
Centrale Maths 2 PC 2012
| Thème de l'épreuve | Équations linéaires |
| Principaux outils utilisés | algorithme du pivot, systèmes différentiels, suites récurrentes, suites et séries de fonctions, géométrie de la sphère, endomorphismes |
| Mots clefs | pivot, système différentiel, suites récurentes, suites de fonctions, séries de fonctions, intégrales généralisées, intégrales dépendant d'un paramètre, géométrie plane, géométrie sphérique |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)

Énoncé obtenu par reconnaissance optique des caractères
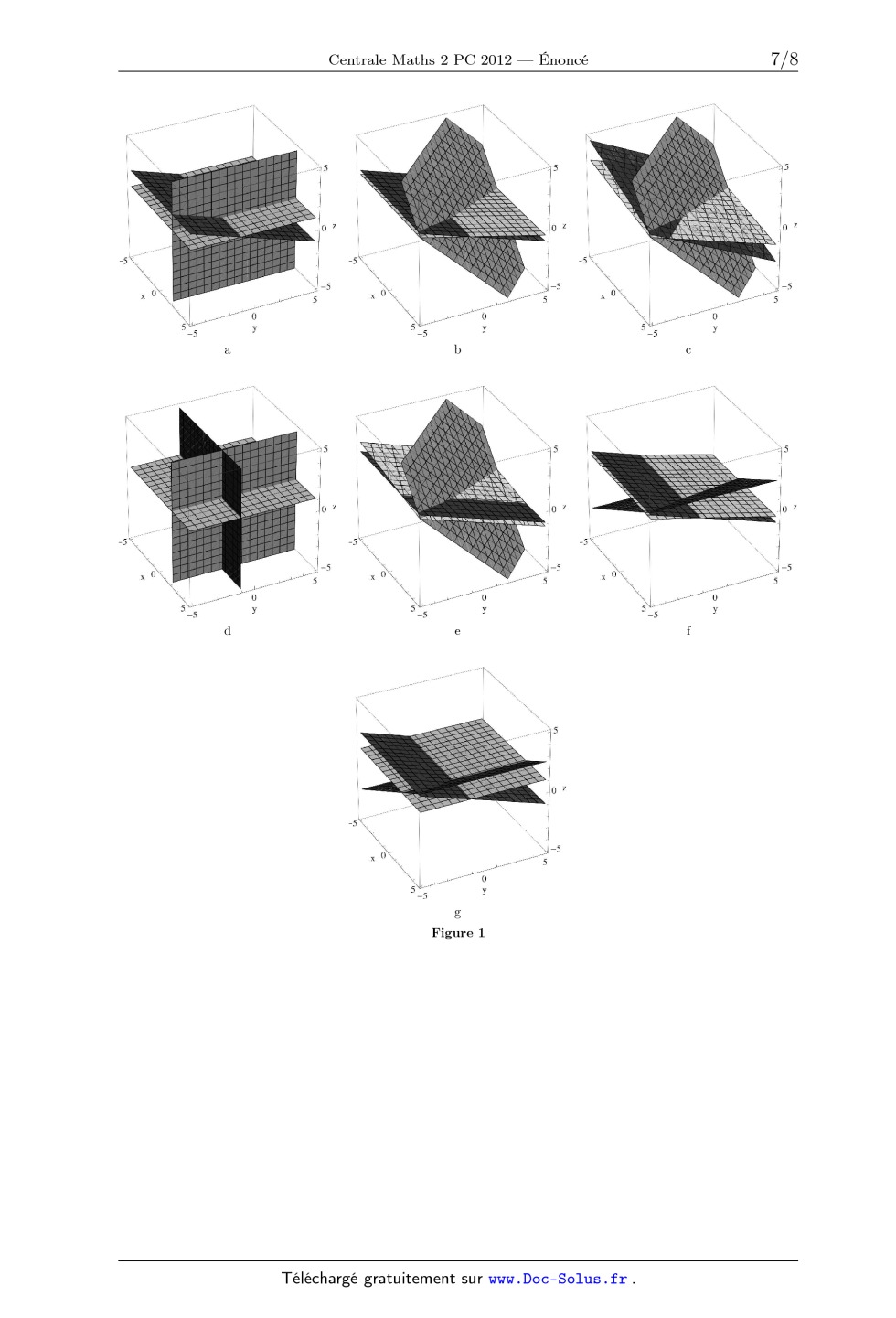
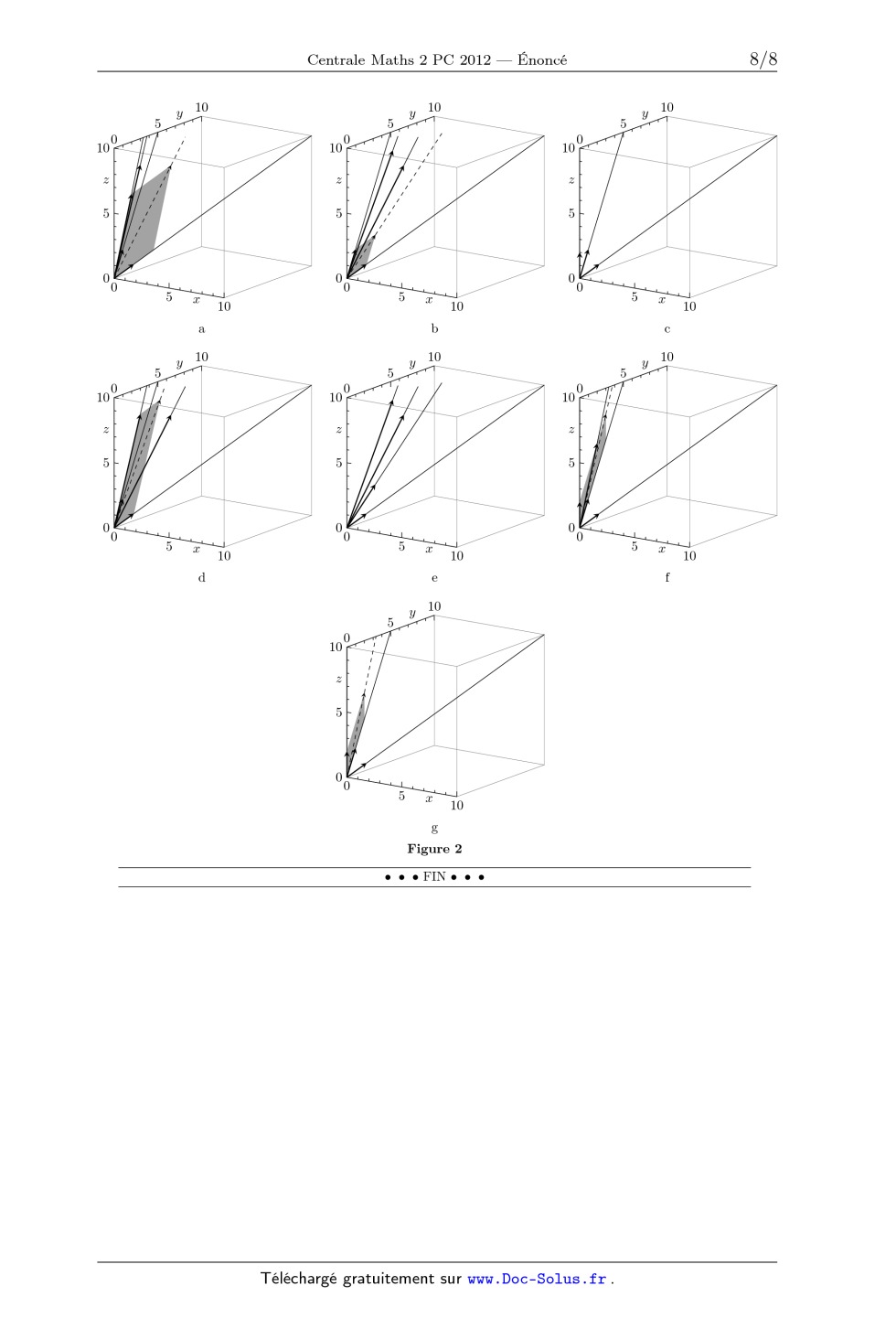
PC 4 heures Calculatrices autorisées 2012 Mathématiques 2 Dans tout le problème, le corps de base des espaces vectoriels est R. Les matrices et les systèmes linéaires sont à coefficients réels. Les suites et les fonctions sont à valeurs réelles. Équations linéaires Ce problème porte sur des applications du théorème de structure de l'ensemble des solutions d'une équation linéaire. Les parties sont largement indépendantes, mais les résultats numériques de la partie I sont utilisés dans les parties II et III. Question préliminaire Soit E et F deux espaces vectoriels sur R ; soit f une application linéaire de E dans F , et b un élément de F . Quelle structure possède l'ensemble S des solutions de l'équation f (x) = b ? I Pivots On va étudier dans cette partie différentes déclinaisons de l'algorithme du pivot. I.A Résolution d'un système linéaire : interprétation graphique On considère le système linéaire =2 x + y + z x + 2y + 4z = 4 x + 3y + 9z = 8 Afin de résoudre ce système, on a utilisé un algorithme du pivot : en effectuant des opérations sur les lignes, on a obtenu une séquence de systèmes équivalents avec de plus en plus de coefficients nuls. L'objectif est de résoudre le système en aboutissant à un système de la forme Ix = a y =b z =c où on a annulé tous les coefficients non diagonaux de la matrice du système (les coefficients au-dessous de la diagonale et les coefficients au-dessus de la diagonale). L'ordre choisi pour effectuer les opérations est indiqué sur le schéma que voici 3 5 = 1 6 = 2 4 = Chaque numéro indique après combien d'opérations élémentaires le coefficient correspondant a été annulé. Chaque opération élémentaire est de la forme Li Li + Lj (avec Ó= 0) et permet d'annuler le coefficient situé en ligne i et colonne j. Par exemple, la troisième étape a été une opération élémentaire de la forme L1 