
X/ENS Physique B PC 2021
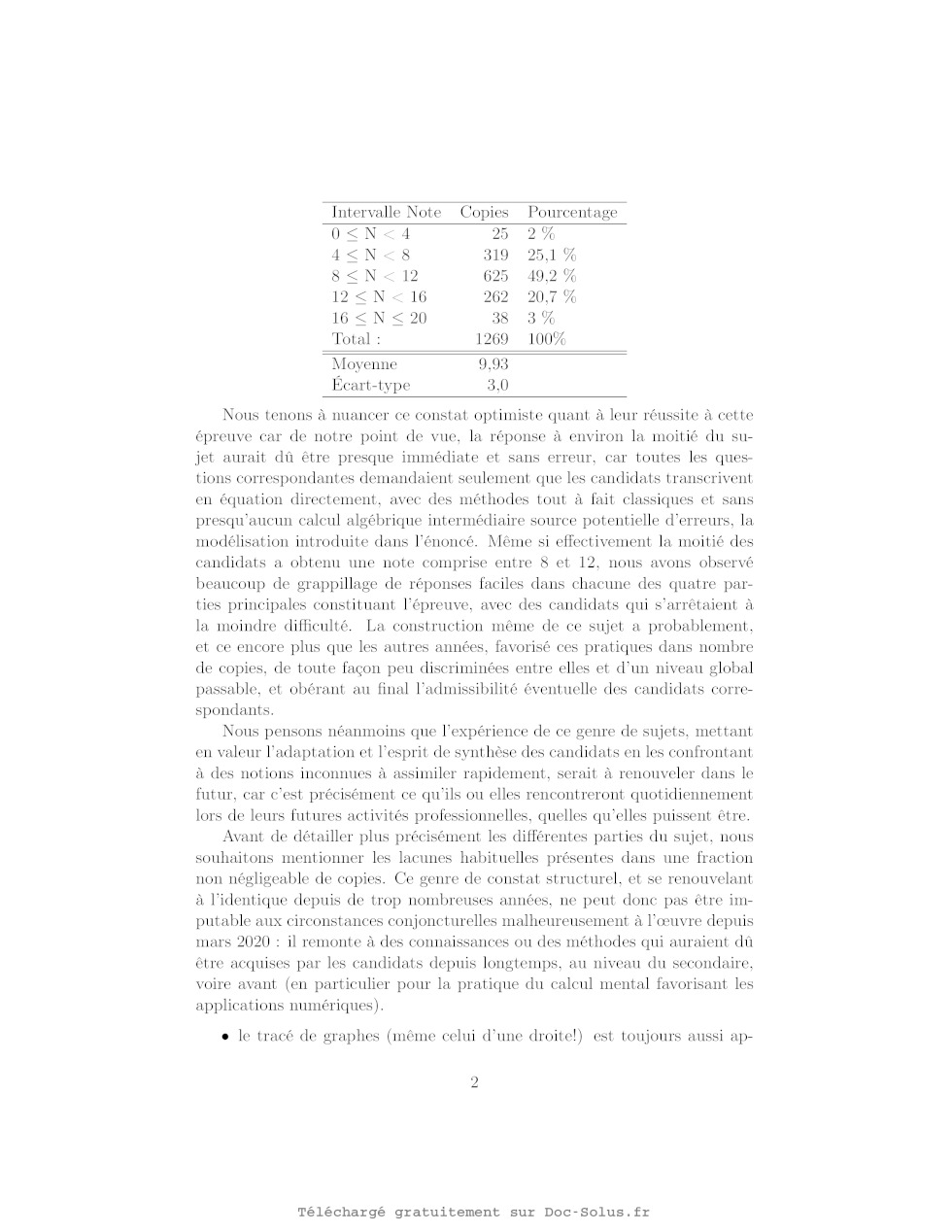
| Thème de l'épreuve | Mécanique de la cellule |
| Principaux outils utilisés | mécanique du solide, mécanique des fluides |
| Mots clefs | déformation, Langevin, libre parcours moyen, cisaillement, solide élastique, fluide newtonien |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)








Rapport du jury
(télécharger le PDF)

Énoncé obtenu par reconnaissance optique des caractères
ECOLE POLYTECHNIQUE - ESPCI
ECOLES NORMALES SUPERI EURES
CONCOURS D'ADMI SSION 2021
MERCREDI 14 AVRIL 2021
08h00 - 12h00
FILIERE PC - Epreuve n° 5
PHYSIQUE B (XEULC)
Durée : 4 heures
L'utilisation des calculatrices n'est pas
autorisée pour cette épreuve
Mécanique de la cellule
Le but de ce problème est d'étudier quelques propriétés mécaniques des cellules
biologiques. D'un
point de vue physique, une cellule est un objet 'mou' qui consomme de l'énergie
sous forme d'ATP. Il
s'agit donc d'un système hors d'équilibre thermodynamique. Nous nous
intéresserons ici essentiellement
à la caractérisation de la rhéologie cellulaire, c'est-à-dire aux propriétés
mécaniques de la cellule. Le
formulaire donne les valeurs des paramètres utiles pour les estimations d'ordre
de grandeur et les
applications numériques ainsi qu'un bref formulaire d'analyse vectorielle et
une figure rappelant les
caractéristiques d'une ellipse lors d'une étude harmonique.
Les deux dernières parties du problème (TITI et IV) sont indépendantes des deux
premières (T et IT).
Des résultats intermédiaires au sein des différents paragraphes permettent de
progresser dans le sujet.
Notations, formulaire et données numériques
e Vitesse caractéristique de l'écoulement dans le cytoplasme : u = 0,1 m.s |
e Taille caractéristique d'une cellule : Z = 10 um
e Viscosité dynamique du cytoplasme : 7 = 1 Pa.s"_!
e Masse volumique du cytoplasme : p. = 1,00 x 10° kg.m *
e Viscosité cinématique du cytoplasme : v, -- Je _ 1 x 10% m°.s 1
Pc
e Rayon d'une bille de latex : À} = 1 um
e Température : T = 310 K
e Constante de BOLTZMANN : kp = 14 x 107% J.K-1
--
e Expression de l'opérateur laplacien scalaire Ag = div(grad @), où @ est un
champ scalaire
a) Influence du déphasage b) Influence de l'amplitude
15 per 06-213 d=17/2 6=1/3 6=0 1.5 AIS 472 y
, \ \ | [| \ 7 17 A=10
© 05 è 05
à < Z 0 S 0 © Z O © I 0.5 1 -0.5 >
1 1
1.5 1.5
-1.5 -1 -0.5 0 0.5 1 1.5 -15 -10 -b 0 D 10 15
X=COS(@f) x=Acos(@f)
Figure 1 --- Caractéristiques d'une ellipse pour une étude harmonique.
I Questions préliminaires et ordres de grandeur
La figure 2 schématise une cellule eucaryote !. Le problème étudiera les
propriétés mécaniques de la
cellule entière ou de son cytoplasme. La taille caractéristique de la cellule
considérée se situe entre 10
et 100 um. L'intérieur de la cellule, appelé cytoplasme, est un milieu riche en
protéines, compartiments
membranaires et filaments du cytosquelette. Du point de vue de la physique de
la matière molle, le
cytoplasme est un fluide complexe dont les propriétés mécaniques font l'objet
du sujet. Les vitesses de
déplacements d'objets à l'intérieur du cytoplasme, par exemple les vésicules de
transport intracellulaire
ou les filaments du cytosquelette qui polymérisent ou dépolymérisent, sont de
l'ordre de 0,1 ms".
Dans cette partie préliminaire, nous supposons que le cytoplasme est un fluide
newtonien de masse
volumique p.. Nous utiliserons des arguments d'ordre de grandeur, ainsi que les
grandeurs sans di-
mension définies en mécanique des fluides pour simplifier l'étude du cytoplasme.
