
CCINP Physique 1 MP 2001
| Thème de l'épreuve | Exemple simple de servomécanisme à bifurcation mécanique. Influence du rayonnement et de la gravitation dans l'étude d'un gaz parfait. |
| Principaux outils utilisés | mécanique du point, mécanique du solide, thermodynamique |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)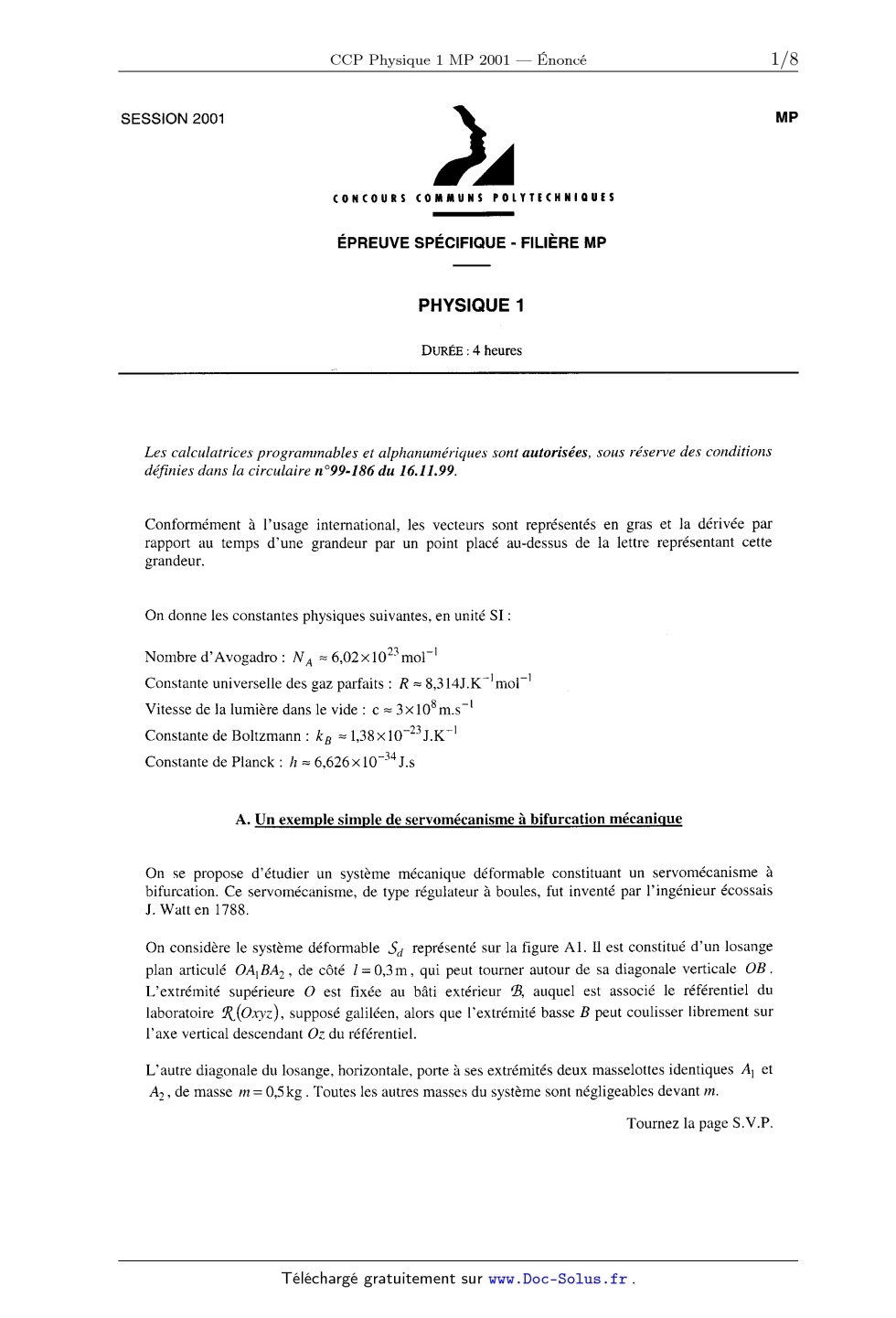


Énoncé obtenu par reconnaissance optique des caractères
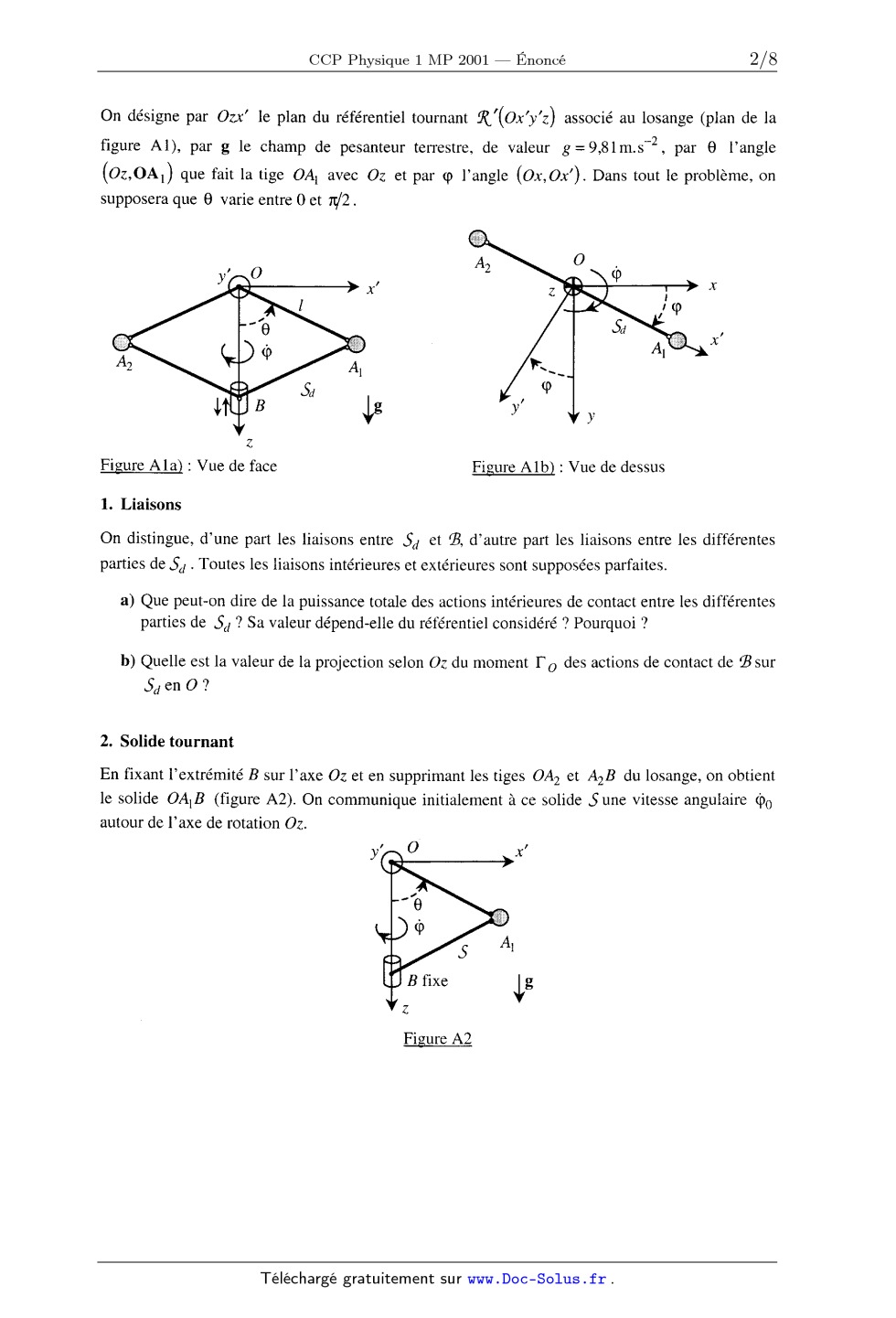
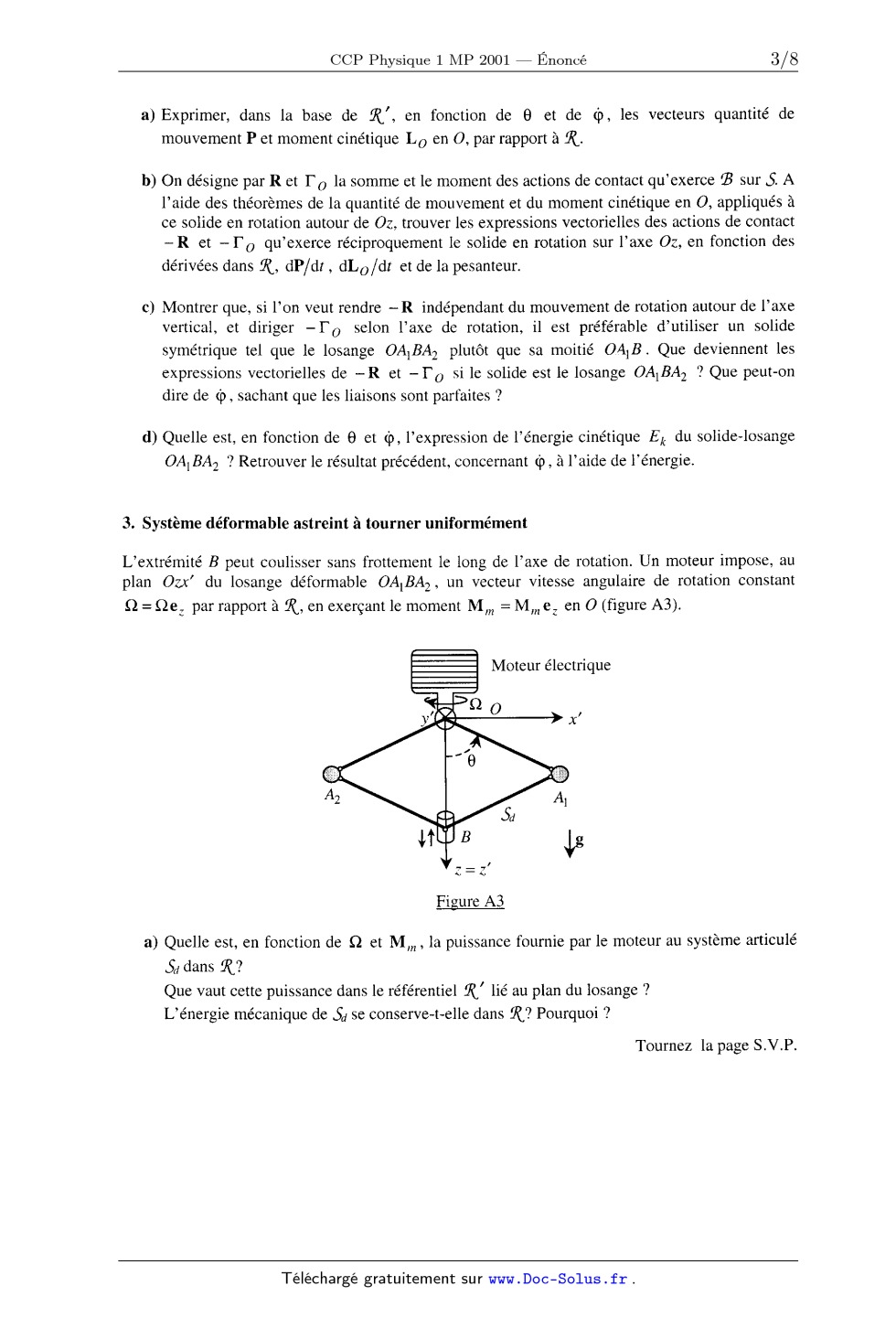
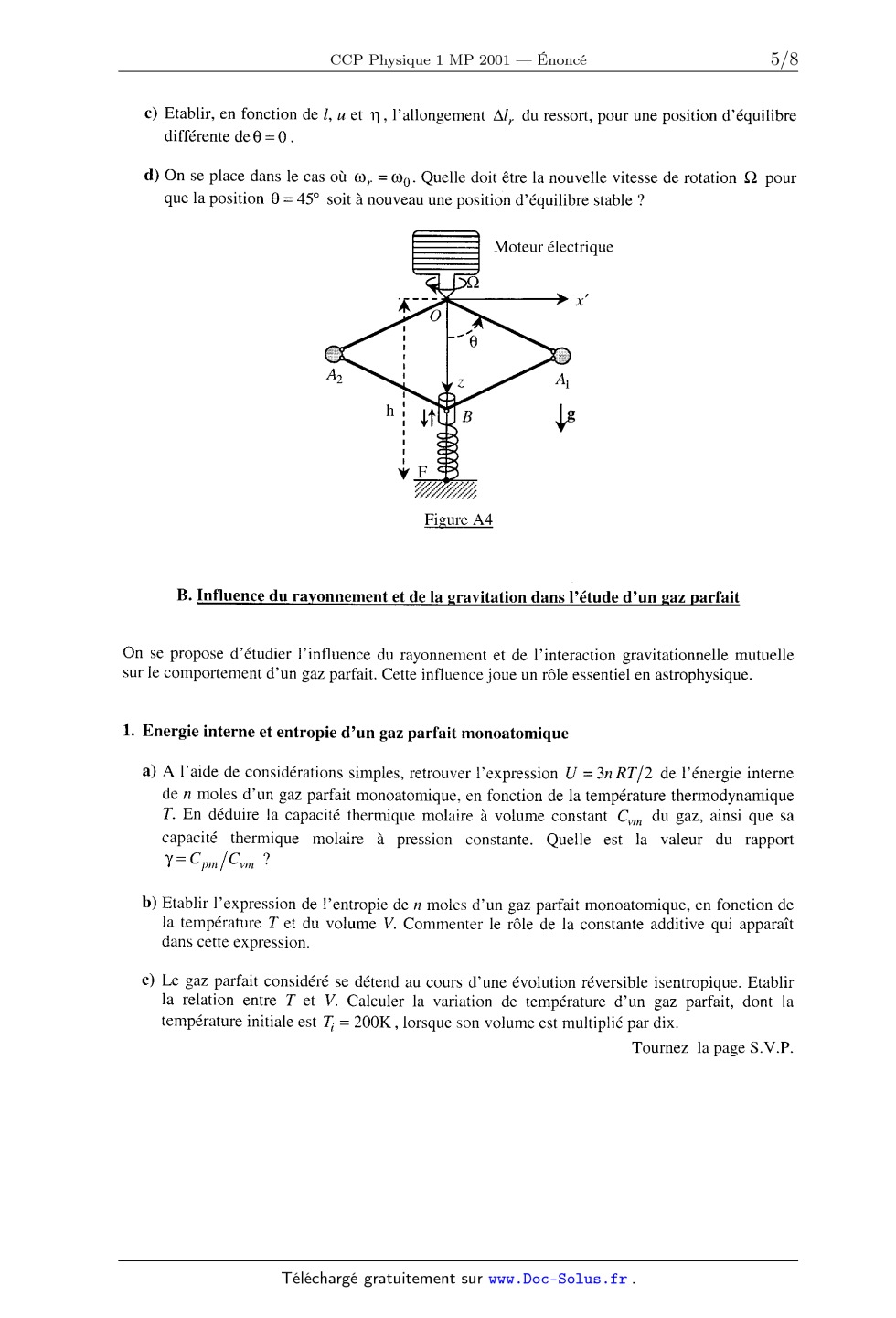
SESSION 2001 MPOO5 A CONCOURS (0MMUNS POLYÏE(HNIOUES ÉPREUVE SPÉCIFIQUE - FILIÈRE MP PHYSIQUE 1 DURÉE : 4 heures Les calculatrices programmables et alphanumériques sont autorisées, sous réserve des conditions définies dans la circulaire n°99-186 du 16.11.99. Conformément à l'usage international, les vecteurs sont représentés en gras et la dérivée par rapport au temps d'une grandeur par un point placé au-dessus de la lettre représentant cette grandeur. On donne les constantes physiques suivantes, en unité SI : Nombre d'Avogadro : NA : 6,02><1023mor1 Constante universelle des gaz parfaits : R : 8,314].K"'mol"1 Vitesse de la lumière dans le vide : c : 3><108 m.s'1 Constante de Boltzmann : kB : 1,38X10_23J.K_1 Constante de Planck : h z 6,626X10"34J.s A. Un exemple simple de servomécanisme à bifurcation mécanique \ On se propose d'étudier un système mécanique déformable constituant un servomécanisme a bifurcation. Ce servomécanisme, de type régulateur à boules, fut inventé par l'ingénieur écossais J. Watt en 1788. On considère le système déformable 5d représenté sur la figure Al. Il est constitué d'un losange plan articulé OAIBA2, de côté 1: 0,3m, qui peut tourner autour de sa diagonale verticale OB. L'extrémité supérieure 0 est fixée au bâti extérieur @, auquel est associé le référentiel du laboratoire