
Centrale Physique 1 PC 2023
| Thème de l'épreuve | Améliorations des performances en cyclisme |
| Principaux outils utilisés | mécanique du point, électromagnétisme, mécanique des fluides |
| Mots clefs | ionosphère, incertitudes, couche limite, équation de Von Karman, GPS |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)







Rapport du jury
(télécharger le PDF)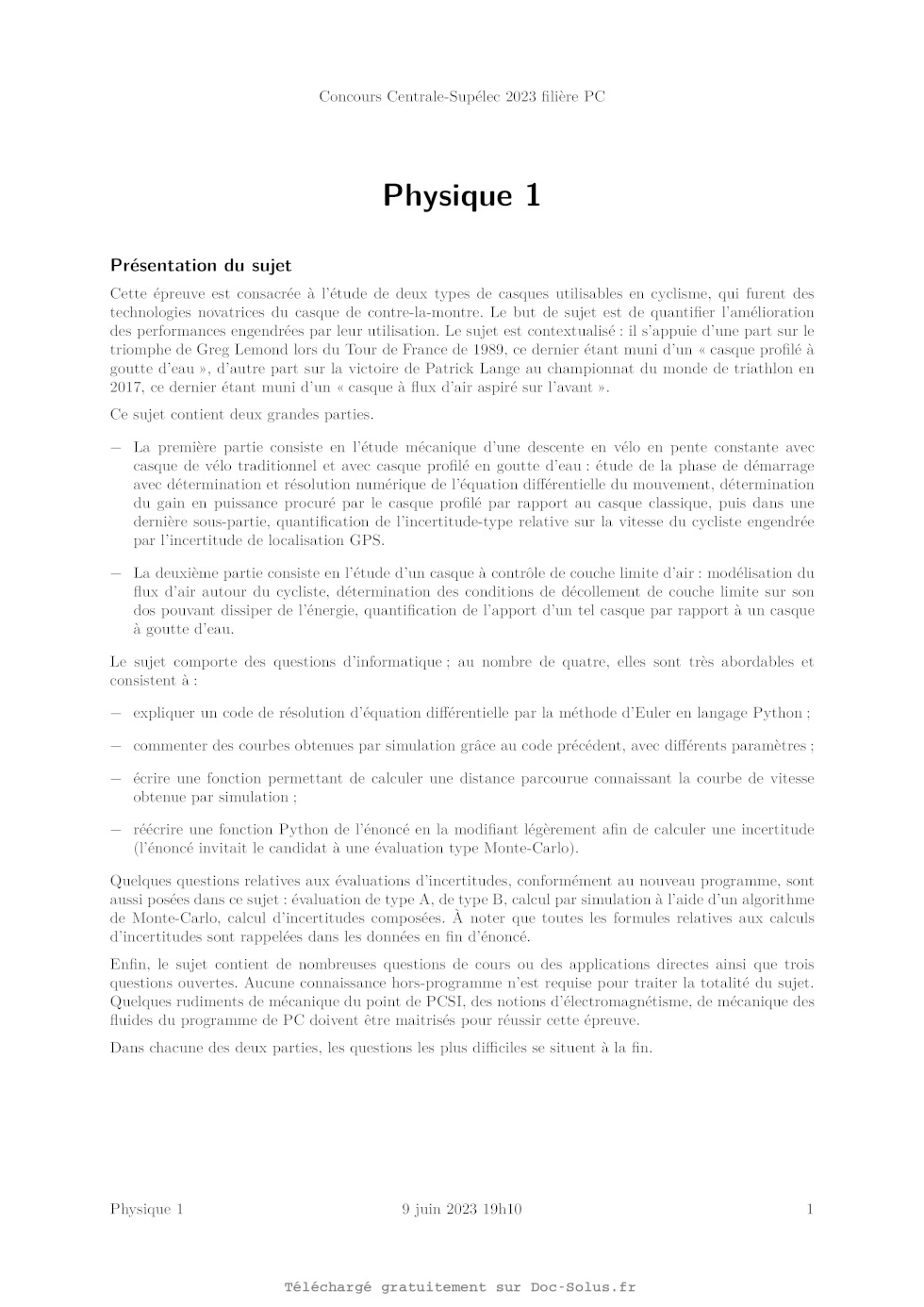
Énoncé obtenu par reconnaissance optique des caractères
Physique 1
PC
4 heures Calculatrice autorisée
2023
Améliorations des performances en cyclisme
Dans le cyclisme de haut niveau, les gains aérodynamiques font bien souvent la
différence, en particulier en contre-
la-montre où les vitesses de déplacement sont les plus élevées. À ces vitesses,
90% de la puissance développée
est utilisée pour lutter contre l'effort de trainée aérodynamique. Parmi les
facteurs influant sur cette trainée, le
casque représente de l'ordre de 2 à 8% de la trainée totale, en fonction de la
géométrie de celui-ci. L'utilisation
d'un casque performant joue donc un rôle important dans l'amélioration des
performances.
Le 23 juillet 1989, Greg Lemond remporte le Tour de France devant Laurent
Fignon avec 8 secondes d'avance
au terme des 3285 km de l'épreuve. L'ultime étape, décisive, est un
contre-la-montre lors duquel Greg Lemond
prend l'avantage sur Laurent Fignon en lui reprenant 58 secondes sur les 24,5
km du parcours, effectués à près
de 55 km-h-! de vitesse moyenne. Au-delà des considérations physiologiques des
deux cyclistes, Lemond utilisa
de nombreux éléments novateurs en ce qui concerne l'aérodynamisme. En
particulier, il était muni d'un casque
profilé, révolutionnaire pour l'époque. Fignon, de son côté, ne portait pas de
casque.
Figure 1 Greg Lemond (à gauche) et Laurent Fignon
(à droite) lors du dernier contre-la-montre du Tour 1989
Ce sujet propose de déterminer le gain en puissance que permettent deux
évolutions majeures du casque de
contre-la-montre.
Figure 2 Casque de vélo traditionnel (à gauche), en goutte d'eau (au centre) et
à flux d'air (à droite)
Certaines questions, peu ou pas guidées, demandent de l'initiative de la part
du candidat. Leur énoncé est repéré
par une barre en marge. Il est alors demandé d'expliciter clairement la
démarche, les choix et de les illustrer,
le cas échéant, par un schéma. Le barème valorise la prise d'initiative et
tient compte du temps nécessaire à la
résolution de ces questions.
Certaines formules et données utiles ainsi que les définitions de quelques
fonctions Python sont regroupées en
fin d'énoncé.
P052/2023-03-16 11:04:50 Page 1/14 (Ghsey-\c-sA
I Une première évolution de la forme du casque : du casque clas-
sique vers le casque profilé en goutte d'eau
L'objectif de cette partie est de quantifier le gain de puissance que procure
ce type de casque par rapport à un
casque dit « classique ».
IA - Évaluation du gain en puissance par une approche empirique
Afin de quantifier l'apport d'un casque profilé par rapport à un casque
traditionnel, on étudie une phase de
descente en roue libre (c'est-à-dire sans pédalage) sur route rectiligne, de
pente constante. La figure 3 précise le
système de coordonnées cartésiennes utilisé.
y
Figure 3 Représentation schématique du système étudié
Pour toute cette partie, on considérera le système {cycliste + vélo}, assimilé
à un point matériel M. On supposera
ce système soumis aux seules actions extérieures suivantes :
-- l'action de la pesanteur, notée P
-- l'action de la route sur les roues, notée R incluant :
e la réaction normale, notée N ,
e la résistance au roulement, notée F et supposée telle que F = --u,.Né, où N
est la norme de la réaction
normale et w,. le coefficient de résistance au roulement :
-- l'action de l'air sur le système.