10-100 um
Filaments
du cytosquelette
Noyau
Cytoplasme
Figure 2 --- Schéma d'une cellule eucaryote. Les différents compartiments
cellulaires évoqués dans
l'énoncé sont représentés, ainsi que les échelles de longueurs utilisées.
e On désigne par (rt) le champ de vitesse du fluide intracellulaire en un point
M(T) du
cytoplasme et à l'instant {, dans un repère R = (Oxyz) associé au référentiel
de la cellule, supposé
galiléen.
Nous rappelons l'équation de NAVIER-STOKES pour un écoulement incompressible :
d -->
pe v -- À -- gradp+mA% (1)
où F désigne la résultante des forces volumiques extérieures exercée sur une
particule de fluide du
cytoplasme, p est la pression, 7 est la viscosité dynamique du cytoplasme.
L'écoulement dans le
cytoplasme est considéré comme incompressible. L'opérateur À représente
l'opérateur laplacien. La
d
dérivée particulaire -- a pour expression :
dé
d Ô ----
= + T-grad. 2
dt à © a)
Afin de simplifier l'étude du cytoplasme, il est nécessaire de comparer les
effets de différents phénomènes
entre eux. Pour cela, nous introduisons des grandeurs sans dimension et
différents temps caractéristiques
associés à certains phénomènes pour identifier ceux qui sont déterminants dans
le comportement
mécanique du cytoplasme.
e On définit le nombre de REYNOLDS, noté Re, comme le rapport sans dimension
entre le terme
convectif de la dérivée particulaire et les forces volumiques de viscosité
intervenant dans l'équation
de NAVIER-STOKES (ou, de façon équivalente, comme le rapport entre le temps
caractéristique de
diffusion de la quantité de mouvement et le temps caractéristique de
convection).
1. Cellule comportant un noyau et un cytoplasme.
-- Page 3/17 -
1. Donner l'expression de Re pour l'écoulement dans le cytoplasme cellulaire en
fonction de la
dimension caractéristique de l'extension de l'écoulement ZL, de la viscosité
cinématique 1 et de
la vitesse caractéristique u. Donner un ordre de grandeur de Re et conclure sur
le rôle du terme
convectif dans les écoulements du cytoplasme à l'intérieur de la cellule.
e Nous supposons que les forces volumiques extérieures et de pression exercées
sur une particule
de fluide dans le cytoplasme sont négligeables devant les forces volumiques de
viscosité.
Pour estimer la contribution du terme inertiel (terme en Üv/0t dans
l'expression de la dérivée parti-
culaire), on définit un temps caractéristique Tinertie tel que
OV
U
Per T Pc
Tinertie
2. On fait l'hypothèse que les forces volumiques de viscosité et le terme
inertiel dans l'équation
de NAVIER-STOKES sont du même ordre de grandeur. Exprimer Tinertie en fonction
de L, p.
et 7 puis calculer numériquement Finertie. En Comparant Tinertie AVEC les temps
caractéristiques
(supérieurs à la milliseconde) mis en jeu au cours des expériences de rhéologie
cellulaire que nous
évoquerons dans la suite, justifier le fait que l'on conserve les forces
volumiques de viscosité et
le terme inertiel dans l'équation de NAVIER-STOKES.
3. Déduire des approximations et hypothèses précédentes l'équation qui régit la
dynamique de
l'écoulement cytoplasmique. Rappeler le nom de ce type d'équation et donner une
interprétation
du coefficient de viscosité cinématique 1. relativement à cette équation.
II Suivi de particule unique et viscosité du cytoplasme
On étudie dans cette partie les phénomènes de diffusion dans le cytoplasme
cellulaire, considéré
comme un fluide newtonien. Les paragraphes préliminaires (IL.A, ILB et IL.C)
abordent quelques
modèles simplifiés. Ils nous permettront, à partir d'une étude microscopique de
la diffusion de particules
d'un gaz, et celle d'une particule en mouvement brownien dans un fluide, de
relier le coefficient de
diffusion D d'une particule brownienne à la viscosité dynamique n d'un fluide.
Cette relation, appelée
relation d''EINSTEIN, s'applique à un fluide newtonien. Elle est à la base
d'une méthode de rhéologie
passive permettant d'accéder à la viscosité 7. du cytoplasme à partir du suivi
d'une particule unique
(IL.D).
ITA Approche microscopique de la diffusion dans un gaz
On considère un gaz monoatomique, dont les particules ont une masse m, un rayon
r, et une vitesse
moyenne d'agitation thermique v (cette vitesse est la vitesse quadratique
moyenne définie comme la
racine carrée de la moyenne de la vitesse au carré soit ü -- 4/(v?)). Le nombre
total de particules est
noté N, le volume du gaz est noté V et sa température thermodynamique est notée
T. Le gaz est
considéré à l'équilibre thermique. On notera kg la constante de BOLTZMANN, n =
N/V le nombre de
particules du gaz par unité de volume et p = Nm/V = nm sa masse volumique.
On modélise les particules du gaz comme des billes de rayon r,, qui ne peuvent
s'interpénétrer, et
qui peuvent subir des collisions entre elles (ce modèle s'appelle le modèle des
sphères dures). On note
Tcol le temps de collision défini comme le temps moyen entre deux collisions
successives. La distance
moyenne parcourue par une particule entre deux collisions successives subies
par la même particule
est appelée libre parcours moyen, noté £. Enfin, la section efficace de choc
d'une particule, o:f = ATr£,
est la surface plane perpendiculaire à la vitesse d'une particule définissant
son extension spatiale.
Nous étudions dans ce paragraphe le transport de particules du gaz par
diffusion au sein de ce gaz.
-- Page 4/17 -
4. Relier le libre parcours moyen £ au temps de collision 7.4 et à la vitesse
v. Quel est l'ordre de
grandeur du nombre de particules se trouvant en moyenne dans le volume o,gr£ ?
En déduire que
0 --
C \ ' °
, Où c est une constante numérique. On admettra que c -- 3: On pourra effectuer
un
nOeff
schéma pour illustrer le raisonnement.
e On s'intéresse ici à la diffusion des particules de gaz se déplaçant sous
l'effet d'un gradient de
nombre de particules par unité de volume n(x) unidimensionnel. La vitesse des
particules est supposée
uniforme (indépendante de l'abscisse x) et égale à la vitesse quadratique
moyenne du gaz, v. On
considère un volume V = 2$S4 de gaz situé entre les abscisses x -- £ et x + {
(voir figure 3). Le nombre
volumique de particules de gaz à l'abscisse x -- £ (resp. x + £) est notée n(x
-- £) (resp. n(x + 4)). On
note P 1. le flux de particules de gaz à l'abscisse x -- {, par unité de
surface S, entrant dans le volume
V et Pw. le flux de particules de gaz à l'abscisse x + EUR, par unité de
surface S, sortant du volume V.
On suppose que les particules se déplacent dans la direction +x et que le
nombre de particules par
unité de volume n{x) varie lentement sur des distances de l'ordre de £. S'il
entre dW£ particules de
1 dW.
gaz dans le volume V à l'abscisse x -- £ entre les instants t et { + dt, alors
be -- -- ----. De la même
façon, s'il sort dW, particules de gaz du volume V à l'abscisse x + £ entre les
instants { et t + dt, alors
S
S dt
DWs --
V
n(x-l) \ n(x+l)
Figure 3 --- Modèle à une dimension pour l'approche microscopique de la
diffusion de
particules dans un gaz.
5. Montrer qu'entre les dates t et t + dt, dW, particules de gaz entrent dans
le volume V et dW,
particules de gaz en sortent, avec d\/e = Sün(x -- {)dt et AW, = Suün(x+4£)dt.
À l'aide d'un bilan
portant sur le nombre de particules dans le volume V, en déduire que le flux de
particules par
dn
unité de surface dans la direction +x défini par En 4x = ®we -- Pw,s s'écrit
wi» -- --vt
x
6. En tenant compte des déplacements des particules dans toutes les directions
de l'espace, on peut
1 1_ dn
montrer que le flux de particules par unité de surface dans V est 4 -- -P\x --
cat
x
En identifiant la relation précédente à la loi de FICK reliant le flux de
particules au gradient de
nombre de particules n(x), montrer que le coefficient de diffusion D des
particules de gaz s'écrit
1
3
2 -- SET montrer que le coefficient de
\ 1
7. À l'aide du théorème d'équipartition de l'énergie : 0
diffusion D s'écrit :
T
TD
-- Page 5/17 -
IIB Mouvement brownien et modèle de marche au hasard
Nous nous intéressons dans la suite au mouvement brownien d'une particule dans
un fluide sous
l2
Tcol
l'effet de l'agitation thermique. Nous allons établir, pour une telle
particule, la relation D = A----, où
À est un facteur numérique que nous déterminerons.