3 L1 + 3 L2 (avec 3 Ó= 0) qui a permis d'annuler le coefficient placé à la position marquée du chiffre 3 sur le schéma. À chaque étape de l'algorithme, on a représenté par un schéma les trois plans de R3 correspondant aux équations du système linéaire. Ces schémas sont reproduits en figure 1, dans le désordre. Reconstituer les étapes du calcul, et indiquer quel schéma correspond à chaque étape. I.B Résolution d'un système linéaire : interprétation vectorielle Dans cette question, on s'intéresse de nouveau au système =2 x + y + z x + 2y + 4z = 4 x + 3y + 9z = 8 4 mai 2012 09:26 Page 1/8 On considère ici les vecteurs colonnes 1 u = 1 , 1 1 v = 2 , 3 Pour résoudre le système, on cherche des réels x, y le tableau u 1 1 1 1 w = 4 , 9 2 t = 4 8 et z tels que xu + yv + zw = t. Pour cela, on va considérer v 1 2 3 w 1 4 9 t 2 4 8 qu'on interprète comme une matrice. On utilise un algorithme du pivot sur les colonnes : par des opérations élémentaires sur les colonnes, on obtient des zéros à tous les emplacements marqués d'un numéro dans le schéma ci-dessous : · 1 2 3 · · 4 5 · · · 6 Comme pour la question précédente, chaque numéro indique après combien d'opérations élémentaires le coefficient correspondant a été annulé. Chaque opération élémentaire est de la forme Cj Cj + Ci (avec Ó= 0).Par exemple, la première étape a été la réalisation de l'opération élémentaire C2 C2 - C1 , qui a fourni le tableau u v-u w t 1 0 1 2 1 1 4 4 1 2 9 8 Les deux dernières étapes ont été des opérations élémentaires de la forme C4 5 C4 + 5 C2 (avec 5 Ó= 0) pour l'avant-dernière, et enfin C4 6 C4 + 6 C3 (avec 6 Ó= 0) pour la dernière. À chaque étape de l'algorithme, on a représenté sur la figure 2 les quatre vecteurs colonnes indiqués sur la première ligne de la matrice. Pour que le dessin soit plus facile à interpréter, surtout lorsque deux vecteurs sont presque colinéaires, les droites engendrées par les vecteurs ont été représentées par un trait fin. On a également représenté la construction géométrique traduisant l'opération élémentaire, le vecteur ayant été remplacé à une étape étant représenté par une ligne discontinue. Les figures correspondant à chacune des étapes de la résolution sont représentées dans le désordre. Reconstituer les étapes du calcul, et indiquer quelle figure correspond à chaque étape. Expliquer aussi où on lit la solution du système dans la dernière matrice obtenue. I.C Pivots synchronisés Dans cette question, on étudie un algorithme permettant