
X Physique MP 2004
| Thème de l'épreuve | Amortisseurs: étude de quelques systèmes |
| Principaux outils utilisés | mécanique du point, induction |
| Mots clefs | amortisseurs |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)


Énoncé obtenu par reconnaissance optique des caractères
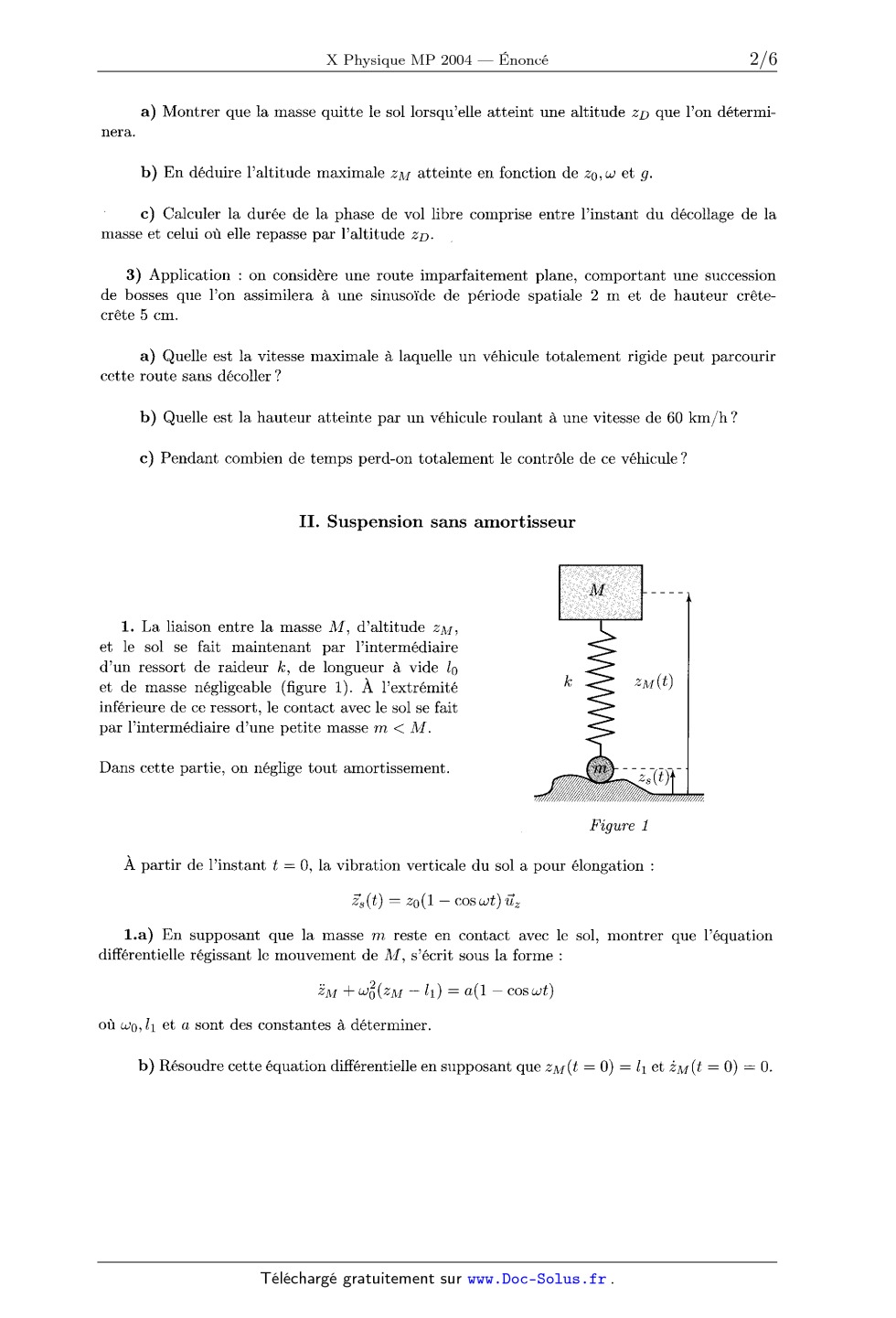
ÉCOLE POLYTECHNIQUE FILIÈRE MP CONCOURS D'ADMISSION 2004 COMPOSITION DE PHYSIQUE (Durée : 4 heures) L'utilisation des calculatrices est autorisée pour cette épreuve. *** Amortisseurs : étude de quelques systèmes Dans de nombreuses situations (automobiles, machines industrielles, constructions anti- sismiques}, on souhaite diminuer la réponse d'un système aus: vibrations mécaniques de son support. Ce problème est consacré à l'étude de quelques aspects de l'amortissement de ces vibra- tions mécaniques. Il se compose de quatre parties. La quatrième est totalement indépendante des trois autres. La seconde ne dépend de la première que pour l'application numérique finale. On note R(â) la partie réelle d'un nombre compleoee ;. Données numériques : Champ de pesanteur : g = 9, 81 ms--2 Perméabilité du vide : u0 : 47r >< 10"7 H-m"1 I. Mouvement sans suspension Dans cette partie, le système est un solide, assimilé à une masse ponctuelle M, simplement posé sur le sol, plan et horizontal. Les mouvements du sol et de la masse sont supposés purement verticaux. L'axe vertical 0 z, de vecteur unitaire à}, est orienté vers le haut. À partir de l'instant t = O, le sol est animé de vibrations verticales d'élongation : zs(t) : Zo(l -- cos cut) @ La) Écrire l'équation du mouvement de la masse M. b) Montrer qu'il existe deux régimes pour le mouvement de M , en fonction des caracté-- ristiques de la vibration. Donner la valeur a M de l'accélération as (t) du sol qui sépare les deux régimes. Préciser le mouvement de M dans le cas où las (t)] < laM) à. tout instant. 2) On suppose maintenant que l'accélération du sol peut dépasser a M en valeur absolue. &) Montrer que la masse quitte le sol lorsqu'elle atteint une altitude zD que l'on détermi-- nera. b) En déduire l'altitude maximale ZM atteinte en fonction de zo, w et g. 0) Calculer la durée de la phase de vol libre comprise entre l'instant du décollage de la masse et celui où elle repasse par l'altitude zD. 3) Application : on considère une route imparfaitement plane, comportant une succession de bosses que l'on assimilera a une sinusoïde de période spatiale 2 m et de hauteur crête-- créte 5 cm. a) Quelle est la vitesse maximale à laquelle un véhicule totalement rigide peut parcourir cette route sans décoller '? b) Quelle est la hauteur atteinte par un véhicule roulant à une vitesse de 60 km/h ? c) Pendant combien de temps perd--on totalement le contrôle de ce véhicule ? II. Suspension sans amortisseur 1. La liaison entre la masse M, d'altitude ZM, et