Pour décrire le mouvement d'une telle particule soumise à l'agitation
thermique, on considère une
marche aléatoire dans un espace à trois dimensions de N pas partant du point À
= P, fixe et arrivant
au point B = Py, dont la position dépend de la trajectoire suivie (paramétrée
par les N + 1 points
(Po,P1,...,P;,...,Pn), avec à = 0,1,...,N). On note d; le vecteur tel que d; =
P;P;1:1. La suite
des vecteurs d;, où l'indice à prend ici des valeurs entre 0 et N -- 1,
représente une trajectoire (une
réalisation) suivie par la particule entre les points À et B fixés (voir figure
4). Les points P;, appelés
points de collision, sont les points où la particule change de direction. La
durée de parcours entre
chaque point de collision est en moyenne égale au temps de collision Te.
Le temps moyen mis par la particule pour aller de À à B est noté t.
Figure 4 - Modèle de marche aléatoire à N pas dans un espace à trois dimensions.
Nous adoptons ci-dessous quelques hypothèses et définissons certaines notations
concernant la
marche au hasard présentée ci-dessus et schématisée sur la figure 4.
--
x La marche au hasard est isotrope : toutes les orientations des vecteurs d;
sont équiprobables.
x La marche au hasard est homogène : chaque point de collision obéit à la même
loi de probabilité.
x On désigne par (f) la moyenne d'une grandeur f(t) sur tous les chemins
possibles à N pas, entre
d d
À et B. On admet les propriétés suivantes : d (f) = (4) et (fg) = (f)(g) si f
et g sont deux
grandeurs indépendantes.
x On note f, la moyenne temporelle de f sur un chemin donné entre A et B.
L'hypothèse dite
d'ergodicité stipule (f) = f.
x Nous n'étudions pas le détail des collisions et nous nous limitons aux
caractéristiques de la marche
aléatoire évoquées ci-dessus.
N-1
On désigne par 5 -- > d -- AB un chemin possible pour aller de À à B en
effectuant N pas. La
i=0
marche aléatoire étant homogène et isotrope, (5) -- À, ce qui signifie que B
est situé sur une sphère
-- Page 6/17-
de centre À et de rayon moyen au carré (| AË 12).
8. Montrer que (AP?,,) = (AP?) + (d?) + (24;.AP;).
--
9. On note 6; l'angle entre les vecteurs AP, et d; (voir figure 4). Le libre
parcours moyen £ est
ici la valeur moyenne qu'aurait la composante du vecteur d; dans l'une des
trois directions
de l'espace, repérées par les vecteurs eZ. ce et eZ, formant une base
orthonormée. On à donc
-- --
(&,) -- (&,) -- (d.) -- {?, En considérant que les variables || d; |, || AP; ||
et 0; sont des
grandeurs indépendantes, montrer que (AP?,,) = (AP?) + 362.
10. En déduire que (| ë (2) = 3N4.
11. Indiquer la relation entre le temps moyen { pour aller de À à B, le temps
de collision 74 et le
ë |?
nombre de pas de la marche aléatoire N. En déduire alors l'expression de (| )
en fonction
de t, Let Teol.
12. Le coefficient de diffusion de particules à trois dimensions étant défini
par | 5 |2 = 6Dt, préciser
l'expression de D en fonction du libre parcours moyen £ et du temps de
collision 7.4. Comparer
cette expression à celle de D), obtenue par l'approche microscopique de la
diffusion de particules
à la question 6.
II.C Particule brownienne mésoscopique et modèle de Langevin
Nous nous intéressons maintenant à une particule brownienne de grandes
dimensions devant les
dimensions atomiques et se déplaçant dans un fluide à la température T. Nous
utilisons le modèle de
LANGEVIN pour établir la relation d''EINSTEIN, reliant le coefficient de
diffusion D de cette particule
brownienne et la viscosité dynamique du fluide. Notons que le coefficient de
diffusion que nous obtien-
drons dans cette situation ne possède pas le même statut que celui du
paragraphe ITA, qui décrivait
l'auto-diffusion dans un gaz.
On considère des particules sphériques de rayon r,, de masse m, se déplaçant à
la vitesse V dans
un liquide de viscosité dynamique 7. La position d'une particule au point M est
repérée par le vecteur
OM(t) = (x(t),y(t),z(t)) dans un système de coordonnées cartésiennes de repère
(O, ex, ey,ez). Les
particules sont soumises à :
+ une force de frottement fluide due au liquide, dont l'expression est donnée
par la force de STOKES
n = --6777rp V , avec V la vitesse d'une particule ;
x une force aléatoire (6) = (fx, fy, J2) telle que (fx) = (fy) = (f:) = 0 (où
(...) désigne la
moyenne sur un grand nombre de particules). Cette moyenne est l'analogue de la
moyenne sur les
chemins possibles, définie précédemment dans le cadre de la marche aléatoire,
et possède les mêmes
propriétés.
On suppose que l'équilibre thermodynamique est atteint.
13. En utilisant le théorème d'équipartition de l'énergie, déterminer
l'expression de (à? ), où la
notation à désigne la dérivée de x(t) par rapport au temps, composante de la
vitesse dans la
direction eZ.
14. On suppose que les variables x et f, sont indépendantes. À partir du
principe fondamental de
la dynamique appliqué à une particule, établir l'équation différentielle
vérifiée par (xt).
15. Résoudre cette équation différentielle et montrer qu'en régime permanent,
on obtient (xt) --
kBT/6rnr,. On introduira une durée caractéristique 7 et on donnera un critère
d'atteinte du
régime permanent.
