
X/ENS Maths PSI 2003
| Thème de l'épreuve | Équations différentielles dans Mn(R) |
| Principaux outils utilisés | théorème de Cauchy-Lipschitz, crochet de Lie, décomposition de Gram-Schmidt |
| Mots clefs | exponentielle de matrice, orthonormalisation |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)


Énoncé obtenu par reconnaissance optique des caractères
MATHÉMATIQUES
DURÉE: 4 HEURES
Pour les épreuves d'admissibilité, l'usage de calculatrices électroniques de
poche a alimentatim1
autonome, non imprimantes et sans document d'accompagnement, est autorisé, une
seule a la fois
étant admise sur la table ou le poste de travail. et aucun n 'échange n'est
autorisé entre les candidats.
NOTATIONS ET DÉFINITIONS
Dans tout le problème on considère des matrices carrées n >< n à coefficients réels, et on note M,, l'ensemble de ces matrices. Si il! appartient à M... m,-j désignera son coefficient sur la ligne i et la colonne j . On définit les sous--ensembles de M,, suivants : GL,, : {M e M.,; det M # 0} o., = {M EUR M.,; "MM : 11} où ]l est la matrice identité, n'ayant que des 1 sur la diagonale et nulle ailleurs, - A,, = {.M EUR Mn; 'il/[ : ----.M}, l'ensemble des matrices antisymétriques, 'J'n : {IW : (m,-,) E M,,; m,-j : 0 si i < j}, l'ensemble des matrices triangulaires inférieures, et son sous--ensemble [J'-n = {]VÎ == (m,--j) EUR Tn;Vi, mi,: > O} .
Une application bilinéaire @ : E >< E ----+ F, où E et F sont deux espaces vectoriels, est dite alternée si, pour tout u E E, qfi(u,u) == 0. Dérivation : si 11. est une fonction dérivable d'une variable réelle t, on note ù(t0) sa dérivée en to. 0. PRÉLIMINAIRES On munit M..., de la norme suivante (qu'on ne demande pas de justifier) mER"--{O},Hællfil "OEil l:cll : \/OEÎ + - - - + 516%, est la norme euclidienne de II:. 1. Soit B une matrice de Mn. Montrer que la série où est convergente. 2. Justifier que exp(----B) est l'inverse de exp B . En déduire que exp B appartient à GL... 3. Montrer que l'application çb : R ----+ M... t l----> exp(tB) est une
fonction de classe C1 et calculer sa
dérivée.
4. Montrer que B commute avec exp(tB )
LI. ÉQUATION DE LAX
L'objectif est de résoudre certaines équations différentielles ordinaires du
premier ordre dL / dt : f (L)
où L appartient à un sous--espace vectoriel E C Mn.
1. On définit le crochet de deux matrices A, B de Mn par
[A,B] : AB ----BA .
(a) Montrer que A, B +----> [A, B] est une application bilinéaire alternée.
(b) Que peut--on dire de la trace de [A, B] '?
(0) Montrer que le crochet de deux matrices antisymétriques est une matrice
antisymétrique.
(d) Montrer que si A,B EUR 7... alors AB EUR 'Il}. et [A, B] E '.Tn.
2. (a) Soit t r----> A(t) une application de classe C'1 d'un intervalle I dans
GL... Justifier que t +----+ A"'(t)
est également de classe C'1 et donner une expression simple de sa dérivée en
fonction de la
dérivée A.
b Soit maintenant X une matrice fixée. Dériver l'a lication t +---+ A t "1X A t
et montrer que
PP
%(A"XA) : [A"'XA,A"À] .
3. On considère l'équation différentielle ordinaire suivante dans Mn (dite de
LAX) :
L = [L, M]
{ L(O) : X ...
où M = M (L) est une matrice dépendant continûment de L et X une matrice
constante fixée.
Montrer que si t +--+ L(t) est une solution de (l) sur un intervalle I, alors
Tr L(t) est constante.
4. Dans toute la suite du problème L est une solution de (1). On rappelle que
le spectre d'une matrice
M est l'ensemble de ses valeurs propres (y compris complexes). Nous nous
proposons d'étudier le
spectre de L(t) quand t varie.
(a) Soit I un intervalle et B : I ----> M... une fonction de classe C1 dont le
déterminant ne s'annule
jamais.
i. On suppose ici que B (O) = Il; calculer la dérivée en zéro de det B.
ii. Calculer la dérivée de det B dans le cas général et pour tout t.
(b) Montrer que si pour un certain to EUR I , det L(to) # 0, alors detL est
constant (non nul). Que
peut-on dire de det(L(t) ---- À]l) où A est un nombre complexe fixé ?