K(Oxyz), supposé galiléen, alors que l'extrémité basse B peut coulisser librement sur l'axe vertical descendant Oz du référentiel. L'autre diagonale du losange, horizontale, porte à ses extrémités deux masselottes identiques A1 et A2, de masse rn : 0,5 kg . Toutes les autres masses du système sont négligeables devant m. Tournez la page S.V.P. On désigne par Ozx' le plan du référentiel tournant £R_'(Ox'y'z) associé au losange (plan de la figure Al), par g le champ de pesanteur terrestre, de valeur g=9,81m.s"2, par 9 l'angle (Oz,OA1) que fait la tige OAI avec Oz et par (p l'angle (Ox,Ox'). Dans tout le problème, on supposera que 9 varie entre 0 et 1r/2 . Figure Ala} : Vue de face Figure Albz : Vue de dessus 1. Liaisons On distingue, d'une part les liaisons entre 5d et @, d'autre part les liaisons entre les différentes parties de 5d . Toutes les liaisons intérieures et extérieures sont supposées parfaites. a) Que peut--on dire de la puissance totale des actions intérieures de contact entre les différentes parties de Sd ? Sa valeur dépend-elle du référentiel considéré ? Pourquoi ? b) Quelle est la valeur de la projection selon Oz du moment FO des actions de contact de $ sur Sd GI] 0 ? 2. Solide tournant En fixant l'extrémité B sur l'axe Oz et en supprimant les tiges OA2 et A28 du losange, on obtient le solide OAl,B (figure A2). On communique initialement à ce solide 5 une vitesse angulaire (po autour de l'axe de rotation Oz. Figure A2 a) Exprimer, dans la base de R', en fonction de 9 et de (i), les vecteurs quantité de mouvement P et moment cinétique La en 0, par rapport a R. b) On désigne par R et F0 la somme et le moment des actions de contact qu'exerce @ sur 5. A l'aide des théorèmes de la quantité de mouvement et du moment cinétique en O, appliqués à ce solide en rotation autour de Oz, trouver les expressions vectorielles des actions de contact --R et ---- 1"O qu'exerce réciproquement le solide en rotation sur l'axe Oz, en fonction des dérivées dans R, dP/dt, dLO/dt et de la pesanteur. c) Montrer que, si l'on veut rendre ---- R indépendant du mouvement de rotation autour de l'axe vertical, et diriger --FO selon l'axe de rotation, il est préférable d'utiliser un solide symétrique tel que le losange OAlBA2 plutôt que sa moitié OAlB. Que deviennent les expressions vectorielles de --R et -- FO si le solide est le losange OAIBA2 ? Que peut-on dire de (p, sachant que les liaisons sont parfaites ? (1) Quelle est, en fonction de 9 et (p, l'expression de l'énergie cinétique E k du solide--losange OAIBA2 ? Retrouver le résultat précédent, concernant (p, a l'aide de l'énergie. 3. Système déformable astreint à tourner uniformément L'extrémité B peut coulisser sans frottement le long de l'axe de rotation. Un moteur impose, au plan Ozx' du losange déformable OAIBA2, un vecteur vitesse angulaire de rotation constant Q : QeZ par rapport à K, en exerçant le moment M... : Mm eZ en 0 (figure A3). Moteur électrique Figure A3 a) Quelle est, en fonction de Q et M la puissance fournie par le moteur au système articulé 5}; dans K? Que vaut cette puissance dans le référentiel R' lié au plan du losange ? HI ' L'énergie mécanique de Sd se conserve--t-elle dans R? Pourquoi ? Tournez la page S.V.P. . . , . . , . , , , . / b) Etablir l'expressron de l'energ1e crnetrque E k de &, par rapport au referentrel tournant K , en fonction de 9 . c) Trouver l'expression de l'énergie potentielle de pesanteur E p, du système, en fonction de 6 . On prendra l'origine de cette énergie en 9 = n / 2 . 