-- Page 7/17 -
16. En supposant que (x°) (4 = 0) = 0 et des durées longues devant 7, montrer
que (x°) (t) = 2Dt
et établir la relation d'EINSTEIN
D= fl
GTNrp
(4)
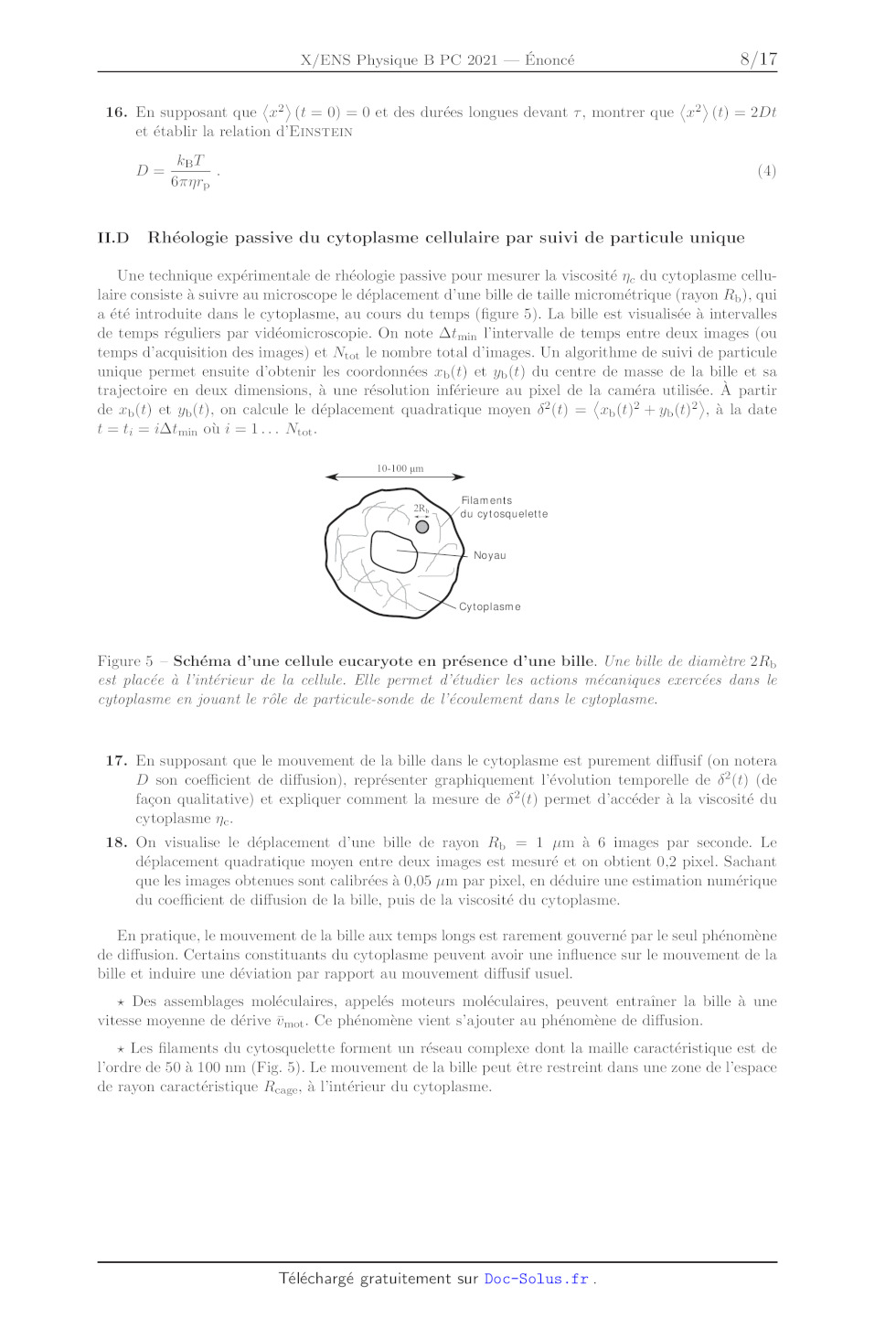
ID Rhéologie passive du cytoplasme cellulaire par suivi de particule unique
Une technique expérimentale de rhéologie passive pour mesurer la viscosité 7.
du cytoplasme cellu-
laire consiste à suivre au microscope le déplacement d'une bille de taille
micrométrique (rayon R;), qui
a été introduite dans le cytoplasme, au cours du temps (figure 5). La bille est
visualisée à intervalles
de temps réguliers par vidéomicroscopie. On note Afin l'intervalle de temps
entre deux images (ou
temps d'acquisition des images) et N4,4 le nombre total d'images. Un algorithme
de suivi de particule
unique permet ensuite d'obtenir les coordonnées x}(t) et yp(t) du centre de
masse de la bille et sa
trajectoire en deux dimensions, à une résolution inférieure au pixel de la
caméra utilisée. À partir
de x(t) et yp(t), on calcule le déplacement quadratique moyen 87(t) = {x,(#)° +
yp(t)?), à la date
t=t; = iAtmin Oùi= 1... Not.
)
Y
Filaments
du cytosquelette
Noyau
Cytoplasme
Figure 5 --- Schéma d'une cellule eucaryote en présence d'une bille. Une bille
de diamètre 2Ry
est placée à l'intérieur de la cellule. Elle permet d'étudier les actions
mécaniques exercées dans le
cytoplasme en jouant le rôle de particule-sonde de l'écoulement dans le
cytoplasme.
17. En supposant que le mouvement de la bille dans le cytoplasme est purement
diffusif (on notera
D son coefficient de diffusion), représenter graphiquement l'évolution
temporelle de 6?(t) (de
façon qualitative) et expliquer comment la mesure de 6?(t) permet d'accéder à
la viscosité du
cytoplasme 7.
18. On visualise le déplacement d'une bille de rayon À} -- 1 um à 6 images par
seconde. Le
déplacement quadratique moyen entre deux images est mesuré et on obtient 0,2
pixel. Sachant
que les images obtenues sont calibrées à 0,05 um par pixel, en déduire une
estimation numérique
du coefficient de diffusion de la bille, puis de la viscosité du cytoplasme.
En pratique, le mouvement de la bille aux temps longs est rarement gouverné par
le seul phénomène
de diffusion. Certains constituants du cytoplasme peuvent avoir une influence
sur le mouvement de la
bille et induire une déviation par rapport au mouvement diffusif usuel.
x Des assemblages moléculaires, appelés moteurs moléculaires, peuvent entraîner
la bille à une
vitesse moyenne de dérive not. Üe phénomène vient s'ajouter au phénomène de
diffusion.
x Les filaments du cytosquelette forment un réseau complexe dont la maille
caractéristique est de
l'ordre de 50 à 100 nm (Fig. 5). Le mouvement de la bille peut être restreint
dans une zone de l'espace
de rayon caractéristique cage, à l'intérieur du cytoplasme.
-- Page 8/17-
19. Illustrer à l'aide d'un schéma la trajectoire de la bille en présence de
moteurs moléculaires.
On supposera que le mouvement de dérive à la vitesse dt dû aux moteurs
moléculaires se
superpose au mouvement dû à la diffusion, et conduit à un comportement diffusif
avec dérive.
Établir l'équation donnant 2(t) en fonction de no, D et de t. Vérifier que le
mouvement est
bien diffusif sans dérive aux temps courts. Représenter graphiquement, et de
façon qualitative,
l'évolution temporelle de 6?(t) en représentation log-log.
20. Représenter à l'aide d'un schéma la trajectoire de la bille en situation de
diffusion confinée dans
une zone restreinte de l'espace. Montrer que l'expression 02(t) -- QRÉage [1 --
EXP (---4Dt / Rage) ,
avec « un facteur numérique, peut modéliser un comportement où le mouvement de
la bille
est restreint dans une cage de rayon caractéristique Reage. Vérifier que le
mouvement est bien
diffusif sans confinement aux temps courts. Représenter graphiquement, et de
façon qualitative,
l'évolution temporelle de 6?(t) en représentation log-log.
