
X/ENS Modélisation PSI 2010
| Thème de l'épreuve | Contrôle actif des vibrations dans les machines à réluctance variable |
| Principaux outils utilisés | électromagnétisme, automatique, mécanique, thermodynamique |
| Mots clefs | machine à reluctance variable, contrôle actif, vibration, modélisation, piézoélectricité |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)

















Énoncé obtenu par reconnaissance optique des caractères
Banque commune École Polytechnique -- ENS de Cachan
PSI
Session 2010
Épreuve de Modélisation
Durée : 5 heures
Aucun document n 'est autorisé.
Aucun dictionnaire n 'est autorisé.
L 'usage de calculatrice électronique de poche a alimentation autonome, non
imprimantes et
sans document d'accompagnement, est autorisé selon la circulaire n°99018 du ]"
février
1999 De plus, une seule calculatrice est admise sur la table, et aucun échange
n 'est autorisé
entre les candidats.
Contrôle actif des vibrations dans les machines
à réluctance variable
Figure 1: prototype expérimental d'un contrôle actif
d'une machine à réluctance variable
Les applications des moteurs électriques sont de plus en plus nombreuses, que
ce soit
en robotique (machines outils, robots,...), dans le domaine des transports (une
voiture actuelle
haut de gamme possède environ 80 moteurs électriques) ou encore en domotique.
De plus, les
cahiers des charges sont de plus en plus contraignants afin d'optimiser les
performances des
ensembles machine-alimentation-commande.
Les machines électriques sont de type très divers et leur constante évolution
ne permet
pas d'en faire un classement exhaustif. Parmi les machines électriques
classiques, il est
possible de citer les machines à courant continu, synchrones et asynchrones.
Ces trois types
de machines ont plusieurs points communs comme par exemple celui de présenter
un couple
sans ondulation.
Il existe un autre type de machine, dite à réluctance variable (MKV) dont le
couple est
dû à l'interaction mutuelle entre une partie fixe (bobines) et une partie
ferromagnétique
mobile. Ces dernières possèdent des caractéristiques très intéressantes :
simplicité de
fabrication, possibilité de géométries exotiques, robustesse, faible coût et
permettent
d'atteindre des vitesses très élevées, tout en ayant la possibilité de
développer un fort couple à
basse vitesse.
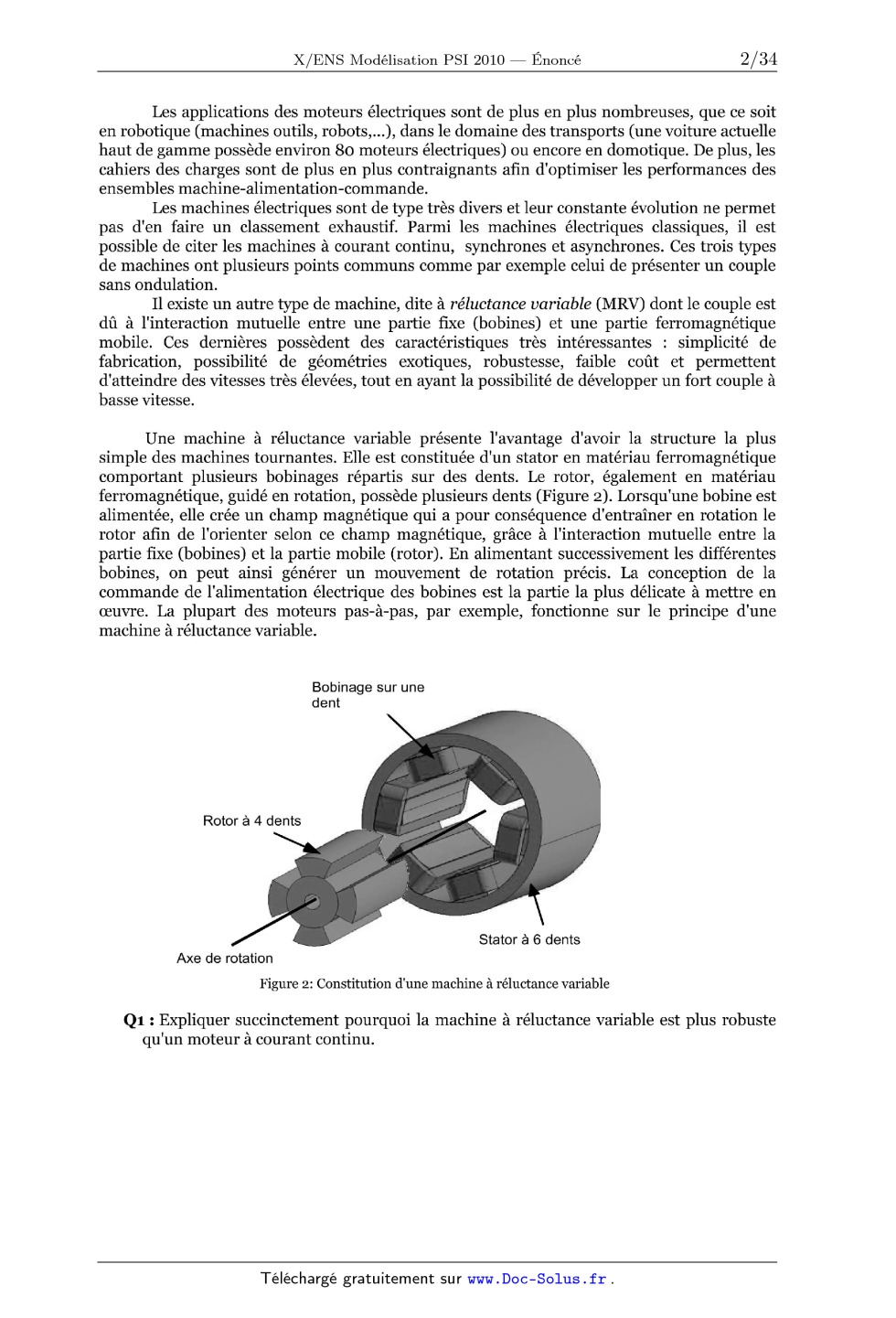
Une machine à réluctance variable présente l'avantage d'avoir la structure la
plus
simple des machines tournantes. Elle est constituée d'un stator en matériau
ferromagnétique
comportant plusieurs bobinages répartis sur des dents. Le rotor, également en
matériau
ferromagnétique, guidé en rotation, possède plusieurs dents (Figure 2).
Lorsqu'une bobine est
alimentée, elle crée un champ magnétique qui a pour conséquence d'entraîner en
rotation le
rotor afin de l'orienter selon ce champ magnétique, grâce à l'interaction
mutuelle entre la
partie fixe (bobines) et la partie mobile (rotor). En alimentant successivement
les différentes
bobines, on peut ainsi générer un mouvement de rotation précis. La conception
de la
commande de l'alimentation électrique des bobines est la partie la plus
délicate à mettre en
oeuvre. La plupart des moteurs pas-à--pas, par exemple, fonctionne sur le
principe d'une
machine à réluctance variable.
Bobinage sur une
dent
Rotor à 4 dents
Stator à 6 dents
Axe de rotation
Figure 2: Constitution d'une machine à réluctance variable
Q1 : Expliquer succinctement pourquoi la machine à réluctance variable est plus
robuste
qu'un moteur à courant continu.
L'inconvénient principal d'une machine à réluctance variable est le bruit
généré par son
fonctionnement. Le bruit correspond à une variation de la pression de l'air au
niveau des
oreilles pour des fréquences de 20 Hz à 20 kHz. Dans la machine à réluctance
variable, l'air
est mis en mouvement à haute vitesse essentiellement par des phénomènes
aérodynamiques
dus à la rotation des éléments tournants. A basse vitesse, les phénomènes
magnétiques
induisent des actions mécaniques sur le stator qui se déforme de manière
infinitésimale et de
façon cyclique. Ces vibrations mécaniques suffisent à entraîner un mouvement de
l'air et donc
une variation de la pression.
Pour diminuer le bruit dans ces machines, les ingénieurs ont proposé de
modifier la
stratégie de commande, d'optimiser la géométrie des machines ou de réaliser une
compensation active. C'est cette dernière solution que nous proposons
d'étudier. Elle consiste
à mesurer les vibrations du stator et à utiliser des actionneurs
(piézoélectriques) pour
produire un déplacement opposé au déplacement vibratoire, ceci aura pour
conséquence une
atténuation des vibrations.
Dans un premier temps, nous allons modéliser la machine à réluctance variable de
façon à identifier l'origine des vibrations et à proposer un modèle simplifié
du comportement
vibratoire de la machine. Ce modèle sera alors validé par la comparaison des
vibrations
simulées à partir de ce modèle et des vibrations mesurées. Dans un second
temps, nous
utiliserons ce modèle pour mettre en place une compensation active.
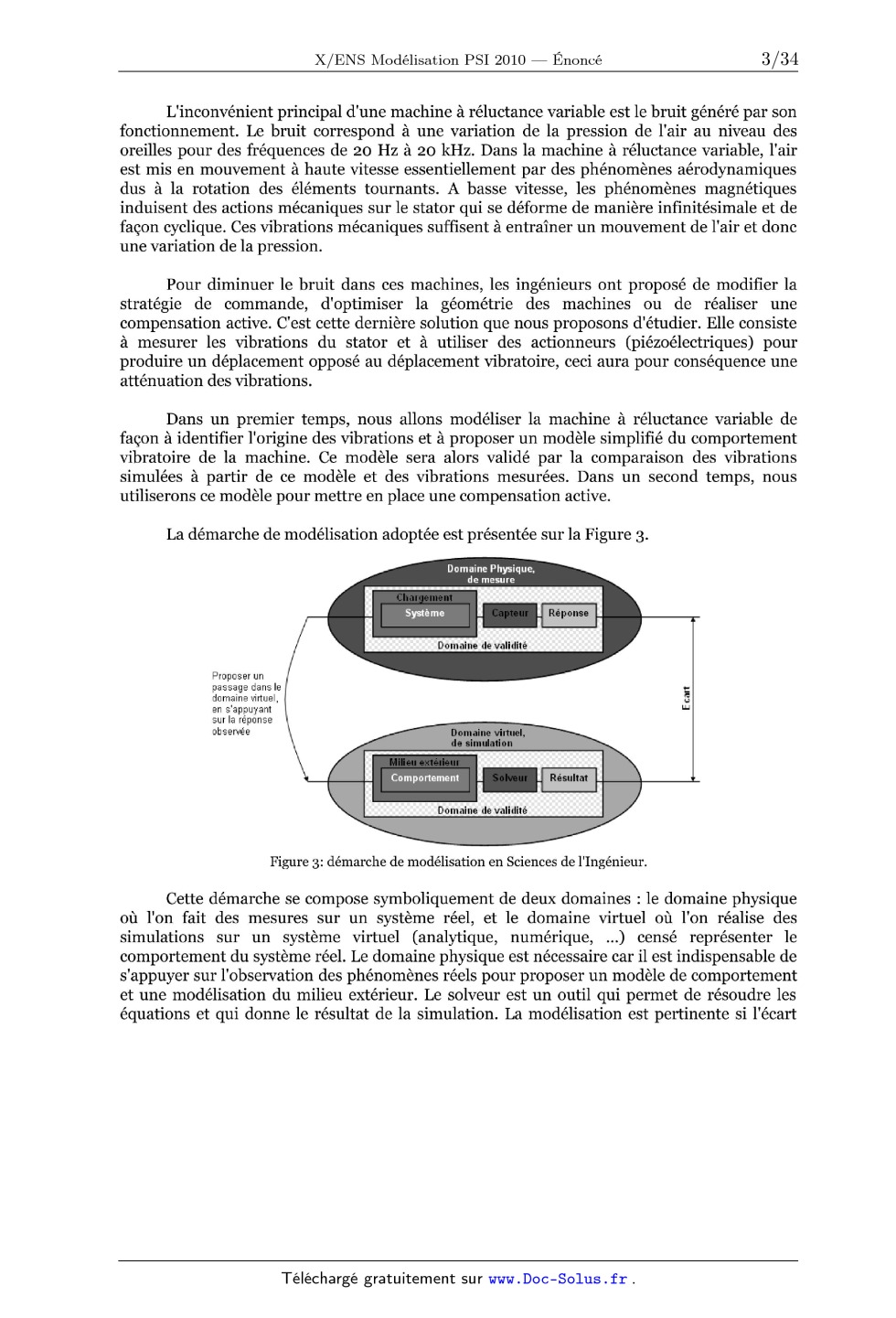
La démarche de modélisation adoptée est présentée sur la Figure 3.
