
Centrale Physique 1 PC 2004
| Thème de l'épreuve | Étude du phénomène des marées |
| Principaux outils utilisés | mécanique du point, ondes de gravité, mécanique des fluides |
| Mots clefs | marée |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)
Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
on. Ë... _ _ ...:Qoe>=a ëä...
ËQN omäQ:OE .. ÆOEÈOEO mËoËoü
Ce problème se propose d'aborder difiérents aspects du phénomène des marées
océaniques.
Les quatre parties qui le composent sont largement indépendantes.
, -- "" _") --> "__--> . --> ->
On rappelle la formule (1 analyse vector1elle : rot(rot( v)) : grad(dw(v)) -- Av
Partie I - Théorie statique des marées
Données relatives àla Terre (de centre T ), àla Lune (de centre L ) et au Soleil
(de centre S) :
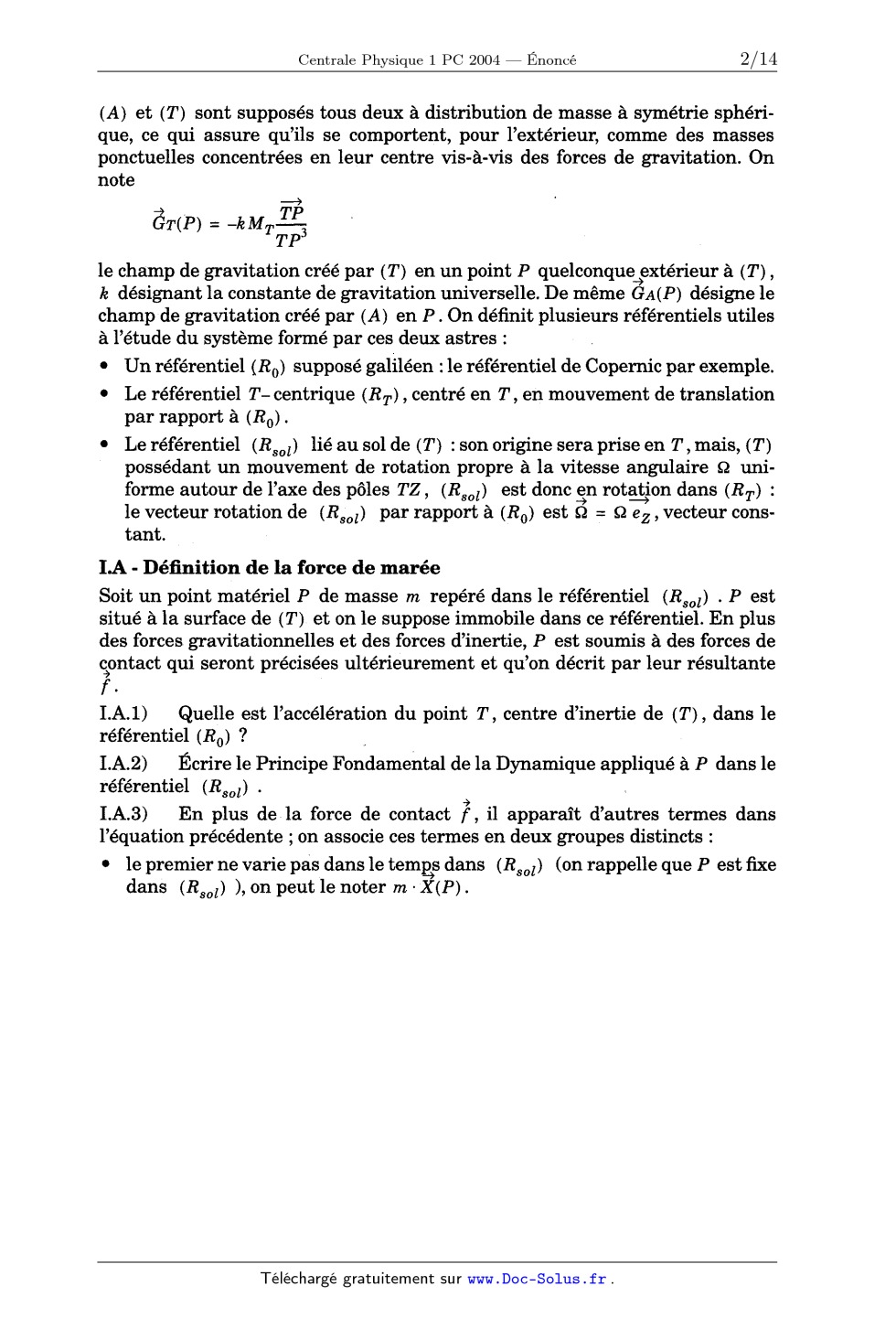
Constante de la gravitation universelle : k = 6, 7 >< 10--11N-m2 -kg"2 ; Intensité de la pesanteur àla surface de _2 ' -- g = 9, 8 m - s ; la Terre : Masse de la Terre : MT : 6,0 x 1024kg ; Masse de la Lune : ' ML : 7, 4 x 1022 kg « MT/8l ; Masse du Soleil: Ms : 2,0x1030kg--3,3x105°MT ; ' Rayon terrestre moyen : RT : 6, 4 >< 106 m ; Rayon moyen de lorb1te de la Lune TL : 3, 8 x 108 m ; autour de la Terre : Rayon moyen de l'orbite de la Terre 11 _ autour du Soleil: TS " 1:5"10- ... , Période de rotation propre de la Terre - - ' = 6164 = ' ; (Jour31deral); TT 8 8 23h 56m... 45 On considère un système supposé isolé de deux astres en interaction gravitationnelle : 0 Une planète (T) de masse M T , de centre T et de rayon RT :il s'agira en fait de la Terre. 0 Un astre attracteur (A) de masse M A , de centre A : en pratique, ce sera la Lune ou le Soleil. (A) et (T) sont supposés tous deux à distribution de masse à symétrie sphéri- que, ce qui assure qu'ils se comportent, pour l'extérieur, comme des masses ponctuelles concentrées en leur centre vis-à-vis des forces de gravitation. On note TP TP3 le champ de gravitation créé par (T) en un point P quelconque extérieur' a (T), k désignant la constante de gravitation universelle. De même GA(P) désigne le champ de gravitation créé par (A) en P. On définit plusieurs référentiels utiles à l'étude du système formé par ces deux astres : ôcr(P)--- : --kMT----- 0 Un référentiel (RO) supposé galiléen :le référentiel de Copernic par exemple. 