
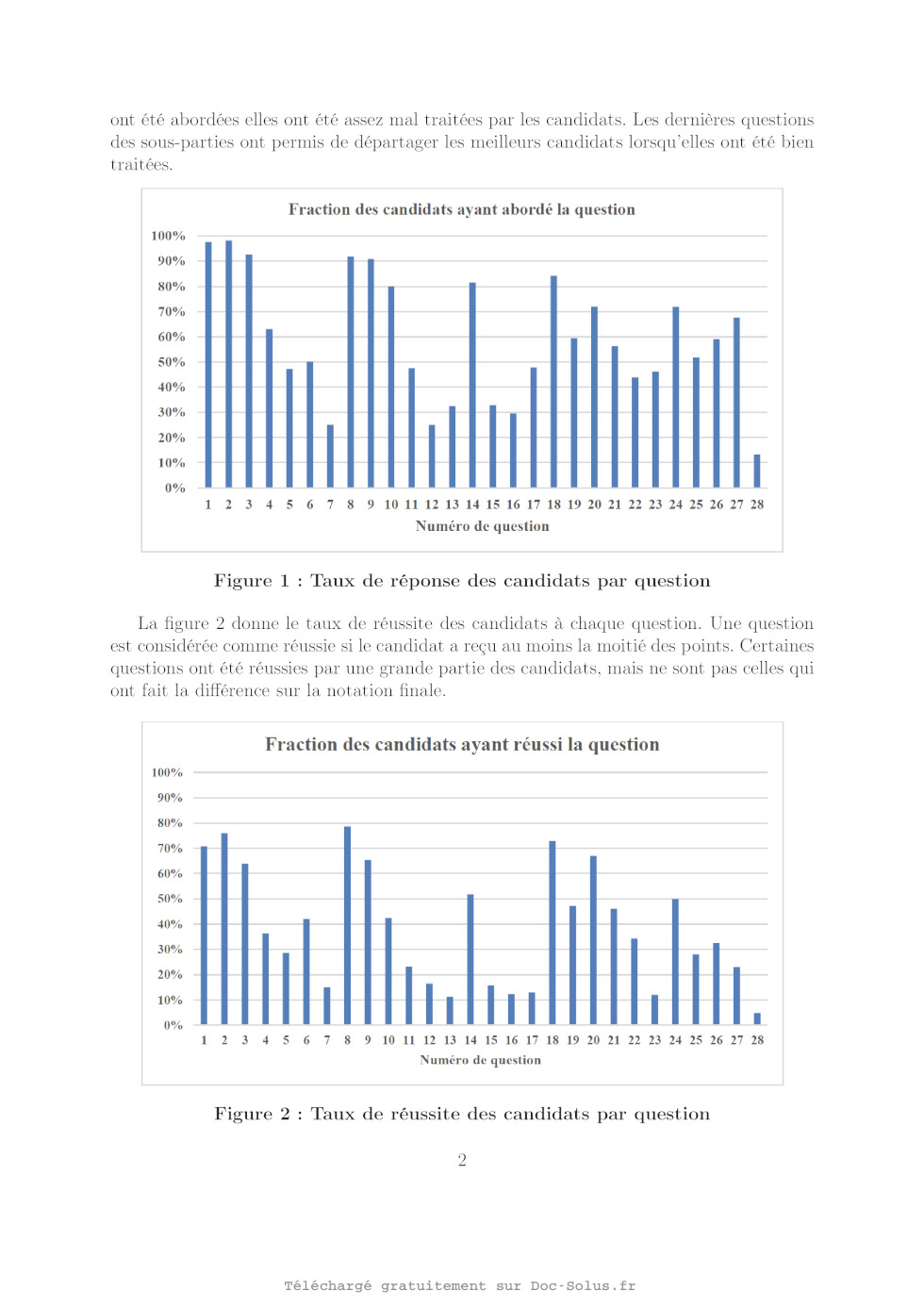
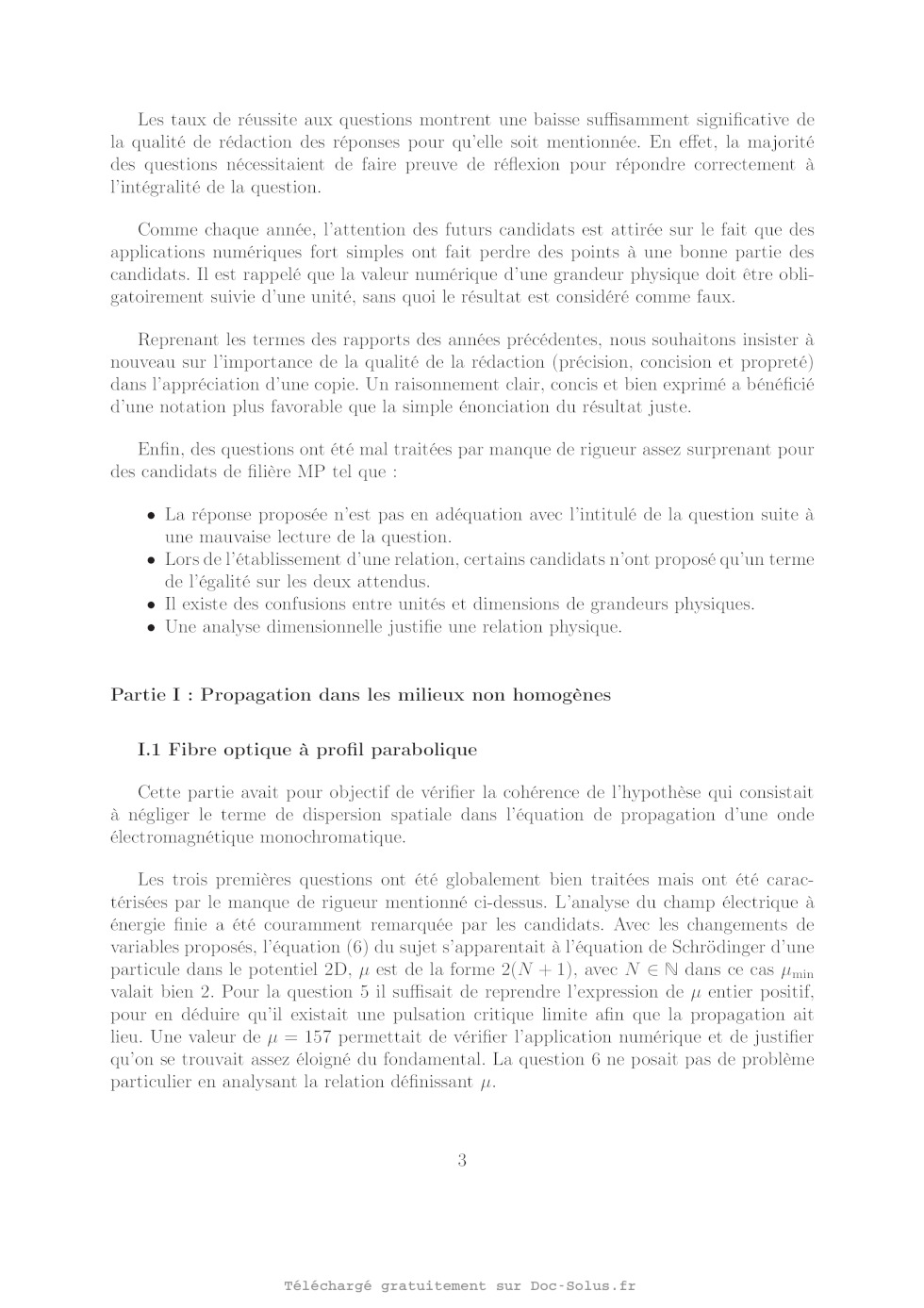
X Physique et Sciences de l'ingénieur MP 2016
| Thème de l'épreuve | Propagation dans les milieux non homogènes. Simulateur de conduite de véhicule à deux roues. |
| Principaux outils utilisés | électromagnétisme, physique quantique, mécanique du solide, asservissements |
| Mots clefs | fibre optique, oscillateur quantique, milieu stratifié, approximation BKW, angles d'Euler, simulateur |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)







Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
FILIÈRE
CONCOURS D'ADMISSION 2016
MP
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGÉNIEUR (X)
(Durée : 4 heures)
Les calculatrices ne sont pas autorisées pour cette épreuve.
Les deux parties de l'épreuve sont indépendantes et elles-même composées de
parties largement
indépendantes ; on les traitera dans l'ordre de son choix. Il n'est pas demandé
de démontrer les
relations données dans l'énoncé.
1
Partie I : Propagation dans les milieux non homogènes
Préambule Cette partie concerne la propagation d'ondes électromagnétiques
lumineuses dans des
milieux non chargés
d'indice n = n (x, y, z) non uniforme spatialement. On admettra dans ce cas la
-
-
-
---- !
2
relation div n E = 0 = n2 div E + E · grad n2 ; cette relation montre que, en
raison du terme dit
-
de dispersion spatiale (en bleu) div E n'est pas, en -général,
nul. En régime harmonique de pulsation
, la dépendance
temporelle du champ électrique E est en exp (-i t). L'équation de propagation
-
du champ E d'une onde électromagnétique monochromatique prend alors l'une ou
l'autre des formes
équivalentes (les termes de dispersion spatiale sont sur l'accolade, en bleu)
-
E + n2
-
