
Mines Physique 2 MP 2001
| Thème de l'épreuve | Autour de la notion de secousse... |
| Principaux outils utilisés | mécanique, lois de Coulomb |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)



Rapport du jury
(télécharger le PDF)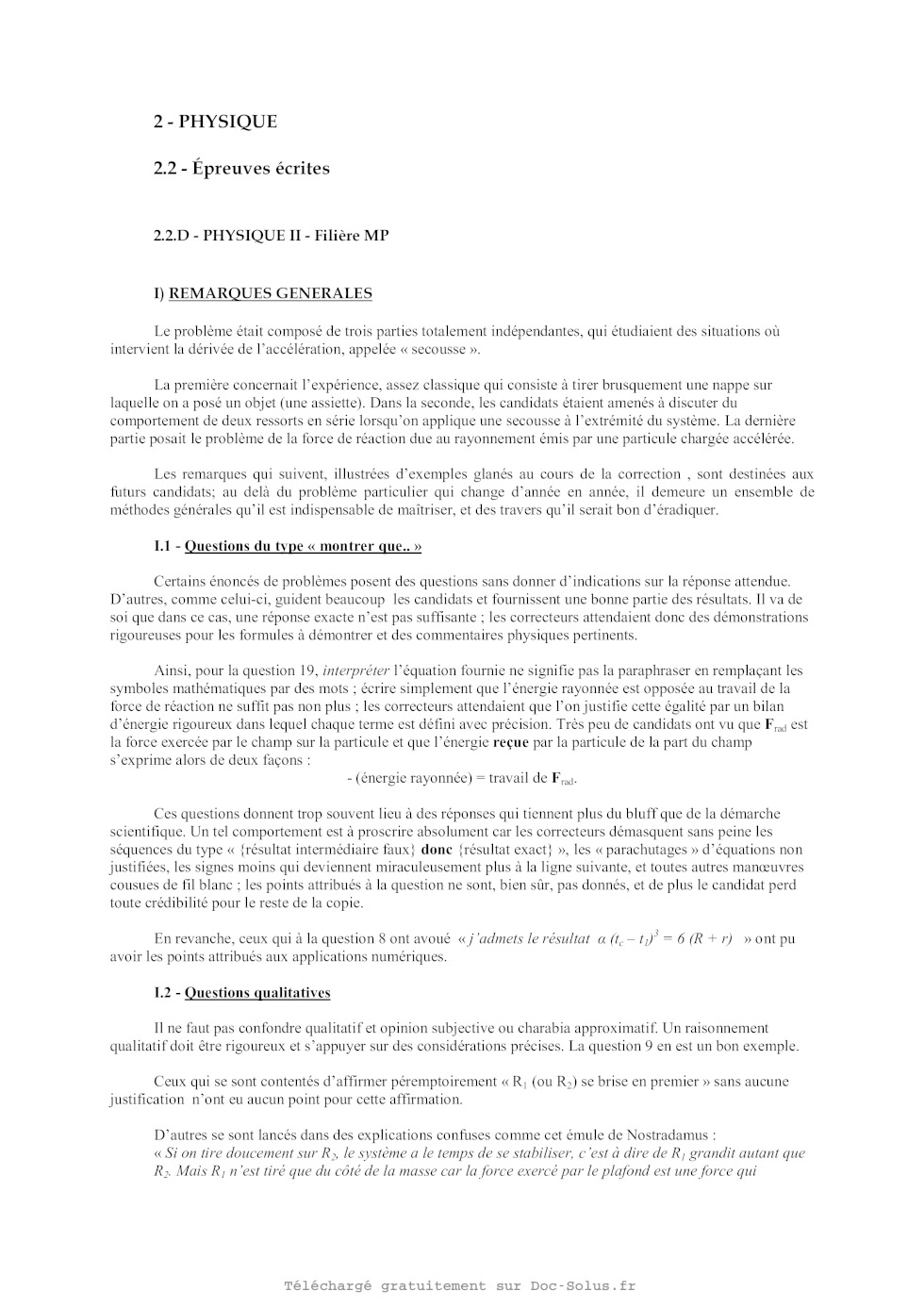


Énoncé obtenu par reconnaissance optique des caractères
A 2001 PHYS. MP 2
' ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES,
ECOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE,
DE TECHNIQUES AVANCÉES, DES TELECOMMUNICATIONS,
DES MINES DE PARIS, DES MINES DE SAINT--ETIENNE, DES MINES DE NANCY,
DES TÉLÉCOMMUNICATIONS DE BRETAGNE,
ÉCOLE POLYTECHNIQUE (FILIÈRE TSI)
CONCOURS D'ADMISSION 2001
SECONDE ÉPREUVE DE PHYSIQUE
Filière N[P
(Durée de l'épreuve : 3 heures ; l'emploi de la calculatrice est autorisé)
Sujet mis à disposition des concours : Cycle international, EN STIM, [NT,
TPE-EIVP
Les candidats sont priés de mentionner de façon apparente sur la première page
de la copie :
Physique 11 ---- Filière MP '
Cet énoncé comporte 6 pages de texte.