(c) Oonclure que le spectre de L ne varie pas avec t. On dit que la solution
est isospectmle.
5. On suppose que X possède 77. valeurs propres réelles distinctes.
(a) Montrer qu'il existe pour tout t une matrice A(t) telle que L(t) :
A(t)"'XA(t). Est-elle
unique?
(b) En admettant que l'on peut choisir t r--> A(t) de telle sorte que A soit de
classe C 1, quelle
équation différentielle A satisfait-elle (on pourra faire intervenir la matrice
M) ?
(c) Vérifier qu'une solution du système suivant dans Mn
À=AM
2
{ A An et 7r2 : Mn ----> 'J'n les projections qui à un
élément B associent les
deux termes dans la somme directe (c'est--à--dire B : 7r1 (B) + 7T2(B)).
(b) Montrer que O." et {Pn sont des sous--groupes de GL...
(c) Montrer que si M EUR A,, alors exp M EUR On. De même si M EUR 'J'... expM
EUR il)".
(d) Soit I un intervalle de R. Montrer que si R : I _---> On (respectivement T
: I ----> (Pn) est une
application de classe C' 1, alors R'"1R (resp. T"1T) est à valeur dans An
(resp. '.T,,).
2. (a) Montrer que tout élément B EUR GLn peut s'écrire comme le produit RT
d'une matrice R EUR On
par une matrice T EUR 'J'n (on pourra s'inspirer de la décomposition de
CRAM--SCHMIDT).
(b) Montrer que cette décomposition est unique. On notera respectivement 111 et
112 les appli--
cations de GLn dans Mn qui à B associent les éléments R EUR 0" et T EUR '.Pn
issus de la
décomposition de la question Il.2a.
(c) Soit 1 un intervalle et B : I ----+ Mn une application de classe C'1 telle
que Vt EUR I , B (t) EUR GL...
Pour tout t EUR I, on pose R(t) : H1(B(t)) et T(t) : H2(B(È)). Montrer que R et
T sont des
applications de classe C1 à valeur dans Mn.
3. On veut résoudre l'équation dans M :
L= L,7r1(L)
{ L(O)[=X ] (3)
(a) On cherche la solution sous la forme A(t)"'XA(t). Donner une équation
différentielle pour A
et une condition en t = 0 qui garantissent que L : t r---+ A(t)"1XA(t)
satisfait (3).
(b) Montrer que A(t) : (H1(exp(tX ))) est la solution.
III. RÉSEAU DE TODA
On considère 77. particules de masse 1 se déplaçant sur une droite, de position