On note m la masse du système, v la vitesse du système dans le référentiel
terrestre, g l'accélération de la
pesanteur, à l'angle entre la direction horizontale et la direction de la route.
I.A.1) Étude de la phase de démarrage
Avant d'envisager une étude en régime permanent, il est nécessaire de
caractériser la phase de démarrage pour
déterminer la distance que parcourt le cycliste avant d'atteindre sa vitesse
limite. On supposera que le cycliste
est initialement à la position x = 0 à l'instant { = 0 et se lance dans la
pente sans vitesse initiale.
On modélise l'action de l'air sur le système {cycliste + vélo} par une force de
trainée de la forme
--> 1 _,
Fr = T9 pS CRU v
où p est la masse volumique de l'air, $ la surface frontale projetée sur le
plan perpendiculaire à l'écoulement, C,
le coefficient de trainée aérodynamique du système {cycliste + vélo} et v, la
norme de © sa vitesse par rapport
à la route.
Dans cette section I.A.1, on prendra pour les applications numériques $C', =
0,30 m° et à = 0,10rad (descente
sur une pente de 10%).
Q 1. Rappeler l'expression du nombre de Reynolds, noté À,, de l'écoulement de
l'air autour du cycliste
et rappeler ce qu'il caractérise. Donner un ordre de grandeur de R, pour un
cycliste roulant à 40 km-h=*. En
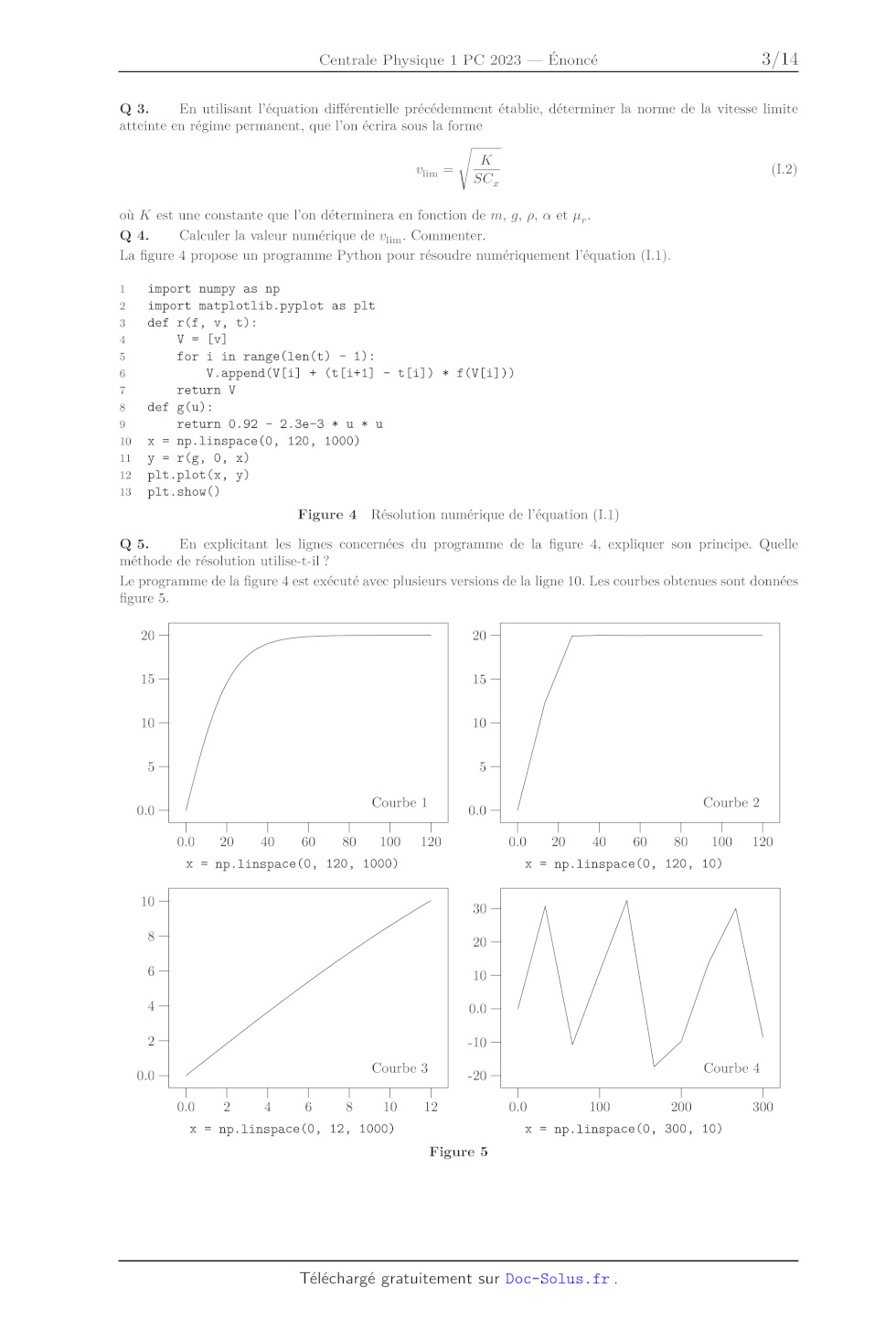
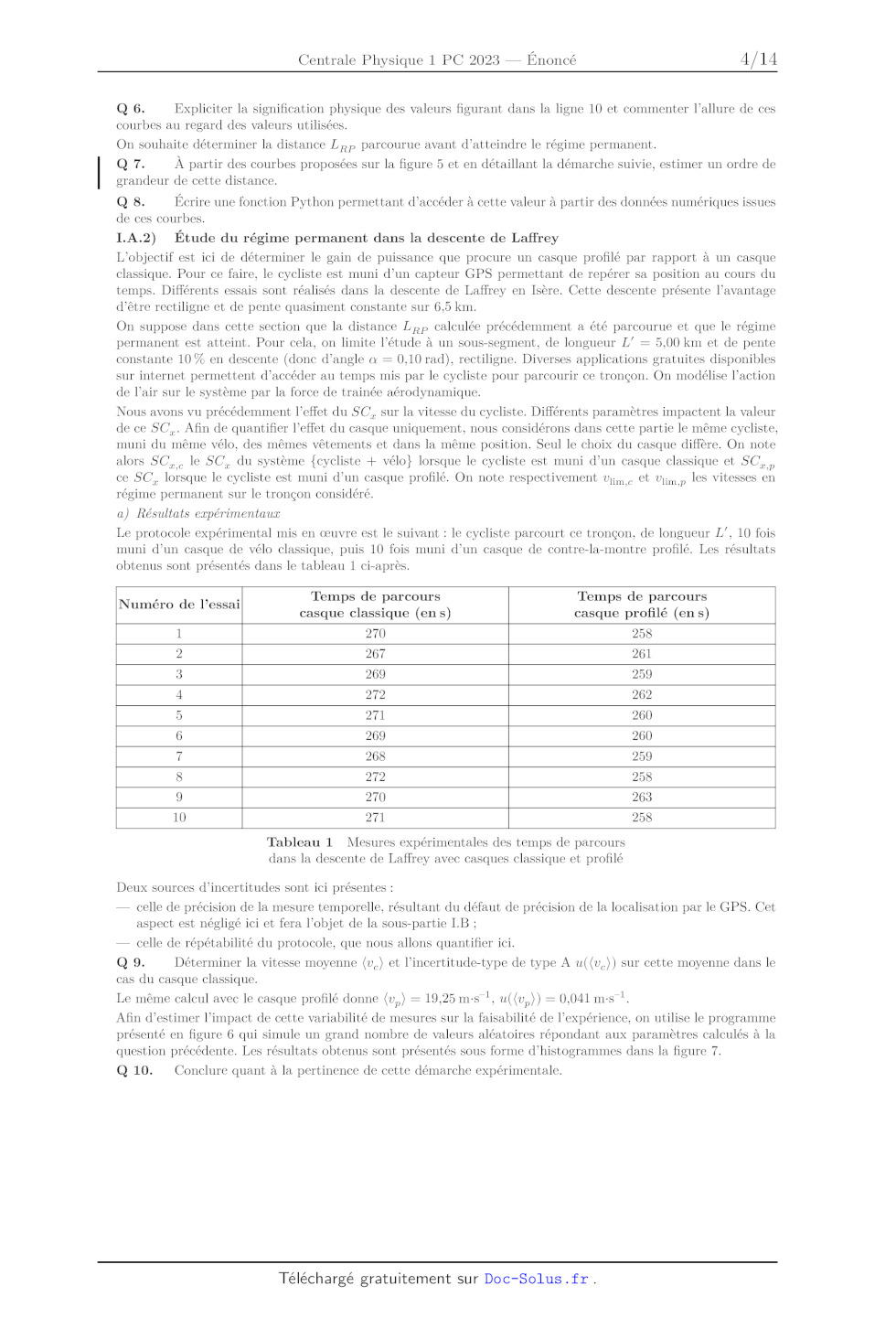
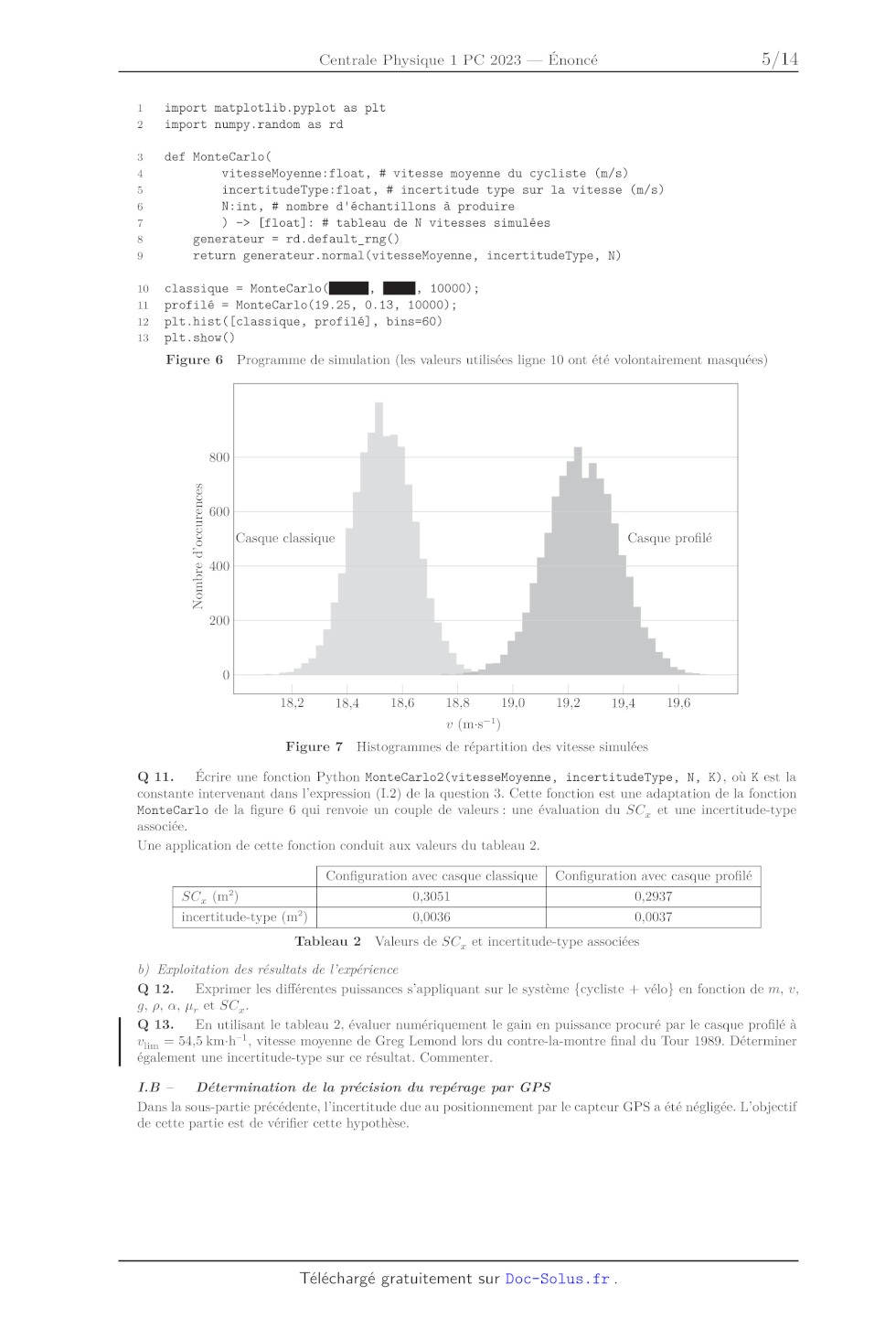
considérant que, si 10° < R, < 10%, la trainée est proportionnelle au carré de la vitesse, le modèle de trainée proposé parait-il adapté ? Q 2. Déterminer l'équation différentielle vérifiée par v, la norme de la vitesse du système {cycliste + vélo }. On l'écrira sous la forme suivante, en précisant les expressions littérales et les valeurs numériques des paramètres a et b, du(t) ut av?(t) = b. (L.1) P052/2023-03-16 11:04:50 Page 2/14 (C2) BY-Nc-SA | Q 3. En utilisant l'équation différentielle précédemment établie, déterminer la norme de la vitesse limite atteinte en régime permanent, que l'on écrira sous la forme K Ulim -- SC T où À est une constante que l'on déterminera en fonction de m, g, p, a et ui. Q 4. La figure 4 propose un programme Python pour résoudre numériquement l'équation (L.1). I 2 3 def 4 O 6 T 8 def 9 10 X -- IL y -- 12 plt 13 plt Q 5. Calculer la valeur numérique de v,,,. Commenter. import numpy as np import matplotlib.pyplot as plt r(f, v, t): V = [v] for i in range(len(t) - 1): V.append(Vli]l + (tli+1] - t[i]l) * f(V[i])) return V g Cu) : return 0.92 - 2.3e-3 *%x u * u = np.linspace(0O, 120, 1000) r(g, O0, x) .plot(x, y) .show() Figure 4 Résolution numérique de l'équation (L.1) (L.2) En explicitant les lignes concernées du programme de la figure 4, expliquer son principe. Quelle méthode de résolution utilise-t-il ? Le programme de la figure 4 est exécuté avec plusieurs versions de la ligne 10. Les courbes obtenues sont données figure 5. 