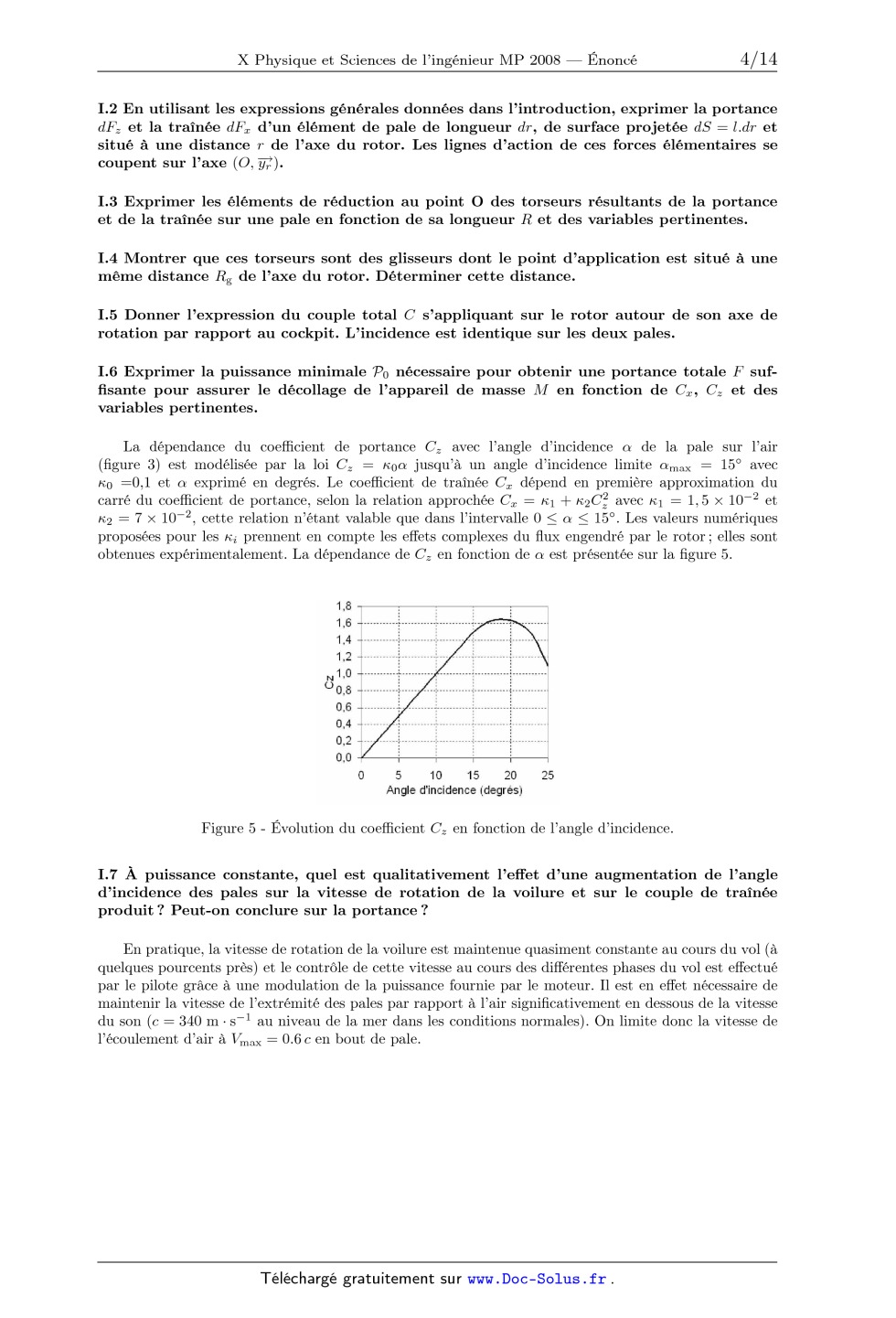
ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l'Ingénieur CONCOURS D'ADMISSION 2008 COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGÉNIEUR (Durée : 4 heures) L'utilisation des calculatrices est autorisée pour cette épreuve. Étude de quelques aspects de l'hélicoptère C'est en novembre 1907 que le premier véritable décollage au monde d'un hélicoptère à plus de 1,50 mètre du sol est réussi, à Coquainvilliers, près de Lisieux (Normandie), il y a donc un peu plus de 100 ans. Cet engin à double rotor de 203 kilos (figure 1) est piloté par son jeune inventeur et constructeur, Paul Cornu, alors âgé de 26 ans. Le moteur entraînant les rotors est un Antoinette de 24 CV (1 CV = 736 W). D'autres essais significatifs d'hélicoptères emportant un homme sont réalisés la même année par Louis Breguet et Charles Richet à Douai. Figure 1 - La machine de Paul Cornu (1907). Un hélicoptère est un aéronef à voilure tournante dont la sustentation et la propulsion sont assurées simultanément par le ou les rotors pendant toutes les phases du vol. L'hélicoptère peut effectuer un vol stationnaire et permet ainsi des missions inaccessibles à la plupart des autres aéronefs. Un hélicoptère moderne de type Robinson R44 est présenté page suivante sur la figure 2. 1 Figure 2 - Photographie d'un hélicoptère moderne Robinson R44 Raven II. Le sujet proposé est composé de trois parties qui abordent plusieurs aspects du fonctionnement d'un hélicoptère : la mécanique du vol : le principe de la voilure tournante et le fonctionnement du rotor anti-couple sont étudiés dans la première partie ; la constitution et l'analyse cinématique de la tête de rotor sont étudiées dans la seconde partie ; le contrôle de position verticale par accéléromètre est l'objet de la troisième partie qui conclut le sujet. I. Principe d'une voilure tournante Forces aérodynamiques Un objet placé dans un écoulement d'air subit une force aérodynamique. On décompose cette force en une composante dans le sens du vent relatif : la traînée, et une composante perpendiculaire : la portance. La portance d'un aéronef est créée par l'écoulement de l'air autour de sa voilure. Si le profil conduit à des vitesses relatives différentes entre la partie inférieure et la partie supérieure, la différence de pression ainsi générée induit une force résultante sur la voilure (voir profil sur la figure 3). Dans un écoulement horizontal, l'équilibre vertical de l'aéronef peut être atteint si la portance compense son poids. Le maintien en vol horizontal est assuré par une force de traction qui s'oppose à la traînée. Portance Déplacement Traînée Ecoulement Traction Poids el co r d Figure 3 - Définition des forces qui s'exercent sur une voilure dans un écoulement fluide. 2 La traînée s'applique dans la direction de l'écoulement (dans le sens du mouvement relatif du fluide) et la portance perpendiculairement à l'écoulement, vers le haut (direction opposée au poids). La portance et la traînée sont données en première approximation par des expressions similaires en fonction de la vitesse V de l'écoulement : 1 SCz ()V 2 pour la portance, 2 1 fx = SCx ()V 2 pour la traînée. 