0 Si, au cours de l'épreuve, un candidat repère ce qui lui semble être une
erreur d'énoncé, il le signale sur
sa copie et poursuit sa composition en expliquant les raisons des initiatives
qu'il est amené à prendre.
0 Tout résultat fourni dans l'énoncé peut être utilisé.
. Conventions typographiques : un vecteur est noté en gras (A), sa norme en
italique (" A " = A).
0 Il ne faudra pas hésiter à formuler tout commentaire qui vous semblera
pertinent, même lorsque
l'énoncé ne le demande pas explicitement. Le barème tiendra compte de ces
initiatives ainsi que des qualités de
rédaction de la copie.
SECOUSSES
L'épreuve est constituée de deux parties indépendantes l'une de l'autre et que
l'on pourra traiter dans l'ordre que
l'on voudra. Chacune de ces parties fait intervenir la notion, peu courante en
mécanique newtonienne, de
da
secousse : on nomme ainsi une quantité (1 égale à la dérivée temporelle d'une
accélération a : ou = ---
dt
Première partie : SECOUSSES EN MÉCANIQUE
Cette partie présente deux expériences « à une dimension » et indépendantes
l'une de l'autre.
Première expérience
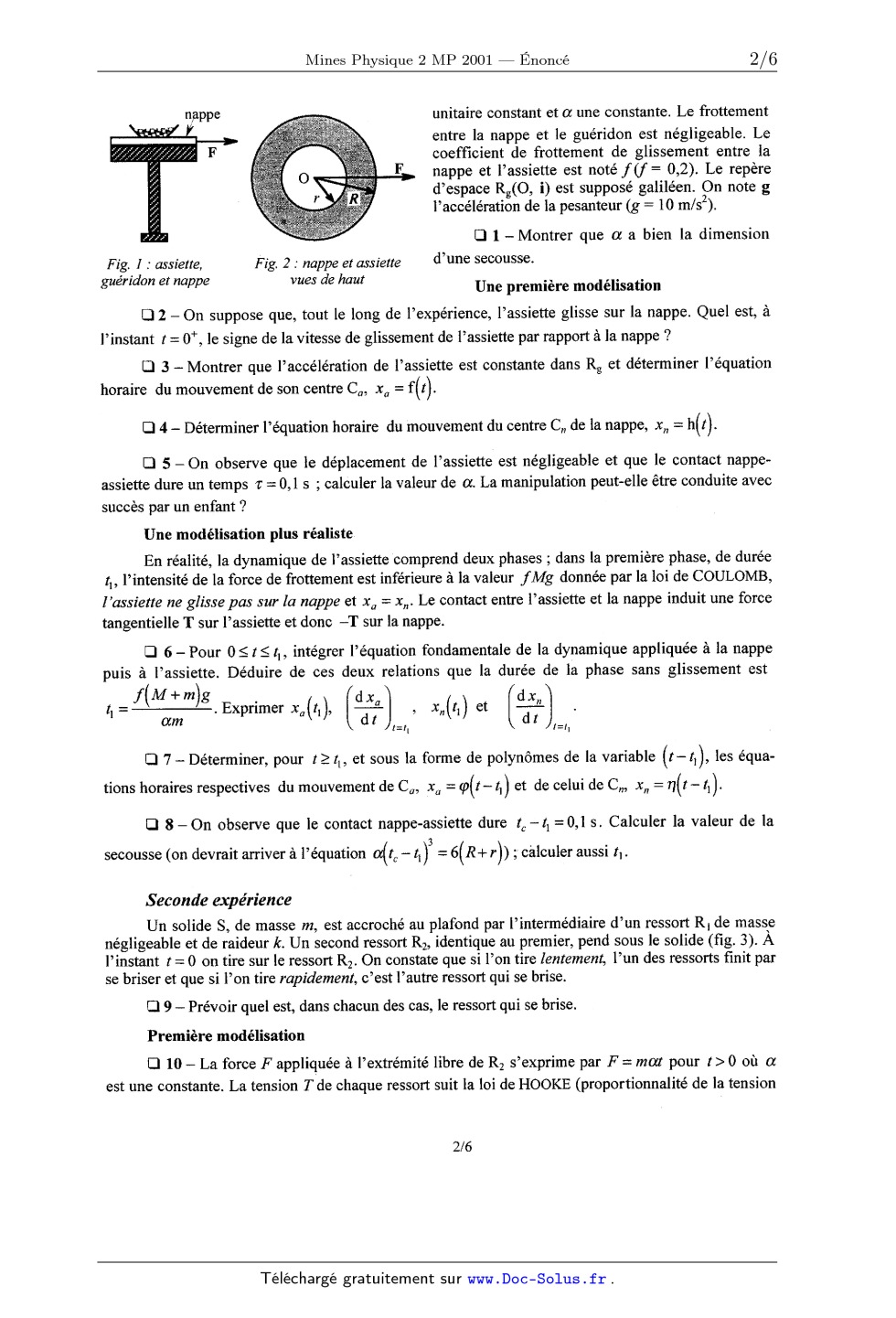
Sur le guéridon de la figure ], recouvert d'une nappe sans ourlet, on place une
assiette bien
remplie. D'un geste brusque, on tire la nappe. L'assiette reste en place sur le