le sol se fait maintenant par l'intermédiaire d'un ressort de raideur k, de longueur à vide lg et de masse négligeable (figure 1). À l'extrémité inférieure de ce ressort, le contact avec le sol se fait par l'intermédiaire d'une petite masse m < M. //// //////Ï"' ,, F figure 1 Dans cette partie, on néglige tout amortissement. À partir de l'instant t = 0, la vibration verticale du sol a pour élongation : zs(t) = Zo(1 ---- cos wt) 52 La) En supposant que la masse m reste en contact avec le sol, montrer que l'équation différentielle régissant le mouvement de M, s'écrit sous la forme : äM + wâ(zM ----- l1) : a(1 -- coswt) où w0,11 et a sont des constantes à déterminer. b) Résoudre cette équation différentielle en supposant que ZM (t = O) : l1 et àM(t = O) = O. c) Soient ZM ...... et ZM min respectivement les altitudes maximale et minimale atteintes par la masse M au cours du temps. Montrer que Az : ZM ...... -- ZM min se met sous la forme 2 2 ou + wo AZ : C--2--_2 |w _ w0l _ quement Az en fonct1on de w/w0. zo où 0 est un facteur numérique que l'on déterminera. Représenter schémati-- 2.a) Établir l'équation du mouvement de la masse m. b) En déduire la condition pour que la masse m ne décolle pas du sol. m c) Mettre cette condition sous la forme f (ou) < K où K = 29 (1 + --ÂÆ--), et f (ou) est une fonction de ou de la forme Acos w0t + B cos cat, A et B étant des coefficients sans dimension que l'on explicitera en fonction de w, wo, m, M. (1) Préciser la valeur maximale de f(w) a l'aide des paramètres adimensionnês X = w2/wâ et 5 = m / M . En étudiant les changements possibles de signe de A et B, expliciter son expression pour chacune des trois bandes de pulsation que l'on est amené à distinguer, séparées par les valeurs X0 et X1 (avec XO < X1) de X que l'on précisera. 3. Application numérique : On considère une route de même profil qu'en I.3 et un véhicule dont la masse suspendue vaut M = 1280 kg et la masse non suspendue m = 160 kg. &) En régime statique, le ressort se comprime de 61 = l() -- 11 = 10 cm sous l'effet de M. Calculer numériquement g / wâ puis la constante K. b) Calculer, pour chacune des trois bandes de pulsations obtenues en II.2.d, les plages de valeur de X pour lesquelles la condition f(w) < K est satisfaite. c) En déduire les plages de vitesse, exprimées en km/h, permises pour que les roues du véhicule restent en contact permanent avec le sol. 4.3) Des études montrent qu'une automobile est ressentie comme bien suspendue lorsque la fréquence propre du système est de l'ordre de 1,5 Hz. Les valeurs numériques données plus haut correspondent--elles a ce critère ? b) Que deviennent, pour le paramètre X , les plages obtenues en II.3.b, lorsque on diminue la masse non suspendue m, les autres paramètres restant inchangés; préciser en particulier les valeurs limites pour m ----> 0. Un tel allègement