E + n2
-
-
2 - ----
E
-
grad
div
E
= 0,
2
c
{z
}
|
-
2 - ---- n- ---- h 2 io
E + grad E · grad ln n
= 0.
2
c
|
{z
}
(1)
(2)
-
Une pratique courante est cependant de poser que l'équation de propagation de E
se déduit en
force brute de l'équation de propagation dans un milieu homogène - équation de
Helmholtz -, en y
remplaçant l'indice constant par l'indice variable n (x, y, z) et en ignorant
les termes de dispersion
2
,
spatiale. On établit alors l'équation de propagation, définissant k0 = =
c
-
E + n2
-
-
-
2 -
E = E + n2 k02 E = 0 ,
2
c
(3)
où c est la célérité de l'onde. On peut se demander si cette manière de faire
est légitime. Tel n'est
pas toujours le cas. Les deux cas traités ci-après sont cependant des exemples
de réponse positive à
cette question.
1
1.1
Fibre optique à profil parabolique d'indice et oscillateur quantique
Une onde électromagnétique monochromatique se propage dans une fibre optique
modélisée par
un cylindre de rayon R, illimité dans la direction z et à l'intérieur duquel le
profil radial d'indice est
2
n (r) =
n20
A
x2 + y 2
1-
a2
B
, avec a R R ' et 2n0 a.
(4)
Ci-dessus, a est une longueur qui définit la largeur du profil d'indice selon
une section droite du
cylindre ; cet indice varie donc peu sur une distance de l'ordre quelques
longueurs d'onde : l'inégalité
de la relation (4) signifie en effet Rayon du cylindre (un nombre de l'ordre
de 10 - 20) ×
échelle de variation spatiale de l'indice. Dans la suite, on ne
se préoccupera pas de conditions aux
-
limites et l'on se restreindra à la forme suivante du champ E , où la constante
de propagation est
réelle et strictement positive et y est le vecteur unitaire selon la direction
y du repère de référence :
-
(5)
E = E (x, y) y exp [j (z - t)] .