Domaine Physique.
de mesure
| ...... l-=
Domaine de validité
Proposer un
passage dans le
domaine virtuel,
en s'appuyant
sur la réponse
observée Domaine virtuel,
de simulation
...
Domaine (le validité
Figure 3: démarche de modélisation en Sciences de l'Ingénieur.
Cette démarche se compose symboliquement de deux domaines : le domaine physique
où l'on fait des mesures sur un système réel, et le domaine virtuel où l'on
réalise des
simulations sur un système virtuel (analytique, numérique, ...) censé
représenter le
comportement du système réel. Le domaine physique est nécessaire car il est
indispensable de
s'appuyer sur l'observation des phénomènes réels pour proposer un modèle de
comportement
et une modélisation du milieu extérieur. Le solveur est un outil qui permet de
résoudre les
équations et qui donne le résultat de la simulation. La modélisation est
pertinente si l'écart
entre les réponses expérimentales et les résultats issus de la simulation est
petit.
Le sujet est divisé en quatre parties.
Dans la première partie, le fonctionnement de la machine à réluctance variable
est
étudié, ainsi que l'origine de la force magnétique sur le stator provoquant le
bruit.
La seconde partie s'intéresse à l'analyse et àla modélisation des vibrations
mécaniques
du stator. Dans cette même partie, les résultats de simulation du système
virtuel et le
comportement du système réel seront comparés afin de valider le modèle
théorique.
Les propriétés du matériau piézoélectrique utilisé pour les actionneurs du
contrôle actif
sont démontrées dans la partie trois. Ces actionneurs sont ensuite dimensionnés.
Enfin la quatrième partie porte sur la synthèse d'une commande des actionneurs
piézoélectriques afin de compenser les vibrations du stator.
Ces parties sont largement indépendantes. S'il le souhaite, le candidat pourra
tirer
profit de l'indépendance des parties. Il est cependant souhaitable de parcourir
tout le sujet
pour comprendre la démarche et l'enchaînement des questions.
Formulaire d'analyse vectorielle.
Soit Ü et 17 deux vecteurs de même dimension, u et v deux scalaires. << Ü _ ÿ» désigne le produit scalaire des vecteurs U et V et U /\ V désigne le produit vectoriel de ceux--ci. -->
. grad(Ü.U)=2(Ü.grad)Ü+2ÜA(r--OÎÜ)
. grad (u.v)=u. grad (v)+v. grad (u)
Formulaire trigonométrique.
Pour tout (i , j) EUR |N* >< |N*, . Icos(i6)sin(j6)d6=0, 9 2 =2 cos(i6)cos(j9)d6=nà . y, n°--° 9 O . Isin(i9)sin(j6)d9=nôij, 9=0 avec ôÿ symbole de Kronecker tel que où.: 1 et (Si]: 0 si i # j. Partie 1 : Fonctionnement de la MRV et observation des phénomènes mis en jeux L'objectif de cette partie est de comprendre le fonctionnement de la MRV et d'analyser les phénomènes magnétiques mis en jeu, à l'origine des vibrations et du bruit. Afin de comprendre le principe de fonctionnement de la machine à réluctance variable (MRV), seule la machine de type monophasée représentée sur la Figure 4 sera considérée dans cette partie. On notera C...g le chemin magnétique moyen associé au circuit magnétique. Ce chemin est composé d'une longueur moyenne '... de matériau ferromagnétique et d'une longueur totale d'entrefer, dépendant de l'angle 9, notée EUR (9 )E l 6 . ; EUR...OEl. La longueur totale mm du chemin magnétique fermé est donc lm+ @ (9). Le matériau ferromagnétique est de splitéabilité relative HT (on note #0 la splitéabilité du vide assimilée à celle de l'air) et sera supposé non saturé dans l'ensemble du sujet. On appelle Ë l'excitation magnétique et Ë le champ magnétique associé. On supposera que ces deux vecteurs sont constants le long du chemin magnétique (H B dans le matériau ferromagnétique et H air, Bai, dans l'entrefer). mat ' mat La section moyenne du stator est notée 55 et la section d'entrefer, notée SE (9) et dépendante de l'angle 9, correspond quant à elle à la section équivalente en regard entre le stator et le rotor. Pour simplifier l'étude, on négligera les flux de fuite, ainsi que les effets de bord, mais en revanche, on supposera que cette section d'entrefer varie en fonction de 9 , d'un minimum SE ... à un maximum SE mm. Le bobinage comportant n spires est alimenté par une tension U et un courant I et possède une résistance globale R L. ' . ., : "Ü ..- '--| Ü ! __. : ".nm--u Rotor x...--......-- .. .. .. .. .. .. .. .. .. 1--- ; "--.. ["--_ Stfltûr Figure 4: Structure d'une machine à réluctance variable monophasée. Q2 : Donner le théorème d'Ampère. En déduire la valeur de (fic Ü . âl . On rappelle que le mag matériau magnétique est non-saturé. Le chemin magnétique s'appuyant sur un tube de champ magnétique, montrer que le flux traversant une spire de la bobine
s'écrit
S
=#nl.
'f"+ SS (9)
_ EUR
Q3 : La réluctance magnétique R du montage est définie par la relation R qb=n ].
Justifier alors le nom de machine à réluctance variable. Donner la relation
entre la
réluctance magnétique et l'inductance magnétique L définie par L I = n 4). En
fonction
de l'angle 9 variant de 0 à 2n', donner le tableau de variation des fonctions
e(9)et
SE (9) (l'expression de ces deux fonctions n'est pas demandée). En déduire
l'intervalle
{L... ; L...æ] dans lequel varie l'inductance au cours du mouvement du rotor.
Q4 : Expliciter la loi de Faraday et donner la loi des mailles pour le circuit
électrique.
Un bilan de puissance va être réalisé sur l'ensemble du circuit afin de
déterminer le couple
électromagnétique appliqué au rotor.
: Wm (CI) ; 9).
A partir du
bilan de puissance de la question précédente et de la loi des mailles, montrer
que le
courant et le couple sont donnés par les relations, pour tout angle 9 et tout
flux
magnétique :
aw (,9)
1="'-- et o=-m_ .
a
élémentaire. On note (fñ ; t ; fñ /\ 35), le repère de Frénet associé àla
normale ñ àla surface d S
ainsi qu'à la décomposition Ü = H" ñ + Ht Î. Pour simplifier les notations, on
pourra écrire
ñ = ", 55 + ny ÎÏ + n, 5 et ? = tx 55 + ty ? + @ 5 (il n'est pas demandé
d'expliciter les composantes
de rfi et f).
Q11 : Montrer que la force surfacique d ? ne possède pas de composante selon le
vecteur
ñ/\ ?. Montrer alors que d Î7 s'écrit sous la forme d ? = d Fn ñ + d F,? avec
1 2 2
dF =--u(H --H
2 n É
n
dS et d FÊ= # HflHÊ dS_
On considère désormais la surface du stator (interface matériau ferromagnétique
-- air).
Afin de déterminer la force sur cette interface, les relations de passage du
champ et de
l'excitation magnétique entre deux milieux sont étudiées. On note Hair = Llo la
splitéabilité de
l'air et ufer = #. uo celle du matériau ferromagnétique.
Q12 : Établir que la composante normale du champ magnétique est conservée
B = B = B". De plus, en négligeant la densité de courant surfacique sur la
surface
n , air n , fer
du matériau ferromagnétique, montrer que la composante tangentielle de
l'excitation
magnétique est conservée Ht , = Ht = Ht.
, a7Ç fer
L'interface séparant deux domaines est assimilée à un volume d'épaisseur
négligeable
\
6 1, dont les propriétés électromagnétiques évoluent de manière continue d'un
domaine a
l'autre.
Figure 5: Définition de l'interface entre les
deux milieux
Q13: Montrer que la force appliquée à l'interface est normale à celle-ci,
dirigée du
matériau magnétique vers l'air et qu'elle s'exprime grâce à une pression normale
1 2 1 1 ?
p,=-- B ------ --Ht(u
n, n _" ) '
2 u . uf....
air fer
LM 7'
Q14 : La splitéabilité relative du matériau ferromagnétique composant le stator
étant de
l'ordre de 500, est considérée comme forte. Montrer que cette pression Pn peut
se
2
B
"
1
rédu1re àl'expressmn p =--
'ÏL 2
"air
Ainsi, cette première partie a permis de mettre en évidence le principe de
fonctionnement d'une machine à réluctance variable, mais aussi la présence
d'une force
magnétique répartie, purement radiale agissant sur la surface du stator et qui
comme le
montrera la partie suivante est à l'origine des vibrations mécaniques du stator
et donc du
bruit.
Partie 2 : Analyse des vibrations mécaniques
L'objectif de cette partie est de montrer par un modèle simple que les efforts
magnétiques sont à l'origine des vibrations du stator.
Le bruit généré par la rotation de la MRV est dû à un déplacement de l'air qui
se
répercute au niveau des tympans. Les vibrations du rotor engendrent des
déplacements d'air
confinés à l'intérieur du stator et ont donc peu d'influence sur le bruit. Par
contre, les
déformations du stator ne peuvent pas être négligées et sont à l'origine du
bruit engendré par
la MRV.
Pour analyser les vibrations du stator, on simplifie la géométrie de celui--ci
de manière à
pouvoir obtenir des résultats analytiques et développer une démarche
systématique pour la
compensation active. Les résultats obtenus par ce modèle simplifié seront
ensuite comparés
aux résultats expérimentaux. Toutes les étapes présentes dans le domaine
virtuel de
simulation de la démarche de modélisation (voir Figure 3), rappelées dans la
Figure 6, seront
traitées.
Comportement Résultat
Domaine de validité
Figure 6 : étapes du domaine virtuel de la démarche de modélisation.
Modélisation de la éométrie et de la cinémati ue
On considère que le stator est assimilable à un cylindre creux de rayon moyen R.
Seules les déformations dans un plan perpendiculaire à l'axe du cylindre sont
importantes,
c'est pourquoi on se limite à l'étude d'une couronne dans le plan ( O , î , ÿ)
(Figure 7).
La couronne subit des déformations dues à l'application d'actions mécaniques
sur sa
périphérie. Le cercle de rayon R (cercle médian), appelé ligne neutre, ne se
déforme pas.
Le stator est assimilé à un système matériel continu dont chaque section
perpendiculaire àla
ligne neutre subit un mouvement de solide rigide avec :
o A un point de la ligne neutre de coordonnées polaires (R , 9) (R constant, 0
S 9 5 2 rr),
. Ü (9 ; t) = % (9 , t) 'êR+ % (9 ; t) EUR.), le déplacement du point A,
. et y (6 , t) la rotation autour de (A , ?) de la section droite.
Modèle
simplifié
Ligne /Ïjn.
Figure 7: Modélisation de la géométrie
On note (r , @) les coordonnées polaires du point A après déplacement (point A')
(Figure 8).
Onpose r=R+6 Ravec 6 R<z
%: ùR(6 , t)ëR+ù9(9 , t)?a, A
Modélisation des actions mécaniques extérieures
Le champ magnétique est à l'origine d'une action mécanique que l'on peut
modéliser
par une densité linéique de force s'exerçant sur la ligne neutre :
Î(9 ; t)=fR(9 ; 7Ï) ËR+fg(9; t) Ë9 au niveau du pointA (élément de longueur ds
=R d 9).
dÏ'(6,t)=fR(6, t) dsêR+f9(9, t) dgë,
-->
0 A
mécaniques extérieures correspondant. Cette densité linéique de force développe
une
On note [dTeæft}= le torseur d'actions
pu1ssance P ex,.
Q18 : Donner l'expression de la puissance des efforts extérieurs POE et montrer
qu'elle
OO
s'écrit sous la forme POE=Z(FA(t)ÀH(t)+FB (t)B (t) où on précisera les
t n
n=1
expressions de FA (t) et FB ....