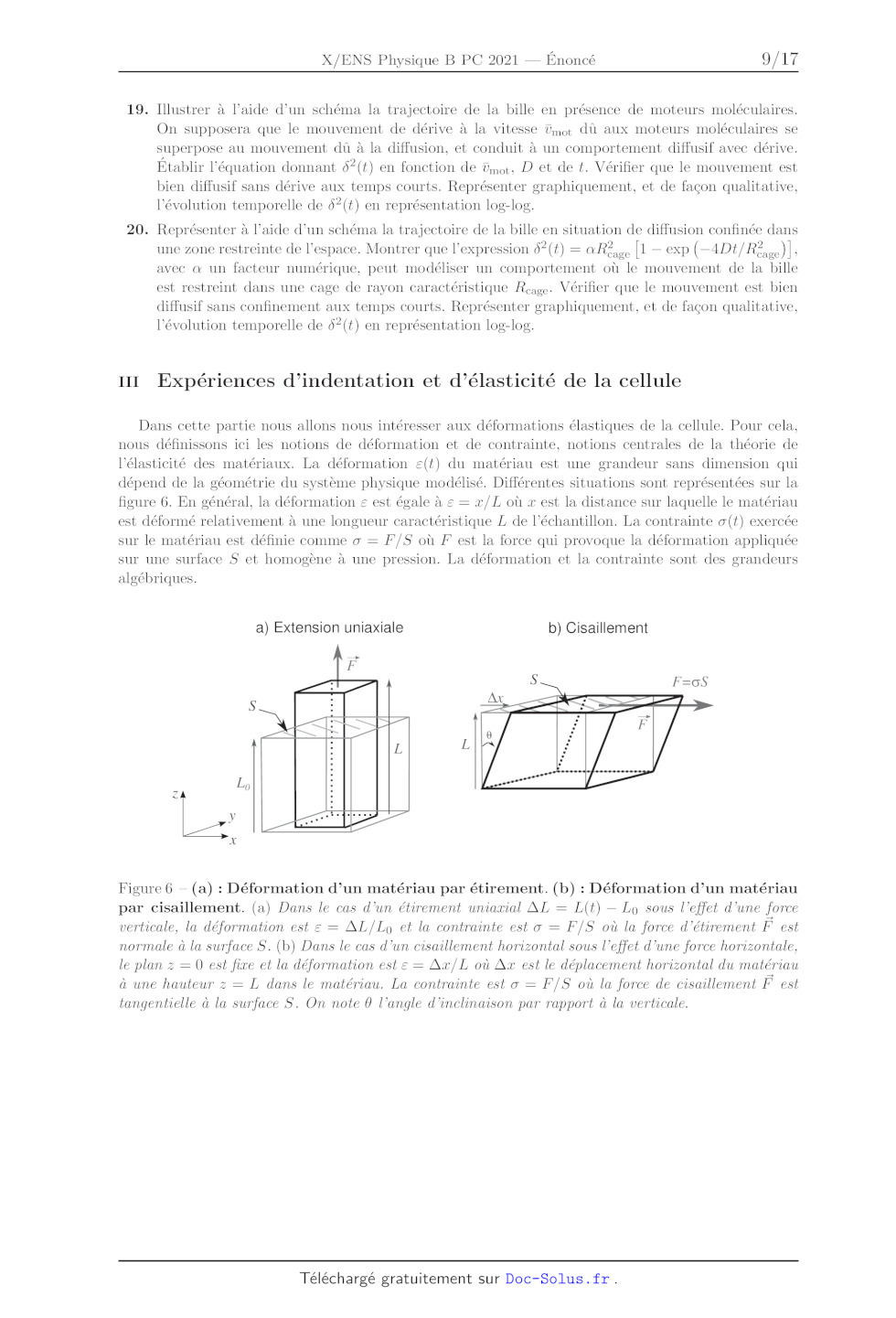
III Expériences d'indentation et d'élasticité de la cellule
Dans cette partie nous allons nous intéresser aux déformations élastiques de la
cellule. Pour cela,
nous définissons ici les notions de déformation et de contrainte, notions
centrales de la théorie de
l'élasticité des matériaux. La déformation e(t) du matériau est une grandeur
sans dimension qui
dépend de la géométrie du système physique modélisé. Différentes situations
sont représentées sur la
figure 6. En général, la déformation EUR est égale à £ = x/L où x est la
distance sur laquelle le matériau
est déformé relativement à une longueur caractéristique L de l'échantillon. La
contrainte o(t) exercée
sur le matériau est définie comme © = F/S où F est la force qui provoque la
déformation appliquée
sur une surface $ et homogène à une pression. La déformation et la contrainte
sont des grandeurs
algébriques.
a) Extension uniaxiale b) Cisaillement
F
S F=6$
À O
s AX =
D ° F
0
À L L 7
Lo
y st D
X
Figure 6 -- (a) : Déformation d'un matériau par étirement. (b) : Déformation
d'un matériau
par cisaillement. (a) Dans le cas d'un étirement uniaxial AL = L(t) -- Lo sous
l'effet d'une force
verticale, la déformation est £ = AL/L et la contrainte est o = F/S où la force
d'étirement F est
normale à la surface S.(b) Dans le cas d'un cisaillement horizontal sous
l'effet d'une force horizontale,
le plan z = 0 est fixe et la déformation est & = Ax/L où Ax est le déplacement
horizontal du matériau
à une hauteur z = L dans le matériau. La contrainte est o = F/S où la force de
cisaillement F est
tangentielle à la surface S. On note 0 l'angle d'inclinaison par rapport à la
verticale.
-- Page 9/17-
IIIA Déformations d'un solide élastique
Pour un matériau homogène, linéaire et purement élastique, la déformation est
proportionnelle à
la contrainte appliquée. On parle alors de solide de HOOKE. La constante de
proportionnalité entre la
contrainte et la déformation est analogue à la constante de raideur k d'un
ressort obéissant à la loi de
HOOKE F = kAx où Ax est l'allongement du ressort et F° la norme de la force de
rappel du ressort.
Nous étudions dans la suite deux cas particuliers simples de déformations d'un
solide élastique pour
comprendre quelques éléments de la théorie de l'élasticité.
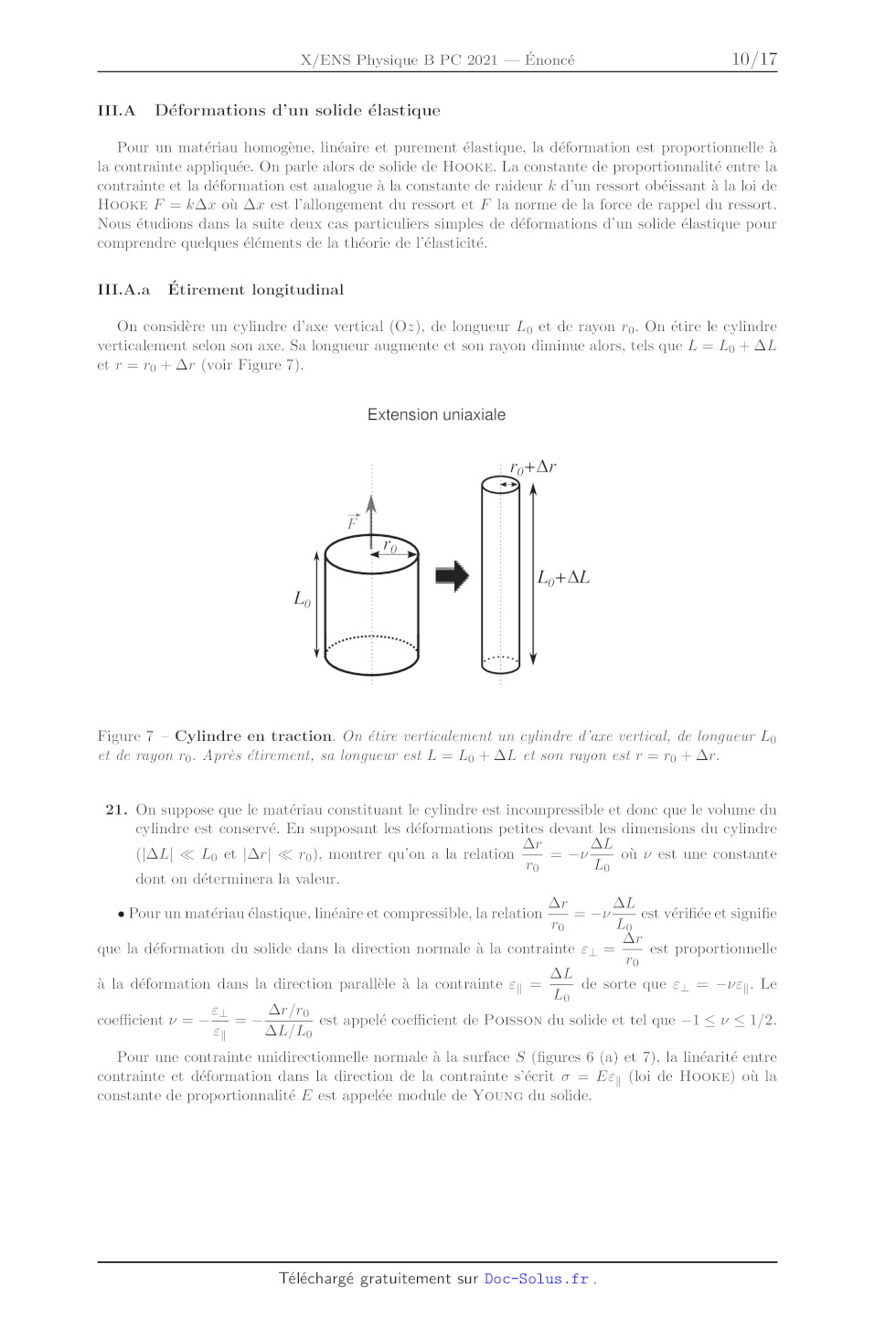
III.A.a Étirement longitudinal
On considère un cylindre d'axe vertical (Oz), de longueur Lo et de rayon ro. On
étire le cylindre
verticalement selon son axe. Sa longueur augmente et son rayon diminue alors,
tels que L = Lo + AL
et r = ro + Ar (voir Figure 7).