d'obtenir dans un unique calcul une base du noyau d'une application linéaire et une base de son image. Comme l'image est dans l'espace d'arrivée et que le noyau est dans l'espace de départ, l'algorithme de calcul s'interprète comme deux pivots synchronisés, l'un avec des vecteurs de l'espace de départ, l'autre avec des vecteurs de l'espace d'arrivée. Soit E et F deux espaces vectoriels sur R de dimensions finies n et p ; soit B = (e1 , e2 , . . . , en ) une base de E, et C une base de F ; soit f une application linéaire de E dans F et M sa matrice dans les bases B et C. On note Y1 , Y2 , . . . , Yn les colonnes de M . Soit N le tableau formé en ajoutant à M la ligne supplémentaire (e1 , e2 , . . . , en ). Le tableau N comporte donc n colonnes et p + 1 lignes, la (p + 1)-ième ligne étant (e1 , e2 , . . . , en ) ; les coefficients des p premières lignes sont donc des scalaires, tandis que ceux de la dernière ligne sont des vecteurs. On note C1 , . . . , Cn les colonnes de N . L'algorithme de recherche simultanée d'une base de Ker(f ) et d'une base de Im(f ) s'effectue grâce à des opérations élémentaires sur les colonnes de N . Conformément à l'usage pour ces algorithmes, on notera encore C1 , . . . , Cn les colonnes des tableaux obtenus aux différentes étapes. On notera C1 , . . . , Cn , les colonnes correspondant aux p premières lignes des tableaux obtenus aux différentes étapes de l'algorithme, et C1 , . . . , Cn les coefficients de la dernière ligne de ces tableaux (on rappelle que ce sont des vecteurs de E). Conformément à l'usage, on identifie les vecteurs de F et leurs colonnes associées dans la base C. Exemple -- Si E = R3 , F = R2 , et si f est l'application de R3 dans R2 de matrice 3 4 1 2 3 M= 4 5 6 le tableau N s'écrit 4 mai 2012 09:26 Page 2/8 3 4 1 2 3 N =! 4 5 6 " e1 e2 e3 Pour simplifier, on le notera avec un seul jeu de parenthèses, 1 2 3 N = 4 5 6 e1 e2 e3 On a alors 1 C1 = 4 , e1 C1 3 4 1 = , 4 ! " C1 = e1 La double opération élémentaire C2 C2 - 2C1 , C3 C3 - 3C1 conduit à 1 0 0 4 -3 -6 e1 e2 - 2e1 e3 - 3e1 I.C.1) Au départ, quels sont les liens entre ek et Yk , pour 1 6 k 6 n ? Que représentent Y1 , Y2 , . . . , Yn pour Im(f ) ? I.C.2) Après chaque étape de l'algorithme, préciser les liens entre Ck et Ck , pour 1 6 k 6 n. Que représentent C1 , . . . , Cn pour E ? Que représentent C1 , . . . , Cn pour Im(f ) ? I.C.3) À la fin de l'algorithme, on obtient un tableau pour lequel les colonnes C1 , C2 , . . . , Cq forment une matrice