On néglige provisoirement le terme de dispersion spatiale et l'on accepte
l'équation de propagation
-
E +
n20
A
x2 + y 2
1-
a2
B
-
2 -
E = 0.
2
c
(6)
1. Établir l'équation (scalaire) de propagation de E (x, y) ; posant q0 = n0 k0
puis µ =
q02 - 2
a,
q0
41
q0 2
exprimer cette équation en termes des variables réduites (, ) =
(x, y).
a
L'équation de propagation du champ ressemble à l'équation de Schrödinger
stationnaire d'un
oscillateur harmonique 2D, de masse m et d'énergie propre EN
3
-
1
2
~2
1
(x, y) + m 2 x2 + y 2 (x, y) = EN (x, y).
2m
2
(7)
On admet que EN = (N + 1) ~, où N N. L'énergie de l'état de plus basse énergie
est ainsi
3
41
5
6
"
m 2
m ! 2
2
E0 = ~ ; il lui correspond la fonction d'onde normalisée 0 =
exp -
x +y
.
~
2~
ò
m
puis exprimer l'équation (7) en termes des variables réduites
2. Vérifier la dimension de
~
ò
m
(x, y).
(u, v) =
~
3. On impose à la solution de l'équation (6) la condition
ÚÚ
-
ë E ë2 dx dy = V 2 , où V est un
R2
réel positif, dont on donnera l'unité. Quel est le sens physique de cette
normalisation ?
q 2 - 2
4. Quelles sont les valeurs possibles de µ = 0
a, introduit à la question 1 ? Montrer que le
q0
mode fondamental de propagation est gaussien, avec µ = µmin = 2.
5. Montrer que, pour une valeur donnée de µ, seuls les modes de pulsation
supérieure à une
certaine pulsation critique c pourront se propager. Quelle valeur de µ !peut-on
choisir pour" la
longueur d'onde c = 0, 6 × 10-6 m, lorsque n0 = 3 et a = 5 × 10-6 m c = 3 × 108
m · s-1 ?
2
6. On considère les modes d'ordre peu élevé (µ de l'ordre de quelques unités)
et une longueur
d'onde de l'ordre de 0, 6 × 10-6 m. Par définitions, la vitesse de phase de
l'onde est v = et
c
d
. Montrer que v >
et que vg ne dépend pas de µ.
la vitesse de groupe vg =
d
n0
7. A-t-il été-il légitime de négliger dans l'équation de propagation le terme
de dispersion spatiale
---- h-
----
! i
2 -
grad E · grad ln n2 devant le terme de dispersion temporelle n2 2 E ? On pourra
utiliser les
c
----
f
1 f
f
+
r +
z, y = r sin + cos .
coordonnées cylindriques et la relation grad f =
r
r
z
1.2
Mode TE dans un milieu stratifié
Dans un milieu stratifié l'indice optique n varie selon une direction notée z,
portant le vecteur
unitaire z. On note (xz) le plan de propagation (voir Figure 1) et l'on
convient que les diverses
Figure 1 Propagation dans un milieu stratifié, où l'indice varie selon la
direction z.
grandeurs associées à l'onde, représentées de manière complexe, ne dépendent
pas de y ; par
suite de l'homogénéité de l'espace selon x, elles varient comme exp (ix), où
est la constante
de propagation, réelle et strictement positive. Pour le reste, nous reprenons
les considérations et
les notations du préambule.
-
Dans le mode Transverse Électrique (TE) E est dirigé selon y ; ses composantes
sont notées
Ex = Ez = 0, Ey = E (z) exp [i (x - t)]
(8)
de sorte que l'équation de propagation (3) se ramène à l'équation scalaire,
définissant kz
d2 E
d2 E 2 2
2
n
k
-
E
=
+
+ kz2 E.
0
dz 2
dz 2
(9)
On introduit alors, formellement, d'une part le vecteur d'onde local, ~k (z) =
[, 0, kz (z)], avec
2
2
.
k 2 (z) = n2 2 = 2 + kz2 (z), d'autre part la longueur d'onde locale , (z) =
c
kz (z)
-
8. Montrer que, dans un mode TE, B est entièrement contenu dans le plan de
propagation (xz).
9. La relation E (z) = A (z) exp [ik0 S (z)] exprime l'inconnue E en termes du
couple, non unique,
des fonctions réelles A et S. Que devient l'équation (9), en termes du couple
(A, S) ? On
ordonnera le résultat selon les puissances décroissantes de k0 . Ce sera
l'équation [B].
10. Estimer la valeur de k0 dans le domaine optique. Dans quel sens peut-on
dire que « k0 est
grand » ? Une manière approchée de résoudre [B] est de supposer que aucun des
coefficients de
3
k0 n'est exceptionnellement grand et d'en annuler séparément chaque terme, à
commencer par
le terme de plus haut degré en k0 . Quelle équation obtient-on ? Donner alors
la relation entre
dS
, ce dernier étant choisi positif.
n(z) et
dz
11. Comment se simplifient les résultats ci-dessus lorsque n est constant ?
Vérifier que l'on retrouve
les résultats habituels.
L'approximation de l'optique géométrique, étudiée ici, pose que le couple (A,
S) effectif est celui où
2
et négligeables devant celles de S.
les variations de A sont petites à l'échelle de 0 =
k0
12. Montrer alors que, dans un voisinage de quelques 0 autour d'un point P (xp
, zp ) où l'indice
est n (xp , zp ) = np , c'est-à-dire pour x = xp + et z = zp + avec de
l'ordre de 0 , l'onde est
localement plane et progressive : toute composante X d'un vecteur du champ
s'exprime sous la
forme X (x, z, t) X0 (xp , zp ) exp [i (k0 np + - t)].