Extension uniaxiale
:Fo+Ar
CS
NT À
L+AL
Figure 7 --- Cylindre en traction. On étire verticalement un cylindre d'axe
vertical, de longueur Lo
et de rayon ro. Après étirement, sa longueur est L = Lo + AL et son rayon est r
= ro + Ar.
21. On suppose que le matériau constituant le cylindre est incompressible et
donc que le volume du
cylindre est conservé. En supposant les déformations petites devant les
dimensions du cylindre
Ar
([AL) & Lo et [Ar] EUR ro), montrer qu'on a la relation -- -- TT où y est une
constante
ro 0
dont on déterminera la valeur.
AT AL
e Pour un matériau élastique, linéaire et compressible, la relation -- =
--17---- est vérifiée et signifie
ro 0
AT
que la déformation du solide dans la direction normale à la contrainte EUR, =
---- est proportionnelle
ro
AL
à la déformation dans la direction parallèle à la contrainte EUR| -- FT. de
sorte que #1 = --ve. Le
0
EL Ar/Tro
coefficient y = ---- = --
EUR| AL/Lo
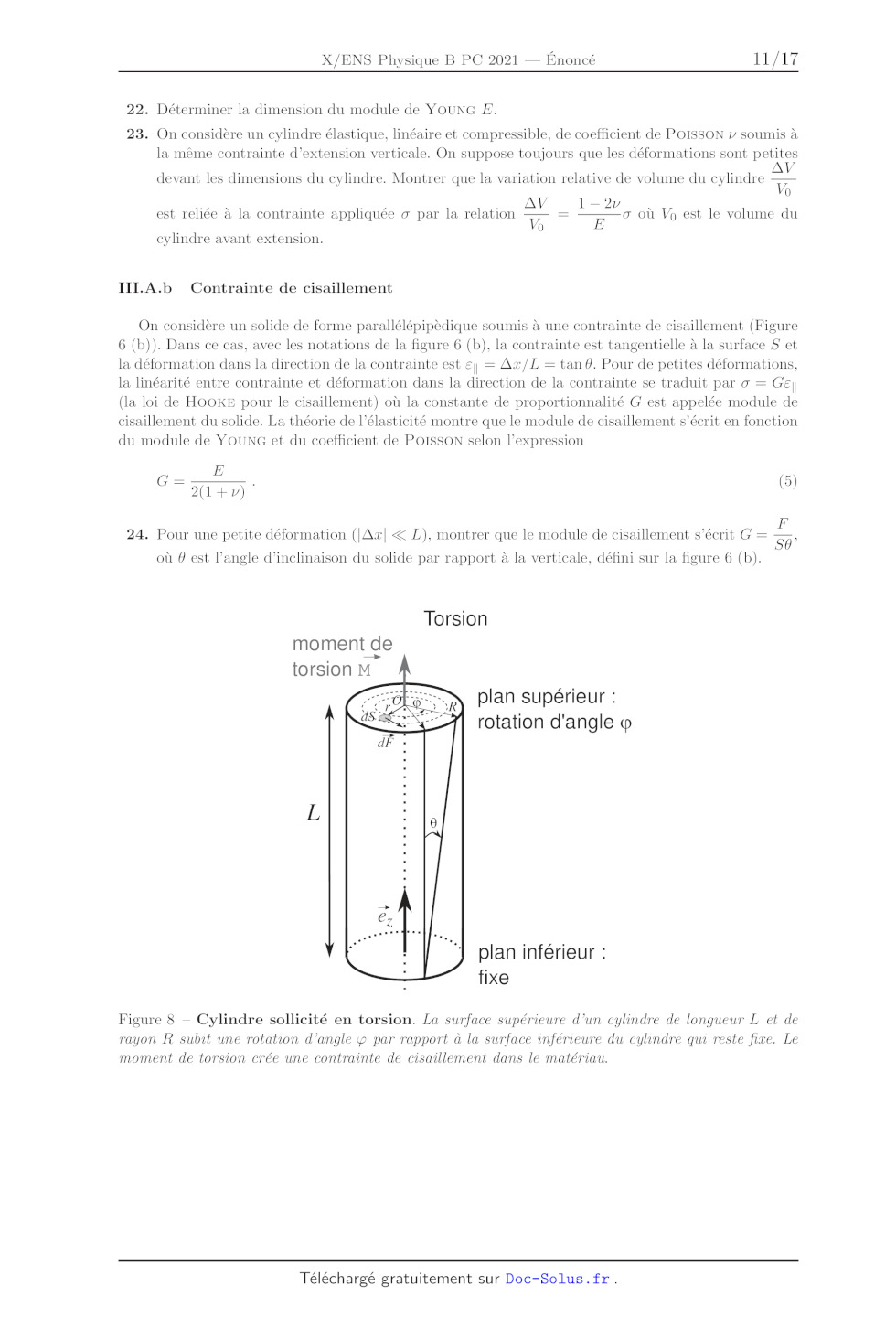
est appelé coefficient de POISSON du solide et tel que --1 < v < 1/2. Pour une contrainte unidirectionnelle normale à la surface S (figures 6 (a) et 7), la linéarité entre contrainte et déformation dans la direction de la contrainte s'écrit o -- EE] (loi de HOOKE) où la constante de proportionnalité Æ est appelée module de YOUNG du solide. -- Page 10/17- 22. Déterminer la dimension du module de YOUNG FE. 23. On considère un cylindre élastique, linéaire et compressible, de coefficient de POISSON z soumis à la même contrainte d'extension verticale. On suppose toujours que les déformations sont petites devant les dimensions du cylindre. Montrer que la variation relative de volume du cylindre V AV 1 -- 2 est reliée à la contrainte appliquée ©o par la relation = E o où VO est le volume du 0 cylindre avant extension. III. A.b Contrainte de cisaillement On considère un solide de forme parallélépipèdique soumis à une contrainte de cisaillement (Figure 6 (b)). Dans ce cas, avec les notations de la figure 6 (b), la contrainte est tangentielle à la surface S et la déformation dans la direction de la contrainte est EUR} = Ax/L = tan 0. Pour de petites déformations, la linéarité entre contrainte et déformation dans la direction de la contrainte se traduit par o -- Ge] (la loi de HOOKE pour le cisaillement) où la constante de proportionnalité G est appelée module de cisaillement du solide. La théorie de l'élasticité montre que le module de cisaillement s'écrit en fonction du module de YOUNG et du coefficient de POISSON selon l'expression E =: (5) 24. Pour une petite déformation ([Ax| & L), montrer que le module de cisaillement s'écrit G = Sg où 0 est l'angle d'inclinaison du solide par rapport à la verticale, défini sur la figure 6 (b). Torsion moment de torsion M open Plan supérieur : SEX] rotation d'angle p = En. ss" ." s = " . + + + + » = = = = Figure 8 --- Cylindre sollicité en torsion. La surface supérieure d'un cylindre de longueur L et de rayon R subit une rotation d'angle © par rapport à la surface inférieure du cylindre qui reste fixe. Le moment de torsion crée une contrainte de cisaillement dans le matériau. plan inférieur : fixe -- Page 11/17- e Un exemple classique de cisaillement pur est donné par la torsion d'un fil cylindrique (fil de torsion). On considère un fil élastique assimilé à un cylindre de rayon À , de longueur L (avec LS R), d'axe vertical (Oz) soumis à un moment de torsion M de direction parallèle à l'axe du cylindre. Le plan supérieur du cylindre tourne alors d'un angle w, supposé petit, par rapport au plan inférieur qui reste fixe (Figure 8). On note ez le vecteur unitaire vertical. On appelle ici O le point d'intersection entre l'axe du cylindre et le plan supérieur du cylindre. 25. Montrer qu'un élément de surface dS' du plan supérieur du cylindre situé à la distance r de l'axe T du cylindre subit une déformation e(r) -- T° selon la direction orthoradiale. 26. À partir de la loi de HOOKE pour le cisaillement et de la définition de la contrainte, déduire l'expression de la norme dF de la force tangentielle dé qui s'exerce sur l'élément de surface dS en fonction de G, r, L, 6, et ds. -- 27. Exprimer le moment de torsion M dû aux forces de cisaillement et montrer qu'il se met sous la forme M = Ce; où la raideur du fil de torsion C' est une constante (appelée constante de torsion) qu'on déterminera en fonction de G, R et L. IIIB Indendation par pointe AFM (Atomic Force Microscope) Une technique expérimentale permettant de sonder les propriétés mécaniques des cellules consiste à indenter (c'est-à-dire déformer localement) la cellule à l'aide d'une pointe de microscope à force atomique (AFM pour 'atomic force microscope'). Les figures 9 et 10 représentent, respectivement, le principe et les résultats d'une expérience d'indentation d'une cellule par une pointe AFM pyramidale. La géométrie de la pointe d''AFM joue un rôle important et détermine le comportement de la force F(ô) appliquée sur la cellule en fonction de l'indentation, notée 0. On réalise la déformation en restant dans le régime élastique de la cellule (déformation réversible). La pointe AFM est le plus souvent une pyramide à base carrée et, dans ce cas, la dépendance de la force F(6) n'est plus linéaire en fonction de l'indentation. à la différence des exemples abordés au paragraphe IILA. La force varie alors en 0° et s'exprime de la manière suivante : F(6) = C E*6* , (6) E où C est une constante numérique dépendant de la pointe AFM et E* -- ] ; est appelé module de -- 1 VOUNG effectif. Lors de l'expérience d'indentation, la pointe AFM est déplacée verticalement selon l'axe (Oz) vers le bas grâce à un levier flexible dont la raideur est modélisée par une constante de raideur k4rm et dont la hauteur z à son extrémité est imposée par le déplacement d'un système piézo-électrique. On note Ç la distance verticale entre la pointe et l'extrémité du levier (aussi appelée déflexion du levier). Au début de l'expérience (4 = 0), la base de la pointe affleure la cellule sans l'indenter, et l'extrémité du levier et le haut de la pointe sont alignés de sorte que Ç(0) = z(0) = ô = 0 (voir figure 9). Lorsqu'on indente la cellule (4 > 0), la force F'(ô) et