2 fz = Dans ces expressions, S désigne la surface projetée du profil de la voilure selon la normale à sa corde (figure 3) et la masse volumique de l'air ( = 1, 3 kg · m-3 dans les conditions normales). Cx () et Cz () sont respectivement les coefficients de traînée et de portance ; ils dépendent de l'angle d'incidence (aussi appelé angle d'attaque) que fait la corde du profil avec la direction de l'écoulement. Voilure tournante Dans le cas d'un hélicoptère, l'écoulement de l'air est provoqué par le mouvement circulaire des pales par rapport au corps de l'appareil, ce qui crée un mouvement relatif par rapport à l'air. ~z ~xr ~x l O pale O R ~yr dac (a) Sens de rotation r ~z dr ~y axe du rotor ~xr ~xp (b) ~yp = ~yr Figure 4 - Description du modèle de l'hélicoptère : (a) vue de dessus et repère tournant lié au rotor ; (b) géométrie simplifiée de la pale et repère de la pale. On considère, dans la suite, que l'hélicoptère est en vol stationnaire (pas de mouvement par rapport au sol) en air calme, dans les conditions normales. Le rotor entraînant les pales tourne autour du cockpit suivant l'axe vertical (O, ~z ). Cette rotation relative est repérée par l'angle (figure 4.a). I.1 Exprimer la vitesse de l'écoulement Vair (r) de l'air en fonction de la distance r au moyeu du rotor et de la vitesse angulaire de rotation de l'axe. On considère le cas d'une voilure tournante constituée de deux pales identiques (cas de l'hélicoptère Robinson R44). On néglige les interactions aérodynamiques entre les pales. Afin d'alléger les calculs qui suivent, la géométrie des pales du rotor principal est simplifiée : les pales sont supposées cylindriques (non de révolution) de longueur R, de largeur l (la corde) (figure 4.b). On néglige tous les effets liés à la longueur finie et à la turbulence. L'incidence correspond à l'angle que - fait l'axe - x p de la pale avec l'axe xr du rotor. 3 I.2 En utilisant les expressions générales données dans l'introduction, exprimer la portance dFz et la traînée dFx d'un élément de pale de longueur dr, de surface projetée dS = l.dr et situé à une distance r de l'axe du rotor. Les lignes d'action de ces forces élémentaires se coupent sur l'axe (O, - y r ). I.3 Exprimer les éléments de réduction au point O des torseurs résultants de la portance et de la traînée sur une pale en fonction de sa longueur R et des variables pertinentes. I.4 Montrer que ces torseurs sont des glisseurs dont le point d'application est situé à une même distance Rg de l'axe du rotor. Déterminer cette distance. I.5 Donner l'expression du couple total C s'appliquant sur le rotor autour de son axe de rotation par rapport au cockpit. L'incidence est identique sur les deux pales. I.6 Exprimer la puissance minimale P0 nécessaire pour obtenir une portance totale F suffisante pour assurer le décollage de l'appareil de masse M en fonction de Cx , Cz et des variables pertinentes. La dépendance du coefficient de portance Cz avec l'angle d'incidence de la pale sur l'air (figure 3) est modélisée par la loi Cz = 0 jusqu'à un angle d'incidence limite max = 15 avec 0 =0,1 et exprimé en degrés. Le coefficient de traînée Cx dépend en première approximation du carré du coefficient de portance, selon la relation approchée Cx = 1 + 2 Cz2 avec 1 = 1, 5 × 10-2 et 2 = 7 × 10-2 , cette relation n'étant valable que dans l'intervalle 0 15 . Les valeurs numériques proposées pour les i prennent en compte les effets complexes du flux engendré par le rotor ; elles sont obtenues expérimentalement. La dépendance de Cz en fonction de est présentée sur la figure 5. Figure 5 - Évolution du coefficient Cz en fonction de l'angle d'incidence. I.7 À puissance constante, quel est qualitativement l'effet d'une augmentation de l'angle d'incidence des pales sur la vitesse de rotation de la voilure et sur le couple de traînée