-
-
þ de composantes [, 0, k0 np ].
13. Préciser le lien entre les vecteurs E , B et K
1.3
L'approximation semi classique en mécanique quantique ; une analogie
Les fonctions d'onde des états stationnaires d'une particule de masse m et
d'énergie E dans le
« potentiel » unidimensionnel U (x) sont solutions de l'équation de Schrödinger
-
~2 d2
+ U (x)(x) = E(x).
2m dx2
(10)
Dans les régions dites quasi classiques, U (x) E ; l'impulsion classique de la
particule étant
p2 (x) = 2m [E - U (x)], on définit,
avec la relation de de Broglie, la longueur d'onde
3 par analogie
4
h
h
2
locale par (x) =
~=
et l'équation (10 ) se réécrit
=
p (x)
k (x)
2
d2
+ k 2 (x) (x) = 0.
dx2
(11)
L'optique géométrique se déduit de l'optique ondulatoire en considérant la
limite 0 ; de la
même manière, le régime quantique semi-classique est la solution
lorsque, par la pensée,
5 3 limite de (10)46
~
i
on considère la limite ~ 0. On pose alors (x) = exp
0 (x) + 1 (x) , où 0 et 1 R.
~
i
14. L'approximation d'ordre zéro consiste à ne garder que 0 dans l'expression
de ; déterminer
la solution de
3 l'équation
4 (10) à l'ordre 0. Vérifier que, si p est constant (p = p0 > 0), alors
p0 x
(x) exp ±2i
(on ne se préoccupera pas de normalisation).
h
15. Établir que, C+ et C- étant des constantes complexes dont on ne se
préoccupera pas, la solution
d'ordre 1 est
i
C+
exp
(x) = ð
~
|p (x)|
5
Ú x
C-
i
p (u) du + ð
exp -
~
|p (x)|
6
5
Ú x
p (u) du
6
(12)
1
. Ce résultat est-il cohérent avec ce que, intuitivement,
|p (x)|
l'on peut dire de l'occupation de l'espace par l'oscillateur harmonique
classique 1D ?
16. Il ressort de (12) que | (x)|2
4
2
Partie II : Simulateur de conduite de véhicule à deux roues
Introduction aux simulateurs de conduite Les simulateurs de conduite à base
mobile pour
véhicules à deux roues fournissent des indices de mouvement en cohérence avec
les mouvements
réels du véhicule. Ils sont souvent constitués d'un bâti fixe et d'une partie
mobile comprenant le
châssis de la moto et des chaînes cinématiques mues par des actionneurs. Leur
but est de restituer
les mouvements transitoires, d'incliner la plateforme pour les mouvements lents
et, lorsque la vitesse
du véhicule virtuel est constante, de retourner à une position calibrée, dite
position neutre. Les
limitations de ces dispositifs sont partiellement compensées au moyen
d'algorithmes qui réalisent
des compromis entre fidélité de restitution du mouvement et limites physiques
de la plateforme. La
plateforme à structure parallèle étudiée ici est représentée dans les Figures
2, 3 et 4 1 .
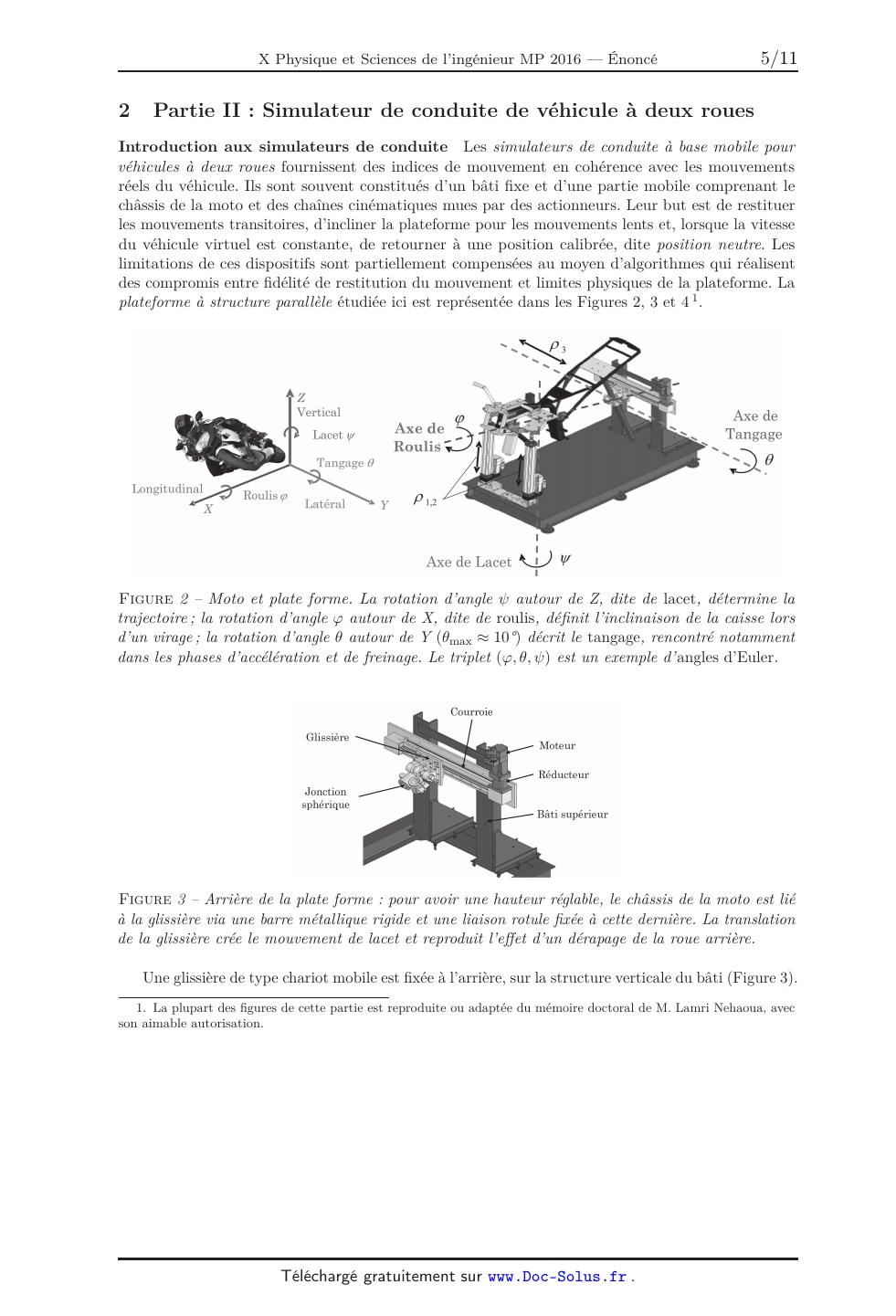
Figure 2 Moto et plate forme. La rotation d'angle autour de Z, dite de
lacet, détermine la
trajectoire ; la rotation d'angle autour de X, dite de roulis, définit
l'inclinaison de la caisse lors
d'un virage ; la rotation d'angle autour de Y (max 10°) décrit le tangage,
rencontré notamment
dans les phases d'accélération et de freinage. Le triplet (, , ) est un exemple
d'angles d'Euler.