8 (1) Montrer que, dans le référentiel R'tournant à la vitesse angulaire constante Q, on doit tenir compte d'une énergie potentielle supplémentaire, d'expression : E;,,c : --ocm12£22sin2 9, si son origine est prise en 9 = 0, OL étant un facteur numérique que l'on déterminera. Quelle est la nature physique de cette énergie potentielle ? e) L'énergie potentielle totale E}, dans R' peut se mettre sous la forme : "2 E;, : EO --cos9-- Îsin2 9 E0 et u étant deux quantités positives que l'on exprimera en fonction de m, g, [, Q et 000 = (g /l )1/2. Calculer E0 et (no en précisant leurs unités SI. 4. Positions d'équilibre du système astreint à tourner uniformément 3) Quelles sont les positions d'équilibre de Sd dans R', en rotation uniforme à la vitesse angulaire Q '? Représenter, dans les trois cas, u << 1, u >> 1 et u : \/î , le graphe de f(9)=E;,/EQ pour OS BSR/2. b) Etudier la stabilité des positions d'équilibre. Représenter l'allure du graphe donnant la variation de la position d'équilibre stable Ge de Sd en fonction de u. On veut que la position d'équilibre stable soit Ge =45°. Quelle est, en tour par minute, la vitesse de rotation Q correspondante ? Application numérique. 5. Influence d'un ressort vertical Entre le point inférieur B du losange articulé et un point fixe F situé sur l'axe de rotation Oz, à une distance h de 0, on place un ressort, de raideur K et de longueur à vide 10 (Figure A4). On règle la position de F de telle sorte que h : lo + 21 . 2 . a) On introduit la quantité (1), = (K / rn)"2 et 112 : 2(oe, /oe0) . Quelles sont, en fonction de 9, les expressions de l'énergie potentielle élastique introduite par le ressort et de l'énergie potentielle totale du système ? b) Trouver, en fonction de u et 11, les nouvelles positions d'équilibre du système lorsque le moteur impose la vitesse de rotation constante Q . Etudier leur stabilité. c) Etablir, en fonction de l, u et 11 , l'allongement Alr du ressort, pour une position d'équilibre différente de 6 = 0 . (1) On se place dans le cas où oer : (DO. Quelle doit être la nouvelle vitesse de rotation Q pour que la