produit ? Peut-on conclure sur la portance ? En pratique, la vitesse de rotation de la voilure est maintenue quasiment constante au cours du vol (à quelques pourcents près) et le contrôle de cette vitesse au cours des différentes phases du vol est effectué par le pilote grâce à une modulation de la puissance fournie par le moteur. Il est en effet nécessaire de maintenir la vitesse de l'extrémité des pales par rapport à l'air significativement en dessous de la vitesse du son (c = 340 m · s-1 au niveau de la mer dans les conditions normales). On limite donc la vitesse de l'écoulement d'air à Vmax = 0.6 c en bout de pale. 4 I.8 Exprimer la vitesse angulaire maximale max utilisable en fonction de la longueur R de la pale et de c, pour rester dans le domaine de sécurité. La calculer numériquement pour R = 5 m. On suppose maintenant que le rotor est entraîné à vitesse constante à sa vitesse angulaire limite max , et que l'hélicoptère est initialement posé au sol avec un angle d'incidence des pales = 0 . La masse totale de l'hélicoptère est M = 1300 kg et le rotor possède deux pales de longueur R = 5 m, de largeur l = 26 cm. I.9 Exprimer la puissance délivrée par le moteur dans cette configuration. La calculer numériquement. Le pilote actionne maintenant la commande dite « de pas collectif » qui augmente l'angle d'incidence des pales, tout en maintenant la vitesse du rotor constante à max grâce à l'ajustement de la puissance fournie par le moteur. I.10 Pour quelle valeur de l'angle d'incidence dec l'hélicoptère va-t-il quitter le sol ? La calculer numériquement, en prenant pour intensité du champ de pesanteur g = 9, 8 m · s-2 . I.11 Calculer en kW puis en CV, la puissance développée par le moteur au moment du décollage. I.12 Le rapport puissance/masse des moteurs d'aviation récents atteint environ 2 CV/kg. Expliquer brièvement pourquoi la motorisation a été pendant longtemps la limitation principale des hélicoptères. En pratique, les pales du rotor principal sont légèrement vrillées par construction ; l'angle d'incidence est de la forme (r) = 1 - r/R, où 1 est la partie variable sur laquelle agit le pilote, et un vrillage obtenu par construction. I.13 Donner un encadrement portant sur 1 et assurant qu'aucun point de la pale n'offre une incidence négative ou excédant l'angle d'incidence limite max . I.14 Exprimer les éléments de réduction au point O du torseur résultant de la portance d'une pale vrillée. I.15 Donner l'angle d'incidence eq d'une pale non vrillée générant la même portance que la pale vrillée de paramètres (1 , ). Montrer que cet angle doit respecter la condition eq /4. I.16 Évaluer la distance R au centre de rotation du rotor à laquelle s'applique effectivement la portance Fz dans le cas d'une pale vrillée. Exprimer R /Rg en fonction de /eq . Justifier succinctement l'intérêt du vrillage des pales. I.17 Calculer maintenant le couple de traînée de l'hélice C dans le cadre d'une voilure vrillée. Soit C(eq ) le couple de traînée d'une hélice non vrillée pour = eq . Montrer que le rapport C /C(eq ) vaut : 1+ ã Å 720 2 24 - eq 240Cxeq 7 avec Cxeq à identifier. Peut-on définir un angle opt pour un vrillage optimal en ce qui concerne la traînée ? 