Figure 3 Arrière de la plate forme : pour avoir une hauteur réglable, le
châssis de la moto est lié
à la glissière via une barre métallique rigide et une liaison rotule fixée à
cette dernière. La translation
de la glissière crée le mouvement de lacet et reproduit l'effet d'un dérapage
de la roue arrière.
Une glissière de type chariot mobile est fixée à l'arrière, sur la structure
verticale du bâti (Figure 3).
1. La plupart des figures de cette partie est reproduite ou adaptée du mémoire
doctoral de M. Lamri Nehaoua, avec
son aimable autorisation.
5
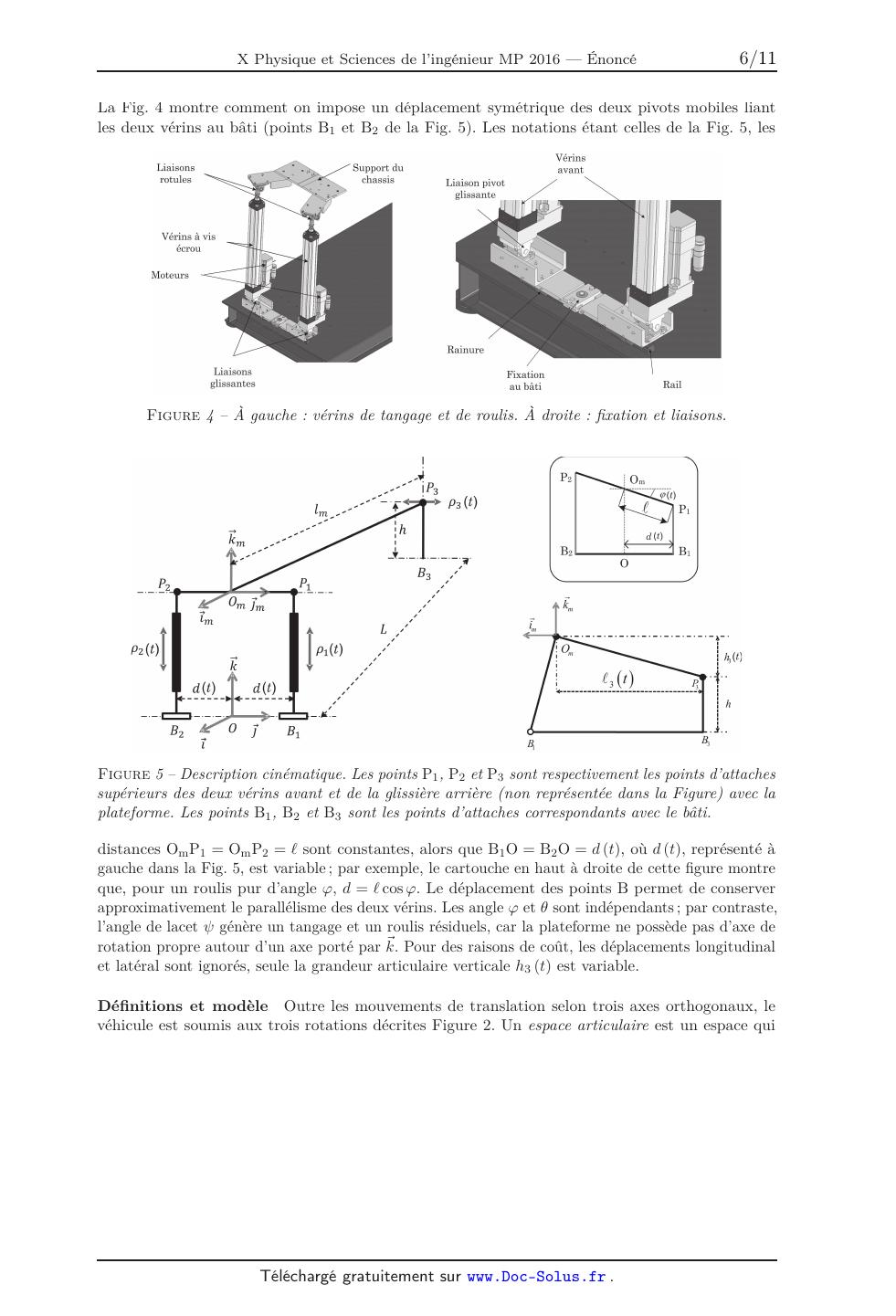
La Fig. 4 montre comment on impose un déplacement symétrique des deux pivots
mobiles liant
les deux vérins au bâti (points B1 et B2 de la Fig. 5). Les notations étant
celles de la Fig. 5, les
Figure 4 À gauche : vérins de tangage et de roulis. À droite : fixation et
liaisons.