Modélisation du comportement
Les efforts intérieurs à la couronne (induits par les déformations des lignes
autres que
la ligne neutre) développent une puissance P,
, et dérivent d'un potentiel E tel que
n P
--dE
P_ t: p . On peut montrer que l'énergie potentielle correspondante est donnée
par la
'LTL dt
. 1 00 2 2 2 2 ,
relat10n : Ep(t)=5 R Cp1T 2 (n --1) (An(t) + Bn(t) ) avec Cp une constante
dependant du
n=1
matériau et des propriétés géométriques de la couronne.
On appelle p la densité linéique de masse telle que dm = p R d 9 avec dm
l'élément de
masse autour du point A. On note E C l'énergie cinétique de la couronne.
Q19 : Donner l'expression de l'énergie cinétique d'une section droite de la
couronne
sachant qu'on néglige l'énergie cinétique de rotation devant l'énergie
cinétique de
translation des sections. Montrer ensuite que l'énergie cinétique totale de la
couronne
1 °° 1
statorique s'écrit sous la forme : E C (t) = ;p R "IT z 1 + --2
n= 1 'n,
(A (Ë)2+Bn (t)2). On pourra
n
utiliser le formulaire de trigonométrie donné en début de sujet.
On constate alors que l'énergie cinétique, la puissance des efforts intérieurs
et la
puissance des efforts extérieurs font intervenir les termes An et B" de manière
découplée.
Ces termes sont donc indépendants et peuvent être traités séparément.
Q20 : Énoncer le théorème de l'énergie cinétique appliqué à la couronne et, en
traitant
séparément les termes en An et B", montrer que le théorème de l'énergie
cinétique
conduit aux équations différentielles suivantes :
1
. pR1T 1+--2 Àn(t)+RCpn(n2--1)2Àn(t)=FAn(t) (eq1),
TL
1 -- 2 2 _
. pR1T 1+--2 Bn(t)+RCP1T(f/z --1)Bfl(t)--FBn(t) (eq2).
TL
Résolution des équations sans second membre
Les modes propres correspondent aux solutions de ces équations différentielles
sans
second membre. On cherche alors les pulsations propres wn telles que An (t) :
An EURXP @ (Un t)
ou Bn ...: 3" EURXP (.7 (Un t).
Q21 : Donner l'expression de (Un en fonction de n , Cp , P.
Q22 : Donner l'expression du déplacement ü (6 , t) pour le mode 72 = 1.
Justifier alors que
le mouvement correspondant au mode n = 1 est un mouvement de solide indéformable
pour la couronne statorique.
Une simulation par éléments finis (méthode numérique utilisée en Sciences pour
n 'ni ur un r' u uiv n n rn n r mi r m r r
l'I e e ) do e les es ltats s a ts co ce a t les e e s odes 0 es de la
couronne statorique en prenant en compte les dents (déplacement radial u R
uniquement).
Cette simulation fournit une très bonne approximation des modes propres réels
du stator.
Mode propre 2 : 3_6 KHz Mode propre 3 : 10.3 KHz
Mode propre 4 : 16.4 KHz Mode propre 5 1 22-3 KHZ
Figure 9: Modes propres de la couronne statorique « réelle » : En trait fin, la
structure initiale
avant déformation. En foncé, la structure déformée.
Q23 : Calculer les fréquences propres théoriques pour les modes 2 à 5. On
prendra un
C 1
rapport I' _ w 1362 Hz- Comparer les fréquences obtenues et les fréquences
propres
p2rr
du stator « réel ». Commenter les résultats obtenus.
Q24 : Donner l'expression du déplacement radial UR(9 ; t) pour les modes 2 et 3
en
prenant des amplitudes A2(t)=A3(t)=uo>0 et BQ(Ë)=Bg(Ë)=Û. Donner les angles
pour lesquels le déplacement est maximal, minimal et nul. Tracer, en utilisant
les
coordonnées polaires, l'allure de la couronne cylindrique théorique déformée
pour ces
deux modes et comparer l'allure obtenue avec celle du stator déformé obtenu sur
la
Figure 9. Faire apparaitre sur ce tracé la couronne avant déformation.
Résolution des équations avec second membre.
La partie 1 a permis de montrer que les efforts magnétiques, pour une phase de
fonctionnement donnée, se réduisaient à une composante radiale uniquement,
située au
niveau de deux dents diamétralement opposées. Compte tenu de cette symétrie
d'efforts, tous
les modes ne sont pas excités, l'expression du déplacement peut être simplifiée.
On suppose que le courant d'excitation est sinusoïdal de pulsation w. On
s'intéresse
dans un premier temps à l'action mécanique exercée sur une dent uniquement. La
densité
d'effort radial peut alors s'écrire au niveau d'une dent (située à 9 =0)
f R (9 , t ) = f 0 Sin ((U t) 6 (9) où 6 (9) représente la distribution de
Dirac. La densité d'effort
tangentielle f 9 (6 , t) est nulle. En injectant ces deux densités dans les
expressions de F A. (t)
et F B,... obtenues précédemment, on montre que A,,(t) et B,,(t) vérifient les
équations
différentielles suivantes :
pR1T 1+l2 Àn(t)+RCpn(n2--1)2An(t)=f0sin(wt)R;
n
pR1T 1+l2 Ën(t)+RCpn(n2--1)2Bn(t)=o_
n
Q25 : Déterminer les expressions de An(t) et B"... en régime établi (on suppose
les
conditions initiales nulles). u'observe-t-on lors ue «) tend vers w ?
n
Dans le cas d'une excitation de même amplitude sur deux dents opposées,
fR(9, t)=fÛsin(w t)ô(9)+fÛsin(wt)ô(G--n)_
Q26 : Donner la nouvelle expression du second membre F A. (t), en déduire
l'expression de
An(t) en régime établi et montrer que seuls les modes pairs sont excités.
Préciser
notamment l'amplitude de An (t) et la comparer à celle obtenue pour une
excitation sur
une seule dent.
On utilisera, pour déterminer F A..... la propriété de la distribution de Dirac
:
9=2n
] 5 (e--9ü) f (a) d 6=f (@@) pour tout angle 9..-
9 0
Dans le fonctionnement réel de la MRV, le courant d'excitation n'est pas
sinusoïdal. Le
déplacement résultant des actions mécaniques est alors plus complexe.
Cependant, on
constate en réalisant une décomposition de Fourier de cette densité de force
que le mode n = 2
est prépondérant devant les autres modes. De plus, pour ce mode n=2, la
composante
tangentielle du déplacement est négligeable devant la composante radiale.
On a donc montré dans cette partie, à l'aide d'un modèle simple, que des
vibrations
sont engendrées par les eflorts magnétiques. Ces vibrations peuvent être
modélisées par un
déplacement radial de la couronne statorique de la forme : Ü (9 ; t) = A ...
COS (2 9) ëR -
Partie 3 : Compensation active par actionneurs
piézoélectriques
Le principe de base de la compensation active des vibrations d'une structure
consiste, à
l'aide d'actionneurs collés à la surface d'une pièce, à appliquer une
déformation contraire à la
déformation perturbatrice afin d'avoir un déplacement nul au final pour tous
les points de la
structure. Le contrôle actif des vibrations nécessite la mise en place d'un
asservissement : un
correcteur fournit la tension d'alimentation de l'actionneur à partir d'une
mesure réalisée par
des capteurs utilisés pour connaître la déformation réelle de la structure.
Les pastilles de matériau piézoélectrique possèdent des propriétés
particulièrement
intéressantes pour ce type d'asservissement.
Dans cette partie, nous modéliserons le comportement de ces matériaux dans un
premier temps puis nous utiliserons ce modèle pour analyser l'eflet d'une lame
piézoélectrique collée sur le stator et pour choisir les caractéristiques des
actionneurs
piézoélectriques du contrôle actif.
Modélisation du comportement piézoélectrique
Le phénomène de piézoélectricité apparaît dans certains matériaux constitués de
cristaux de Quartz ou dans des céramiques ferroélectriques. Si le cristal ne
possède pas de
centre de symétrie pour les charges du réseau cristallin, alors le phénomène de
piézoélectricité
peut exister.
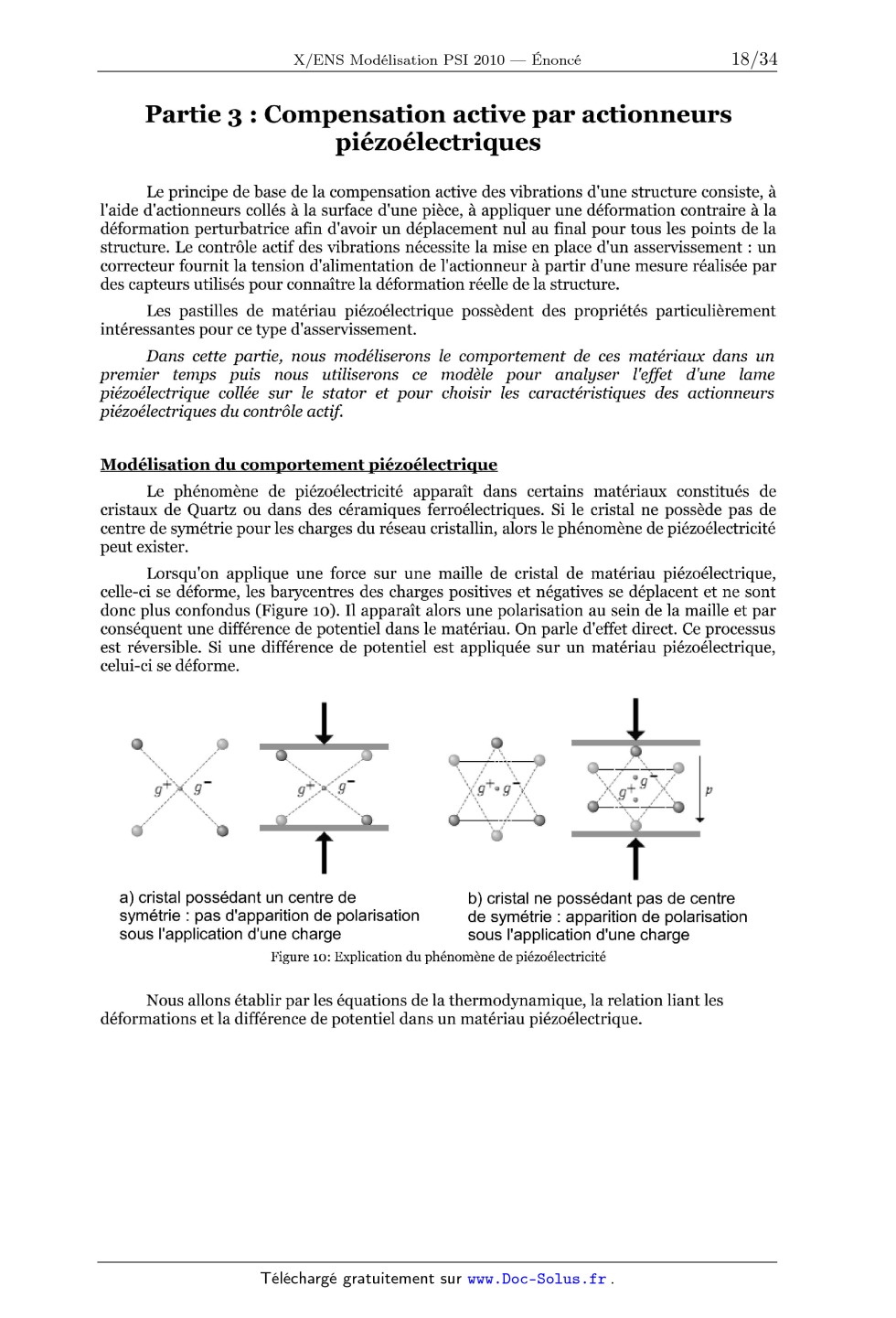
Lorsqu'on applique une force sur une maille de cristal de matériau
piézoélectrique,
celle--ci se déforme, les barycentres des charges positives et négatives se
déplacent et ne sont
donc plus confondus (Figure 10). Il apparaît alors une polarisation au sein de
la maille et par
conséquent une différence de potentiel dans le matériau. On parle d'effet
direct. Ce processus
est réversible. Si une différence de potentiel est appliquée sur un matériau
piézoélectrique,
celui-ci se déforme.