5 Rotor anticouple Dans la suite de l'énoncé, on considère le cas des pales non vrillées. L'application du couple fourni par le moteur sur l'axe du rotor de l'hélicoptère produit en retour un couple opposé qui tend à faire tourner le corps de l'hélicoptère en sens inverse du rotor. Pour contrer cet effet, plusieurs techniques existent, la plus courante étant d'utiliser un second rotor monté dans un plan vertical à l'extrémité de la queue de l'appareil et dont la portance est cette fois dans un plan horizontal (figure 6). On se place toujours dans le cas du vol stationnaire. Figure 6 - Rotor anticouple d'un hélicoptère Robinson R44. I.18 Lors d'une augmentation de l'angle d'attaque des pales du rotor principal (action du pilote sur le pas collectif ) d'un angle à un angle = + (où l'angle est petit) exprimer la variation C du couple fourni par le moteur. On supposera constante lors de la variation. L'axe du rotor de queue est situé à une distance d de l'axe du rotor principal, et est équipé de deux pales de longueur Rac . La portance et la traînée de ce rotor sont données par les mêmes expressions que pour le rotor principal. Comme pour ce dernier, la vitesse angulaire du rotor anticouple est constante au cours du vol et proportionnelle à celle du rotor principal selon ac = . Seul change l'angle d'attaque des pales, commandé par le pilote grâce aux palonniers (pédales). On néglige toute interaction aérodynamique entre les deux rotors et entre les pales elles-mêmes. Les dimensions des pales du rotor anticouple sont : Rac = 80 cm, lac = 10 cm, avec les mêmes notations que sur la figure 4.b. Le centre du rotor anticouple est situé à une distance horizontale dac = 6 m de l'axe du rotor principal (figure 4.a). I.19 Donner la vitesse angulaire de rotation du rotor anticouple pour obtenir une vitesse d'écoulement de l'air Vair = 0, 6 c en bout de pale. La calculer numériquement et en déduire la valeur du rapport de vitesses angulaires . I.20 Pour une variation d'angle d'incidence du rotor principal, calculer la variation correspondante ac de l'angle d'incidence des pales du rotor anticouple pour conserver la direction initiale du corps de l'appareil. I.21 Est-il nécessaire de modifier l'angle d'incidence des pales du rotor anticouple lors d'une accélération horizontale de l'appareil ? 6 II. Tête de rotor Le pilote d'un hélicoptère possède 3 systèmes principaux de commandes, le levier de pas général (ou collectif), le levier de pas cyclique (manche), et les palonniers (pédales). Le « collectif » contrôle l'angle d'incidence commun de toutes les pales par l'intermédiaire des plateaux fixe et mobile, ce qui modfie la portance générée par le rotor. Le manche contrôle le pas cyclique qui introduit, par l'intermédiaire des mêmes plateaux, une action différenciée sur l'angle d'incidence de chaque pale. Figure 7 - Vues de la tête du rotor principal d'un hélicoptère Robinson R44. Les illustrations de la figure 7 présentent le mécanisme du rotor principal d'un hélicoptère. On peut y distinguer les pièces principales suivantes : Une pale (1), capable de pivoter autour d'un axe orthogonal à celui du rotor. Une biellette (2), chargée de transmettre le mouvement du plateau mobile (6) à la pale. Une biellette de commande (3), permettant de soulever ou d'incliner le plateau fixe (5). Le compas mobile (4) qui solidarise l'axe du rotor avec le plateau mobile (6). Le plateau dit fixe (5), pouvant monter et descendre, ainsi que pivoter autour d'axes uniquement orthogonaux à celui du rotor. Il transmet le mouvement des biellettes de commande au plateau mobile. Le plateau mobile (6) possède, en plus des mouvements du plateau fixe, la capacité de tourner sur lui-même, puisqu'il est entraîné par l'axe du rotor par l'intermédiaire du compas mobile. Il repose sur le plateau fixe (articulation avec roulements). Le plateau mobile est chargé de donner une inclinaison (variable ou non) aux pales, en agissant sur les biellettes. Le but de cette partie est d'identifier, à partir d'une solution existante, la cinématique permettant le réglage du pas collectif puis du pas cyclique. 