20 -- 20 -- 15 -- 15 -- 10 -- 10 -- D -- 5 | 0.0 -- Courbe 1 0.0 -- Courbe 2 | | | | | | | | | | | | | | 0.0 20 40 60 80 100 120 0.0 20 40 60 80 100 120 x = np.linspace(0O, 120, 1000) x = np.linspace(0, 120, 10) 10 -- 30 -- 6 -- 10 -- 1-- 0.0 -- 2 -- -10 -- 0.0 -- Courbe 3 _9p Courbe 4 | | | | | | | | | | | 0.0 2 4 6 8 10 12 0.0 100 200 300 x = np.linspace(0, 12, 1000) x = np.linspace(0, 300, 10) Figure 5 P052/2023-03-16 11:04:50 Page 3/14 CERTES Q 6. Expliciter la signification physique des valeurs figurant dans la ligne 10 et commenter l'allure de ces courbes au regard des valeurs utilisées. On souhaite déterminer la distance LR parcourue avant d'atteindre le régime permanent. Q 7. À partir des courbes proposées sur la figure 5 et en détaillant la démarche suivie, estimer un ordre de grandeur de cette distance. Q 8. Ecrire une fonction Python permettant d'accéder à cette valeur à partir des données numériques issues de ces courbes. I. A.2) Étude du régime permanent dans la descente de Laffrey L'objectif est ici de déterminer le gain de puissance que procure un casque profilé par rapport à un casque classique. Pour ce faire, le cycliste est muni d'un capteur GPS permettant de repérer sa position au cours du temps. Différents essais sont réalisés dans la descente de Laffrey en Isère. Cette descente présente l'avantage d'être rectiligne et de pente quasiment constante sur 6,5 km. On suppose dans cette section que la distance L,K calculée précédemment a été parcourue et que le régime permanent est atteint. Pour cela, on limite l'étude à un sous-segment, de longueur L" = 5,00 km et de pente constante 10% en descente (donc d'angle & = 0,10 rad), rectiligne. Diverses applications gratuites disponibles sur internet permettent d'accéder au temps mis par le cycliste pour parcourir ce tronçon. On modélise l'action de l'air sur le système par la force de trainée aérodynamique. Nous avons vu précédemment l'effet du SC', sur la vitesse du cycliste. Différents paramèétres impactent la valeur de ce SC... Afin de quantifier l'effet du casque uniquement, nous considérons dans cette partie le même cycliste, muni du même vélo, des mêmes vêtements et dans la même position. Seul le choix du casque diffère. On note alors SC, le SC, du système {cycliste + vélo} lorsque le cycliste est muni d'un casque classique et SC, ce 5C, lorsque le cycliste est muni d'un casque profilé. On note respectivement v;,. et u:,, les vitesses en régime permanent sur le tronçon considéré. a) Résultats expérimentaux Le protocole expérimental mis en oeuvre est le suivant : le cycliste parcourt ce tronçon, de longueur L", 10 fois muni d'un casque de vélo classique, puis 10 fois muni d'un casque de contre-la-montre profilé. Les résultats obtenus sont présentés dans le tableau 1 ci-après. Numéro de l'essai casque classique (en s) casque profilé (en s) 1 270 258 2 267 261 3 269 259 1 272 262 5 271 260 6 269 260 7 268 259 s 272 258 9 270 263 10 271 258 Tableau 1 Mesures expérimentales des temps de parcours dans la descente de Laffrey avec casques classique et profilé Deux sources d'incertitudes sont ici présentes : -- celle de précision de la mesure temporelle, résultant du défaut de précision de la localisation par le GPS. Cet aspect est négligé ici et fera l'objet de la sous-partie LB : -- celle de répétabilité du protocole, que nous allons quantifier ici. Q 9. Déterminer la vitesse moyenne {v,) et