Ü ' _"--___ , _°
q"ÏL . @" q%xiru.:_qu' "gt-"« .c;' jj:----:_jig--:'f _,=---::j ;!
a) cristal possédant un centre de b) cristal ne possédant pas de centre
symétrie : pas d'apparition de polarisation de symétrie : apparition de
polarisation
sous l'application d'une charge sous l'application d'une charge
Figure 10: Explication du phénomène de piézoélectricité
Nous allons établir par les équations de la thermodynamique, la relation liant
les
déformations et la différence de potentiel dans un matériau piézoélectrique.
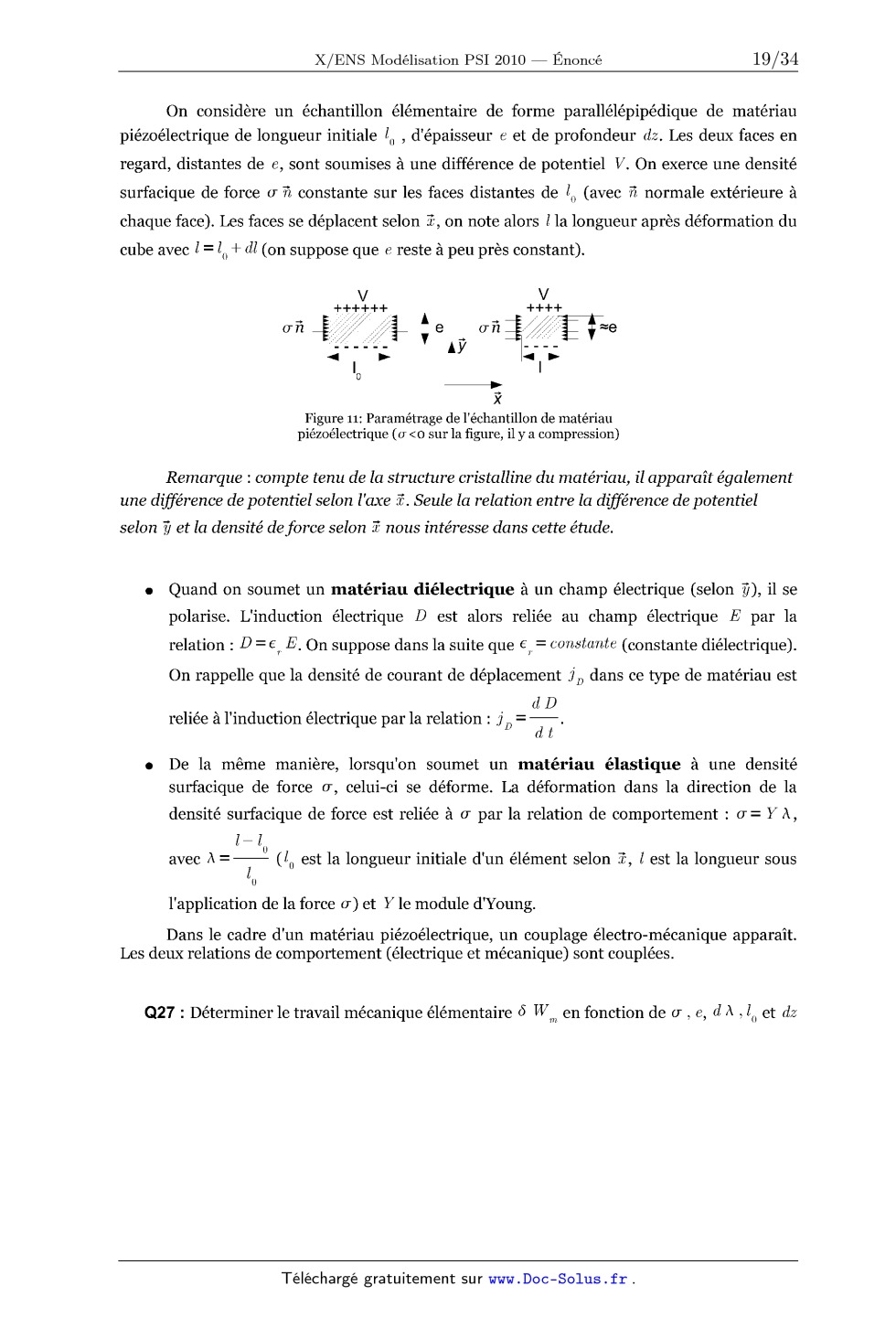
On considère un échantillon élémentaire de forme parallélépipédique de matériau
piézoélectrique de longueur initiale 10 , d'épaisseur e et de profondeur dz.
Les deux faces en
regard, distantes de 6, sont soumises à une différence de potentiel V. On
exerce une densité
surfacique de force a % constante sur les faces distantes de 10 (avec n normale
extérieure à
chaque face). Les faces se déplacent selon î, on note alors 1 la longueur après
déformation du
cube avec l = 10 + dl (on suppose que 6 reste à peu près constant).
V V
++++++ ++++
añ â%/...Ë $e ÿ añämäze
'? L_ '?
Figure 11: Paramétrage de l'échantillon de matériau
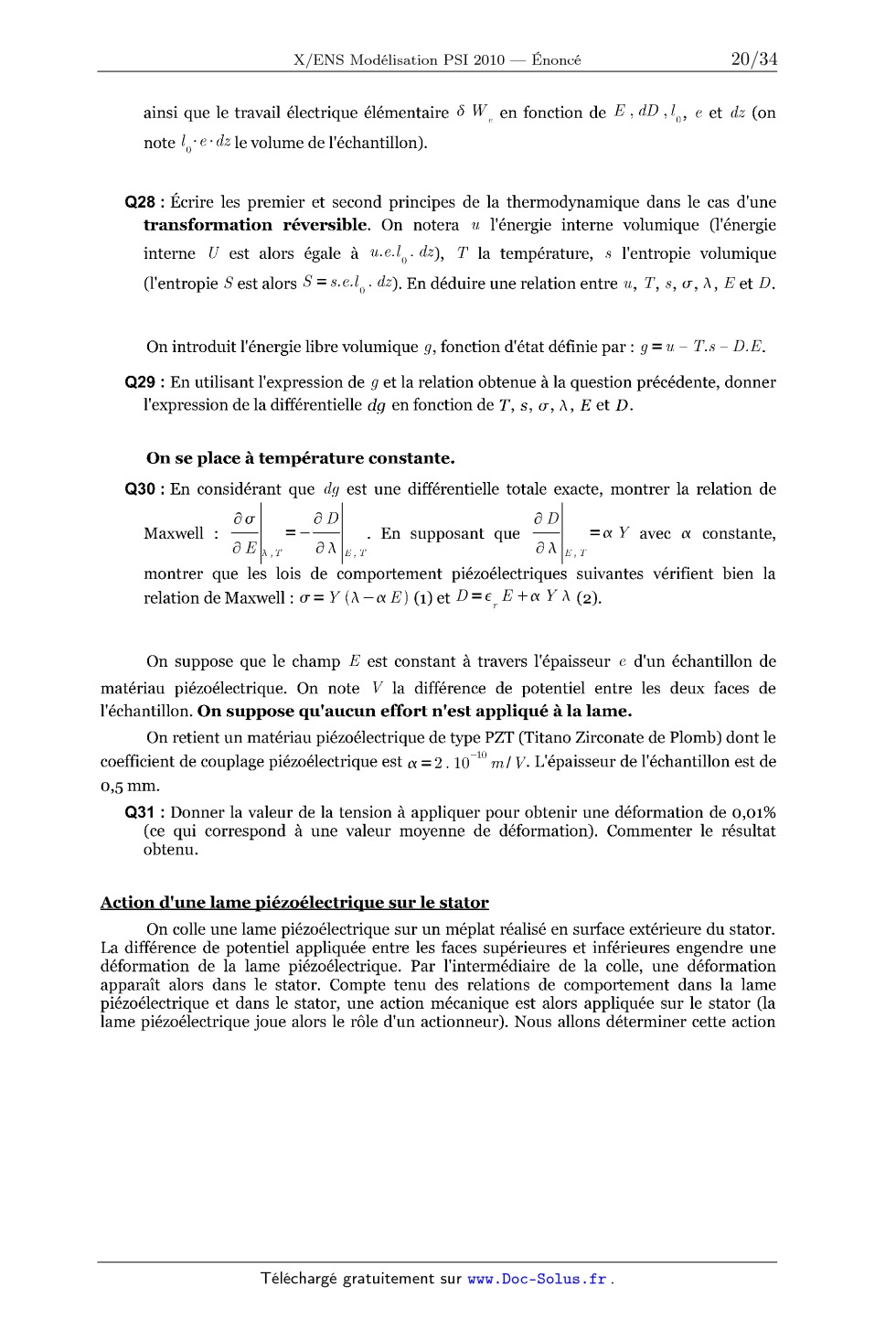
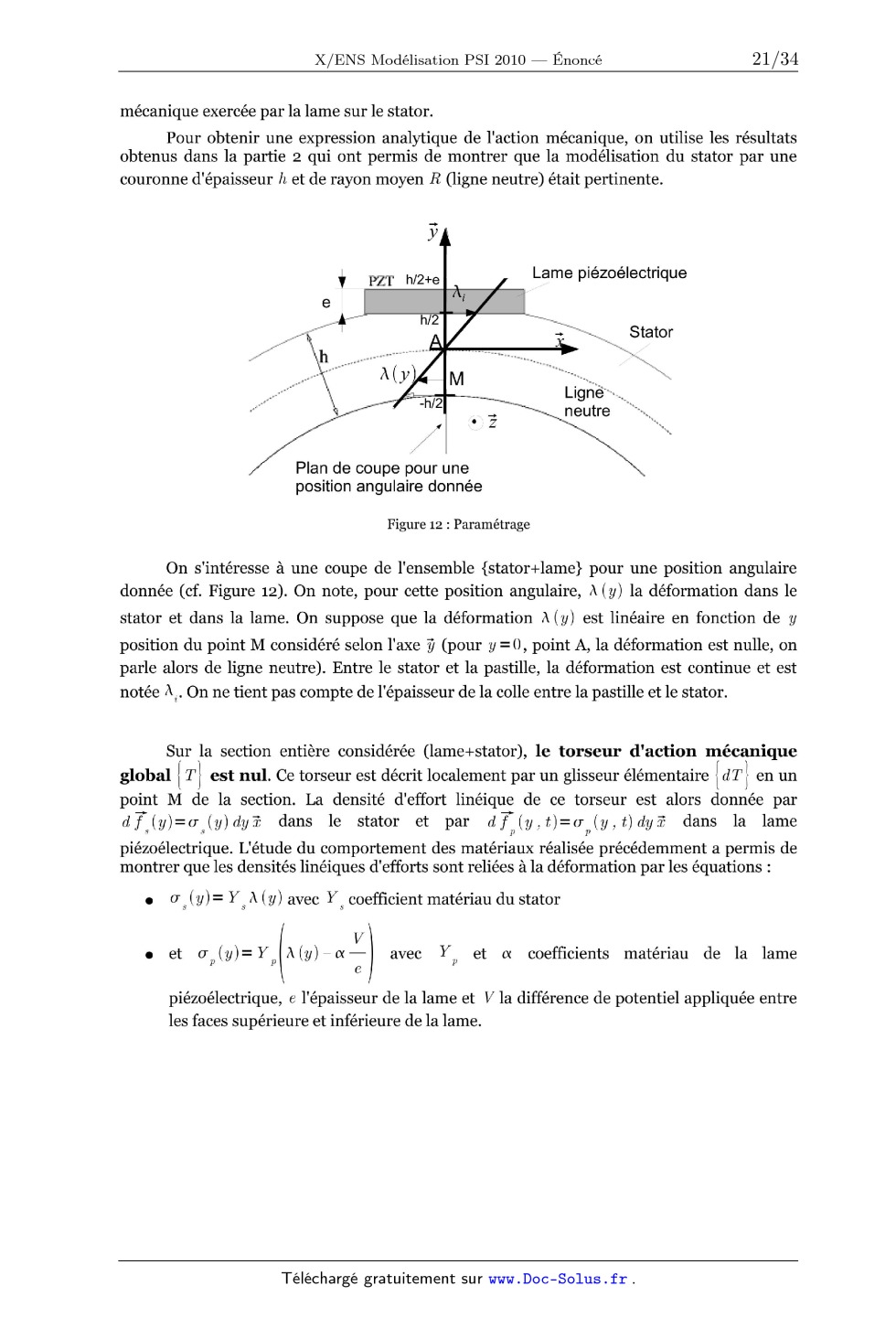
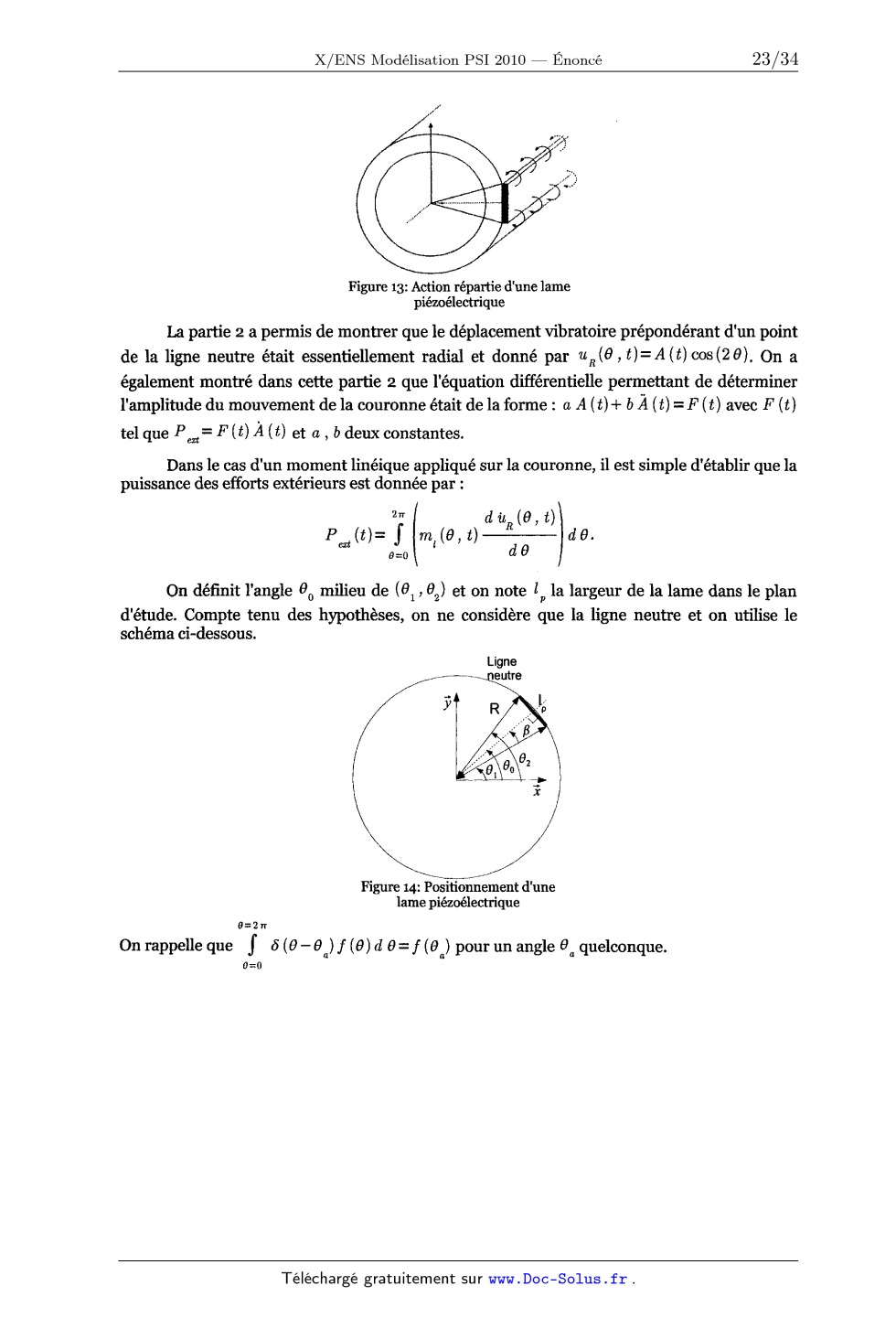
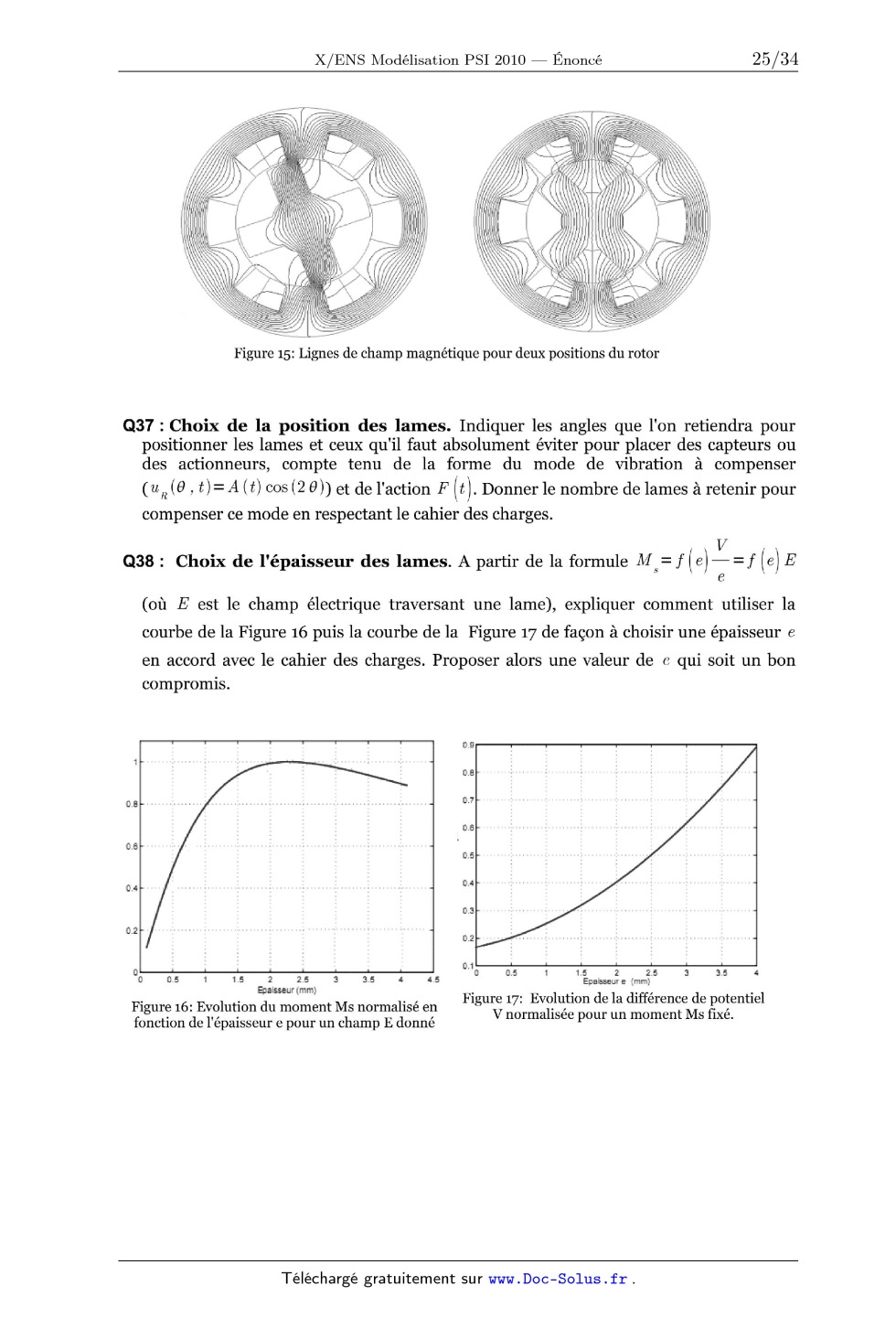
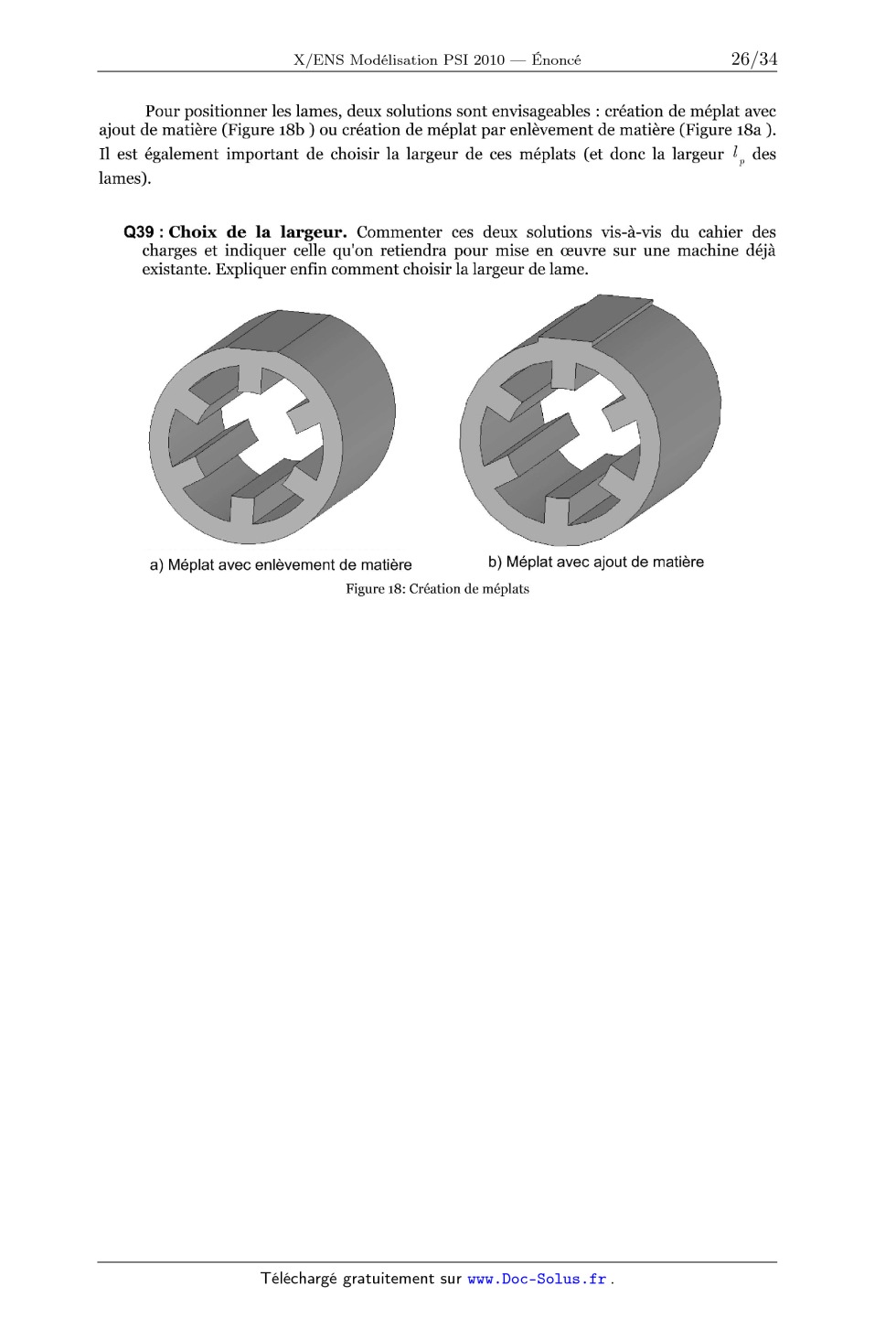
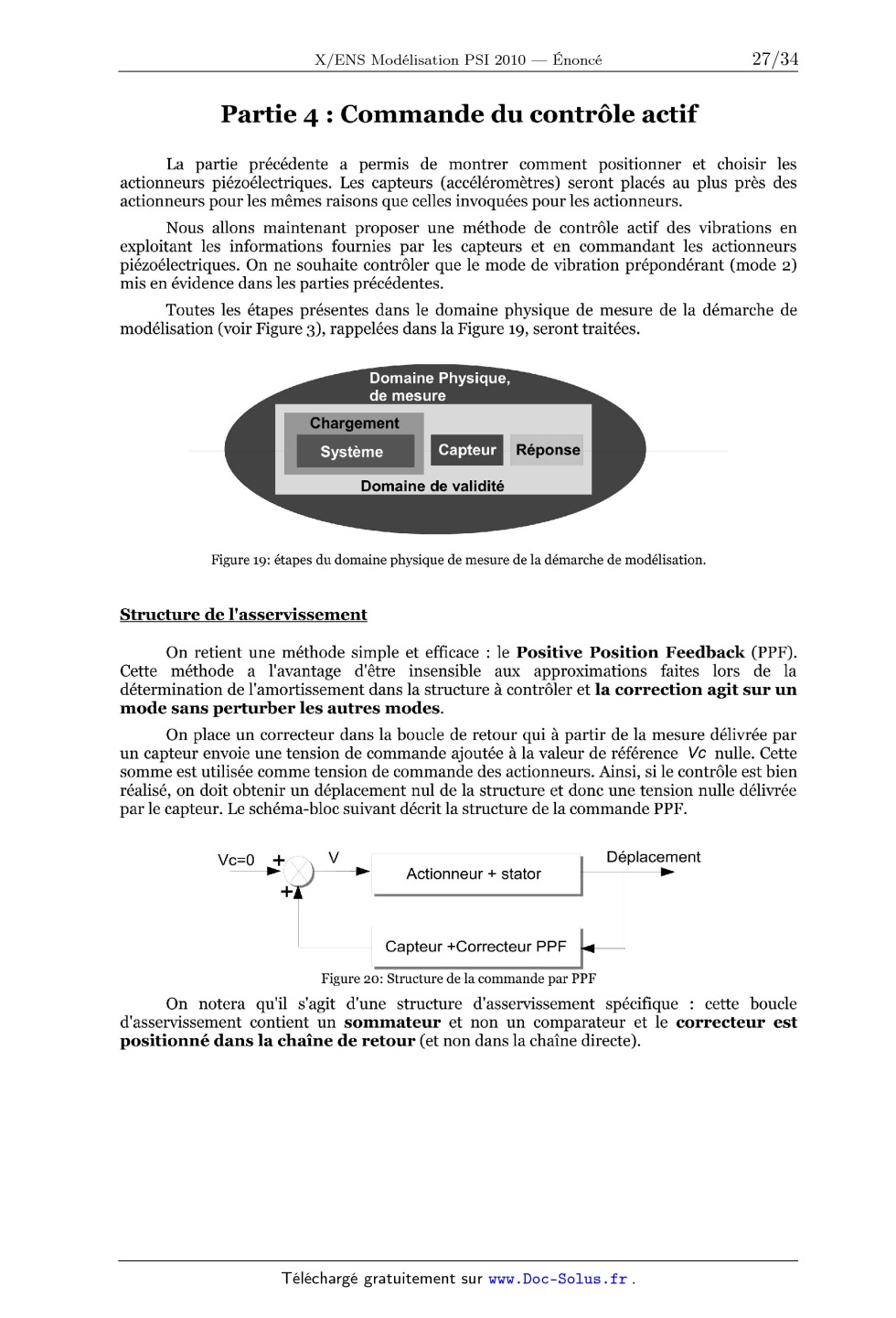
piézoélectrique (0 <0 sur la figure, il y a compression) Remarque : compte tenu de la structure cristalline du matériau, il apparaît également une diflérence de potentiel selon l'axe 55 . Seule la relation entre la diflérence de potentiel selon ?) et la densité de force selon 55 nous intéresse dans cette étude. 0 Quand on soumet un matériau diélectrique à un champ électrique (selon ÿ), il se polarise. L'induction électrique D est alors reliée au champ électrique E par la relation : D = ET E. On suppose dans la suite que ET = COnstante (constante diélectrique). On rappelle que la densité de courant de déplacement % dans ce type de matériau est dl) reliée à l'induction électrique par la relation : jD = d--. t \ 0 De la même manière, lorsqu'on soumet un matériau élastique a une densité surfacique de force a, celui-ci se déforme. La déformation dans la direction de la densité surfacique de force est reliée à a par la relation de comportement : a = Y A, 1--1 0 avec A = (l() est la longueur initiale d'un élément selon 55, l est la longueur sous l 0 l'application de la force a) et Y le module d'Young. Dans le cadre d'un matériau piézoélectrique, un couplage électro--mécanique apparaît. Les deux relations de comportement (électrique et mécanique) sont couplées. Q27 : Déterminer le travail mécanique élémentaire 5 W... en fonction de a , e, d A , 10 et dz ainsi que le travail électrique élémentaire 5 W, en fonction de E , EUR... 710, e et dz (on note 10° 6 ' & le volume de l'échantillon). Q28 : Ecrire les premier et second principes de la thermodynamique dans le cas d'une transformation réversible. On notera u l'énergie interne volumique (l'énergie interne U est alors égale à u.e.lo. dz), T la température, 8 l'entropie volumique (l'entropie S est alors 5 = 8-6.10- dz)_ En déduire une relation entre u, T, 8, o, A, E et D. On introduit l'énergie libre volumique g, fonction d'état définie par : g = u -- T.s -- DE. Q29 : En utilisant l'expression de g et la relation obtenue àla question précédente, donner l'expression de la différentielle dg en fonction de T, s, o, A, E et D. On se place à température constante. Q30 : En considérant que dg est une différentielle totale exacte, montrer la relation de 8 0 8 D 8 D Maxwell : -- =---- . En supposant que -- =(x Y avec & constante, ÔEA,T ÔÂE,T ÔÂE.T montrer que les lois de comportement piézoélectriques suivantes vérifient bien la relation de Maxwell: o = Y (A --o< E) (1) et D =E, E +0< Y A (2). On suppose que le champ E est constant à travers l'épaisseur @ d'un échantillon de matériau piézoélectrique. On note V la différence de potentiel entre les deux faces de l'échantillon. On suppose qu'aucun effort n'est appliqué àla lame. On retient un matériau piézoélectrique de type PZT (Titano Zirconate de Plomb) dont le coefficient de couplage piézoélectrique est a = 2 , 10_10 m/ V. L'épaisseur de l'échantillon est de 0,5 mm. Q31 : Donner la valeur de la tension à appliquer pour obtenir une déformation de 0,01% (ce qui correspond à une valeur moyenne de déformation). Commenter le résultat obtenu. Action d'une lame piézoélectrique sur le stator On colle une lame piézoélectrique sur un méplat réalisé en surface extérieure du stator. La différence de potentiel appliquée entre les faces supérieures et inférieures engendre une déformation de la lame piézoélectrique. Par l'intermédiaire de la colle, une déformation apparaît alors dans le stator. Compte tenu des relations de comportement dans la lame piézoélectrique et dans le stator, une action mécanique est alors appliquée sur le stator (la lame piézoélectrique joue alors le rôle d'un actionneur). Nous allons déterminer cette action mécanique exercée par la lame sur le stator. Pour obtenir une expression analytique de l'action mécanique, on utilise les résultats obtenus dans la partie 2 qui ont permis de montrer que la modélisation du stator par une couronne d'épaisseur h et de rayon moyen R (ligne neutre) était pertinente. Lame piézoélectrique Àlan de coupe pour une \ position angulaire donnée Figure 12 : Paramétrage On s'intéresse à une coupe de l'ensemble {stator+lame} pour une position angulaire donnée (cf. Figure 12). On note, pour cette position angulaire, A (y) la déformation dans le stator et dans la lame. On suppose que la déformation A (y) est linéaire en fonction de y position du point M considéré selon l'axe ?) (pour y = 0, point A, la déformation est nulle, on parle alors de ligne neutre). Entre le stator et la pastille, la déformation est continue et est notée Àj. On ne tient pas compte de l'épaisseur de la colle entre la pastille et le stator. Sur la section entière considérée (lame+stator), le torseur d'action mécanique global { T ] est nul. Ce torseur est décrit localement par un glisseur élémentaire {dTl en un point M de la section. La densité d'effort linéique de ce torseur est alors donnée par dî(y)=ag(y)dyîê dans le stator et par dî(y,t)=ap(y, t) dyî dans la lame piézoélectrique. L'étude du comportement des matériaux réalisée précédemment a permis de montrer que les densités linéiques d'efforts sont reliées àla déformation par les équations : . 0 (y) = Yâ_ A W) avec YÔ, coefficient matériau du stator V o et op(y)=Yp A(y)--oc-- avec Yp et (x coefficients matériau de la lame EUR piézoélectrique, @ l'épaisseur de la lame et V la différence de potentiel appliquée entre les faces supérieure et inférieure de la lame. Q32 : Donner les expressions de 05 (y) et (TP (y) en fonction des caractéristiques matériaux YS ,Yp, (X, et de Al-- , h, y, V, 6. On note M S le moment selon % en A dû àla densité d'effort d ]î (y) = 05 ( y) dy 55 et M p le moment selon Îâ en A dû àla densité d'effort d ]î (E!: t) = Up (y, t) dy 55. Q33 : Déterminer les expressions de MS et Mp en fonction des coefficients matériau, de AZ. ; des épaisseurs h, e et de V. Q34 : En utilisant la propriété énoncée initialement sur le torseur global d'action mécanique sur la section, en déduire une relation simple entre MS et Mp puis montrer V Y o<--(h+e) p 2 que AF 2 .A t-on continuité des contraintes oâ(y) et Ysh 2e 2 3 2 3 +Y -- @ +--h +--he 6 p3h 4 2 Üp(y) pour @; =h/2 ? Justifier. V Q35 : Montrer finalement que M S=f (6)-- avec f (6) une fonction dépendant de EUR l'épaisseur indéterminée @, des caractéristiques connues du matériau Y57 Yp ; 0< et de l'épaisseur connue de la