7 Pivot (0, ~z) Cockpit Rotor L1 (, , ) L2 Pivot (0, ~yr ) Plateau Fixe Pale Pivot (A, ~zf ) L3 Plateau Mobile Figure 8 - Graphe de liaison du rotor. Au cockpit (figure 4.a), solide de référence, est associé le repère R := (O ; ~x, ~y , ~z ). Le point O désigne un point situé sur l'axe de révolution du rotor. Le rotor est en rotation par rapport au cockpit autour de l'axe vertical (O, ~z ). L'angle mesure r , - l'orientation relative du repère Rr := (O ; - x y z ) lié au rotor et de R. r,~ - - Le repère Rp := (O ; - x p , yr , zp ) est associé à une pale qui ne peut que pivoter d'un angle autour - de (O, yr ) par rapport au rotor. Pale et rotor sont tous deux en liaison avec le plateau mobile auquel est lié le repère - - - Rm := (A ; x z et commun aux deux plateaux, fixe et m , ym , zf ), A étant un point porté par l'axe ~ mobile (figure 9). La liaison L3 entre la pale et le plateau mobile fera l'objet d'une étude détaillée. La liaison L2 entre le rotor et le plateau mobile possède plusieurs degrés de liberté dont une translation suivant (O, ~z ) repérée - - par . Ce plateau mobile est articulé au plateau fixe, repère associé Rf := (A ; - x f , y1 , zf ), par une liaison - pivot. Ce degré de liberté est paramétré par , angle de rotation autour de l'axe (A, z f ). Le plateau fixe peut se translater dans la direction (O, ~z ) (la même translation que le plateau mobile) - et pivoter dans deux directions par rapport au cockpit. Le paramètre (OA = ( - L)~z ) repère la ~ (A, Rf /R) ~z = ~0 tandis que et repèrent les deux rotations qui sont translation qui est telle que V - telles que (Rf /R) · ~z = 0. · Liaison L1 : Plateau fixe - Cockpit C'est par cette liaison que se fait la commande. Elle doit donc faire apparaître clairement la possibilité de régler le pas collectif (inclinaison identique et constante des pales sur un tour de rotor) et le pas cyclique (variation différenciée en fonction de de l'angle d'incidence des pales). Cette liaison, réalisée à partir de biellettes, permet d'obtenir une translation suivant l'axe du rotor ainsi que deux rotations suivant des axes orthogonaux à ce dernier. 8 II.1 Exprimer les éléments de réduction du torseur cinématique de cette liaison. S'agit-il d'une liaison normalisée ? Dans le cas négatif, proposer une association de liaisons simples pour la réaliser. II.2 Parmi les degrés de liberté de la liaison L1 , préciser ceux qui sont associés au réglage du pas collectif et ceux qui interviennent dans celui du pas cyclique. · Liaison Plateau mobile - Plateau fixe II.3 Dégager la fonction principale de la liaison entre les deux plateaux dans la cinématique globale. · Liaison L3 : Pale(s) - Plateau mobile L'étude de cette liaison complexe peut se décomposer simplement en analysant, un à un, l'effet des degrés de liberté de commande. On vérifie d'abord la conséquence d'une translation du plateau fixe (donc du plateau mobile) en l'absence de toute rotation : 0. Le schéma cinématique de la figure 10 précise alors le comportement du système. ~y1 ~xr ~y ~yr ~xp ~x1 ~zp ~xr ~x ~z ~xf ~yr ~x1 ~ym ~y1 ~zf ~xm ~y1 ~z ~zf ~z ~xf Figure 9 - Définition des rotations des différents repères. - La translation du plateau mobile par rapport au rotor est repérée par (t) tel que OA = ( - L)~z. - - La biellette d'extrémités B et C, de longueur L, est initialement excentrée de la valeur e = ||AB|| = ||OC||. - - L'orientation relative de la pale est fournie par l'angle (t) = ( xr , xp ). II.4 Établir la loi de levée /L = f () où = e/L. Représenter graphiquement son évolution pour différentes valeurs de . 