l'indentation Ô augmentent. On suppose
que la force exercée par le levier sur la pointe est celle d'un ressort de
constante de raideur k4rm
et d'allongement Ç. On donne les caractéristiques suivantes de la pointe et du
levier : © = 0,5 et
kAarm = 0,1 Nm !.
L'indentation est effectuée à l'aide d'un déplacement du levier à vitesse
constante et mesurée grâce
à une méthode optique. Une photodiode permet de repérer la position d'un point
lumineux issu de
la réflexion d'un faisceau laser sur un miroir placé sur la pointe. On néglige
les éventuels frottements
exercés par le milieu extracellulaire sur la pointe et le levier dans cette
expérience.
28. Expliquer, synthétiquement, comment on peut déduire la force F°' appliquée
sur la cellule à partir
de la mesure de la position de l'extrémité du levier et de la position de la
pointe.
-- Page 12/17 -
T Laser Photodiode
À Mi NN a N 1=0
IFOIF x
£ Milieu DS + Levier
extracellulaire
Cellule
Figure 9 --- Schéma de principe d'une expérience d'indentation d'une cellule
par une pointe
AFM. Les schémas représentent l'expérience vue de profil (axe vertical (Oz)
dirigé vers le bas) à
l'instant initial t -- 0 où le levier est horizontal et à un instant t > O0 au
cours de l'indentation
où le levier est défléchi. Lorsque le levier est abaissé, la pointe indente la
cellule et le levier fléchit.
L''extrémité du levier est repérée par sa position verticale z. L'indentation Ô
correspond à la position
verticale de la pointe. La défiexion du levier est notée K.
CO
CO
N
|
jam
LA
-1 | | -1 |
-0.5 0 05 71 2 -0.5 0 05 71 2
Indentation ô (um) Indentation 6 (um)
--
Force F (nN)
Force F (nN)
Figure 10 -- Résultats d'une expérience d'indentation d'une cellule par une
pointe AFM.
Graphe de gauche : courbes force-indentation F(5) pour deux cellules
différentes (courbes 1 et 2 res-
pectivement). Graphe de droite : expérience où la cellule est d'abord indentée
jusqu'à 1 um environ en
descendant le levier puis en remontant le levier.
29. La figure 10 (graphe de gauche) représente les courbes d'indentation F(6)
pour deux cellules
différentes correspondant aux courbes 1 et 2 respectivement. Déterminer en
exploitant la figure
quelle cellule sera la plus déformable. Donner une estimation numérique du
module de YOUNG
effectif E* des deux cellules.
30. On effectue une expérience d'indentation jusqu'à 1 jm environ puis on
retire la pointe (voir figure
10, graphe de droite). Proposer une explication permettant de comprendre le
comportement
quasi-statique observé et analyser le rôle éventuel de la dissipation visqueuse.
ITI.C Oscillations de la pointe AFM et réponse harmonique
On utilise le dispositif expérimental, décrit au paragraphe précédent (figure
9), dans lequel on
fait osciller la pointe AFM pour indenter la cellule de manière périodique.
L'évolution temporelle du
-- Page 13/17 -
déplacement piézoélectrique du levier est z(t) = 20 + 21 cos(wt + w,) où 20 est
la position moyenne
du levier, z1 l'amplitude des oscillations, w la pulsation et &, la phase. On
suppose que l'amplitude
des oscillations z1 est petite devant la position moyenne 2. Dans ces
conditions, l'indentation 6 et
la force F sont également périodiques de pulsation w et leurs évolutions sont
données par : Ô(t) --
do + 01 cos(wt +5) et Ft) = Fo + PF; cos(wt +wr). Nous rappelons que la pointe
AFM est pyramidale
et donc F(6) = C'E*6?. Les valeurs moyennes de F et 6 sont telles que F(66) =
F0.
31. En linéarisant l'expression de F'(ô) aux petites amplitudes d'oscillations,
exprimer F() -- F6 en
fonction de à -- 00, EUR, E* et 00.
E
32. En utilisant l'expression du module de cisaillement G -- 2+v) vue au
paragraphe III A, et
V
en exprimant E* en fonction de G, déduire de la question précédente
l'expression du module de
cisaillement G de la cellule en fonction de 0, EUR, v, F -- F5, et à -- 00.
On introduit les notations complexes suivantes F(w) et Ô(w) associées à F -- F6
et Ô -- Üo telles que :
F(w) = Fewi+pr) et (uw) = elwt+#5), F6 ER. (7)
----. ]
1Cd0 o(&) On peut alors écrire
une relation linéaire entre les grandeurs complexes F(w) et d(w), en
introduisant une grandeur Z{(w)
analogue à une impédance électrique, telle que :
2) = Re = OU AU) (9)
Le module de cisaillement complexe G(w) est défini par G(w) --
Le module de cisaillement G(w) comporte une partie réelle, notée G'(w), et une
partie imaginaire,
notée G"(w).
0.4
0.2F
0
-0.2E
force F (nN)
-0.4 | |
-A0 -20 0 20 40
Indentation à (nm)
Figure 11 - Réponse harmonique dans une expérience d'oscillations à faible
amplitude de
la pointe AFM. Courbes représentant la force F en fonction de l'indentation Ôd
à des fréquences
d'oscillations variant entre 0,1 et 100 Hz.
AC)
33. En interprétant l'expression F(w) = | Re(Z{w)) + iw Im en) ô(w) comme une
relation
W
entre la force F, l'indentation Ô et la dérivée de Ô par rapport au temps,
proposer une in-
terprétation physique des parties réelle et imaginaire de G(w). Déterminer le
déphasage 4 entre
F(w) et ô(w) en fonction de G'(w) et G"(w) et discuter les cas 4 = 0 et w = r/2.
-- Page 14/17 -
34. La figure 11 représente les résultats expérimentaux d'une expérience
d'oscillations d'une pointe
AFM pour une amplitude d'oscillation de 50 nm à différentes fréquences.