est-il favorable? Si oui, citer des exemples de solutions techniques qu'on peut imaginer dans ce but. III. Suspension avec amortisseur On ajoute maintenant, en parallèle avec le res-- sort de suspension, un amortisseur (figure 2) qui exerce sur la masse M une force de type visqueux donnée par F -- --vä£uz 'y k où l = ZM -- z... est la longueur instantanée du res-- sort et 7 une constante. Comme précédemment, la vibration verticale du sol a une élongation donnée à partir de t = 0 par : --» zs(t) = Z()(I ---- cos cat) @ Figure 2 La) Écrire l'équation du mouvement de la masse M, dans le cas où m reste en contact avec le sol, a l'aide de z... et à... et des constantes wo, l1 et 1/T = v/M. b) Montrer que le mouvement de M comporte un régime transitoire qui s'atténue au cours du temps. Donner une description qualitative des divers régimes que l'on peut rencontrer; les discuter selon la valeur du paramètre oz = 1/wâ7'2. c) On se place dorénavant en régime sinusoïdal forcé, c'est--à--dire que l'on suppose le régime transitoire achevé. On pose 2... = R(ä) avec z_... = ZO(1--exp iwt) et YM = zM--l1--ZO = R(Y_M) ; expliciter en notation complexe Y_M en fonction de 20, au, cm et T. (1) On s'intéresse à l'amplitude de vibration de M en fonction de w. Montrer qu'elle s'exprime, en posant X = w2/wâ, sous la forme : |_YÆ|_ 1+aX 210 _ (I--X)2+OEX Étudier qualitativement sa variation en fonction de X ; on précisera en particulier les valeurs de X pour lesquelles ce rapport vaut 1. Calculer numériquement la position et le maximum de ce rapport pour 04 = 4 et a = 1. e) En comparant l'amplitude d'oscillation de M en fonction de la fréquence au résultat obtenu en II.1.c, quelles améliorations ou inconvénients vous semble apporter l'amortissement '? 2. Avec l'amortisseur, la condition pour que, en régime sinusoïdal forcé, la masse non sus-- pendue m demeure en contact permanent avec le sol, se met sous la forme : lF(w)l < (1 + Ô)9/Zowâ (1 +fl--fiX)2 + (1 +fi)2aX où X =w2/wâ, a=1/wâT27 fl=m/M et lF(w)l =X (1 --X)2+aX a) Avec successivement les deux valeurs oz : 4 et a = 1 du paramètre d'amortissement, calculer |F(w)| pour X : X1/2,X1 et 2X1 où X1 est la valeur de X obtenue en II.2.d). b) On utilise les mêmes données numériques qu'en 11.3 et II.3.a). En comparant les valeurs de 'F(w)| aux résultats de II.3.b), qu'en concluez--vous sur l'effet bénéfique ou néfaste de l'amortissement aux fréquences élevées ? Pour ces fréquences, quel est, a votre avis, l'élément de l'ensemble non suspendu d'une automobile qui, peut améliorer la situation ? IV. Amortissement magnétique Les amortisseurs d'automobiles consistent la plupart du temps en un piston qui se déplace dans un cylindre rempli d'un fluide visqueux. Le but de cette partie est d'estimer l'efficacité d'un amortissement magnétique. 