guéridon.
La masse de l'assiette est M = 400 g, celle de la nappe est m = 50 g. Le
guéridon (fig. 2) est modé--
lisé par un disque de centre O et de rayon R = 25 cm. Il est recouvert d'une
nappe de même dimen-
sion et d'épaisseur négligeable. L'assiette circulaire, de rayon r = 5 cm, est
placée au centre de la
nappe. On admet que le support de la force F développée par l'expérimentateur
pendant qu'il tire sur
la nappe passe par O et que cette force s'écrit, en fonction du temps !, F :
mali, Où i est un vecteur
% Tournez la page S._V.P.
unitaire COHSÏ&ÏIÏ Gt & une COHSÏ8ÏIÏEUR. Le fl"OtÏEURlÏlEURflt
entre la nappe et le guéridon est négligeable. Le
coefficient de frottement de glissement entre la
nappe et l'assiette est noté f (f = 0,2). Le repère
d'espace Rg(O, i) est supposé galiléen. On note g
l'accélération de la pesanteur (g = 10 m/sz).
-ç._-._-ç. . .
.-.--. .'
.
3::-:--è:æ::---:ù.-... -
Cl 1 -- Montrer que a a bien la dimension
Fig. 1 : assiette, Fig. 2 : nappe et assiette d'une SEURCOUSSEUR--
ue'ridon et na e vues de haut . . , . .
g pp Une premiere modélisation
D 2 ---- On suppose que, tout le long de l'expérience, l'assiette glisse sur la
nappe. Quel est, à
l'instant t : OJ", le signe de la vitesse de glissement de l'assiette par
rapport à la nappe '?