Interpréter le tracé
de la force F' en fonction de l'indentation Ô. Discuter notamment l'évolution
de la direction du
demi-grand axe des ellipses observées ainsi que leur largeur, en fonction de la
fréquence des
oscillations. On pourra s'appuyer sur la figure 1 en préambule du sujet.
IV Modèles visco-élastiques du cytoplasme cellulaire
La cellule et son cytoplasme ont à la fois des caractéristiques mécaniques d'un
solide élastique (solide
de HOOKE) et d'un fluide visqueux (fluide newtonien). Ce sont donc des milieux
visco-élastiques. Nous
introduisons ici les modèles visco-élastiques les plus couramment utilisés en
mécanique cellulaire. À
partir de la déformation £(t) du matériau et de la contrainte o(t) appliquée au
matériau (définies au
o(t)
paragraphe III et sur la figure 6), on définit le module de cisaillement par
G(t) = ----=.
e(t)
Pour caractériser un matériau visco-élastique, on utilise :
x l'expérience dite de fluage où on impose une contrainte constante o(t) = op =
C!£ et on mesure
la déformation en fonction du temps £(t) :
x l'expérience de dynamique oscillatoire où la déformation et la contrainte
oscillent de façon har-
monique à la pulsation w, e(t) = Ep cos(wt) et o(t) = oo cos(wt + &), où v est
le déphasage entre la
contrainte et la déformation.
Dans cette partie, nous étudierons d'abord les propriétés des deux éléments de
base, le solide de
HOOKE (représenté par un élément élastique analogue à un ressort de module de
YOUNG E) et le
fluide newtonien (représenté par un élément visqueux analogue à un amortisseur
fluide de viscosité n)
(paragraphes IV.A et IV.B) avant de les combiner dans le modèle visco-élastique
de KELVIN- VOIGT
(paragraphe IV.C) qui associe un élément élastique et un élément visqueux en
parallèle (Figure 12).
Elément élastique Elément visqueux Modèle de Kelvin-Voigt
(solide de Hooke) (fluide newtonien)
Ë --e
ANA -
Module d'Young E Viscosité n n
Ga-LEa Ovise=MEvise , YY '
matériau visco-élastique
Figure 12 - Éléments de base pour la modélisation d'un matériau visco-élastique
linéaire.
De gauche à droite, sont représentés : un élément élastique {solide de HOOKE de
module de YOUNG
FE), un élément visqueux (fluide newtonien de viscosité n) et une association
en parallèle de ces deux
éléments dans le modèle de KELVIN-VOIGT.
IV.A Cas élémentaires : solide de Hooke et fluide newtonien
e Nous rappelons qu'un solide de HOOKE obéit à la loi du même nom : o = EE.
35. Nous étudions la réponse du solide de HOOKE dans une expérience de fluage.
On considère un
échelon de contrainte, qui a pour expression o(t) = oo = C! pour toute date t >
0. Déterminer
l'expression de e(t).
-- Page 15/17-
e Un fluide newtonien est un matériau purement visqueux. Il est caractérisé par
sa viscosité 7. On
de
dE" telle que o = né.
peut montrer que la contrainte © est proportionnelle au taux de déformation £ --
36. Dans le cadre d'une expérience de fluage, on soumet le fluide newtonien à
un échelon de contrainte
(o(t) = o0 pour tout temps t > 0). Déterminer l'expression de e(t), en
supposant la déformation
du fluide nulle à £ = 0.
IV.B Cas harmonique et aspects énergétiques
On considère maintenant un matériau visco-élastique soumis à une sollicitation
où la déformation et
la contrainte oscillent à la pulsation w. On utilise la notation complexe : £ =
pet et & = opeilt+e) =
ooe?e*!, où EUR0 EUR R et o0 EUR R. Le module de cisaillement complexe est G =
o/e = G'+iG", avec
G' = Re(G) et G" = Im(G). On note Go = |G]| le module de G.
37. Déterminer l'expression de G pour un solide de HOOKE d'une part, puis pour
un fluide newtonien
d'autre part. En déduire G", G", Go et le déphasage & pour un solide de HOOKE
puis pour un
fluide newtonien.
38. Définir le travail élémentaire par unité de volume dw fourni par une
contrainte o au cours d'une
déformation infinitésimale de.
39. Déterminer dw dans le cas où E(t) = Ep cos(wt) et o(t) = oo cos(wt +4) . On
mettra l'expression
de ôw sous la forme suivante : Ôw -- Ôwi + dw2, avec ÔWI = ---WwopEp cos
wcoswtsinwtdt et
ÊW2 = WOpEo sin v sin' wtdt.
AO. Exprimer l'énergie volumique de déformation wr fournie à l'unité de volume
sur une période
T . 1 . . .
T'= -- en fonction de £0, 00 et &. En déduire wr pour un solide de HOOKE, puis
pour un fluide
W
newtonien. Proposer une interprétation de wy pour un matériau visco-élastique
linéaire.
A1. Exprimer l'énergie volumique w due à Ôw1. fournie à l'unité de volume sur
un quart de
P 8 d 1,7/4; 9 d
ze ee T/A 1
période T/4 et définie par : WTA = Jo / du. En déduire w; 7/4 pour un solide de
HOOKE et
pour un fluide newtonien. Proposer une interprétation de w r/4 pour un matériau
visco-élastique
linéaire.
42. À partir des questions 40 et 41, déterminer tan et en donner une
signification à partir de
grandeurs énergétiques pour un matériau visco-élastique linéaire.
IV.C Modèles de Kelvin-Voigt d'un fluide visco-élastique
Le modèle de KELVIN-VOIGT est un des modèles les plus élémentaires décrivant le
comportement
d'un matériau visco-élastique linéaire. Il combine les propriétés d'un solide
de HOOKE et d'un fluide
newtonien.
La figure 12 représente le modèle de KELVIN-VOIGT sous la forme d'un ressort et
d'un amortisseur
associés en parallèle et avec les propriétés suivantes :
x le ressort est un élément élastique de module de YOUNG Æ, soumis à la
contrainte o4, et subissant
la déformation EUR] ;
x l'amortisseur est un élément visqueux de viscosité n, de contrainte oise, et
de déformation Evisc.
43. Établir l'expression de la déformation exv et de la contrainte oxv en
fonction des paramètres
du ressort et de l'amortisseur.
44. Établir l'équation différentielle vérifiée par la contrainte oxv et la
déformation £xy du matériau
visco-élastique. On fera apparaître un temps de relaxation T -- --
-- Page 16/17-
45.
46.
47.
48.
Dans le cas d'une expérience de fluage (échelon de contrainte oxv(t > 0) --
oo), déterminer
l'évolution de la déformation £xvy(t) en résolvant l'équation différentielle de
la question 44 et
en prenant comme condition initiale exy(t = 0) = 0. Donner l'allure graphique
de oxv(t) et
EKv(t).
Dans le cas d'une déformation et d'une contrainte harmoniques, établir
l'équation algébrique,
associée à l'équation différentielle de la question 44, à l'aide des notations
complexes introduites
au paragraphe IV.B. En déduire l'expression du module de cisaillement complexe
Gxwy(w), puis
les expressions de Gky(w), Gkv(w) et wkv(w) en fonction de w, E et 7.
Donner l'allure graphique de G%, et GK. On fera apparaître une pulsation
caractéristique we
et on analysera les régimes asymptotiques. Discuter le comportement aux temps
longs (basses
fréquences) et aux temps courts (hautes fréquences) du matériau visco-élastique
dans le modèle
de KELVIN-VOIGT et comparer au solide élastique et au fluide newtonien.
À l'aide des résultats des expériences d'indentation par une pointe AFM en
réponse harmo-
nique présentés sur la figure 11 (partie IIL.C, question 84), discuter la
validité du modèle de
KELVIN-VOIGT pour appréhender le comportement mécanique d'une cellule. On
pourra s'ap-
puyer sur l'évolution des caractéristiques des ellipses observées dans les
expériences en fonction
de la fréquence.
-- Page 17/17 -