1. On considère un aimant cylindrique d'axe Oz, de rayon 7"... de longueur EUR et aimanté selon son axe. On assimilera le champ magnétique externe de cet aimant à celui d'un dipôle % : ÛÏZ'ÜÏZ dirigé selon Oz et situé en son centre. Cet aimant se déplace dans un tuyau métallique cylindrique vertical d'axe 02, de très grande longueur, de rayon intérieur R1 > ra et extérieur R2 > R1. On rappelle que le champ magnétique Ë produit au point 'F(æ, y, z) par un dipôle magnétique situé en O et aligné avec l'axe Oz est donné par l'expression : --» ...) SZÛTZF-- TZÛÏZÜZ B = ------------5---- 47r 7° Dans la suite on pourra utiliser soit un système de coordonnées sphériques (7°, 6', go) de vecteurs unitaires (à}, 119, 17590) ou cylindriques (p, go, 2) d'axe 02 de vecteurs unitaires (fc--[p, 1ÏÇP, ü},). &) Décrire qualitativement ce qui se passe lorsque l'aimant tombe dans le tuyau sous l'effet de son poids. b) Calculer le flux de ce champ dipolaire Ë a travers un contour circulaire d'axe Oz, de rayon R et d'ordonnée h si le dipôle est situé en O. c) Calculer la force électromotrice induite a l'instant t sur ce contour si l'aimant en O est animé d'une vitesse 17 : 12%. d) En déduire que le champ électrique induit dans la direction orthoradiale ü90, s'écrit : hR E@(R7 h) : KOEZW U où la est une constante à déterminer. e) En supposant que l'aimant est fixe et le tube en translation verticale à la vitesse --v, déterminer la force qui s'exerce dans le tube sur un porteur de charge q en fonction de v et de B. Comparer au résultat de la question précédente. 2. Soit 0 la conductivité du métal du tuyau. On suppose que la loi d'Ohm locale est vérifiée. &) Quelle est par unité de volume, en fonction de Eoe et a, la puissance dissipée par effet Joule. b) Calculer la puissance totale dissipée en fonction de DTC, 0, R1, R2 et @. On donne : /+oe 5132 57r 1 --------------doe : _-- _OO (362 + a2)5 128 a7 c) En déduire la force magnétique qu'exercent ces courants induits sur l'aimant. A-t-elle l'allure d'une force de frottement visqueux de la forme --7v ? 3.a) Exprimer la vitesse limite d'un aimant, de masse volumique pa et de volume V, supposé en chute verticale. b) Application numérique. On considère un tuyau en cuivre, de conductivité a = 5, 8 >< 107 S-m"', d'épaisseur notable avec R2 = 1, 5 R1 ; l'aimant a un rayon ra voisin de R1, une longueur double de son rayon et une masse volumique pa : 7, 4 >< 103 kg-m_3. Son aimantation (moment magnétique par unité de volume) M A est supposée uniforme et vaut 106 A-m". Calculer la vitesse limite de chute. 4. Quel doit être l'ordre de grandeur du volume de l'aimant pour obtenir un temps d'amor-- tissement T (cf. III.1.a) de 0,1s avec M = 1280 kg. On prendra comme dans l'application numérique précédente un cylindre avec ra % R1 et un tube avec R2 = 1, 5R1 ? Commenter la faisabilité d'un amortisseur de ce type pour une automobile.