Figure 5 Description cinématique. Les points P1 , P2 et P3 sont
respectivement les points d'attaches
supérieurs des deux vérins avant et de la glissière arrière (non représentée
dans la Figure) avec la
plateforme. Les points B1 , B2 et B3 sont les points d'attaches correspondants
avec le bâti.
distances Om P1 = Om P2 = sont constantes, alors que B1 O = B2 O = d (t), où d
(t), représenté à
gauche dans la Fig. 5, est variable ; par exemple, le cartouche en haut à
droite de cette figure montre
que, pour un roulis pur d'angle , d = cos . Le déplacement des points B permet
de conserver
approximativement le parallélisme des deux vérins. Les angle et sont
indépendants ; par contraste,
l'angle de lacet génère un tangage et un roulis résiduels, car la plateforme
ne possède pas d'axe de
rotation propre autour d'un axe porté par ~k. Pour des raisons de coût, les
déplacements longitudinal
et latéral sont ignorés, seule la grandeur articulaire verticale h3 (t) est
variable.
Définitions et modèle Outre les mouvements de translation selon trois axes
orthogonaux, le
véhicule est soumis aux trois rotations décrites Figure 2. Un espace
articulaire est un espace qui
6
a pour référence le repère lié à chaque articulation motorisée. Les coordonnées
associées sont les
coordonnées articulaires. L'espace opérationnel a pour référence le repère lié
à l'organe terminal de la
plateforme. Nous nous intéresserons successivement aux
-- modèle géométrique, reliant les coordonnées articulaires et opérationnelles,
-- modèle cinématique, reliant les vitesses articulaires et opérationnelles
-- et à une esquisse de description de la commande de la plate forme.
La géométrie inverse définit les coordonnées articulaires des différents
actionneurs en fonction
des coordonnées et de l'orientation de la plateforme. On introduit pour ce but
un repère R(O,~i, ~, ~k)
lié au bâti et un repère mobile Rm (Om ,~im , ~m , ~km ) lié à la moto de la
manière
suivante (Figure 6) :
~
~
-- La rotation de lacet () autour de k donne le repère R1 O,~i1 , ~1 , k1 ,
avec ~k1 = ~k.
-- La rotation de tangage () autour de ~1 donne le repère R2 O,~i2 , ~2 , ~k2 ,
avec ~2 = ~1 .
-- La rotation de roulis () autour de ~i2 donne le repère Rm Om ,~im , ~m , ~km
, avec ~im = ~i2 .
Figure 6 Repères pour lacet, tangage et roulis. Les axes de rotation sont
représentés en rouge. Les
rotations font passer des « vecteurs noirs » aux « vecteurs bleus ».
Dans le repère mobile Rm , les coordonnées des divers points P sont définies par
------
Om P1 = m = [0 0]T
-
Om P2 = - m = [0 - 0]T
-
------
-
Om P3 = -3 i m - h3 (t) k m = [-3 0 - h3 ]T
-
------
La matrice de rotation définissant l'orientation du repère mobile Rm par
rapport au repère fixe R
e = (rij ). L'axe de roulis est dans le plan de symétrie vertical de la moto et
le déplacement
est notée R
de Om selon l'axe ~ est nul (ym = 0). La partie supérieure mobile du simulateur
est repérée dans R
par les coordonnées cartésiennes (xm , ym , zm ) de Om dans R et les angles
d'Euler (, , ).
~ dans le repère R sera noté X
~
Dans toute la suite, le triplet des composantes du vecteur X
;
R
----
-----
------
ainsi, la relation intrinsèque OP3 = OOm + Om P3 entraîne-t-elle la relation
algébrique entre les
coordonnées cartésiennes de l'origine Om et les angles d'orientation de la
plate forme mobile (dans
ce cas particulier, ym = 0) :
---
OP 3
R
-----
= OOm
R
------
+ R Om P3
Rm
,
(13)
-L
xm
-3
xm = -L + r11 3 + r13 h3
3 = -r21 3 - r23 h3
soit 3 = ym + R 0 , de sorte que
z
-h3
zm
h
m = h + r31 3 + r33 h3 .
Les variables articulaires xm , ym , zm et 3 ainsi déterminées, reste à trouver
les variables articulaires
des deux vérins avant, notées respectivement 1 et 2 , qui définissent
la longueur de chaque vérin en
---- ----
2
fonction de l'orientation de la partie supérieure mobile : i = Bi Pi · Bi Pi .
7
2.1
Modèle géométrique et cinématique inverses de la plateforme du simulateur
17. On se propose de déterminer la course de chacun des trois vérins,
permettant de respecter les
caractéristiques géométriques de chaque degré de liberté, telles que données
dans le tableau
ci-après (le débattement est le double de la valeur maximale).
Degré de liberté
Lacet
Tangage
Roulis
10
10
72
90
30
360
Valeur maximale (degrés)
!
Vitesse angulaire maximale degrés ·
s-1
Pour ce but, on adopte les valeurs numériques L = lm = 1, 2 m, l = d = 0, 2 m,
l3 = 1, 1 m,
h = 0, 5 m et h3 = 0, 4 m. En s'appuyant sur des schémas et en utilisant la
courbe de la Fig. 7,
déterminer la course de chacun des trois vérins, d'abord dans le cas du roulis,
ensuite dans le
cas du lacet. Vérifier enfin que les valeurs trouvées sont compatibles avec la
valeur maximale
de l'angle de tangage.