l'incertitude-type de type À u(({v.,.)) sur cette moyenne dans le cas du casque classique. Le même calcul avec le casque profilé donne {v,) = 19,25 ms *, u({v,)) = 0,041mes ". Afin d'estimer l'impact de cette variabilité de mesures sur la faisabilité de l'expérience, on utilise le programme présenté en figure 6 qui simule un grand nombre de valeurs aléatoires répondant aux paramètres calculés à la question précédente. Les résultats obtenus sont présentés sous forme d'histogrammes dans la figure 7. Q 10. Conclure quant à la pertinence de cette démarche expérimentale. P052/2023-03-16 11:04:50 Page 4/14 (C2) BY-Nc-SA | 1 import matplotlib.pyplot as plt 2 import numpy.random as rd 3 def MonteCarlo( 4 vitesseMoyenne:float, # vitesse moyenne du cycliste (m/s) 5 incertitudeType:float, # incertitude type sur la vitesse (m/s) 6 N:int, # nombre d'échantillons à produire 7 ) -> [float]: # tableau de N vitesses simulées
8 generateur = rd.default_rng()
9 return generateur.normal(vitesseMoyenne, incertitudeType, N)
10 classique = MonteCarlo(, ED, 10000);
11 profilé = MonteCarlo(19.25, 0.13, 10000);
12 plt.hist([classique, profilé], bins=60)
13 plt.show()
Figure 6 Programme de simulation (les valeurs utilisées ligne 10 ont été
volontairement masquées)
800
un
=
© 600
O
= Casque classique Casque profilé
TD
o 400
2
GS
©
7
200
0
18,2 18,4 18,6 18,8 19,0 19,2 19,4 19,6
v (m:87°)
Figure 7 Histogrammes de répartition des vitesse simulées
Q 11. Écrire une fonction Python MonteCarlo2(vitesseMoyenne, incertitudeType,
N, K), où K est la
constante intervenant dans l'expression (1.2) de la question 3. Cette fonction
est une adaptation de la fonction
MonteCarlo de la figure 6 qui renvoie un couple de valeurs : une évaluation du
SC', et une incertitude-type
associée.
Une application de cette fonction conduit aux valeurs du tableau 2.
Configuration avec casque classique | Configuration avec casque profilé
SC, (n°) 0,3051 0,2937
incertitude-type (m°) 0,0036 0,0037
Tableau 2 Valeurs de SC', et incertitude-type associées
b) Exploitation des résultats de l'expérience
Q 12. Exprimer les différentes puissances s'appliquant sur le système
{cycliste + vélo} en fonction de m, v,
9, p, à, u, et SC.
Q 13. En utilisant le tableau 2, évaluer numériquement le gain en puissance
procuré par le casque profilé à
Tim = 54,5 km-h° !, vitesse moyenne de Greg Lemond lors du contre-la-montre
final du Tour 1989. Déterminer
également une incertitude-type sur ce résultat. Commenter.
I.B --- Détermination de la précision du repérage par GPS
Dans la sous-partie précédente, l'incertitude due au positionnement par le
capteur GPS a été négligée. L'objectif
de cette partie est de vérifier cette hypothèse.
P052/2023-03-16 11:04:50 Page 5/14 (C2) BY-Nc-SA |
La localisation d'un capteur GPS (Global Positioning system) s'appuie sur la
mesure des temps de parcours de
signaux émis par un ensemble de satellites situés à environ 20 000 km
d'altitude et reçus par le capteur GPS au
sol. Les signaux sont émis sous la forme de paquets d'ondes dans deux fines
bandes spectrales dédiées, centrées
respectivement sur les fréquences 7, = 1575,4 MHz et v, = 1227,6 MHz.