couronne statorique h. L'expression obtenue caractérise donc le moment exercé par la lame piézoélectrique en une section donnée. Compte tenu de la largeur de la lame piézoélectrique, l'action de la lame sur toute sa longueur peut être modélisée par une densité linéique de moment définie sur la M 8 ligne neutre : ml (9) = 6 (6 --91) -- 6 (6 -- 62) avec 6 (9) la distribution de Dirac (cf. Figure R 13) et 91, 92 les angles repérant les extrémités de la lame. Cette expression n'est valable que si on suppose que la lame suit parfaitement la couronne. On fait donc l'hypothèse que l'épaisseur @ de la lame est faible devant le rayon moyen R et devant l'épaisseur de la couronne statorique h. Figure 13: Action répartie d'une lame piézoélectrîque La partie 2 a permis de montrer que le déplacement vibratoire prépondérant d'un point de la ligne neutre était essentiellement radial et donné par % R (9 , t) = A ... COS (2 9). On a également montré dans cette partie 2 que l'équation différentielle permettant de déterminer l'amplitude du mouvement de la couronne était de la forme : a A (t) + b A (t) = F (t) avec F (t) tel que P...= F (75) À ... et a , b deux constantes. Dans le cas d'un moment linéique appliqué sur la couronne, il est simple d'établir que la puissance des efforts extérieurs est donnée par : ?" duR(e,t) Pæt(t)=f ml(0,t)-------------- de. e 9=0 Ci9 On définit l'angle 90 milieu de (91 , 92) et on note 1 p la largeur de la lame dans le plan d'étude. Compte tenu des hypothèses, on ne considère que la ligne neutre et on utilise le schéma ci-dessous. Ligne eutre Figure 14: Positionnement d'une lame piézoélectrique 0=2n On rappelle que f 6 (9 ---- Ba) f (9) d 9: f (en) pour un angle Ga quelconque. 9=0 Q36 : Montrer que F ... s'écrit sous la forme F (t) = 4 Ma...... La formule précédente fait intervenir de manière découplée la position angulaire de la lame (90) , la largeur de la lame 1 p et l'épaisseur e (dans le terme M 3). On se propose maintenant d'utiliser les résultats précédents sur le stator réel, de façon à déterminer les paramètres opümaux (largeur, épaisseur, nombre, position des lames) en respectant le cahier des charges suivant pour la fonction de service : déformer le stator. Dimensions R . lp « petit » devant R= 40 mm ( l <"). " 10 h -- 6 petit devant R et h=4 mm (8 <Î6)-- Adaptation au - Peu de modification des lignes de champ de la structure qui sont à stator l'origine d'un flux magnétique caractérisant les performances de la machine (Figure 15). -- Peu de modification des valeurs des modes de vibrations fonction de la masse et de la raideur du rotor. - Excitation symétrique pour ne pas activer de mode de vibration supplémentaire. Efficacité / - Action mécanique maximale de l'acfionneur piézoélectfique Sécurité maximale en valeur absolue). - Tension d'alimentation V minimale. -- Raisonnable sachant que les lames piézoélectfiques sont onéreuses et fragiles : elles se cassent facilement si leur épaisseur est trop faible (@ < 0,1 mm) ou si le champ électrique qui les traverse est supérieur à environ 300 V/mm. Figure 15: Lignes de champ magnétique pour deux positions du rotor Q37 : Choix de la position des lames. Indiquer les angles que l'on retiendra pour positionner les lames et ceux qu'il faut absolument éviter pour placer des capteurs ou des actionneurs, compte tenu de la forme du mode de vibration à compenser (UR (9 ; t) = A (t) 008 (2 9 )) et de l'action F (É). Donner le nombre de lames à retenir pour compenser ce mode en respectant le cahier des charges. V Q38 : Choix de l'épaisseur des lames. A partir de la formule M s= f (6) -- =f (6) E EUR (où E est le champ électrique traversant une lame), expliquer comment utiliser la courbe de la Figure 16 puis la courbe de la Figure 17 de façon à choisir une épaisseur 6 en accord avec le cahier des charges. Proposer alors une valeur de 6 qui soit un bon compromis. ' CZ 