9 ~zp ~z C ~xr O ~xp e L B A Figure 10 - Translation du plateau mobile. II.5. Montrer que l'on peut simplifier la relation précédente pour aboutir à une linéarisation de la loi de commande lorsque reste faible. On bloque maintenant la translation ( 0), mais on incline le plateau fixe d'un angle = 0 (valeur constante non nulle) autour d'un axe ~y1 positionné par l'angle qui est constant. On étudie, dans cette configuration, l'effet de la rotation d'angle . II.6 Quelle est qualitativement la nature du mouvement du plateau mobile par rapport au rotor ? Quelle est l'amplitude angulaire de la rotation relative dans la liaison L2 ? II.7 En première approximation = lorsque 0 reste modéré. Montrer que tout se passe comme si l'on imposait une translation verticale sinusoïdale au point B. Vérifier que son amplitude s'obtient facilement à l'aide de 0 et e. Pour quelle valeur particulière de passet-on par un extremum de cette translation ? II.8 Donner finalement la loi = g (0 , ) donnant l'évolution de l'incidence d'une pale au cours d'une révolution complète du rotor. III. Contrôle d'accélération et régulation en vol stationnaire vertical Si l'on souhaite maintenir l'hélicoptère en vol stationnaire vertical, il est nécessaire, dans un premier temps, de pouvoir détecter les perturbations dues à la turbulence atmosphérique, de manière à générer une réponse appropriée. C'est donc par l'étude d'un accéléromètre (de type capacitif) que débute cette étude avant de se pencher sur son intégration dans une boucle de contrôle. · Principe général L'objectif est ici de montrer que la mesure d'une accélération peut se ramener à celle d'un déplacement, grandeur bien plus accessible expérimentalement. C'est par l'intermédiaire d'un système mécanique "Masse-ressort-amortisseur" que s'effectue ce lien. 10 On considére une masse m liée à une armature extérieure par un ressort de raideur k et un amortisseur de coefficient visqueux µ, disposés verticalement (figure 11) ; seuls les déplacements selon Oz sont envisagés. ~uz ~z m ~z µ k Figure 11 - Structure mécanique du capteur. On suppose galiléen le référentiel terrestre Rg auquel on associe la direction ascendante ~z. Pour simplifier l'écriture du problème, dans la suite on utilise - uz , vecteur unitaire associé à R, et dirigé - suivant la verticale descendante : uz -~z. Le boitier contenant le capteur est supposé ne subir qu'un déplacement vertical si bien que le référentiel R lié au capteur est en translation par rapport à Rg . Á ce c = -ac - titre - a uz désigne l'accélération d'entraînement de R par rapport à Rg , alors que l'accélération de la pesanteur s'écrit ~g = g - uz . En l'absence d'accélération du capteur (ac = 0), la masse possède une position d'équilibre ; c'est par rapport à cette position que l'on repère son déplacement par z - uz , z étant algébrique et compté positivement dans le sens de la verticale descendante. On adoptera les valeurs numériques suivantes : k = 38, 6 N · m-1 , µ = 0, 15 N · s · m-1 et m = 96 mg. III.1 Établir l'équation différentielle vérifiée par la cote z en faisant intervenir ac , m, k et µ. III.2 Donner la fonction de transfert