L'information obtenue d'un premier satellite donne une position possible du
capteur à la surface d'une sphère
centrée autour de ce satellite. Un second permet de situer l'appareil sur le
cercle intersection entre les deux
sphères centrées autour de ces deux satellites. Un troisième permet de limiter
la position à deux points, dont un
seul est à la surface de la Terre. Un dernier permet de synchroniser l'horloge
des satellites avec celle du capteur.
Une incertitude dans l'estimation de la distance entre le capteur et un
satellite se reporte sur la localisation au sol.
Dans la suite nous ne considérons qu'un des satellites dont l'horloge est
supposée parfaitement synchronisée avec
celle du capteur, on néglige donc l'incertitude sur la mesure temporelle. On
considère, en première approximation,
que la précision de positionnement au sol est liée à l'incertitude de mesure de
distance capteur-satellite et à un
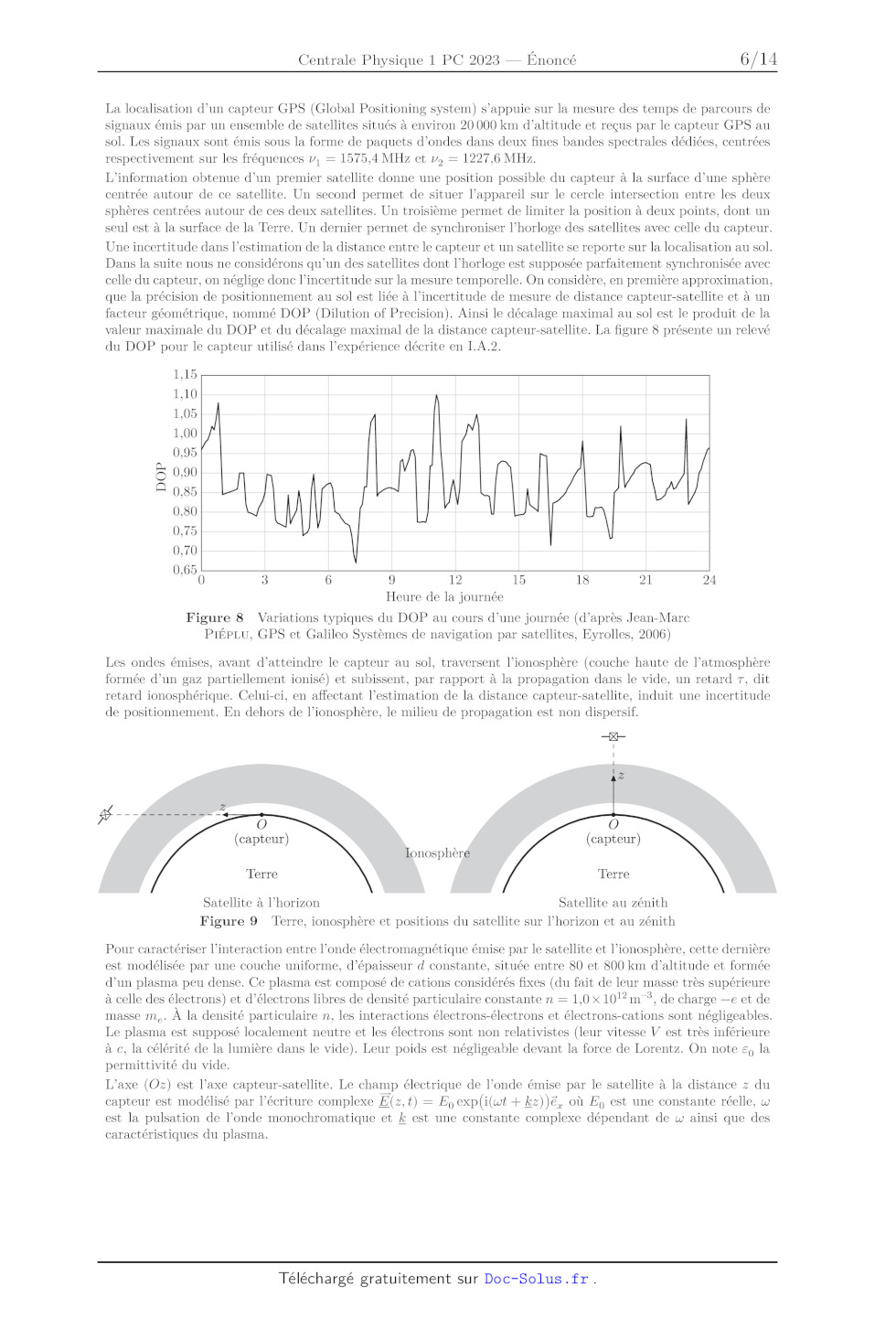
facteur géométrique, nommé DOP (Dilution of Precision). Aïnsi le décalage
maximal au sol est le produit de la
valeur maximale du DOP et du décalage maximal de la distance capteur-satellite.
La figure 8 présente un relevé
du DOP pour le capteur utilisé dans l'expérience décrite en I.A.2.
1,15
1.10
1.05
1.00
0,95
0,90
0,85
0,80
0,75
0,70
0,65
DOP
0 3 ( 9 12 15 18 21 24
Heure de la journée
Figure 8 Variations typiques du DOP au cours d'une journée (d'après Jean-Marc
PIiÉPLU, GPS et Galileo Systèmes de navigation par satellites, Eyrolles, 2006)
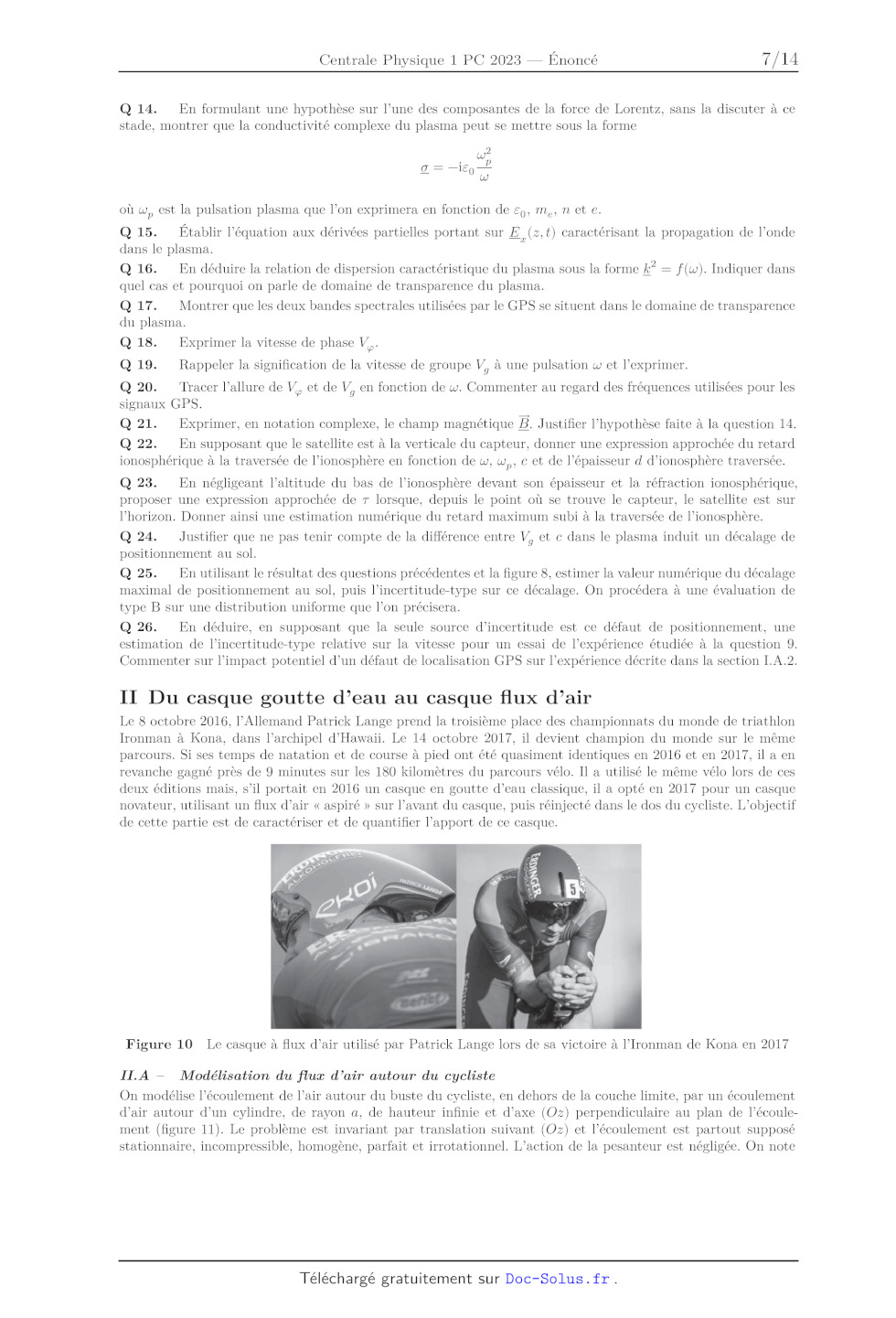
Les ondes émises, avant d'atteindre le capteur au sol, traversent l'ionosphère
(couche haute de l'atmosphère
formée d'un gaz partiellement ionisé) et subissent, par rapport à la
propagation dans le vide, un retard 7, dit
retard ionosphérique. Celui-ci, en affectant l'estimation de la distance
capteur-satellite, induit une incertitude
de positionnement. En dehors de l'ionosphère, le milieu de propagation est non
dispersif.
#- OT >
(capteur)
(capteur)
Jonosphère
Terre Terre
Satellite à l'horizon Satellite au zénith
Figure 9 Terre, ionosphère et positions du satellite sur l'horizon et au zénith
Pour caractériser l'interaction entre l'onde électromagnétique émise par le
satellite et l'ionosphère, cette dernière
est modélisée par une couche uniforme, d'épaisseur d constante, située entre 80
et 800 km d'altitude et formée
d'un plasma peu dense. Ce plasma est composé de cations considérés fixes (du
fait de leur masse très supérieure
à celle des électrons) et d'électrons libres de densité particulaire constante
n = 1,0 x 10{?m *, de charge --e et de
masse m... À la densité particulaire n. les interactions électrons-électrons et
électrons-cations sont négligeables.
Le plasma est supposé localement neutre et les électrons sont non relativistes
(leur vitesse V est très inférieure
à c, la célérité de la lumière dans le vide). Leur poids est négligeable devant
la force de Lorentz. On note EUR, la
permittivité du vide.
L'axe (Oz) est l'axe capteur-satellite. Le champ électrique de l'onde émise par
le satellite à la distance z du
capteur est modélisé par l'écriture complexe E(2, t)=E, exp(i(wt ---- kz))é, où
Æ,, est une constante réelle, w
est la pulsation de l'onde monochromatique et k£ est une constante complexe