q.-- et vitesse p.- pour i
entre 1 et n. Par souci de concision, on notera q le n--uple (q1, . . . , qn) ;
de même pour p.
La i--ème particule est repoussée par les particules z' ---- 1 et i + 1 et
subit une accélération ç'j.-- : p.-
----2EUR2('""q*'+1) + 262(qi--1"9i) (équation de NEWTON) ; la formule est
modifiée aux deux extrémités : Q}
151 : _282(q1--q2) et (Ïn : Ï>n : 2e2(Qn--l--qn)_
On considérera le système différentiel de 271 équations à 2n fonctions
inconnues issu des équations
ci--dessus :
Il
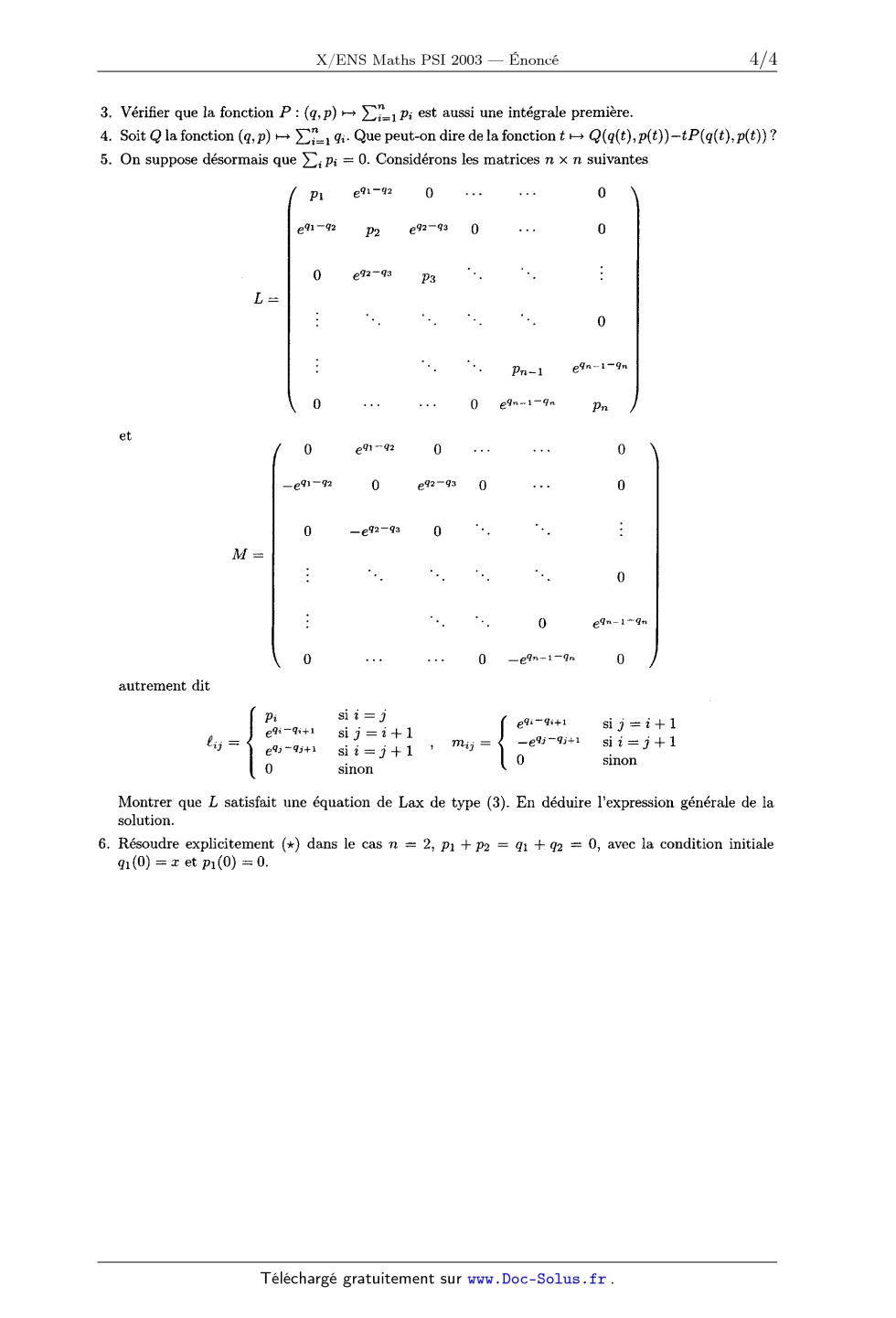
q',;=p.-- pourlîi_<_n pl : _282(Q1--42) (*) p.-- : --282(q""'"+1) + 282(q*'-1"q") pour 1 < i < n pn : 282(qn_1--qn) avec les conditions initiales q(0) : ("j, p(0) : p. 1. Vérifier que le système (*) satisfait les conditions de Cauchy--Lipschitz pour l'existence d'une solution sur un intervalle (non précisé) ] =] -- EUR, EUR[. On notera par la suite t »----> (q(t), p(t)) une telle solution.
2. On définit l'énergie mécanique du système par :
1 n n----1 ._ .
H(q,p) : î ZPÎ + z 82(Qz Qz+l) _
i=1 i=1
Vérifier que t »----> H (q(t), p(t)) est constant. On dit que la fonction H est
une intégrale première du
mouvement.
3. Vérifier que la fonction P : (q, p) s----> ZÎ=1 p,- est aussi une intégrale
première.
4. Soit Q la fonction (q, p) t--+ ZÎ=1 q,--. Que peut--on dire de la fonction t
|_) Q(q(t), p(t))--tP(q(t), p(t)) ?
5. On suppose désormais que 2, p,-- = O. Considérons les matrices n >< n suivantes pl eql--q2 () . . . . . . 0 8111 "'Q2 p2 eq2--QS O , . , 0 0 eQZ_Q3 193 L = 0 pn--1 eqn--l_qn 0 () eqn-I_Qn pn et 0 egl_q2 0 0 _te--Q2 () eqz--qs () 0 0 _eQ2--'Q3 () M = 0 () eQn--l--Qn () () _eqn--1--qn () autrement dit - si z' = ' ._ . . . . pâi_Qi+l . .:]. e'h q*+1 s1_y =z+1 EUR _ e 813 z+1 _ qa'--9j+1 ..__. 1 _ij'" eqj--Qj+l Sii=j+1 , mij-- --e sit--J+ . 0 smon 0 smon Montrer que L satisfait une équation de Lax de type (3). En déduire l'expression générale de la solution. 6. Résoudre explicitement (*) dans le cas n = 2, pl + pg = (11 +, q2 : 0, avec la condition initiale q1(0) = 93 et p1(0) == 0-