mécanique liant les transformées de Laplace de la cote z et de l'accélération ac , H(p) = Z(p)/Ac (p). III.3 Mettre la fonction de transfert sous forme canonique. En calculer numériquement les paramètres. III.4 Représenter le diagramme de Bode de la fonction de transfert H(p). III.5 Quelle est la nature du filtre mécanique ainsi obtenu ? · Structure capacitive de l'accéléromètre et couplage électromécanique Le capteur est constitué d'une armature contenant une électrode oscillante (partie mécanique mobile étudiée précédemment) réalisée dans un matériau conducteur. Les faces supérieure et inférieure de l'armature constituent des électrodes reliées à des générateurs de tensions respectives v1 et v2 (figure 12). L'électrode centrale est maintenue à un potentiel nul, par l'intermédiaire d'un circuit à amplificateur opérationnel permettant, à travers les variations de charge, une mesure indirecte du déplacement z. 11 électrode 1 C1 +z électrode centrale C2 v1 -z électrode 2 vo v2 vs (t) vs (t) = Ks q(t) Figure 12 - Structure électrostatique du capteur. L'association de l'électrode 1 et de l'électrode centrale se comporte comme un condensateur de capacité variable C1 dont la variation est directement reliée au déplacement de l'électrode. Idem pour l'ensemble électrode 2 et l'électrode centrale. À l'équilibre, l'intervalle entre électrodes est identique et noté ; hors équilibre ces intervalles deviennent + z et - z. Les armatures possèdent la même surface S, si bien qu'à l'équilibre C1 et C2 ont une valeur identique C0 . On adoptera les valeurs numériques suivantes : S = 16 cm2 et = 100 µm. 1 On note 0 = × 10-9 F·m-1 la permittivité du vide. L'air sera assimilé à du vide pour le calcul 36 des capacités. III.6 Donner l'expression de la capacité "d'équilibre" C0 . La calculer numériquement. III.7 Déterminer C1 et C2 dans le cas général, puis C = C2 -C1 . Quelle est alors l'expression de la charge q sur l'électrode centrale dans le cas où v2 = -v1 ? III.8 Pour de faibles déplacements, donner l'expression linéarisée de C fonction de z. Faire l'application numérique pour un déplacement de l'ordre du micromètre. Préciser dans ce cas le lien entre q et z. III.9 Que se passe-t-il lorsque l'électrode centrale s'écarte significativement de sa position d'équilibre ? On suppose pour la suite que le signal issu de l'électrode centrale est l'entrée d'un montage convertisseur permettant d'obtenir une tension de sortie vs (t) proportionnelle à la charge q(t) dans la gamme de fréquence de travail ; la fonction de transfert est globalement Vs (p)/Z(p) = Ks . Il faut maintenant prendre en compte les effets électrostatiques sur la dynamique de l'électrode - centrale. On définit alors Fi , la force électrostatique, nécessairement dirigée selon - uz , de l'électrode i sur l'électrode centrale. On note vi la tension d'alimentation de l'électrode i. III.10 Donner l'expression de l'énergie électrostatique Wei stockée par le condensateur i puis celle de l'énergie totale Wel . - III.11 La force électrostatique Fel qui s'exerce sur l'électrode centrale est donnée, à po- dWel - tentiels fixés, par F~el = uz . En déduire l'expression de Fel en fonction de v1 , v2 , C1 dz et C2 . 