dépendant de w ainsi que des
caractéristiques du plasma.
P052/2023-03-16 11:04:50 Page 6/14 (C2) BY-Nc-SA |
Q 14. En formulant une hypothèse sur l'une des composantes de la force de
Lorentz, sans la discuter à ce
stade, montrer que la conductivité complexe du plasma peut se mettre sous la
forme
uw?
KW
où w,, est la pulsation plasma que l'on exprimera en fonction de &ç, m,.,n et e.
Q 15. Établir l'équation aux dérivées partielles portant sur E (z,t)
caractérisant la propagation de l'onde
dans le plasma.
Q 16. En déduire la relation de dispersion caractéristique du plasma sous la
forme k° = f (w). Indiquer dans
quel cas et pourquoi on parle de domaine de transparence du plasma.
Q 17. Montrer que les deux bandes spectrales utilisées par le GPS se situent
dans le domaine de transparence
du plasma.
Q 18. Exprimer la vitesse de phase V...
Q 19. Rappeler la signification de la vitesse de groupe V, à une pulsation w
et l'exprimer.
Q 20. Tracer l'allure de V, et de V, en fonction de w. Commenter au regard des
fréquences utilisées pour les
signaux GPS.
Q 21. Exprimer, en notation complexe, le champ magnétique B. Justifier
l'hypothèse faite à la question 14.
Q 22. En supposant que le satellite est à la verticale du capteur, donner une
expression approchée du retard
ionosphérique à la traversée de l'ionosphère en fonction de w, w,, c et de
l'épaisseur d d'ionosphère traversée.
Q 23. En négligeant l'altitude du bas de l'ionosphère devant son épaisseur et
la réfraction ionosphérique,
proposer une expression approchée de 7 lorsque, depuis le point où se trouve le
capteur, le satellite est sur
l'horizon. Donner ainsi une estimation numérique du retard maximum subi à la
traversée de l'ionosphère.
Q 24. Justifier que ne pas tenir compte de la différence entre V, et c dans le
plasma induit un décalage de
positionnement au sol.
Q 25. En utilisant le résultat des questions précédentes et la figure 8,
estimer la valeur numérique du décalage
maximal de positionnement au sol, puis l'incertitude-type sur ce décalage. On
procédera à une évaluation de
type B sur une distribution uniforme que l'on précisera.
Q 26. En déduire, en supposant que la seule source d'incertitude est ce défaut
de positionnement, une
estimation de l'incertitude-type relative sur la vitesse pour un essai de
l'expérience étudiée à la question 9.
Commenter sur l'impact potentiel d'un défaut de localisation GPS sur
l'expérience décrite dans la section I.A.2.
IT Du casque goutte d'eau au casque flux d'air
Le 8 octobre 2016, l'Allemand Patrick Lange prend la troisième place des
championnats du monde de triathlon
Ironman à Kona, dans l'archipel d'Hawaïi. Le 14 octobre 2017, il devient
champion du monde sur le même
parcours. Si ses temps de natation et de course à pied ont été quasiment
identiques en 2016 et en 2017, il a en
revanche gagné près de 9 minutes sur les 180 kilomètres du parcours vélo. Il a
utilisé le même vélo lors de ces
deux éditions mais, s'il portait en 2016 un casque en goutte d'eau classique,
il a opté en 2017 pour un casque
novateur, utilisant un flux d'air « aspiré » sur l'avant du casque, puis
réinjecté dans le dos du cycliste. L'objectif
de cette partie est de caractériser et de quantifier l'apport de ce casque.