position 9 : 45° soit à nouveau une position d'équilibre stable ? Moteur électrique B. Influence du ra onnement et de la ravitation dans l'étude d'un az arfait On se propose d'étudier l'influence du rayonnement et de l'interaction gravitationnelle mutuelle sur le comportement d'un gaz parfait. Cette influence joue un rôle essentiel en astrophysique. 1. Energie interne et entropie d'un gaz parfait monoatomique a) A l'aide de considérations simples, retrouver l'expression U : 3n RT/ 2 de l'énergie interne de n moles d'un gaz parfait monoatomique, en fonction de la température thermodynamique T. En déduire la capacité thermique molaire à volume constant CV... du gaz, ainsi que sa capacité thermique molaire a pression constante. Quelle est la valeur du rapport Y= Cpm/Cvm ? b) Etablir l'expression de l'entropie de n moles d'un gaz parfait monoatomique, en fonction de la température T et du volume V. Commenter le rôle de la constante additive qui apparaît dans cette expression. 0) Le gaz parfait considéré se détend au cours d'une évolution réversible isentropique. Etablir la relation entre T et V. Calculer la variation de température d'un gaz parfait, dont la température initiale est Ti : 200K , lorsque son volume est multiplié par dix. Tournez la page S.V.P. d) Le gaz reçoit de la chaleur d'une seule source extérieure, de telle sorte que son évolution soit réversible. Cette évolution est donc isotherme, à la température T de la source. Effectuer un bilan énergétique et un bilan entropique pour une mole d'un gaz parfait monoatomique subissant, à la température T=3OOK, une détente, au cours de laquelle son volume est multiplié par dix. On constate que le gaz fournit du travail alors qu'il est en relation avec une seule source. Un tel résultat n'est pas en contradiction avec l'énoncé de Lord Kelv1n du deuxième principe de la thermodynamique. Pourquoi '? e) On considère un système isolé 5, constitué de deux compartiments 51 et 52, remplis d'argon, séparés par une cloison diatherme, rigide et fixe ; initialement, les compartiments, de même volume, contenaient chacun une mole de gaz à des températures différentes. On admet que l'énergie interne et l'entropie de 5 se mettent sous la forme de sommes des énergies internes et des entropies des deux parties. Rappeler l'expression générale reliant les différentielles de l'entropie, de l'énergie interne et du volume, pour un système thermodynamique. Montrer, en appliquant les deux premiers princ1pes de la thermodynamique, que la variation élémentaire d'entropie dS du système 5 a pour expression: _ _1____1_ ds_C(Tl T2 )dU1 dU ] étant la variation d'énergie interne de 51, T1 et T2 les températures respectives de 51 et 52 ; C est un facteur que l'on déterminera. En déduire le sens des échanges thermiques et la condition d'équilibre thermique. Le système est stable si la dérivée seconde de S par rapport à U 1 est négative à l'équilibre thermique. Exprimer, en fonction de la capacité thermique molaire à volume constant C... de l'argon, la dérivée seconde de S par rapport à U 1 à l'équilibre thermique. En déduire la condition à laquelle doit satisfaire C... pour que le système soit stable. 2. Thermodynamique du rayonnement Au rayonnement émis par un corps noir, dont l'énergie électromagnétique volumique totale est w, correspond un gaz de photons dont la pression de radiation est : w pï'_3 a) On établit la relation générale suivante entre énergie interne U et pression p : (fi) =T.a£_ ...