0 Le référentiel T--- centrique (RT) , centré en T, en mouvement de translation par rapport à (RO) . ° Le référentiel (R...) lié au sol de (T) : son origine sera prise en T , mais, (T) ' possédant un mouvement de rotation propre à la vitesse angulaire Q uni- forme autour de l'axe des pôles TZ, (R...) est donc en rotation dans (RT): le vecteur rotation de (R...) par rapport a (Ro) est 9: Q_) eZ , vecteur cons-- tant. I.A - Définition de la force de marée Soit un point matériel P de masse m repéré dans le référentiel (R...) . P est situé àla surface de (T) et on le suppose immobile dans ce référentiel. En plus des forces gravitationnelles et des forces d'inertie, P est soumis à des forces de qontact qui seront précisées ultérieurement et qu'on décrit par leur résultante f . LA. 1) Quelle est l'accélération du point T , centre d'inertie de (T) , dans le référentiel (RO) ? I.A.2) Écrire le Principe Fondamental de la Dynamique appliqué' a P dans le référentiel (R...). I.A.3) En plus de la force de contact ; , il apparaît d'autres termes dans l'équation précédente; on associe ces termes en deux groupes distincts : ° le premier ne varie pas dans le temps dans (R...) (on rappelle que P est fixe dans (R...) ), on peut le noter m X (P) ° le deuxième varie dans le temps à cause du mouvement apparent de (A) dans (R...): on le note m CAT(P) et on le nomme « force de marée de l'astre (A) en P ». Proposer une notation plus usitée pour le champ X (P) , de quel champ bien connu s 'agit-- --il ? Vérifier que CAT(P): GA(P)-- GA(T). I.B - Calcul de la force de marée Soit (9%) le plan constant . z* dans lequel se déplacent A et Figure 1 T. Pour calculer CAT(P) à une date donnée, on munit (voir la figure 1) l'espace d'un repère (T) instantané (Txyz) tel que, àla date considérée : ---9 o o 0 TA est d1r1gé selon (Tx) : --> ---->
TA = TA - ex. _
° (Ty) est contenu dans le
plan 493 A) -- (A)
0 (Tz) est normal à ce plan: (@
comme (9%) ne comc1de x}/
pas forcément avec le plan (Les proportions ne sont pas respectées)
équatorial de (T) , on
remarque que (Tz) : (TZ) a priori.
Dans ce repère, les coordonnées de P sont (x, y, z).
Soit un point P de la surface de (T) , tel que TP : RT« TA , et donc lx] « TA ,
|yl « TA et lzl « TA ,un calcul élémentaire non demandé montre que le dévelop--
pement limité' a l'ordre 1 en x/ (TA) , y/ (TA) z/ (TA) conduit a l'expression
sim-
plifiée de CAT(P) dans la basee "' x,_;,"; liée au repère (Txyz):
_2_x
TA
kMA y
TA2 TÂ
_Ë_
TA
On gardera cette expression simplifiée dans toute la suite du problème.
_,
CAT(P) : --
I. B. 1) En prenant les valeurs numériques relativîs à la 'jierre et' la Lune,
évaluer l'ordre de grandeur du maximum du rapport |CAT(P / "Ga/"(P). àla sur--
face de (T).
I.B.2) Représenter sur un schéma clair ce champ OAT(P) aux quatre points
suivants de (9%) : P1(RT,O,O) ; P2(O,RT,O) ; P3(--RT,O,O) ; P4(O,--RT,O) .
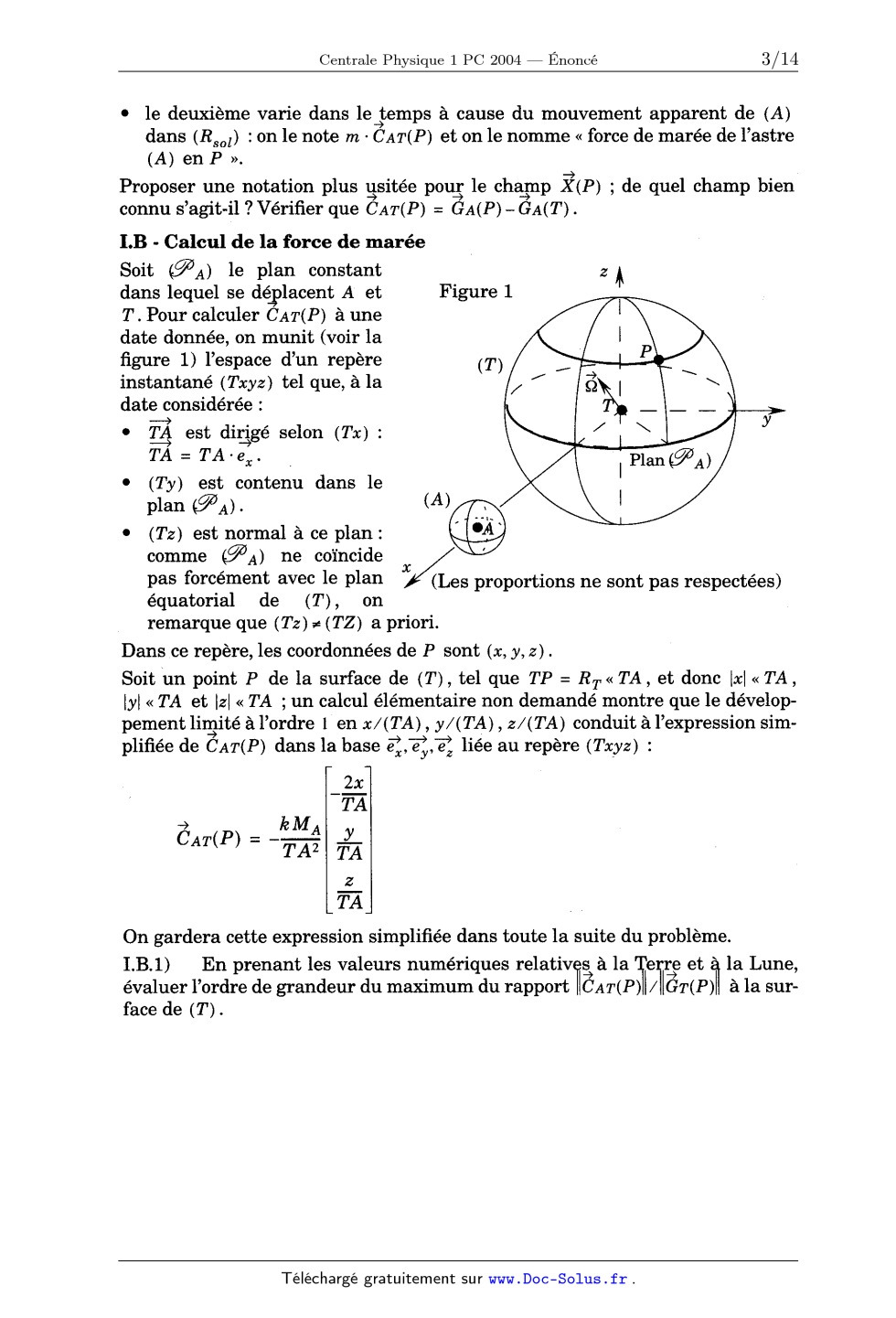
I.B.3) Montrer qu'il
existe un « potentiel »
XAT(P) tel que .