Figure 10 Le casque à flux d'air utilisé par Patrick Lange lors de sa victoire
à l'Ironman de Kona en 2017
IT. À --- Modélisation du flux d'air autour du cycliste
On modélise l'écoulement de l'air autour du buste du cycliste, en dehors de la
couche limite, par un écoulement
d'air autour d'un cylindre, de rayon «a, de hauteur infinie et d'axe (Oz)
perpendiculaire au plan de l'écoule-
ment (figure 11). Le problème est invariant par translation suivant (Oz) et
l'écoulement est partout supposé
stationnaire, incompressible, homogène, parfait et irrotationnel. L'action de
la pesanteur est négligée. On note
P052/2023-03-16 11:04:50 Page 7/14 CHELLES
respectivement ü, = vie. et pY la vitesse et la pression loin en amont du
cylindre. Au voisinage du cylindre, en
coordonnées cylindriques d'axe (Oz), le champ des vitesses est de la forme ®, =
v.,(r,0)e, + v.o(r,0)e, et la
pression est notée p, (l'indice e faisant référence à l'extérieur de la couche
limite dont l'étude sera abordée dans
la sous-partie IL.B).
Po: Vo '
Figure 11 Modélisation de l'écoulement de l'air autour du cylindre
Q 27. Montrer qu'il existe un potentiel des vitesses 4 tel que v, = gradw et
vérifiant l'équation de Laplace
AG = 0.
Q 28. Pour l'écoulement uniforme, loin en amont, montrer que le potentiel des
vitesses & associé peut être
pris de la forme & = v,x. Caractériser alors les surfaces équipotentielles et
les lignes de courant.
On admet que le potentiel des vitesses du problème est donné par
a?
EM) = yr (: + SG) cos Ô
T
où r et 0 sont les coordonnées polaires d'axe (Oz) et 7 une constante positive.
Q 29 Déterminer l'expression de 7.
Q 30. Déterminer les composantes polaires v.. et v., du champ de vitesses vw...
Q 31. Montrer que les conditions aux limites à la surface du cylindre sont
vérifiées.
À partir de l'expression de w, un programme Python a permis de tracer la
représentation des lignes de courant
présentée sur la figure 12.
Figure 12 Tracé des lignes de courant
Q 32. Montrer, à partir de l'équation de Navier-Stokes et en précisant
clairement les hypothèses utilisées,
2
U
que la quantité " ---- D est constante et uniforme dans tout l'écoulement.
Q 33. En s'appuyant sur le tracé des lignes de courant de la figure 12, décrire
comment évolue la pression
dans l'écoulement au voisinage de la surface du cylindre pour x < 0 et pour x >
0.
II.B -- Comportement de la couche limite
Le cycliste utilise pour l'instant un casque aérodynamique profilé en goutte
d'eau. La trainée ne peut être
expliquée dans l'écoulement parfait et il faut prendre en compte les effets de
la viscosité dans la couche limite
dans laquelle les gradients de vitesse sont localisés. En dehors de la couche
limite, l'écoulement est celui d'un
fluide parfait. On l'appelle dans la suite écoulement extérieur par opposition
à l'écoulement intérieur à la couche
limite. La couche limite peut se décoller à partir d'un point, dit point de
décollement. Il apparait, en aval de
ce point, une zone de recirculation de fluide responsable d'une augmentation
sensible de la trainée. On suppose
que le décollement ne se produit que sur le dos du cycliste.
P052/2023-03-16 11:04:50 Page 8/14 (C2) BY-Nc-SA |
On se place ici dans le cas d'une couche limite laminaire, incompressible et
homogène. On note respectivement
ü et p la vitesse et la pression de l'écoulement dans la couche limite et w, et
p, la vitesse et la pression dans
l'écoulement extérieur. Loin en amont du cycliste, elles sont notées ü, et p,.
On note respectivement x" et y"
les coordonnées locales tangente (ou longitudinale) et normale à la surface de
l'obstacle, comme l'illustre la
figure 13.
écoulement extérieur
TT . . -
TT zone de recirculation de fluide
C
dos du cycliste
point de décollement
Figure 13 Évolution du champ de vitesse dans la couche
limite en amont et en aval du point de décollement
La courbure du dos du cycliste est supposée assez faible pour que la dérivation
dans le repère local (x", y') se fasse
comme dans un repère cartésien. On note respectivement v', et U, les
composantes longitudinale et transversale
de v. La dimension caractéristique dans la direction x" est notée L ; celle
dans la direction transversale y" est
notée ô(x") et nous la nommerons « épaisseur de la couche limite ».
Les hypothèses du modèle sont les suivantes :
(1) en amont du point de décollement, 0(x') & L :
(2) l'écoulement dans la couche limite est quasi-parallèle à la paroi (lu, EUR
|" |) ;
(3) les variations de vitesse dans la direction y" sont très supérieures à
celles dans la direction x", c'est-à-dire
Ov' Ou' O2 OZv"
x + L -- +
Ox' Oy'?
| lo
que « << Ox'2 La condition de raccord avec l'écoulement extérieur parfait, de nature asymptotique, se traduit par / v' (y = 6(x")) & v, et p(y" = ô(x')) & pe. II.B.1) Couche limite le long de la paroi La couche limite évolue sous l'action conjuguée de phénomènes de diffusion de quantité de mouvement dans la direction y" et de convection (ou advection) dans le sens x" de l'écoulement. Dans cette section, on néglige les effets de la pesanteur, les gradients de pression sont considérés nuls et l'écoulement est instationnaire. On considère, dans un premier temps, que l'écoulement dans la couche limite est unidirectionnel dans la direction longitudinale x", la vitesse ne dépendant que de la coordonnée y" dans la direction orthogonale à l'écoulement, d(y,t) = v'(y',t)é,, (figure 14). L'épaisseur de la couche limite ne dépend donc pas de x" et est notée à. / y Ve x' Figure 14 Écoulement unidirectionnel Q 34. Montrer que les phénomènes de diffusion de quantité de mouvement dans la couche limite sont décrits par une équation aux dérivées partielles de la forme F(v',) = DG(v!) où F'et G sont deux opérateurs aux dérivées partielles, respectivement temporel et spatial, à préciser et où D est un coefficient à exprimer en fonction de la viscosité dynamique 7 et de la masse volumique p de l'air. Quel nom donne-t-on à D ? P052/2023-03-16 11:04:50 Page 9/14 (C2) BY-Nc-SA | Q 35. Exprimer les temps caractéristiques Tuirr et Ton, de diffusion et de convection de quantité de mou- vement. Montrer que le nombre de Reynolds peut être interprété comme un rapport de ces deux grandeurs. Commenter. Q 36. En exprimant le fait que, dans la couche limite, le temps caractéristique de diffusion de quantité de mouvement sur la distance à est du même ordre de grandeur que le temps caractéristique de convection sur la distance L, montrer que la dimension transversale caractéristique de la couche limite est, en ordre de grandeur, # L \ - e e #' D e #' #' e donnée par à # VR où À, est un nombre de Reynolds qui sera assimilé à celui de l'écoulement extérieur EUR évalué à la question 1. Q 37. Déterminer un ordre de grandeur de l'épaisseur de la couche limite. On considère dans toute la suite que l'écoulement dans la couche limite est quasi-parallèle, comme représenté dans la figure 13. L'ordre de grandeur de la couche limite est celui évalué à la question précédente. Q 38. Compte tenu du résultat précédent, commenter les