13.6 1 1.6 2 2.6 3 3.6 4 [! E.5 1 1.5 2 2.5 E 3.5 4 &.5 Epaisseur 3 [mm) E"°'*"""*'""" F' 17 E 1 t' d 1 d'ff' d t t' 1 . _ . . , 1gure : vo u 10n e a 1 erence e po en 1e Figure 16. Evolut1on du moment Ms normahse en V normalisée pour un moment Ms fixé. fonction de l'épaisseur e pour un champ E donné Pour positionner les lames, deux solutions sont envisageables : création de méplat avec ajout de matière (Figure 18b ) ou création de méplat par enlèvement de matière (Figure 18a ). Il est également important de choisir la largeur de ces méplats (et donc la largeur lp des lames). Q39 : Choix de la largeur. Commenter ces deux solutions vis--à-vis du cahier des charges et indiquer celle qu'on retiendra pour mise en oeuvre sur une machine déjà existante. Expliquer enfin comment choisir la largeur de lame. a) Méplat avec enlèvement de matière b) Méplat avec ajout de matière Figure 18: Création de méplats Partie 4 : Commande du contrôle actif La partie précédente a permis de montrer comment positionner et choisir les actionneurs piézoélectriques. Les capteurs (accéléromètres) seront placés au plus près des actionneurs pour les mêmes raisons que celles invoquées pour les actionneurs. Nous allons maintenant proposer une méthode de contrôle actif des vibrations en exploitant les informations fournies par les capteurs et en commandant les actionneurs piézoélectriques. On ne souhaite contrôler que le mode de vibration prépondérant (mode 2) mis en évidence dans les parties précédentes. Toutes les étapes présentes dans le domaine physique de mesure de la démarche de modélisation (voir Figure 3), rappelées dans la Figure 19, seront traitées. Domaine Physique, de mesure Domaine de validité Figure 19: étapes du domaine physique de mesure de la démarche de modélisation. Structure de l'asservissement On retient une méthode simple et efficace : le Positive Position Feedback (PPF). Cette méthode a l'avantage d'être insensible aux approximations faites lors de la détermination de l'amortissement dans la structure à contrôler et la correction agit sur un mode sans perturber les autres modes. On place un correcteur dans la boucle de retour qui à partir de la mesure délivrée par un capteur envoie une tension de commande ajoutée àla valeur de référence VC nulle. Cette somme est utilisée comme tension de commande des actionneurs. Ainsi, si le contrôle est bien réalisé, on doit obtenir un déplacement nul de la structure et donc une tension nulle délivrée par le capteur. Le schéma--bloc suivant décrit la structure de la commande PPF. Vc=0 + V Déplacement 4> Actionneur + stator | ÿ>
+
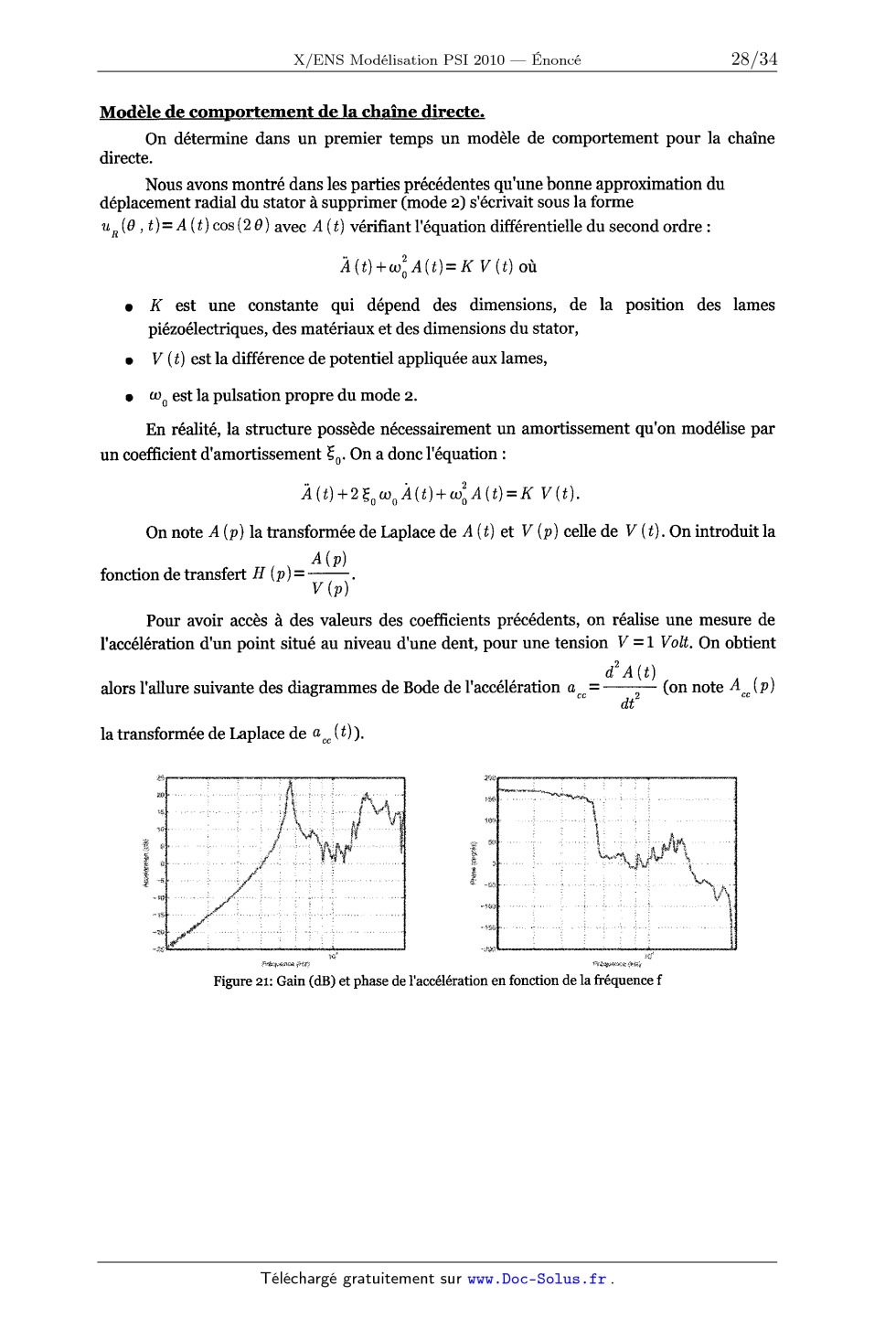
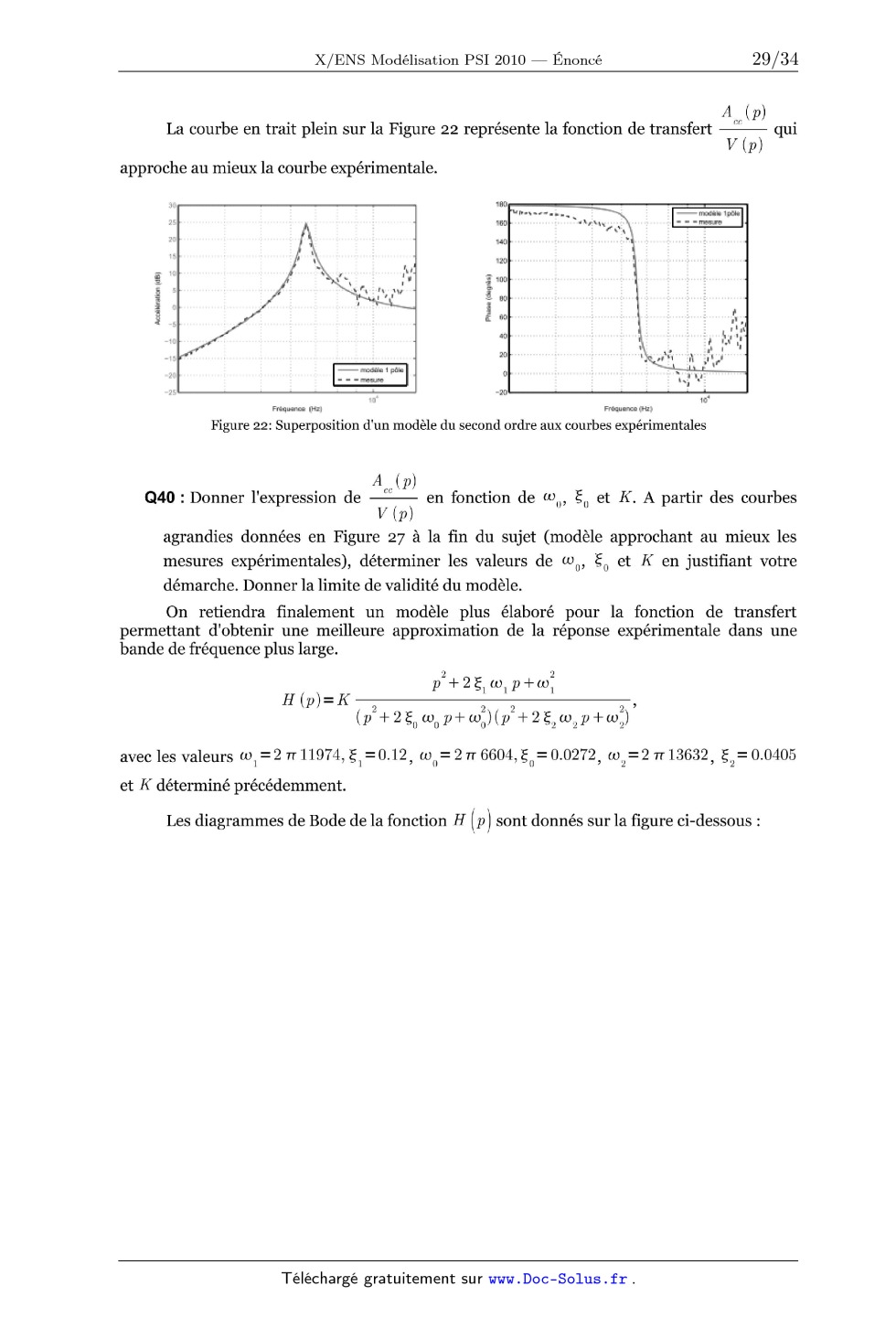
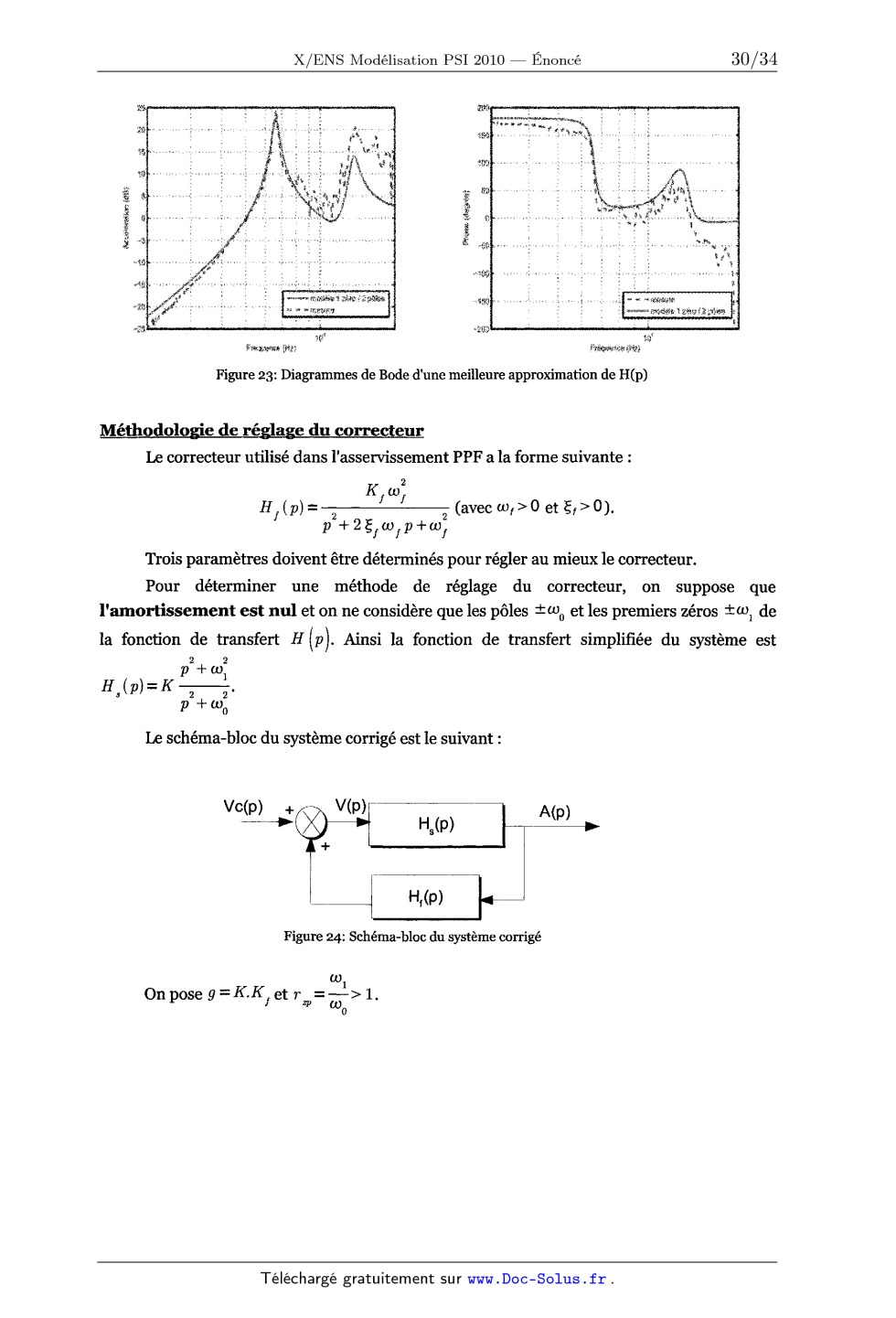
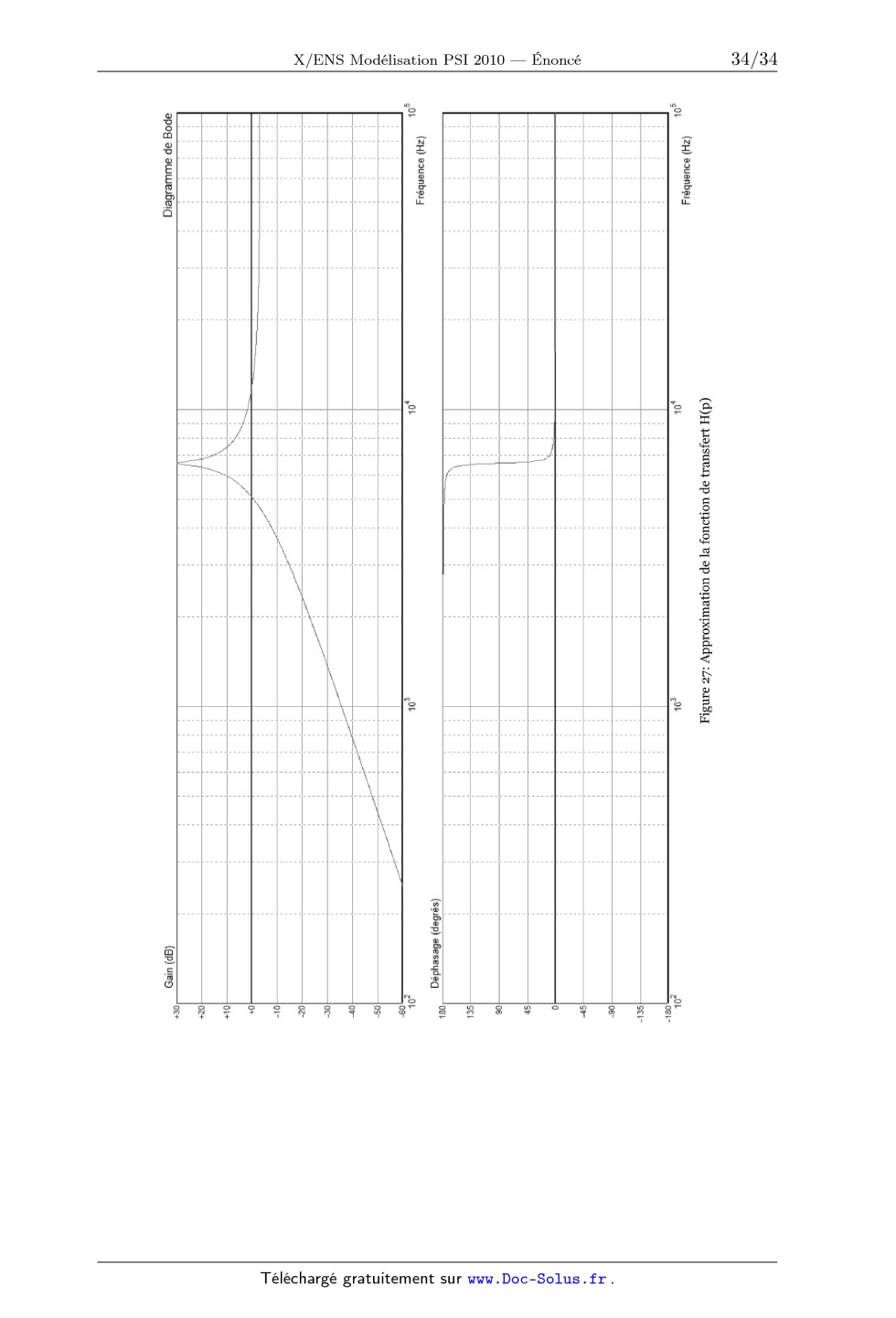
Capteur +Correcteur PPF |< Figure 20: Structure de la commande par PPF On notera qu'il s'agit d'une structure d'asservissement spécifique : cette boucle d'asservissement contient un sommateur et non un comparateur et le correcteur est positionné dans la chaîne de retour (et non dans la chaîne directe). Modèle de comportement de la chaîne directe. On détermine dans un premier temps un modèle de comportement pour la chaîne directe. Nous avons montré dans les parties précédentes qu'une bonne approximation du déplacement radial du stator à supprimer (mode 2) s'écrivait sous la forme UR (9 ; U: A (t) COS (2 9) avec A (t) vérifiant l'équation différentielle du second ordre : A(t)+wäA(t)=KV(t)où . K est une constante qui dépend des dimensions, de la position des lames piézoélectriques, des matériaux et des dimensions du stator, . V (t) est la différence de potentiel appliquée aux lames, . wo est la pulsation propre du mode 2. En réalité, la structure possède nécessairement un amortissement qu'on modélise par un coefficient d'amortissement EO. On a donc l'équation : A(t)+2ëowoÀ(t)+wâA(t)=K V(t). On note A ( p) la transformée de Laplace de A (t) et V (p) celle de V .... On introduit la . A (19) foncüon de transfert H ( p) = --. V (19) Pour avoir accès à des valeurs des coefficients précédents, on réalise une mesure de l'accélération d'un point situé au niveau d'une dent, pour une tension V = 1 Volt. On obtient d2A (t) alors l'allure suivante des diagrammes de Bode de l'accélération acc = 2 (on note Acc (P) dt la transformée de Laplace de acc ... ). tië ' ' v' ' WË'ËËWËËÜ %fiÂYÏÊÈ ï?