Figure 7 Sinusoïde.
----
18. Exprimer Bi Pi
R
----
(i = 1, 2) en fonction de Bi O
----
que la composante sur y des Bi Pi
R
R
-----
, OOm
R
------
, Om Pi
Rm
et R. Considérant
est nulle, montrer que d = r22 . Introduisant les vecteurs
----
-
unitaires ui =
Bi Pi
, montrer que la vitesse articulaire des vérins avant est
i
---
- -
i = Bi Pi · ui .
(14)
La cinématique inverse, qui consiste à déterminer les positions et rotations
d'articulations permettant
d'atteindre un objectif donné, se fait à partir des paramètres des
articulations. Conformément à la
~ = ~k + ~1 + ~i2 le vecteur rotation de la plateforme (aussi
Figure 6, on note, respectivement,
nommé vecteur de la vitesse angulaire), ~q = , , et l'on admet que, dans
R(O,~i, ~, ~k) lié au bâti,
0 - sin cos cos
~
= E ~q = 0 cos cos sin ~q.
1
0
- sin
8
(15)
A
B
þ
Le torseur cinématique de la plateforme par rapport au bâti, exprimé en Om est
W = ----
- .
OOm
19. Indiquer soigneusement, mais sans effectuer les calculs, la méthode
conduisant à la relation 15 ;
on précisera, notamment, le paramétrage des angles.
---
-
20. En considérant un résultat obtenu à 1la question
18,
exprimer
B
Pi (i = 1, 2) dans R en fonction
i
-
-----
2
-
--
-
- ----
-
å Om Pi
de Bi O , OOm dans R et de R
.
Rm
21. Établir la relation
3
1------2
-
å Om P3
3 = OOm · j + R
-----
-
Rm
j
4
-
· =
3
1------2
å Om P3
R
-
Rm
j
4
-
· .
(16)
22. Le résultat établi à la question 20 conduit aux deux relations
3
1------2
----
-
- -
-
å Om Pi
i = Bi O · ui + OOm · ui + R
-
---
è--éT
On définit Ai
5
3
1------2
-
å Om Pi
i = OOm · ui + R
-----
1------2
å Om Pi
= R
-
Rm
ui
6T
Rm
ui
4
-
· .
-
· ui ,
(17)
(18)
(uþ3 = þ). Vérifier que
è--éT
[1 , 2 , 3 ] =
2.2
-
Rm
4
A1
è--éT
A2
è--éT
Ai
-
-
T
u1
u2
W.
-T
-
-
T
(19)
j
Introduction à la perception
Les accélérations du véhicule ne pouvant être reproduites à l'identique, une
commande est
nécessaire, transformant la trajectoire du véhicule simulé en un mouvement
réalisable par la plateforme, tout en prenant en compte les caractéristiques de
la perception.
2.2.1
Modélisation des capteurs ; algorithme du pire cas
Le principe de la cinématique inverse est représenté dans la Figure 8.
Comme le montre la Figure 9, page 10, les grandeurs de référence sont d'abord
calibrées, ce
qui permet de réduire d'autant les déplacements du simulateur. La composante
transitoire de
l'accélération est détectée derrière le filtre passe-haut FPH1. La composante
basse fréquence de
l'accélération ne pouvant être restituée par un déplacement de la plateforme,
la technique dite de
tilt (inclinaison de la plate forme) est utilisée pour récupérer une composante
de la gravité qui sera
perçue comme étant une accélération linéaire par le système de capteurs
d'accélérations, situé dans
l'oreille interne ; en effet, ce système, incapable dans ces conditions de
distinguer une rotation d'une
translation, est leurré. La sortie du filtre passe-bas FPB contribue ainsi à
définir l'angle d'inclinaison
de la plateforme par rapport à la verticale.
Ci-après on notera X(p) la transformée de Laplace de la grandeur x(t).