CAT(P) : --gradP(VAT) .
Exprimer ce potentiel
VAT(P) en fonction de k,
MA,x,y,z etTA.
I.B.4) On note ZA(P) l'angle (TP--,TA) == (TP,PA) :c'est l'angle zénithal de (A)
en P. Montrer alors que, pour P àla surface de (T) :
Râ
2TA
, Figure 2
P ZA(P)
(T)
Vue en coupe dans le plan( TAP)
3(1--3coszzA(P)) ' (1)
LG - Modèle statique de la marée océanique
On prend dans cette question pour (T) et (A) les valeurs numériques correspon-
dant respectivement àla Terre et àla Lune ou àla Terre et au Soleil.
On suppose ici que la planète (T) est complètement recouverte d'un océan
liquide. L' eau est un liquide incompressible de masse volumique M . On suppose
que le champ de pesanteur ;? est radial et que son module g est uniforme
sur toute l'étendue de l'océan. La pression atmosphérique Po est supposée uni-
forme sur toute sa surface. Si (T) était isolée dans l'espace, la surface libre
de
l'océan serait alors parfaitement sphérique. Mais l'existence de la force de
marée créée par (A) va déformer cette surface. On suppose dans cette question
que cet océan est constamment en équilibre mécanique sous l'effet du champ de
marée CAT(P) et du champ de pesanteur g.
I. C. 1) Justifier que, dans le cadre de cette hypothèse d'équilibre mécanique,
la surface libre de l'océan est une équipotentielle du champ résultant de CAT(P)
et de g.
I.C.2) P étant un point de la surface libre du liquide pour lequel l'angle zéni-
thal de (A) vaut ÈA(P) , on n'a plus exactement TP : RT mais TP : RT+ë(P) ,
&(P) représentant la surélévation océanique algébrique en P due aux effets de
marée de (A) , avec évidemment lë(P)l « RT. Déterminer alors la valeur de E(P)
à'une constante près (qu'il est inutile de chercher à calculer) et donner son
expression en fonction de g , k , M A , RT , TA et ÈA(P) . On note
respectivement
&max et an,... les valeurs maximale et minimale de E(P) , ÈA(P) pouvant varier
de 0 à 180° . Donner la valeur numérique de l'amplitude maximum
AE_L : ëmax -- Emin due à l'influence de la Lune prévue par ce modèle. Combien
de
marées hautes peut-on prévoir par jour ? Calculer de la même façon la valeur
numérique de l'amplitude maximum AES due à l'influence du Soleil. .
1.0.3) On admet que les effets de marée dus à la Lune et au Soleil se super--
posent simplement, si bien qu'on peut additionner les deux surélévations &
introduites précédemment. Il arrive, de façon assez exceptionnelle d'ailleurs,
que le Soleil et la Lune se trouvent tous deux dans le plan équatorial de la
Terre.
On le Supposera dans cette question et on considérera que pendant une journée,
les positions relatives de T, L et S ne changent pratiquement pas. On considère
un point P situé sur l'équateur. On appelle marnage la différence de niveau
d'eau entre une pleine mer (ou marée haute) et une basse mer consécutives, au
même point P. '
En raisonnant sur des schémas clairs, expliquer pourquoi il existe en P des
marées de vives-eaux (c'est-à-dire de mamage important) et des marées de mor--
tes-eaux, de faible marnage. Déduire des résultats précédents la valeur du mar--
nage de vives-eaux A&VE et du mamage de mortes-eaux A&ME . Ces valeurs sont
nettement inférieures à ce qu'on peut observer sur les côtes de l'Atlantique et
de
la Manche, on verra pourquoi ultérieurement.
À propos de cette question, vers quelles dates de l'année leSoleil se
trouve--t-il
dans le plan de l'équateur ?
En raison de la complexité du mouvement de la Lune et du Soleil par rapport à
la Terre, il apparaît différentes périodes dans les marées, dont les plus
signifi-
catives sont 17'L : 12, 4 h et 17'S : 12 h.
Le modèle statique développé dans cette partie ' n'est pas satisfaisant dans la
réalité : il ne permet de prédire avec précision ni les amplitudes des marées,
ni
leurs horaires, en particulier au voisinage ,des côtes. En efi'et, les forces
de marées,
qui agissent dans tout le volume des océans, mettent ceux-ci en mouvement. La
surélévation océanique qui en résulte, ë(P, t) , est mieux décrite par une onde
de
marée qui se propage dans chaque océan. Cette onde est d'ailleurs à multiples
périodes. La géographie des continents et des fonds sous-marins rend le problème
global (c'est-à-dire qu'il s'agit de prévoir par le calcul la surélévation
océanique
'&(P, t) en tout point et à tout instant) d'une complexité extrême, à tel point
que sa
résolution numérique n'en est qu'à ses débuts. Il est en revanche plus aisé de
pré-
voir les caractéristiques des marées dans une mer semi--fermée (comme la Manche
ou la Mer du Nord) de faible volume par rapport à celui de l'océan. Pour cela,
on
suppose que la mer considérée ne fait que réagir à l'excitation provoquée par la
marée océanique sur son côté ouvert, et on néglige purement et simplement les
for--
ces de marées qui agissent en son sein.
Dans toute la suite du problème, on ne s'intéressera plus qu'à la propa-
gation des ondes de marées dans des mers de faibles dimensions et on ne
tiendra plus compte des forces de marées qui s'exercent dans cette mer.