12 III.12 Montrer que la force électrostatique totale s'exerçant sur l'électrode centrale est donnée par : ã Å - v22 v12 1 C0 - + uz - Fel = 2 (1 + z/)2 (1 - z/)2 On applique une tension sinusoïdale v1 (t) = U sin(1 t) de fréquence f1 = 10 kHz et d'amplitude U = 15 V sur l'électrode 1. On impose de plus v2 (t) = -v1 (t). III.13 Linéariser l'expression précédente en z/. Quel est le contenu fréquentiel de v12 ? III.14 Vérifier que l'effet des forces électrostatiques est raisonnablement modélisable par : - - Fel = Kel z uz , où l'expression de la raideur Kel (indépendante du temps) est à préciser en fonction de C0 , U et . La calculer numériquement. III.15 Établir l'équation différentielle du mouvement de l'électrode centrale en tenant compte de cet effet supplémentaire. Exprimer la fonction de transfert H(p) = Z(p)/Ac (p). Préciser la valeur de la raideur globale dans la fonction de transfert. III.16 Faire l'application numérique pour les paramètres caractéristiques de H(p). Conclure. III.17 On suppose que les linéarisations invoquées précédemment sont légitimes tant que le déplacement de l'électrode centrale n'excède pas 30 % du déplacement possible. Donner alors l'accélération maximale mesurable par cet instrument. · Boucle de contrôle de vol stationnaire On souhaite programmer un automate de type « pilote automatique » assurant un vol stationnaire vertical. On définit, dans cette optique, un effort perturbateur (supposé uniquement dirigé suivant la verticale) comme entrée du schéma bloc : f (t). Le signal de sortie est l'accélération du cockpit ac (t). C'est une variation de portance qui doit permettre d'annuler l'effet de la perturbation. On considère pour cela l'incrément de portance -Fz (t) tel que Fz (t) = Fzeq - Fz (t), où Fzeq est la portance générée à l'équilibre. III.18 En tenant compte de la valeur de Fzeq , écrire la relation liant ac , f et Fz . Lorsque ac > 0, quel doit être le signe de Fz pour avoir un asservissement ? La boucle de régulation inclut le capteur d'accélérométrie étudié précédemment de transfert H(p), puis un actionneur de fonction de transfert globale D(p) (figure 13). F (p) Ac (p) 1/M Fz (p) Z(p) H(p) D(p) Figure 13 - Schéma de la régulation. 13 La fonction de transfert D(p) de l'actionneur résulte de l'association du moteur de commande du plateau fixe du rotor avec le système de tringlerie du rotor. Le moteur de commande du plateau est piloté par le signal de sortie de l'accéléromètre. Le moteur est alimenté par une tension vs (t) issue de l'accéléromètre. Il convertit ce signal, via des vérins, en une translation (t) du plateau fixe. Globalement le système est assimilable à un système du premier ordre de gain statique Km et de temps caractéristique T . III.19 Préciser l'expression de (p)/Vs (p). III.20 Le moteur et les vérins possèdent chacun un comportement du premier ordre. Identifier l'origine physique de tels comportements. Les temps caractéristiques sont très différents, si bien qu'un des organes impose sa dynamique du premier ordre alors que l'autre se comporte comme un gain. Quel organe limite la dynamique de l'actionneur ? Justifier votre réponse. Les questions précédentes permettent d'assimiler à un gain pur K1 la fonction de transfert entre déplacement du plateau collectif d'une part et l'angle d'incidence des pales d'autre part. Il en est de même entre et Fz (gain K2 ). III.21 Que valent K1 et K2 ? III.22 Former alors la fonction de transfert globale D(p) = Fz (p)/Z(p) et compléter le schéma bloc de la figure 14. F (p) Ac (p) 1/M Fz (p) (p) (p) Vs (p) Z(p) H(p) Figure 14 - Schéma détaillé de la régulation. III.23 Exprimer la fonction de transfert Ac (p)/F (p) du système ? III.24 L'accélération ac est-elle vraiment pertinente dans le cadre de l'asservissement proposé ? Sinon que faire pour y remédier ? 14