--p BV T BT V V étant le volume et T la température. En l'appliquant au rayonnement pour lequel U = U , : wV, où w ne dépend que de T, en déduire que : w : aT4, a étant un coefficient dont on précisera l'unité SI. \ b) On rappelle l'expression de l'énergie électromagnétique volumique spectrale W,, a la température T, donnée par la loi de Planck : V c" exp(Bhv)--l Quelle est la signification physique de B '? Calculer l'énergie électromagnétique volumique totale w. On utilisera la valeur numérique de l'intégrale suivante : W a 4 oo x" "R J...dx=_ 0expx--l 15 Relier a aux constantes fondamentales de la physique et calculer sa valeur SI. . ., . 3 , c) Montrer que l'entrop1e assoc1ee au rayonnement a pour express1on S =AT V, a une constante additive près, A étant une constante que l'on déterminera en fonction de a. En , . , . . . . , , . ,---1 _ déduire qu un rayonnement 1sentrop1que satisfait a une equation de la forme TVY -- Cte, y,. étant un facteur que l'on calculera. 3. Thermodynamique d'un gaz parfait en présence de rayonnement On considère un système de n moles d'un gaz parfait contenu dans une enceinte de volume V. Le rayonnement électromagnétique dans ce récipient est celui d'un gaz de photons en équilibre thermique avec le gaz parfait, à la température T. On admet que l'énergie interne et la press1on s'obtiennent en ajoutant l'énergie interne de rayonnement U, et la pression de rayonnement p,, aux quantités analogues U et pg}, relatives au gaz parfait : gp U=ng+Ur et p=pgp+pr Dans la suite, on désigne par y le rapport des capacités thermiques à pression et volume constants pour le gaz parfait et par oc le rapport de la pression pg}, sur la pression totale p. a) En appliquant les deux premiers principes de la thermodynamique à une évolution réversible élémentaire, établir l'expression suivante de la variation élémentaire de l'entropie du système : KdS =Y-- pÆ+12p, dT+(p T Y--1 g,,+4p,)dV K étant une quantité dont on donnera la dimension physique et que l'on exprimera en fonction de la température. b) En déduire l'expression de l'entropie du système. Le résultat obtenu était--il prévisible ? EUR) Trouver, en