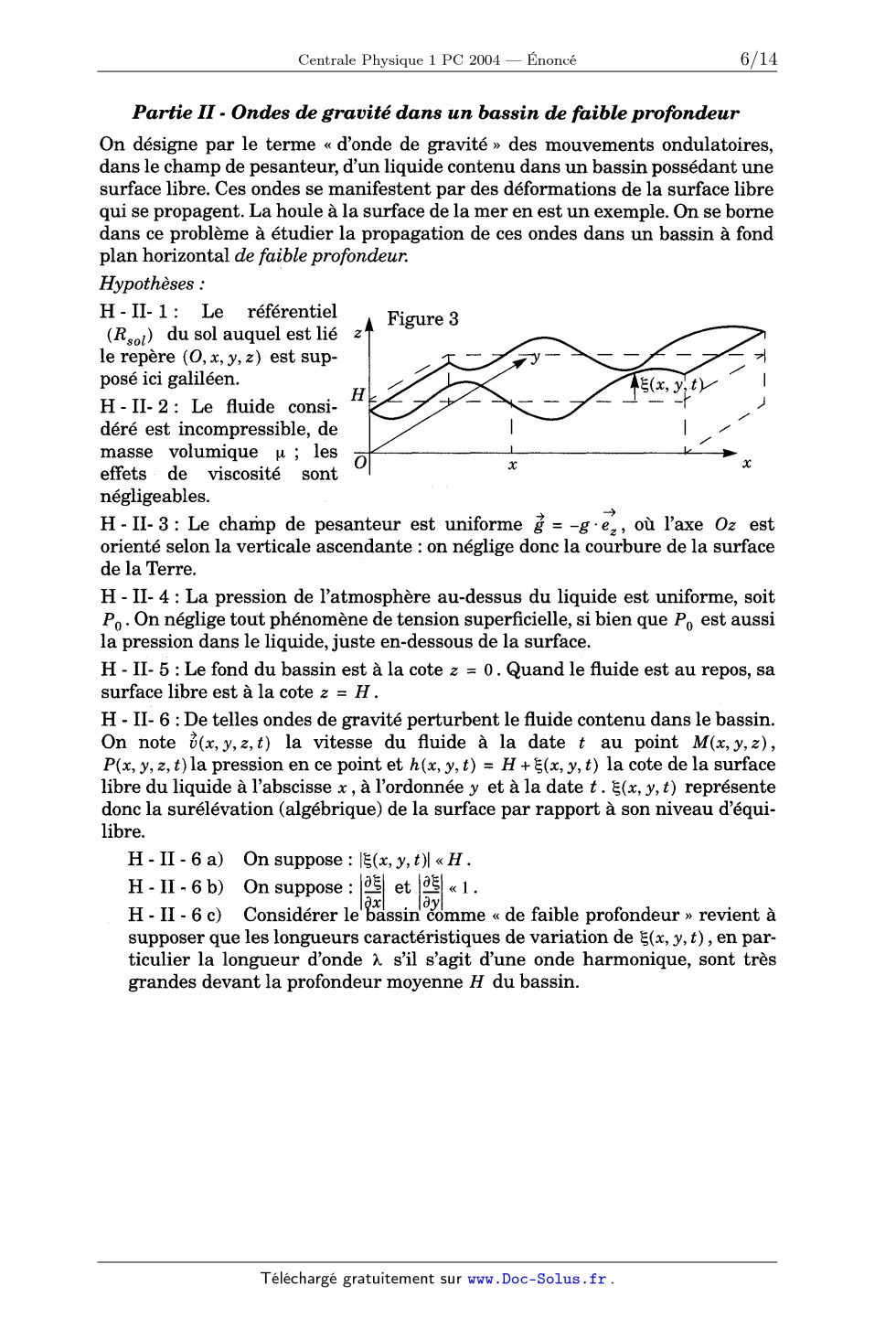
Partie II - Ondes de gravité dans un bassin de faible profondeur
On désigne par le terme « d'onde de gravité >> des mouvements ondulatoires,
dans le champ de pesanteur, d'un liquide contenu dans un bassin possédant une
surface libre. Ces ondes se manifestent par des déformations de la surface libre
qui se propagent. La houle à la surface de la mer en est un exemple. On se borne
dans ce problème à étudier la propagation de ces ondes dans un bassin à fond
plan horizontal de faible profondeur.
Hypothèses :
H - II-- 1 : Le référentiel
(R...) du sol auquel est lié
le repère (0, x, y, z) est sup--
posé ici galiléen.
H - II- 2: Le fluide consi--
déré est incompressible, de
masse volumique u ; les
effets de viscosité sont
négligeables.
Figure 3
H -- II- 8: Le champ de pesanteur est uniforme .? : --g-Î
orienté selon la verticale ascendante : on néglige donc la courbure de la
surface
de la Terre.
,, où l'axe Oz est
H - II- 4 : La pression de l'atmosphère au-dessus du liquide est uniforme, soit
P0 . On néglige tout phénomène de tension superficielle, si bien que P0 est
aussi
la pression dans le liquide, juste en-dessous de la surface.
H -- II- 5 : Le fond du bassin est à la cote z = 0 . Quand le fluide est au
repos, sa
surface libre est àla cote z = H .
H - II-- 6 : De telles ondes de gravité perturbent le fluide contenu dans le
bassin.
On note Ë(x, y, z, t) la vitesse du fluide à la date t au point M (x, y, z) ,
P(x, y, z, t) la pression en ce point et h(x, y, t) = H + %(x, y, t) la cote de
la surface
libre du liquide à l'abscisse x , à l'ordonnée y et àla date t. &(x, y, t)
représente
donc la surélévation (algébrique) de la surface par rapport à son niveau d'équi-
libre.
H - II - 6 a) On suppose : l'ê(x, y, t)| « H.
H-II--6b) On suppose: ÊË et.lÊË
x .
6
H - Il - 6 c) Considérer le ass1n ä)mme « de faible profondeur » revient à
supposer que les longueurs caractéristiques de variation de E(x, y, t) , en
par-- _
ticulier la longueur d'onde A s'il s'agit d'une onde harmonique, sont très
grandes devant la profondeur moyenne H du bassin.
«1.
H- H- 6 d) On suppose l'écoulement du fluide essentiellement horizontal,
et on considère donc comme nulle la composante verticale u (x, y, z, t) de
v(x,y,z, t), dès lors v(x, y,z, t) = u (x, y,z t) ex+vy (x, y,z, t) ey.
H- H- 7 . Les ondes de gravité que l'on considère 1ci étant de faible amplitude,
les perturbations 3 et & engendrées par le passage des ondes sont faibles : on
pourra assimiler ces grandeurs à des infiniment petits.
H - II- 8 : On suppose l'écoulement irrotationnel.
II.A - Équations constitutives
II.A.1) D'après l'hypothèse H - Il - 8, montrer que ni vx(x, y, z, t) , ni
vy(x, y, z, t) ne dépendent de la coordonnée z .
II.A.2) En effectuant un bilan de matière sur une colonne d'océan d'axe verti--
cal, de section droite rectangulaire dx - dy infinitésimale s'étendant depuis le
fond jusqu'à la surface libre, montrer la relation :
div[(H+ g)v]+-â- "Î= _ (2)
II.A.3) Les hypothèses posées font que l'on a div(5)æ0. En quoi est-ce
paradoxal ? Quelle est l'hypothèse faite qui conduit à ce paradoxe ?
II.A.4) Écrire l'équation d'Euler qu'on repérera par la référence (3).
En déduire l'expression deP(x, y, z, t) en fonction de Po , g , u , H , E(x, y,
t) et z.
Pourquoi qualifie-t-on d'« hydrostatique >> ce champ de pression ?