échelonnée de colonnes non nulles, et les colonnes Cq+1 , Cq+2 , . . . , Cn sont nulles. Expliquer où on lit une base de Ker(f ) et où on lit une base de Im(f ). I.C.4) Exemples numériques En utilisant l'algorithme que l'on vient d'étudier, déterminer une base du noyau et une base de l'image des endomorphismes f1 et f2 de R4 dont les matrices respectives, dans la base canonique de R4 sont 0 0 1 0 -3 0 1 0 0 0 0 -3 0 1 0 1 0 0 0 3 3/2 0 0 3/2 2 3 -2/3 1 2 3 -2/3 -2 II Équations différentielles et équations de récurrence Dans cette partie, nous allons explorer sur des exemples les liens entre équations différentielles linéaires et relations de récurrence linéaires. II.A Question de cours et exemple élémentaire II.A.1) Déterminer le noyau de l'application T , de RN dans RN qui, à une suite (un )nN = (u0 , u1 , u2 , . . .) associe la suite (un+1 )nN = (u1 , u2 , u3 , . . .). Soit a, b et c trois réels, avec a Ó= 0. On considère la relation de récurrence n N, aun+2 + bun+1 + cun = 0 II.A.2) Quelle est la structure algébrique de l'ensemble des suites réelles solutions de cette récurrence ? Quelle est sa dimension ? Comment fait-on pour déterminer l'ensemble des suites réelles (un )nN vérifiant cette relation de récurrence ? Quels cas doit-on distinguer pour la recherche des suites solutions ? II.A.3) Illustrer la méthode en déterminant l'ensemble A des suites réelles (un )nN vérifiant la relation de récurrence n N, un+2 + un+1 = 0. On indiquera la dimension de l'espace vectoriel des solutions. II.A.4) On suppose a Ó= 0. Écrire en Maple ou en Mathematica une fonction f de six variables telle que, pour tous a, b, c, d, e réels et tout p entier naturel, f (a, b, c, d, e, p) soit le terme d'ordre p, c'est-à-dire up , de la suite récurrente (un ) définie par u0 = d u1 = e n N, aun+2 + bun+1 + cun = 0 Dans la suite de cette partie, on va étudier en parallèle un système différentiel linéaire SD et un système d'équations de récurrence SR s'écrivant de façon analogue. Le système différentiel SD a comme fonctions inconnues deux fonctions réelles x et y de classe C 2 sur R, et s'écrit ; 2x + 3y - 4x - 6y - 6x - 9y = 0 SD : -6x - 6y + 14x + 15y + 12x + 18y = 0 4 mai 2012 09:26 Page 3/8 Le système d'équations de récurrence SR porte sur deux suites réelles inconnues (un ) et (vn ), et s'écrit, pour tout n N, ; 2un+2 + 3vn+2 - 4un+1 - 6vn+1 - 6un - 9vn = 0 SR : -6un+2 - 6vn+2 + 14un+1 + 15vn+1 + 12un + 18vn = 0 Pour déterminer les solutions de SD et de SR , on va d'abord transformer leurs écritures pour se ramener à des systèmes équivalents écrits sous forme standard. On note un x vn y X= x , Un = un+1 y vn+1 On a alors x y X = x , y Un+1 un+1 vn+1 = un+2 vn+2 On cherche une matrice carrée A de taille 4 × 4 permettant d'écrire SD et SR sous la forme X = AX et Un+1 = AUn . II.B Découplage des systèmes d'équations d'équations différentielles équivalent à SD et En utilisant l'algorithme du pivot, déterminer un système SD pouvant s'écrire sous la forme voulue X = AX. Par la même méthode, déterminer un système SR d'équations de récurrence équivalent à SR et pouvant s'écrire sous la forme voulue Un+1 = AUn . On pourra diviser la feuille en deux colonnes pour traiter en parallèle les deux systèmes. Les calculs communs aux deux systèmes pourront alors n'être effectués qu'une seule fois. II.C Interprétation de la réduction matricielle On considère à présent le système différentiel SD : X = AX et le système de récurrence SR : n N, Un+1 = AUn . On admettra que les dimensions de l'espace vectoriel des solutions de SD et de l'espace vectoriel des solutions de SR sont égales. II.C.1) Si est une valeur propre réelle de A, et si u est un vecteur propre de A pour la valeur propre , justifier que la fonction : R R4 , t Ô et u est une solution de SD . Justifier aussi que la suite vectorielle : N R4 , n Ô n u est une solution de SR . II.C.2) Si A est diagonalisable sur R et si (u , uµ , u , u ) est une base de vecteurs propres associés respectivement aux valeurs propres , µ, et (pas nécessairement distinctes), que représente la famille ( , µ , , ) pour l'ensemble des solutions de SD ? Que représente la famille ( , µ , , ) pour l'ensemble des solutions de SR ? II.D Résolution numérique II.D.1) On considère à présent 0 0 A= 0 2 0 0 0 3 1 0 3 -2/3 0 1 3/2 1 À l'aide éventuellement de la calculatrice, calculer le polynôme caractéristique de A, puis déterminer les valeurs propres de cette matrice, ainsi que des vecteurs propres associés à ces valeurs propres. II.D.2) En déduire l'ensemble des solutions de SD et l'ensemble des solutions de SR . Déterminer enfin les ensembles de solutions respectifs de SD et de SR . III Exemple en géométrie III.A Nombre de zones découpées sur une sphère par n cercles Soit un le nombre maximal de zones distinctes de la sphère unité que n cercles distincts tracés sur cette sphère peuvent déterminer. III.A.1) Combien de points d'intersection peuvent avoir deux cercles tracés sur la sphère unité ? (On justifiera succinctement.) III.A.2) Déterminer u1 , u2 et u3 . 