D 3 ---- Montrer que l'accélération de l'assiette est constante dans Rg et
déterminer l'équation
horaire du mouvement de son centre C,, xa : f (t)
E! 4 -- Déterminer l'équation horaire du mouvement du centre C,, de la nappe,
x,, : h(t).
D 5 -- On observe que le déplacement de l'assiette est négligeable et que le
contact nappe-
assiette dure un temps T = 0,1 s ; calculer la valeur de a. La manipulation
peut-elle être conduite avec
succès par un enfant ?
Une modélisation plus réaliste
En réalité, la dynamique de l'assiette Comprend deux phases ; dans la première
phase, de durée
tl, l'intensité de la force de frottement est inférieure à la valeur f Mg
donnée par la loi de COULOMB,
l'assiette ne glisse pas sur la nappe et xa : x,,. Le contact entre l'assiette
et la nappe induit une force
tangentielle T sur l'assiette et donc --T sur la nappe.
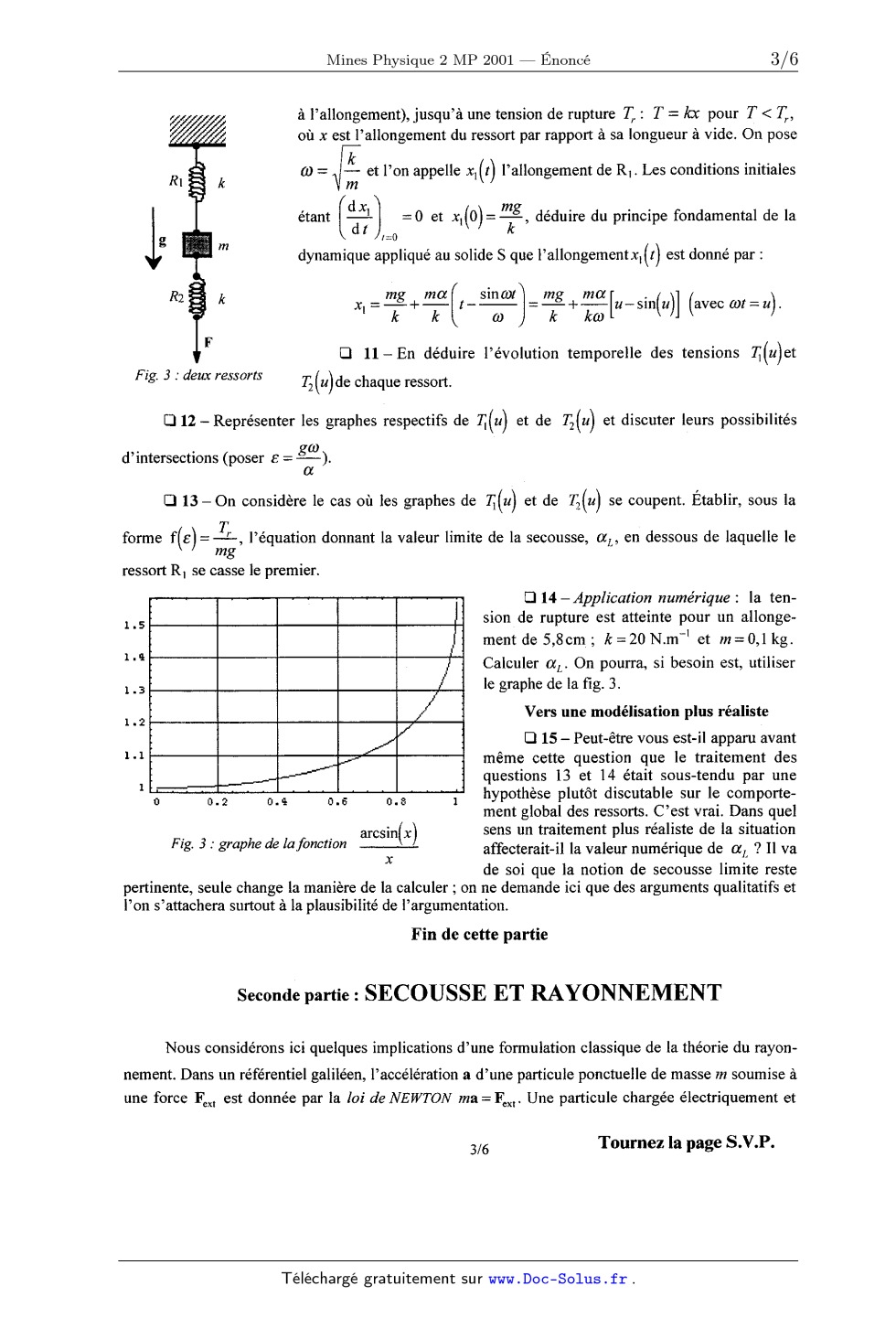
Cl 6 -- Pour 0 _<. t5 t1 , intégrer l'équation fondamentale de la dynamique appliquée à la nappe puis à l'assiette. Déduire de ces deux relations que la durée de la phase sans glissement est M tl : W _ Exprimer xa(t1 ), t=t1, xn(ïl) et ddxtn t=tl dxa dt Cl 7 --- Déterminer, pour tZ tl, et sous la forme de polynômes de la variable (t-- tl), les équa-- tions horaires respectives du mouvement de C,, _xa : (p(t ---- tl) et de celui de C... x,, = n(t --- tl). D 8 -- On observe que le contact nappe-assiette dure tc ---t1 : 0,1 3. Calculer la valeur de la secousse (on devra1t amver a l'equat1on a(tc --- tl) : 6(R + r)) ;" calculer auss1 tl. Seconde expérience Un solide S, de masse m, est accroché au plafond par l'intermédiaire d'un ressort R, de masse négligeable et de raideur k. Un second ressort R2, identique au premier, pend sous le solide (fig. 3). À l'instant t = 0 on tire sur le ressort R2. On constate que si l'on tire lentement, l'un des ressorts finit par se briser et que si l'on tire rapidement, c'est l'autre ressort qui se brise. Cl 9 -- Prévoir quel est, dans chacun des cas, le ressort qui se brise. Première modélisation D 10 --- La force F appliquée à l'extrémité libre de R2 s'exprime par F : mat pour t > 0 où a
est une constante. La tension T de chaque ressort suit la loi de HOOKE
(proportionnalité de la tension
2/6
à l'allongement), jusqu'à une tension de rupture T. : T = kx pour T < T,, ] où x est l'allongement du ressort par rapport à sa longueur à vide. On pose / k . . . . . w = ------ et l'on appelle xl(t) l'allongement de R]. Les cond1t10ns initiales m ÎÏ k dynamique appliqué au solide S que l'allongement xl(t) est donné par : étant (da) : 0 et x1 (0) : ---n3--g--, déduire du principe fondamental de la r=0 x1 =--ñ]î--g--+Ækg(t-- SiZOEt]=ËËË+%[u--sin(u)] (avec ca!: u). Ü 11--En déduire l'évolution temporelle des tensions î}(u)et Fig-- 3 -' deux ressorts T2(u) de chaque ressort. D 12 -- Représenter les graphes respectifs de î](u) et de T2(u) et discuter leurs possibilités . . &) d'mtersectmns (poser 8 = --g------ . a E] 13 ---- On considère le cas où les graphes de ]](u) et de Tz(u) se coupent. Établir, sous la T , . . . ' forme f 8 = " , l'e uat10n donnant la valeur hm1te de la secousse, a , en dessous de la nelle le q L q mg ressort R1 se casse le premier. D 14 --Applicatîon numérique : la ten- sion de rupture est atteinte pour un allonge-- ment de 5,8cm; k=20 N.m"l et m=0,1 kg. Calculer a,]. On pourra, si besoin est, utiliser le graphe de la fig. 3. Vers une modélisation plus réaliste D 15 -- Peut--être vous est--il apparu avant même cette question que le traitement des questions 13 et 14 était sous--tendu par une hypothèse plutôt discutable sur le comporte- ment global des ressorts. C'est vrai. Dans quel arcsin(x) sens un traitement plus réaliste de la situation affecterait-il la valeur numérique de % '? Il va de soi que la notion de secousse limite reste pertinente, seule change la manière de la calculer ; on ne demande ici que des arguments qualitatifs et l'on s'attachera surtout à la plausibilité de l'argumentation. Fig. 3 : graphe de la fonction x Fin de cette partie Seconde partie: SECOUSSE ET RAYONNEMENT Nous considérons ici quelques implications d'une formulation classique de la théorie du rayon-- nement. Dans un référentiel galiléen, l'accélération a d'une particule ponctuelle de masse m soumise à est donnée par la loi de NEWTON ma= F - une force F ex, . ... Une particule chargée électriquement et 3/6 Tournez la page S.V.P. accélérée rayonne un champ électromagnétique. L'ensemble particule-rayonnement étant considéré comme un système isolé, la détermination de la trajectoire doit prendre en compte l'existence de ce rayonnement : le champ rayonné, en effet, véhicule un certain nombre de grandeurs dynamiques, en particulier de l'énergie. Ordres de grandeur (modèle scalaire, pas de vecteurs, à ce niveau de description) Dans un champ de force extérieur Fax,, une particule de charge q acquiert dans le temps T une accélération a. Un théorème dû à LARMOR stipule alors que, en moyenne dans le temps, l'énergie 2 2T totale rayonnée en champ lointain s'exprime par Ead z ---- q 3 47t£0 c 3 a2(t) (les symboles ont ici leur sens usuel et la barre de dessus signifie la moyenne temporelle). Si cette perte d'énergie est petite devant une énergie caractéristique du problème, an les effets radiatifs sont négligeables. On détermine ici des 1 47%:() =9><109 m.F_1 et c=3><108 m.s". conditions sous lesquelles Erad z EO. On