II.B - Équations de la propagation
Dans le cadre de l'hypothèse H - II- 7, il est légitime de linéariser les
équations
aux dérivées partielles en 5 et & (équations (2) et (B)) en se limitant au
premier
ordre en 3 et &.
II.B.1) Dans quel domaine de la physique avez-vous rencontré ce genre de
raisonnement '? --
II.B.2) Linéariser l'équation (2). On obtient l'équation linéarisée (4).
II.B.3) Linéariser l'équation (3) en tenant compte de l'expression obtenue
pour P(x, y, z, t) . On obtient l'équation linéarisée (5).
II.B.4) En déduire deux équations aux dérivées partielles, vérifiées l'une par
E(x, y, t) et l'autre par 3(x, y, t) : quel nom donne--t-on à ce type
d'équations ? En
déduire, dans le cadre des hypothèses, la vitesse de propagation c de telles
ondes de gravité dans ce bassin. On exprimera c en fonction des constantes
nécessaires parmi g, u et H . Vérifier l'homogénéité du résultat.
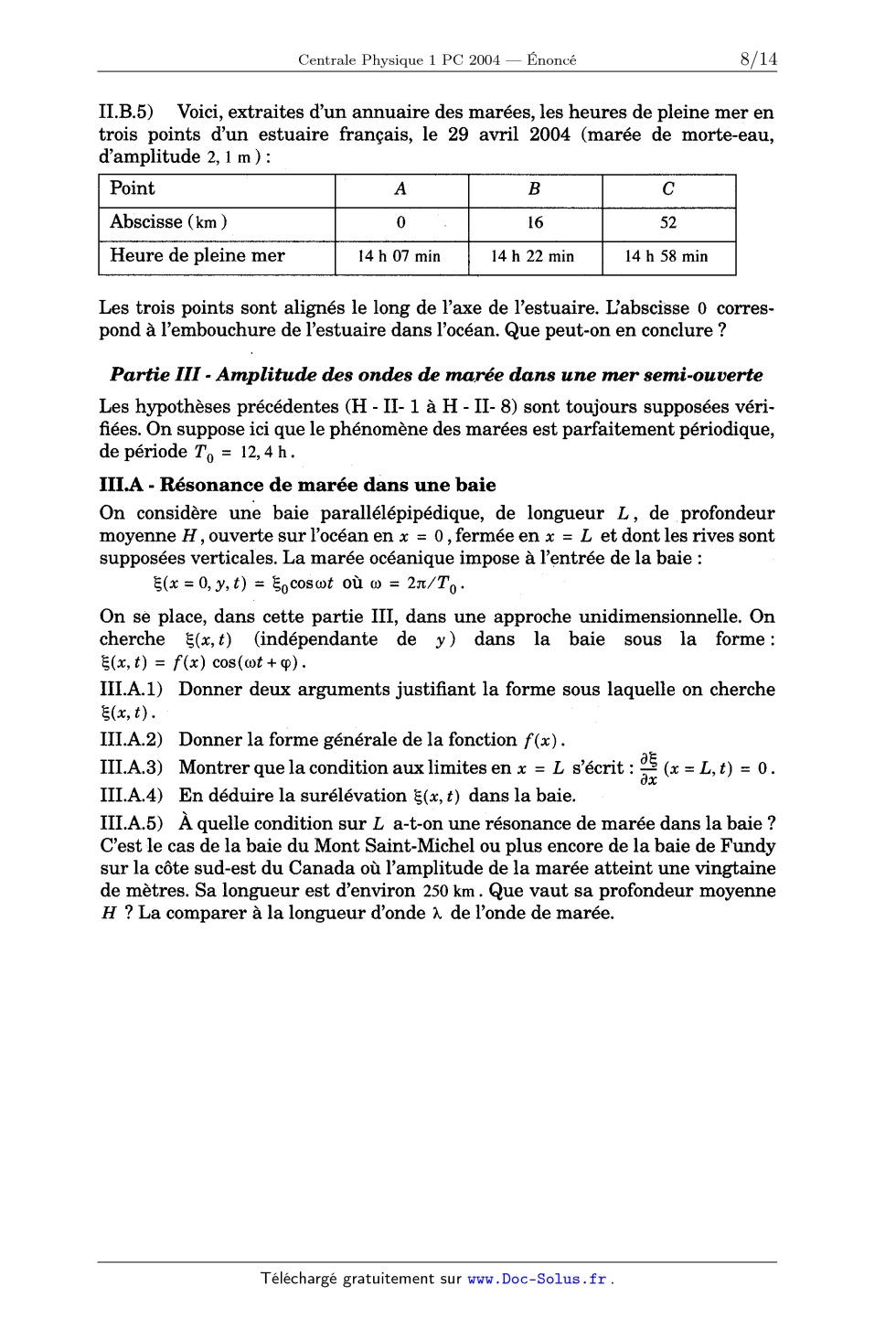
II.B.5) Voici, extraites d'un annuaire des marées, les heures de pleine mer en
trois points d'un estuaire français, le 29 avril 2004 (marée de morte-eau,
d'amplitude 2, 1 m) : '
Point
C
Heure de pleine mer 14 h 07 min 14 h 22 min 14 h 58 min
Les trois points sont alignés le long de l'axe de l'estuaire. L'abseiSse ()
corres-
pond à l'embouchure de l'estuaire dans l'océan. Que peut-on en conclure ?
Partie III - Amplitude des ondes de marée dans une mer semi--ouverte
Les hypothèses précédentes (H - II- 1 à H - II- 8) sont toujours supposées véri-
fiées. On suppose ici que le phénomène des marées est parfaitement périodique,
de période To : 12, 4 h.
HLA - Résonance de marée dans une baie
On considère une baie parallélépipédique, de longueur L , de profondeur
moyenne H , ouverte sur l'océan en x = 0 , fermée en x = L et dont les rives
sont
supposées verticales. La marée océanique impose à l'entrée de la baie :
ë(x : 0, y, t) : &0cosoet où (» : 2n/TO.
On se place, dans cette partie III, dans une approche unidimensionnelle. On
cherche ë(x, t) (indépendante de y) dans la baie sous la forme :
&(x,t) = f(x) COS(oet+cp)-
III.A.1) Donner deux arguments justifiant la forme sous laquelle on cherche
&(x, t)-
III.A.2) Donner la forme générale de la fonction f(x).
III.A.8) Montrer que la condition aux limites en x = L s'écrit : % (x = L, t) =
0 .
III.A.4) En déduire la surélévation &(x, t) dans la baie.
III.A.5) À quelle condition sur L a--t-on une résonance de marée dans la baie ?