4 mai 2012 09:26 Page 4/8 III.A.3) Montrer que la suite (un )nN vérifie la relation de récurrence n N , un+1 = un + 2n. Considérons n cercles tracés sur la sphère. Traçons un (n + 1)-ième cercle sur la sphère qui rencontre les n cercles existants en délimitant un nombre maximal de zones. En notant p le nombre de points d'intersection entre le (n + 1)-ième cercle et les cercles précédemment tracés, on pourra remarquer que les arcs du n + 1-ième cercle délimités par les p points d'intersections sont des frontières entre deux nouvelles zones. III.B Étude des suites (tn )nN vérifiant la relation de récurrence n N, tn+1 = tn + 2n Soit T l'endomorphisme de RN qui, à toute suite (tn )nN , associe la suite (tn+1 )nN . Soit v la suite de N dans R définie par vn = 2n pour tout n N. Soit enfin l'endomorphisme de RN défini par = T - Id, où Id est l'application identité de RN . III.B.1) Montrer qu'une suite t = (tn ) vérifie la relation de récurrence n N, tn+1 = tn + 2n si et seulement si (t) = v. On note S l'ensemble des suites vérifiant cette relation de récurrence. Préciser la structure de S. III.B.2) Déterminer le noyau de . III.B.3) Pour tout entier naturel p > 0, soit Ep l'espace vectoriel des suites réelles polynomiales de degré inférieur ou égal à p, c'est-à-dire l'ensemble des suites (wn ) pour lesquelles il existe un polynôme P , à coefficients réels et de degré inférieur ou égal à p, vérifiant wn = P (n) pour tout n N. Quelle est la dimension de Ep ? Vérifier que, pour tout entier p > 0, Ep est stable par . On note p la restriction de à Ep . Comparer Ker (p ) et Ker(). Montrer que, pour tout p > 1, Im (p ) = Ep-1 . III.C Conclusion Déduire des questions précédentes qu'il existe un polynôme P de degré 6 2 tel que, pour tout entier n > 1, on ait un = P (n). Écrire le système d'équations donnant u1 , u2 et u3 . En déduire, pour tout n N, une expression de un en fonction de n. IV Équations fonctionnelles linéaires Dans cette partie, on va d'abord explorer l'effet de la composition des applications sur des exemples simples d'équations fonctionnelles. On se concentrera ensuite sur l'équation fonctionnelle 1 y(x + 1) - y(x) = (IV.1) (1 + x)2 en utilisant des propriétés linéaires en analyse. IV.A Résultats préliminaires IV.A.1) Soit T l'ensemble des fonctions continues y de ] - 1, +[ dans R telles que, pour tout x ]-1, +[, 1 . Quelle structure T possède-t-il ? (On vérifiera