prendra D 16 -- La particule, initialement au repos, soumise à une force extérieure dans l'intervalle fini de temps T, acquiert une vitesse de l'ordre de aT . L'énergie caractéristique du problème est 2 l q23 - E0 : m(aT)2. Montrer que les effets radiatifs sont significatifs dès que l'on a Tz "L'" --- Cl 17 ---- Calculer, pour m = 0,9 >< 10"30 kg et q = 1,6 >< 10"19 C , la valeur numérique de T. Quelle distance la lumière parcourt--elle dans le temps "L' '? Cl 18 --- Le mouvement de la particule est circulaire et quasi périodique, de rayon d et de fréquence angulaire ab. En ordre de grandeur, EO est peu différent de moe0 2a'2. Donner les expressions typiques de l'accélération a et de T en fonction de (00 et de d , retrouver le critère T == T (en réalité, ce calcul peut donner aussi bien T z 475%", selon le choix des approximations). Vers l'établissement d'une forme plausible de la force de réaction L'équation du mouvement de la particule sera écrite conventionnellement sous la forme newto- nienne ; soit v sa vitesse1 : m%--É=cht+E,. 111 Pour établir l'expression de la force de réaction F ad qui affecte le mouvement, on admet que la 2 . , . . 2 61 a (! ) puissance rayonnee a chaque 1nstant est P(t) = -- 3 . 3 475900 241"a() ...dt, que 3 47t£063 Cl 19 --- Soient deux instants t1 et t_,_ ; interpréter l'équation IZrFad. vd t-- -- --Î--- tl '1 1 . , . , . En toute r1gueur, le vecteur v est la veloczte. La vztesse v est la norme de v. 4/6 nous allons utiliser désormais. D 20 -- Intégrer par parties le membre de droite de l'équation de la question 19. On obtient une da équation faisant apparaître l'accélération a et la secousse --C-l--. ! D 21 ---- Admettant l'hypothèse de SCHOTT : a(t1 ).v(tl) : a(t2).v(t2), montrer qu'une expression plausible de la force de réaction, utilisant la constante ? de la question 16 est (formule d'ABRAHAM- LORENTZ) : 2 q Êî=mËÎ'--. [2] 47r£Oc3 dt dt ra 2 F:-- d3 La mécanique newtonienne en danger ? Il résulte de [l] et de [2] que l'équation du mouvement de la particule chargée est dt m(a --- "cg--î] : Fext. [3] _ Cl 22 -- Retrouve--t-on l'équation de NEWTON pour une particule non chargée ? Cl 23 -- La force extérieure est nulle. À l'instant initial, l'accélération de la particule est a(0) # 0. Quelle est l'accélération au temps t '? Ce. résultat est--il conforme à l'hypothèse de SCHOTT '? Résolution de l'équation [3] ;_conséquences curieuses D 24 --- lntroduisant la fonction vectorielle A(t) définie par a(t)= A(t)exp(£), établir la T solution de [3] sous la forme ma(t) : --î_--J 0 Fext (u) exp[--£î--£]du. [4] ! où la détermination de la borne d'intégration to est provisoirement laissée en suspens. D 25 -- Expliquer pourquoi il est