ÿWüüfltüäü È...Ë, Figure 21: Gain (dB) et phase de l'accélération en fonction de la fréquence f A (19) CC V(p) La courbe en trait plein sur la Figure 22 représente la fonction de transfert qui approche au mieux la courbe expérimentale. "uni '-- 1;|Ïh'c U 3 Frm.}xq.ùsn F|Z'l k:ùh:...|u- |nB| & "J 23 -:e:. Freq...".'ù.< |}<1| Frame-en {Hz} Figure 22: Superposition d'un modèle du second ordre aux courbes expérimentales A (19) CC V (19) agrandies données en Figure 27 à la fin du sujet (modèle approchant au mieux les Q40 : Donner l'expression de en fonction de 000, 50 et K. A partir des courbes mesures expérimentales), déterminer les valeurs de (Do, E0 et K en justifiant votre démarche. Donner la limite de validité du modèle. On retiendra finalement un modèle plus élaboré pour la fonction de transfert permettant d'obtenir une meilleure approximation de la réponse expérimentale dans une bande de fréquence plus large. p2+2EURlwlp+wî H(P)=KY' (p +2EÛwûp+w0)(p +2E2w2p+w2) avec les valeurs w1=2 1T11974, E1=Û.12, w0=2n6604,50=0.0272, w2=2 "13632, E2=0.0405 et K déterminé précédemment. Les diagrammes de Bode de la fonction H (19) sont donnés sur la figure ci--dessous : %äË YæWMW--ït %Î"£tä3 Figure 23: Diagrammes de Bode d'une meilleure approximation de H(p) Méthodologie de réglage du correcteur Le correcteur utilisé dans l'asserfissement PPF a la forme suivante : waî Hf(p)=--2------_--------2-- (avec wf>0 et ëf>0).
p +2Efwfp+wf
Trois paramètres doivent être déterminés pour régler au mieux le correcteur.
Pour déterminer une méthode de réglage du correcteur, on suppose que
l'amortissement est nul et on ne considère que les pôles iwÛ et les premiers
zéros iw1 de
la fonction de transfert H (19). Ainsi la fonction de transfert simplifiée du
système est
2 2
p+w1
H8(P)=K--;--E-
p +w0
Le schéma--bloc du système corrigé est le suivant :
A(p)
VC(p)
Q41 : Calculer la fonction de transfert H bf = en fonction de H 8 et H }.
Q42 : En analysant le dénominateur de H bf (écrite en fonction de H 3 et H ,),
donner les
conditions de stabilité sur le gain et la phase de la fonction de transfert H 8
-- H ! (indiquer
le point critique). En précisant la définition de la marge de gain, montrer que
celle--ci est
1
égale à: M9 =20 108 2
9°?"
2?
Q43 : Montrer que H b} peut s'écrire sous la forme :
N
H "( p)= (p) (expression 1)
DU?)
avec D ( p)= p4+ C3 p3 + C'2 p2+ 01 p + CO, où l'on précisera les expressions
des
coefficients C . en fonction de K , Kf , w1 , wo , wf et Q.
1
On souhaite obtenir en boucle fermée, une réponse bien amortie avec un unique
amortissement à contrôler pour le couple pôle/ zéro de la fonction H 8. La
forme de H bf
souhaitée est donc la suivante :
NH?)
2 2
(p +25bf wa1p+wa1)(p +2 £bf wa2p+w
H:
bf 2 avec wb 2> wb 1 et Ebf < 1 (expressmn 2). f f bf2) On place les pôles (à partie imaginaire positive) de cette fonction de transfert dans le plan complexe. Axe des ima inaires Figure 25: Placement des pôles dans le plan complexe Q44 : Justifier le placement de ces pôles et montrer à l'aide de cette figure que wa2 = 0< wa1 avec (X 2 1 paramètre inconnu pour l'instant. Q45 : Déduire des deux expressions de la fonction de transfert en boucle fermée (H bf) 4 équations faisant intervenir ÿ ; sz; wa1 ; wf ; wo ; 0< ; %. et EUR]... Montrer alors que (U - ° ( 1) ' (Dm--T eq ; (X 1 _ w f . : --+l.= _ (...); bf \/& fw0 2 2 2 - wf(1--rng)=w0 (6%); 2 2 1 wf . OE+4ëbf+a=ÿ