fonction de oc et y, l'expression du facteur 1", tel que, au cours d'une évolution isentropique, on ait : dT/T + (F -- l)dV/V : O . Tournez la page S.V.P. (1) Quelles sont alors les valeurs de F pour oc : l et pour oc : O ? Pour oc = 1 , on envisagera les cas des gaz parfaits monoatomiques et diatomiques. 4. Thermodynamique d'un gaz parfait autogravitant. Un gaz parfait est dit autogravitant lorsqu'on doit tenir compte de l'interaction gravitationnelle mutuelle entre les particules qui le constituent. On admet les deux hypothèses suivantes : i) L'énergie interne totale U est la somme de l'énergie interne du gaz parfait U gp et de l'énergie potentielle d'interaction gravitationnelle E I,, g . ii) Dans le référentiel du centre de masse du système, il existe, entre l'énergie cinétique Ek, associée aux mouvements des centres de masse des particules, et son énergie potentielle de gravitation E I,, g , la relation suivante : 215, + E,,g : 0 3) Montrer que cette dernière relation est précisément celle qui existe entre l'énergie cinétique et l'énergie potentielle de gravitation d'un satellite en mouvement circulaire uniforme autour de la Terre, par rapport au référentiel géocentrique. Commenter, dans ce cas, la phrase apparemment paradoxale suivante : « La vitesse du satellite augmente lorsqu'il est soumis à une force de freinage ». b) On rappelle les relations E k : 3nRT/ 2 et U gp : nC T entre E k, U T. Etablir l'expression suivante de l'énergie interne totale U du système : U : nBT(4 - 3y) et la température vm gp n étant le nombre de moles et B un coefficient que l'on exprimera en fonction de C... . c) Trouver la capacité thermique molaire à volume constant Cân , obtenue en tenant compte de la gravitation, en fonction de y et Cvm. Etudier les cas où 7 = 5/ 3 et y = 7/5 . Commenter à l'aide du résultat obtenu àla question B 1 .e. Fin de l'énoncé.