les hypothèses du théorème on ait y(x + 1) - y(x) = (1 + x)2 invoqué). IV.A.2) Quelles sont les fonctions périodiques de ]-1, +[ dans R possédant une limite en + ? IV.B Quelques équations fonctionnelles linéaires élémentaires IV.B.1) On considère l'équation fonctionnelle f (x + 1) - f (x) = 1 (IV.2) Préciser l'ensemble K des fonctions continues de R dans R vérifiant l'équation IV.2 pour tout réel x. IV.B.2) On note lb la fonction logarithme binaire, définie par lb(x) = ln(x)/ ln(2). Soit f une solution sur R de l'équation fonctionnelle IV.2. Déterminer une équation fonctionnelle vérifiée par g = f lb sur ]0, +[, ainsi qu'une équation fonctionnelle vérifiée par h = f lb ln sur ]1, +[. Si f est en outre de classe C 1 , déterminer une équation fonctionnelle vérifiée par la fonction dérivée k de h. IV.B.3) Préciser l'ensemble L (resp. M, N ) des fonctions continues g de ]0, +[ dans R (resp. h de ]1, +[ dans R, k de ]1, +[ dans R), telles que, pour tout x ]0, +[ (resp. ]1, +[, ]1, +[), on ait g(2x) - g(x) = 1 ! " h x2 - h(x) = 1 Ú x2 k=1 x 4 mai 2012 09:26 Page 5/8 (IV.3) (IV.4) (IV.5) IV.C Étude de l'équation fonctionnelle IV.1 -- Recherche d'une première solution particulière -1 Pour tout entier n > 0, soit un la fonction de ]-1, +[ dans R définie par un (x) = . (n + x)2 Ø uk converge simplement sur ]-1, +[. IV.C.1) Montrer que la série de fonctions k>1 Soit U = Ø uk la somme de cette série de fonctions. Pour tout entier n > 1, on note Un la n-ième somme k=1 partielle de U définie par Un = n Ø uk , et on note Rn = U - Un son reste d'ordre n. k=1 IV.C.2) Montrer que U est de classe C 1 sur ]-1, +[. Quelles sont les variations de U ? IV.C.3) Montrer que U T IV.C.4) Montrer que pour tout x > 0, on a Ú + x -1 dt 6 U (x) 6 t2 Ú + x+1 -1 dt. t2 En déduire un équivalent de U au voisinage de +. IV.D Représentation intégrale d'une solution Soit V la fonction définie par Ú + -xt te V (x) = dt. 1 - et 0 IV.D.1) Déterminer l'ensemble de définition de V . IV.D.2) Montrer que V possède une limite en + que l'on déterminera. IV.D.3) Montrer que V est une solution de l'équation fonctionnelle IV.1 sur ]-1, +[. IV.D.4) Comparer U et V . 4 mai 2012 09:26 Page 6/8 a b c d e f g Figure 1 4 mai 2012 09:26 Page 7/8 y 10 5 10 y 10 5 0 10 0 10 z z z 5 5 5 0 0 0 5 x 0 0 5 10 a 10 10 0 10 z 5 5 5 0 x 0 0 5 10 d x 10 e 10 0 z 5 0 0 5 x 10 g Figure 2 · · · FIN · · · 4 mai 2012 09:26 10 0 0 5 x f y 10 5 x y 10 5 z 5 5 c y 10 5 0 0 0 10 z 0 0 b y 10 5 x y 10 5 Page 8/8 10