hypothèses (1), (2) et (3) du modèle. II.B.2) Décollement de la couche limite On se place toujours dans le cas où l'écoulement dans la couche limite est quasi-parallèle comme représenté dans la figure 13. Dans cette section, on néglige toujours l'effet de la pesanteur, mais on prend désormais en compte le gradient de pression. De plus, on admet que, tant que la couche limite n'a pas décollé, la pression dans la couche limite est indépendante de y" et que le gradient longitudinal de pression dans la couche limite suivant x" est imposé par l'écoulement extérieur, c'est-à-dire © L EE de. où p, est la pression dans l'écoulement extérieur. (Au-delà du point de décollement, ce modèle n'est plus valable, la composante v, n'étant plus négligeable.) On considère que l'écoulement dans la couche limite est stationnaire. Q 39. En utilisant l'équation de Navier-Stokes, montrer que le gradient de pression en x" et la concavité du profil de vitesse vérifient à la paroi Q 40. En analysant l'évolution de la concavité du profil de vitesse aux points À, B et C définis figure 13 ? . . O . . . . ? . . déterminer le signe de 5 L - en ces trois points. Donner une condition nécessaire sur ce signe pour observer le décollement de la couche limite. Q 41. En première approximation, on peut modéliser le dos du cycliste par un demi-cylindre (figure 15). En s'appuyant sur les résultats des questions 33 et 40, justifier que la couche limite peut décoller uniquement entre les points N et P, mais pas entre les points M et N. Ua à ( M Z Pt Figure 15 Profil et repère cartésien local (x',y') On s'intéresse à présent au comportement de la couche limite sur le dos du cycliste en amont du point de décollement. On considère la couche limite en régime stationnaire, d'écoulement bidimensionnel, les notations étant celles de la figure 13. La dimension dans la direction z orthogonale au plan de l'écoulement est notée L,. On définit D,,(x')/L, le débit massique par unité de longueur, où D,,(x') désigne le débit massique de l'écoulement réel au travers d'une section de la couche limite d'abscisse x" sur toute sa hauteur. On note alors Ô*(x") l'épaisseur de déplacement qui correspond à la perte de débit massique par unité de longueur AD,,,(x")/L, par rapport au cas d'un écoulement parfait sur la même section. Aïnsi l'épaisseur de déplacement apparait comme la hauteur dont il faudrait déplacer la paroi pour maintenir le débit massique inchangé dans un écoulement de fluide qui serait parfait (figure 16). On a donc AD,,,(x") = pL;v,0*(x). P052/2023-03-16 11:04:50 Page 10/14 CETTE Frontière de la couche limite x' Écoulement réel Écoulement parfait Figure 16 Épaisseur de déplacement On définit également P(x')/L,, la quantité de mouvement longitudinale à l'abscisse x" (en projection suivant le sens de l'écoulement) par unité de longueur. On note alors O(x') l'épaisseur de quantité de mouvement longitudinale qui correspond à la perte de quantité de mouvement longitudinale par unité de longueur AP(x")/L, dans la couche limite par rapport au cas d'un écoulement qui serait parfait (à débit massique donné). Ainsi, on a AP(x') = pL;v/6(x'). Q 42. Montrer que ô(x') 5" (x) -- | nu?) dy. 0 EUR Q 43. On note D,,(x') le débit massique à travers la section droite en x' de la couche limite et de largeur L,. Déterminer l'expression de D,,(x") en fonction de la masse volumique p, de la norme de la vitesse extérieure v., de la largeur L, de l'écoulement, de l'épaisseur Ô de la couche limite et de l'épaisseur de déplacement 0*. Commenter. On définit, sur une tranche de la couche limite entre x" et x" + dx', une surface de contrôle © représentée figure 17 (échelle verticale non respectée) par sa section longitudinale ABC'D. La largeur de l'écoulement est toujours prise égale à Z,. v, G Frontière de la couche limite | | | | | | | ee | A r ; 2 ---- Surface de l'obstacle TX x + dx Figure 17 Évolution de la couche limite entre +" et x" + dx' On constate que l'épaisseur de la couche limite augmente le long de la surface de l'obstacle suivant les x" croissants. Cela se traduit par l'existence d'un débit massique entrant D', à travers la frontière supérieure de la couche limite. On construit un système fermé délimité par une surface X* constitué, -- à l'instant t, du contenu matériel de Y(t) et de la masse entrante dans la surface de contrôle entre les instants t et t + dt. On note dm, la masse entrant par la trace AB et dm, , la masse entrant par la trace BC'; -- à l'instant { + dt, du contenu matériel de Y(t + dt) et de la masse sortant de la surface de contrôle par la trace CD entre les instants { et { + dt, notée dm... On admet par ailleurs que -- Ja force de frottement agissant sur ce système au niveau du contact avec l'obstacle (trace AD) s'écrit, projetée sur la direction x', df = --7,,L, dx où 7, est un coefficient appelé contrainte de frottement pariétale : -- Ja force de pression s'appliquant sur la partie supérieure du système (trace BC), projetée sur x", s'écrit , ,, dô(x' , pue) = pr) EL, dx P052/2023-03-16 11:04:50 Page 11/14 (C2) BY-Nc-SA | -- l'on peut négliger la composante de frottement agissant à travers la surface de la frontière supérieure de la couche limite (trace BC) : -- l'expression de la quantité de mouvement entrant en x" pendant dé, projetée sur x", est dP(x') = pu'(x')L,(5(x") -- 6*(x') -- 8(x')) dt où Ü(x") est l'épaisseur de quantité de mouvement définie précédemment, page 11. Q 44. Par un bilan de masse et de quantité de mouvement entre les instants t et t + dt sur le système fermé délimité par la surface X*, montrer qu'en se limitant au premier ordre, au (ter N(ar) -- a) -- 6) -- a) (one (er)(6()-- 64())) = RE 74 Q 45. En utilisant la relation de Bernoulli dans l'écoulement extérieur ainsi que le résultat de la question 39, montrer l'équation, dite équation intégrale de Von Karman, T. 1 dv dé Uw = = "ef 5* 1 9ÿ pu? v, dx' (6° +20) + dx' ---- Résolution de l'équation de Von Karman 2 On définit H -- 6*/20 le facteur de forme. On pose un paramètre sans dimension À = À, (7) dE de sorte qu'on puisse écrire H = H(À) et Eur -- S(A) où H(A) et S(À) sont des fonctions inconnues. L'analyse EUR empirique de nombreux résultats montre que l'équation de Von Karman peut se réécrire de façon approchée sous la forme 2(5(N) _ \(2+ H()) = F(X) où F()&045--6,0X Le tableau 3 fournit les valeurs de H(À) et S(À) pour différentes valeurs de À. À | H( | SX 0,0 2.61 | 0,220 0,040 | 2.81 | 0.153 0,064 | 3.05 | 0,104 0.076 | 3.38 | 0.067 --0,0808 | 3.61 | 0,030 --0,0820 | 3,70 | 0.0 Tableau 3 Table de corrélation pour H(À) et S(A) On admet que la couche limite adhère à la paroi tant que la contrainte de frottement pariétale r,, est positive et décolle quand 7,, s'annule. De plus, dans ces conditions, on admet que l'épaisseur de quantité de mouvement 0 de la couche limite laminaire sur le dos du cycliste de dimension longitudinale L satisfait aux relations suivantes, dans lesquelles le nombre de Reynolds est celui de la question 1. O(x')\* 0.0039 x (2) OR. S0< 7