C'est le cas de la baie du Mont Saint-Michel ou plus encore de la baie de Fundy
sur la côte sud-est du Canada où l'amplitude de la marée atteint une vingtaine
de mètres. Sa longueur est d'environ 250 km . Que vaut sa profondeur moyenne
H ? La comparer à la longueur d'onde ?» de l'onde de marée.
III.B - Amplitude de la marée dans une mer fermée
On considère maintenant une mer parallélépipédique fermée, de longueur L , de
profondeur moyenne H . On cherche encore la surélévation de la surface libre
sous la forme &(x, t) : g(x) cos(oet) .
III.B.1) Déterminer complètement È,(x, t) à une constante multiplicative près.
À quelle condition sur L une telle onde de marée peut--elle s'établir avec une
amplitude notable dans cette mer ?
III.B.2) Le bassin occidental de la Méditerranée a une longueur L = 1500 km et
une profondeur moyenne" H = 2000 m . Interpréter la quaSi-absence de marée en
Méditerranée. Peut--on encore considérer que l'on est en eau peu profonde ?
Partie IV-- Influence de la rotation de la Tbrre sur les marées océaniques
. dans un bassin limité
Le bassin considéré est assimilable à un canal d'aXe Ox , de profondeur H uni--
forme et de largeur 2b uniforme selon Oy. Ce bassin est en contact en x = 0
avec un océan qui excite ainsi, dans le bassin, une onde" de gravité qu'on
suppo-
sera parfaitement harmonique, de période T() = 12, 4 h. On continue à négliger
la force de marée qui s'exerce sur l'eau du bassin mais on cherche à prendre en
compte l'influence de la force de Coriolis. Pour simplifier, on suppose toujours
petites les dimensions du bassin par rapport au ray0n de la Terre, si bien qu
'on
suppose que la latitude A est uniforme dans le bassin. Supposons que le bassin
eSt contenu dans l'hémisphère Nord, que l'axe Ox est orienté vers l'est et l'axe
Oy eSt orienté vers le nord. Dans ce repère le vecteur rotation propre de la
Terre
a donc pour coordonnées
"' 2a
SZ= (SZ cost/Î)01'1SZ=1Ç=7,3x105--rads1
T
SZ sm
WA ? Mise en équation des Ondes de gravité tenant compte de la
composante horizontale de la force de Coriolis
On conserve les hypothèses H -' II- 2 à H -- II- 7 de la partie Il auxquelles on
ajoute les hypothèses supplémentaires suivantes: '
H- IV- 1: Tous les points du baSsin considéré sont Supposés à la même lati-
tude A. " *
H IV- 2: On négligé les forces de marée, la composante verticale de la force '
de Coriolis, mais on tient compte en revanche des composantes horizontales de
cette dernière. '
IV.A.1) En un point M (x, y, z) du bassin où le champ des vitesses est :