numériquement légitime d'accepter pour [4] la forme, dite équation de DIM C-PLASS : 00 ma(t) : Jo Fext ([ + Tu) exp(--u) du. [5] La forme [5] recèle des difficultés ; l'une d'entre elles est que l'accélération au temps [ n'est pas liée à la force extérieure F (I) au seul temps t (comme l'exigerait la loi de NEWTON), mais à la valeur de ext cette forcéaux instants postérieurs à. t. E! 26 -- On suppose ici que la force extérieure est appliquée à partir de l'instant initial et qu'elle est constante au-delà. Montrer que la particule acquiert une accélération avant même l'instant d'application de la force tel est le paradoxe de la préaccélération. Tournez la page S.V.P. 5/6 Vers une restauration de la causalité ? Cl 27 ---- Exprimer à partir de [4] l'expression de l'accélération initiale a(0) . t E] 28 ---- Exprimer a(t) en fonction de a(0) et deJ Fext(u) exp(-- %] du. Vérifier que cette écri- 0 ture n'est pas incompatible avec la contrainte lim a(t) : 0. I----)°° Cl 29 -- La loi de NEWTON ma : Fext entraîne m[v(t) -- v(0)] : io, Fext(u) du. Montrer que si l'on impose la contrainte lim v(t) : 0, alors une forme de la loi de NEWT ON est mv(t) : --JÎ Fext (u) du. [6] Cl 30 -- Selon la relation [6], la vitesse au temps ! semble déterminée par la donnée de la force extérieure aux instants postérieurs à t. Qu'en pensez--vous ? E] 31 -- On admet que la force extérieure jouit de toutes les propriétés requises de dérivabilité et que, à l'échelle de t', ses variations temporelles sont suffisamment lentes. Dès lors, son développement en série de TAYLOR, par rapport à la variable Tu dans un voisinage de t converge assez rapidement. 00 Sous ces hypothèses, et sachant que J u" exp(--u)du : nl, argumenter, à partir de la relation [5], que 0 l'on puisse admettre l'équation ma(ï) : îTn % . [7] CI 32 -- Dans cette question et dans la suivante, la force extérieure est uniforme dans l'espace et 0 t < 0 elle ne dépend pas explicitement'du temps : F(t) ={ . Quel est alors le problème posé par FO t > 0
l'équation [7] ? Cette difficulté n'est pas insurmontable ; on peut se
rassurer, par exemple en intégrant
[7] entre ---8 et +8 et en faisant tendre 8 vers 0. Le résultat de ce calcul
est une relation, à trouver,
entre AP , variation brusque de quantité de mouvement en t= 0 , T et F0.
Cl 33 ---- Pour élucider le lien entre la relation trouvée à la question 32
etles relations non causa--
t
. . F ---- t < 0 les qui la précèdent, revenons à la question 25. Montrer que ma(t) = 0 exp( r) . Calculer alors FO t>O
la quantité de mouvement accumulée pendant la phase de préaccélération,
c'est--à--dire avant l'instant
d'application de la force extérieure.
Fin de cette partie
FIN DE L'ÉPREUVE
6/6