9
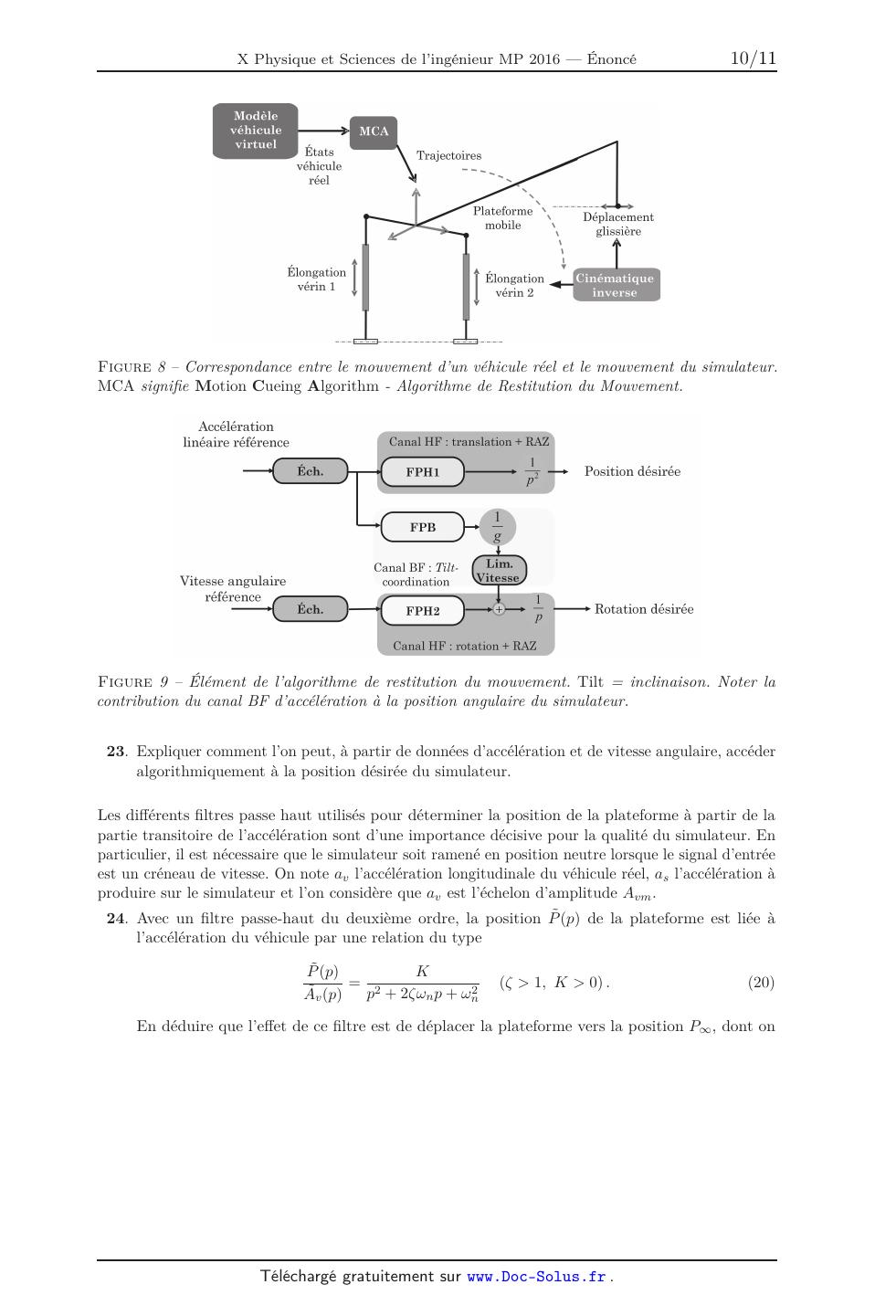
Figure 8 Correspondance entre le mouvement d'un véhicule réel et le mouvement
du simulateur.
MCA signifie Motion Cueing Algorithm - Algorithme de Restitution du Mouvement.
Figure 9 Élément de l'algorithme de restitution du mouvement. Tilt =
inclinaison. Noter la
contribution du canal BF d'accélération à la position angulaire du simulateur.
23. Expliquer comment l'on peut, à partir de données d'accélération et de
vitesse angulaire, accéder
algorithmiquement à la position désirée du simulateur.
Les différents filtres passe haut utilisés pour déterminer la position de la
plateforme à partir de la
partie transitoire de l'accélération sont d'une importance décisive pour la
qualité du simulateur. En
particulier, il est nécessaire que le simulateur soit ramené en position neutre
lorsque le signal d'entrée
est un créneau de vitesse. On note av l'accélération longitudinale du véhicule
réel, as l'accélération à
produire sur le simulateur et l'on considère que av est l'échelon d'amplitude
Avm .
24. Avec un filtre passe-haut du deuxième ordre, la position P (p) de la
plateforme est liée à
l'accélération du véhicule par une relation du type
K
P (p)
= 2
p + 2n p + n2
Av (p)
( > 1, K > 0) .
(20)
En déduire que l'effet de ce filtre est de déplacer la plateforme vers la
position P , dont on
10
donnera l'expression en fonction de K, Am et n . Conclure en expliquant
pourquoi des filtres
du premier ou du deuxième ordre sont inadaptés.
25. Soit Pm le déplacement linéaire maximal disponible sur le simulateur ;
comment choisir n ?
26. Un filtre du troisième ordre assure le retour en position neutre. On
identifie, dans sa fonction
de transfert (21), la partie Filtrage de la relation (20) et la partie Retour à
la position neutre.
F P H(s) =
As (p)
p
p2
.
·
=K 2
2
p
+
2
p
+
p
+
f
Av (p)
n
n
(21)
Comment choisir f de manière à avoir un retour rapide en position neutre ? On
pourra
s'appuyer sur une analyse de la Figure 10. Les données de déplacement dans
cette Figure
sont-elles en accord qualitatif avec vos réponses sur la course des vérins
(question 17) ?
Figure 10 Position de la plateforme (en m) en fonction du temps (en s),
lorsque l'entrée est un
échelon d'accélération, pour K = 1, = 2 et n = 1 rad · s-1 . La courbe en
pointillés correspond à
f = 0 ; pour une meilleure lisibilité, son amplitude a été divisée par 2. Par
amplitude maximale
décroissante, les courbes correspondent respectivement à f = 1, f = 2 et f = 4.
2.2.2
Vers un réglage pratique des paramètres, dans le pire des cas
Dans des conditions modérées de conduite, un filtre du deuxième ordre suffit
(c'est la situation
dite du pire cas). La réponse impulsionnelle du filtre intervenant dans la
relation (20) est considérée
représenter la position de la plate forme et c'est
h(t) =
K
[exp (p1 t) - exp (p2 t)] ,
p 1 - p2
(22)
où p1 et p2 sont les zéros du polynôme p2 + 2n p + n2 , avec p2 < p1 < 0. On posera = cosh a. del'instant T 27. Quelle est, dans l'équation (22), la dimension de K ? Déterminer l'expression K a exp - où h atteint sa valeur maximale, H. Admettant la relation H = , donner et n tanh a commenter l'allure graphique de h(t) et celle de T (a). 28. Le canal tilt de la Figure 9 est-il utile pour ce simulateur ? 11