...;
_) -->
v(x, y, t) = vx(x, y, t) 'e, + vy(x,y, t) ' e, ,
déterminer la force de Coriolis s'exerÇant sur une particule fluide de volume
cl V .
Dans la suite, on ne tiendra pas compte de sa composante verticale (hypothèse
H - IV-- 2"). Montrer que la composante horizontale de la force de Coriolis est
per--
pendiculaireà 3(x, y, t) : dans ces conditions, la direction de l'axe Ox du
canal
a--t--elle une importance quelconque dans la suite. '7 '
IV.A. 2) En déduire la nouvelle expression de l'équation d'Euler, et la
linéariser: on obtient la n0uvelle équation linéarisée (6).
Montrer que l'expression de P(x, y, z, t) en fonction de Po , g , M , H ,
'ç',(x, y, t) et
zétablie à la question II ..A 4 n 'est pas modifiée.
IV.A. 3) Compte tenu des hypothèses faites, on cherche une onde de marée de
la forme:
Ë(x y, t) f(x, y)exp(ioet) en notation complexe, avec (» = 2--'5
To
On suppose que leehamp de vitesses qui lui est associé est de la foMe :
l_)_,_,(x. y)exp(ioet) '
ê(x,y.z,t) = vy(x,y)eXp(iwt)-
()
Trouver deux équations linéaires liant v x(x, y) v (x, y) et les dérivées
partielles
de f (x, y). On posera: y- : 2£2sinA. On Jt:admettra, sans chercher à le
montrer,
que ces deux équations, une fois réarrangées, donnent:
af af--
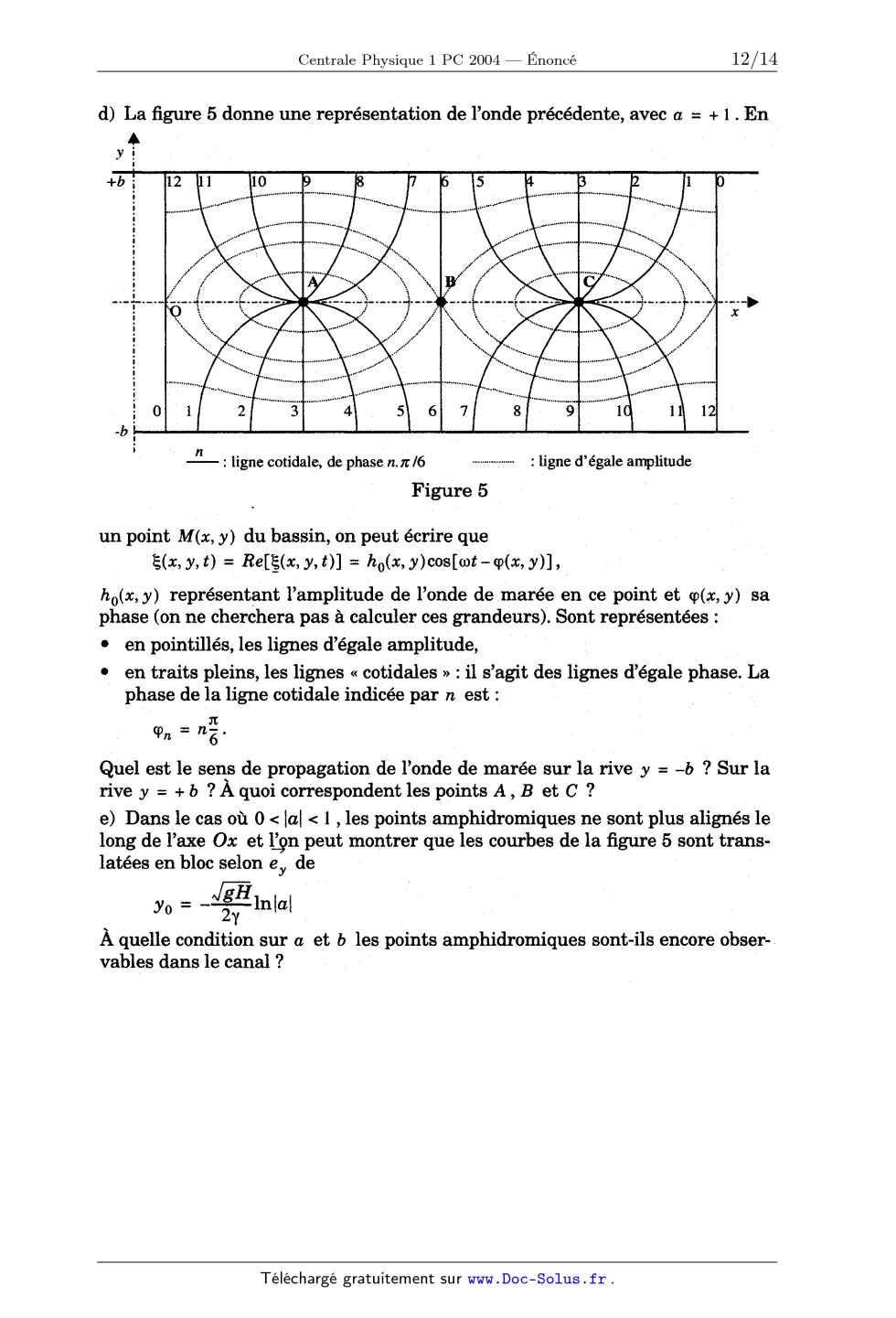
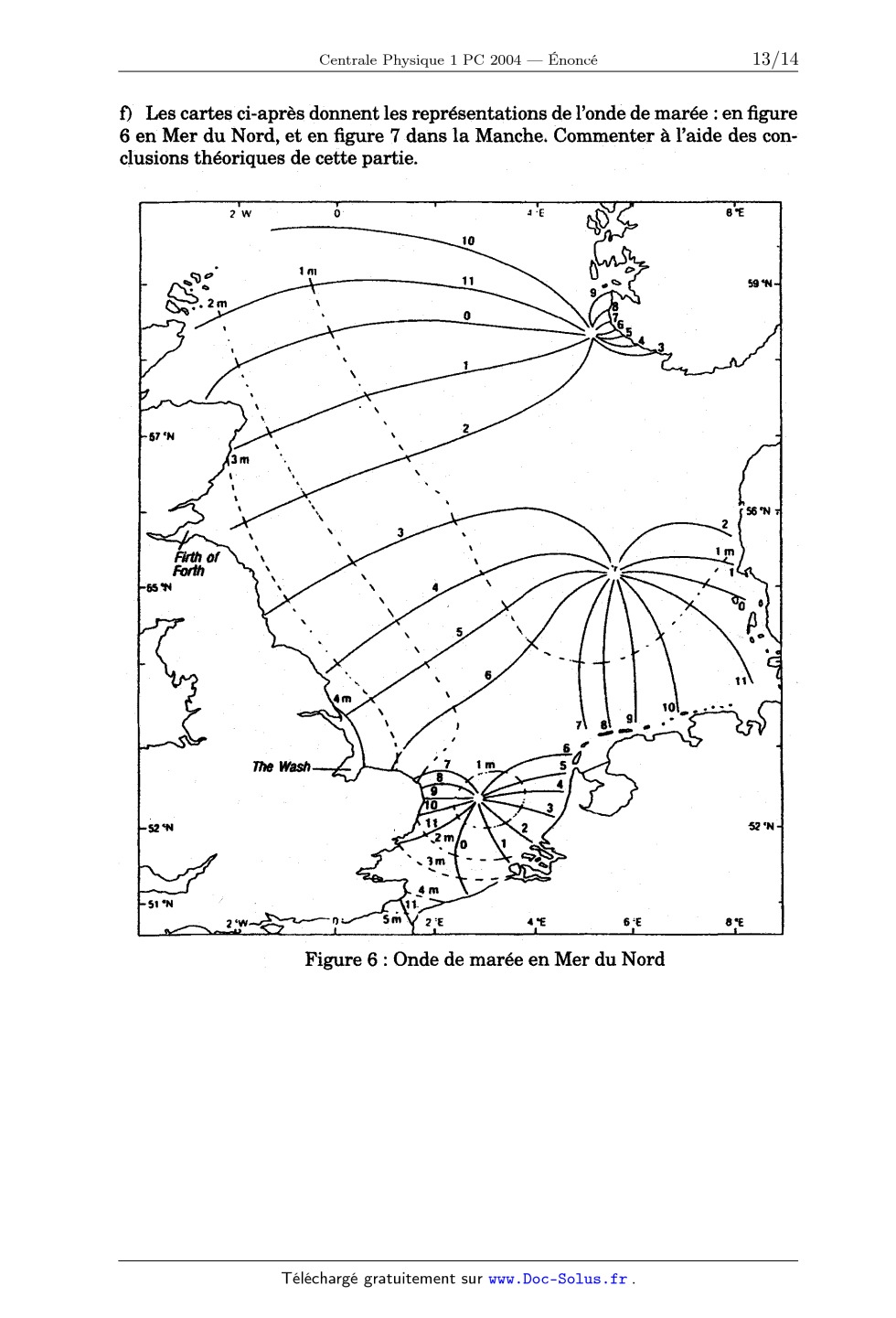
g . _ _
U x, =-- zoo--+ --
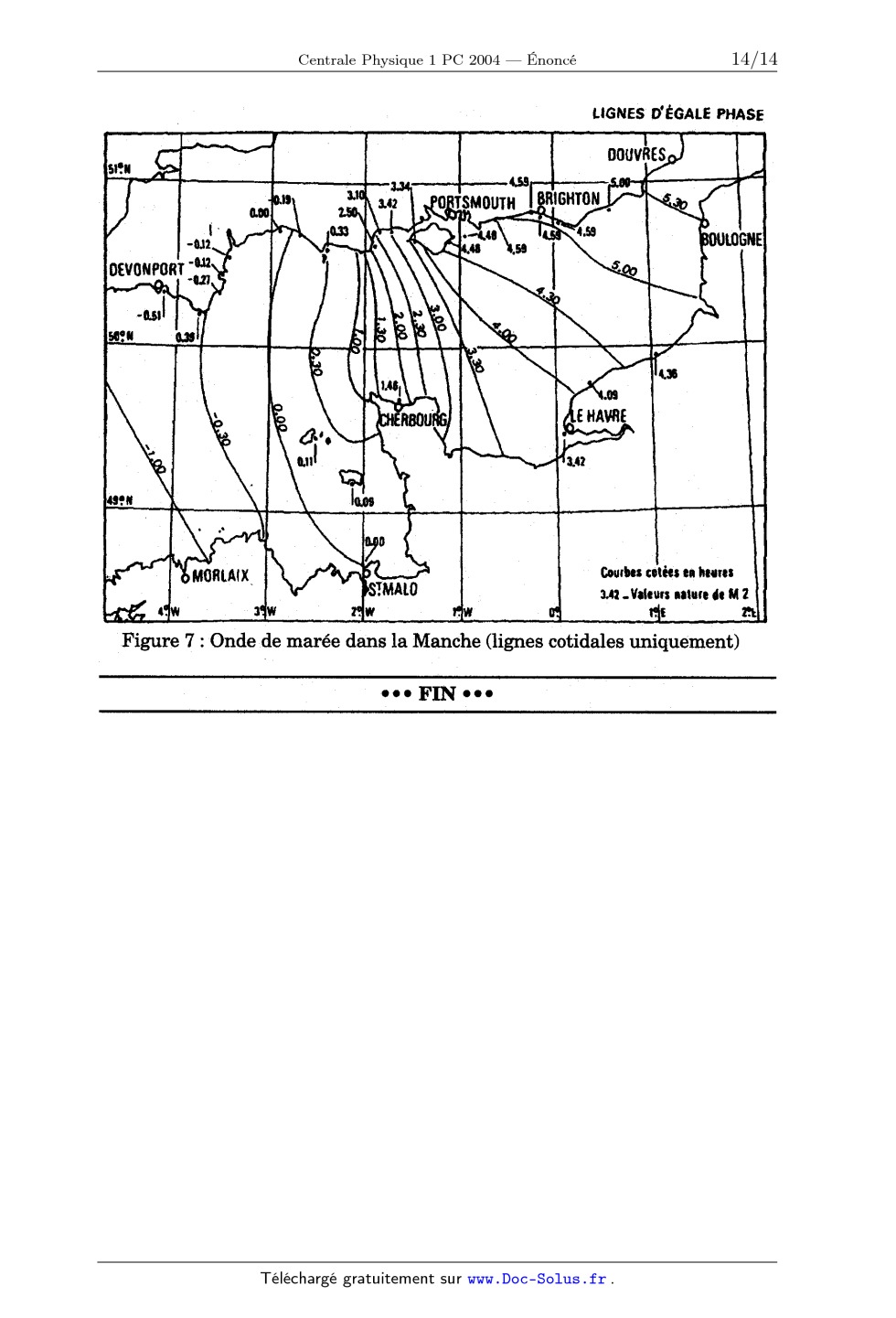
_î'( y) Y2--oe2< ôx Yôy) . af 'af ' EUR u x, =--- (x)---- __3_'( y) yz--oe2i( ôyYô x) WA. 4) Doit-on modifier l'équation (4) obtenue àla question II. B. 2? Montrer que la fonction f (x, y) vérifie la relation. (02 2 "Y _ Af+oe gH _}_"-O. Commenter. IV.B - La solution particulière des ondes de Kelvin ' On conSidère une onde de marée se pro-- pageant dans un canal infini d'axe Ox , de profondeur H et de largeur 2b toutes deux constantes. Figure 4 y IV.B.1) Donner, en la justifiant, la con--' dition que doivent vérifier les dérivées partielles de [ (x, y) sur les deux bords latéraux du canal. IV.B.2) a) Montrer que l'onde de marée suivante : ë(x, y,t) : ëoexp(--JËÊ) exp{ioe(t----Ë)Ïl convient. Elle est dite « onde de Kelvin ». b) À quoi correspond physiquement une telle solution ? À quelle vitesse se pro-- pagent les ondes de marée représentées par ce type de solution ? Commenter. & __ c) Donner la géométrie des lignes d'égale amplitude et des lignes d'égale phase. Représenter quelques lignes de chaque type sur un schéma. NE. 3) a) On considère maintenant deux ondes de Kelvin se propageant en sens inverse dans le canal: , ë(x, y, t) = EUROexp(ioet)[exp(--YyÆx) +a - exp(+ WÆJC)] . Le coefficient a caractérise le rapport de leurs amplitudes. Que se passe-t-il sur chaque rive si le canal est très large. ? b) On suppose ici que a = + 1. Montrer qu 'il existe des points à mamage nul (dits « points amphidmmiques »). Comparer la longueur d'onde avec la distance Ax entre deux points amphidror'niques c0nsécutifs. Ce résultat vous semble--t-il surprenant ? ' c) Si a = + 1 , le champ des Vitesses associé obtenu à l'aide des relations de la queStion IV.A.3 est alors (on ne demande pas de le vérifier) : Ë(x,y,t)= EOÆexp(ioet)[exp( _YyÆx)_ exp(YyÆx)]eîc Montrer que des p0ints où le courant est nul sont intercalés entre les points amphidromîques. Que peut-on dire de l'amplitude de la marée en ces points ? Que peut-on dire du courant aux points amphidromiques ? d) La figure 5 donne une représentation de l'onde précédente, avec a = + 1 . En + y : +b -o-o--n-u--o-c--u--o--n--n-o ' n : ligne cotidale, de phase n. n/6 Figure 5 4 un point M (x, y) du bassin, on peut écrire que E_(x,y,t)'= Re[ë(x,y,t)l = ho(x,y)COS[wt--m(x,y)l,t h0(x, y) représentant l'amplitude de l'onde de marée en ce point et cp(x, y) sa phase (on ne cherchera pas à calculer ces grandeurs). Sont représentées. 0 en pointillés, les lignes d'égale amplitude, 0 en traits pleins, les lignes « cotidales » .il s'agit des lignes d'égale phaSe. La phase de la ligne cotidale indicée par n est . , JE Cpn : ng . Quel est le sens de propagation de l'onde de marée sur la rive y = ---b ? Sur la rive y = + b ? A quoi correspondent les points A , B et C ? e) Dans le cas où 0 < lal < 1 ,les points amphidromiques ne Sont plus alignés le long de l'axe Ox et L'on peut montrer que les courbes de la figure 5 sont trans-- latées en bloc selon ey de À quelle condition sur a et b les points amphidromiques sont--ils encore obser-- vables dans le canal ? ' f) Les cartes ci-après donnent les représentations de l'onde de marée : en figure 6 en Mer du Nord, et en figure 7 dans la Manche Commenter à l'aide des con-- clusions théoriques de cette partie. Figure 6 : Onde de marée en Mer du Nord memes D'ÊGALE muse ] ... { , --011\ __1_ OÎSM «4.43 ' 4.55- , _-- ou... | maman _P"} ,'--'* * 1 * ï OEUVRES. . moa-mx "aw _' * SÏMMO , aw_ ...--_ Courbe: coiêe: en hum 3.42 -Valeur: mm « M 2 1' ' ! , 29%. .. ""' . w fiJEUR Figure 7 : Onde de marée dans la Manche (lignes cotidales uniquement) ' ooo FIN eco